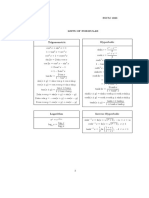
Formula Sheet DEF121
Formula Sheet DEF121
Download as pdf or txt
You might also like
- Calculus Formula Sheet IIDocument2 pagesCalculus Formula Sheet IICristan Dave ZablanNo ratings yet
- Linear Algebra AnswersDocument364 pagesLinear Algebra Answersdull_matterNo ratings yet
- Candela To Lumen Conversion CalculationDocument11 pagesCandela To Lumen Conversion CalculationSimon CondorNo ratings yet
- MATH 259 - Review Sheet (Prerequisite Topics) : (This Is NOT A Comprehensive List!)Document4 pagesMATH 259 - Review Sheet (Prerequisite Topics) : (This Is NOT A Comprehensive List!)Celal KermangilNo ratings yet
- Reviewsheet Formulas Ap Calc Ab 2006Document3 pagesReviewsheet Formulas Ap Calc Ab 2006teachopensourceNo ratings yet
- DX X dxn1Document3 pagesDX X dxn1jadhavadi5354No ratings yet
- Resumen FísicaDocument2 pagesResumen FísicaJosefa BelmarNo ratings yet
- Lecture 3 - Seperable First Order Differential EquationsDocument15 pagesLecture 3 - Seperable First Order Differential EquationsSaad2222No ratings yet
- 8.2 Table of Derivatives: D y D X !Document2 pages8.2 Table of Derivatives: D y D X !Sahil GouthamNo ratings yet
- IntegrationDocument2 pagesIntegrationomkarchavan16701No ratings yet
- FormulaDocument1 pageFormulabrentbasha17No ratings yet
- List of FormulaDocument3 pagesList of FormulaAnggun AureolaNo ratings yet
- 4 Standard Derivatives: JJ II J IDocument2 pages4 Standard Derivatives: JJ II J IJulián GuerreroNo ratings yet
- Chap 2 Calculus ECDocument28 pagesChap 2 Calculus ECMidhun BabuNo ratings yet
- Crossant Integral-Trigonometry - BWDocument2 pagesCrossant Integral-Trigonometry - BWMokshita JainNo ratings yet
- Lec 1Document15 pagesLec 1Muhammed YasserNo ratings yet
- List of Formula sscm1023 Chap1 To 4Document4 pagesList of Formula sscm1023 Chap1 To 4Aisyah NadhirahNo ratings yet
- List of FormulaDocument4 pagesList of Formulasofiea hazriNo ratings yet
- List of Formulae Trigo-Sscm1023Document3 pagesList of Formulae Trigo-Sscm1023aieyinHengNo ratings yet
- Derivatives CommonDocument2 pagesDerivatives Commonravi3355No ratings yet
- Derivative of Trigonometric FunctionsDocument1 pageDerivative of Trigonometric Functionsmike capitoNo ratings yet
- DERIVATIVES (Formula)Document2 pagesDERIVATIVES (Formula)Geojanni PangibitanNo ratings yet
- Formula Paper For Calculus120 and Pre Calculus BDocument12 pagesFormula Paper For Calculus120 and Pre Calculus BShreya PodderNo ratings yet
- 03 Indefinite Integration 53-68Document11 pages03 Indefinite Integration 53-68eamcetmaterials75% (4)
- CALCULUSDocument1 pageCALCULUSRhea AgrawalNo ratings yet
- DX D X DX D X X X X: 2 Cos - 2 Cos 1 2 - 2 Cos 2 Sin 2 Sin 2Document7 pagesDX D X DX D X X X X: 2 Cos - 2 Cos 1 2 - 2 Cos 2 Sin 2 Sin 2Hamad KtkNo ratings yet
- Tabla Derivadas e IntegralesDocument2 pagesTabla Derivadas e Integralesandrea valdiri100% (1)
- Tan X Sin X Cos X Cot X Cos X Sin X CSC X 1 Sin X Sec X 1 Cos X Cot X 1 Tan X Sin Tan CotDocument2 pagesTan X Sin X Cos X Cot X Cos X Sin X CSC X 1 Sin X Sec X 1 Cos X Cot X 1 Tan X Sin Tan CotAudrey LeeNo ratings yet
- Integration LPDocument2 pagesIntegration LPtestNo ratings yet
- Fórmulas Derivadas e IntegralesDocument1 pageFórmulas Derivadas e Integralesmelissatv80No ratings yet
- Trig ReviewDocument3 pagesTrig ReviewSayee SaranNo ratings yet
- A Table of IntegralsDocument2 pagesA Table of IntegralsDytchemNo ratings yet
- Mathematical Physics Useful Formulae PDFDocument29 pagesMathematical Physics Useful Formulae PDFKunal Rana100% (1)
- Integration 101 Examples With Full Solutions Not MineDocument34 pagesIntegration 101 Examples With Full Solutions Not MineHyojinNo ratings yet
- MiscelaniasDocument5 pagesMiscelaniasxoliday639No ratings yet
- Calculus Formulae SheetDocument2 pagesCalculus Formulae Sheetbio7eNo ratings yet
- Calculus Test 2017Document3 pagesCalculus Test 2017Saeed Ahmed NoonariNo ratings yet
- Integration Using Trig IdentitiesDocument19 pagesIntegration Using Trig IdentitiesJose VillegasNo ratings yet
- Formula For Final Exam UpdatedDocument5 pagesFormula For Final Exam Updatedalyaa nishaNo ratings yet
- Calculo DiferencialDocument4 pagesCalculo Diferencialprax.cortazar.333No ratings yet
- Exercise SheetsDocument34 pagesExercise Sheetssyz1103174840No ratings yet
- 2da PC CÁLCULO DIFERENCIALDocument9 pages2da PC CÁLCULO DIFERENCIALJimena Alfaro LoyolaNo ratings yet
- Pablocdch - Algebra Calculus I and IIDocument2 pagesPablocdch - Algebra Calculus I and IILeartB YTNo ratings yet
- D Efren SiationDocument17 pagesD Efren SiationMotivational BabaNo ratings yet
- Chapter 5-O.D.E. New VersionDocument100 pagesChapter 5-O.D.E. New VersionJohn Niko Alvarez AmaroNo ratings yet
- Derivadas IntegralesDocument2 pagesDerivadas IntegralesvalentinaNo ratings yet
- Trig1 REVIEWERRRRRDocument2 pagesTrig1 REVIEWERRRRRHannah Pamela BautistaNo ratings yet
- 7.6 Trigonometric 7Document7 pages7.6 Trigonometric 7Hin Wa LeungNo ratings yet
- 7.methods of Differentiation and Applications of DerivativesTheoryDocument27 pages7.methods of Differentiation and Applications of DerivativesTheoryDevansh ParasharNo ratings yet
- Table of IntegralsDocument2 pagesTable of IntegralsJeanGallegoNo ratings yet
- MAST10006 Calculus 2 Exercise Sheets 2023s1Document34 pagesMAST10006 Calculus 2 Exercise Sheets 2023s1Shyam MahendraNo ratings yet
- Ntegraalide TabelDocument1 pageNtegraalide Tabelmarikaanissimov77No ratings yet
- Calculus FormulaDocument2 pagesCalculus FormulaTemp ShaheenNo ratings yet
- Log and Exp FunctionDocument5 pagesLog and Exp FunctionAparjan PatrikaNo ratings yet
- Formula CardDocument5 pagesFormula CardJerson CupidóNo ratings yet
- 2da PC CálculoDocument9 pages2da PC CálculoSara Liz GutierrezNo ratings yet
- Diff Int ReviewDocument2 pagesDiff Int Reviewsadam gebiNo ratings yet
- Formulario para Derivadas - SymbolabDocument2 pagesFormulario para Derivadas - SymbolabAbraham CandiaNo ratings yet
- Integration: Antiderivative of F or A Primitive of FDocument6 pagesIntegration: Antiderivative of F or A Primitive of Fvanesh wildNo ratings yet
- N6Test1 T1 21 Formula SheetDocument4 pagesN6Test1 T1 21 Formula SheetMpezaNo ratings yet
- Integrales: 1 X 1 X 1+x 1 1 + 1 1 1 XDocument2 pagesIntegrales: 1 X 1 X 1+x 1 1 + 1 1 1 XKdNo ratings yet
- Tutorial 7Document2 pagesTutorial 7Andy NgoNo ratings yet
- EEE20001 Lab E1 Group 22Document7 pagesEEE20001 Lab E1 Group 22Andy NgoNo ratings yet
- Book 1Document2 pagesBook 1Andy NgoNo ratings yet
- Lab E4 Group 22 PDFDocument12 pagesLab E4 Group 22 PDFAndy NgoNo ratings yet
- File IO PracticeDocument1 pageFile IO PracticeAndy NgoNo ratings yet
- Lab E2 Group 22Document7 pagesLab E2 Group 22Andy NgoNo ratings yet
- Assignment 1Document5 pagesAssignment 1Andy NgoNo ratings yet
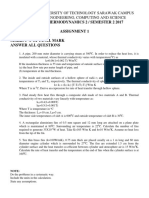
- Mee40001 Thermodynamics 2 / Semester 2 2017 Assignment 1 DUE DATE: 25.09.2017 Mark: 5 % of Final Mark Answer All QuestionsDocument1 pageMee40001 Thermodynamics 2 / Semester 2 2017 Assignment 1 DUE DATE: 25.09.2017 Mark: 5 % of Final Mark Answer All QuestionsAndy NgoNo ratings yet
- Desafio MatematicoDocument2 pagesDesafio Matematicokaladyma martinezNo ratings yet
- Udupi Maths Prep Exam-Feb-2023-24Document4 pagesUdupi Maths Prep Exam-Feb-2023-24swetadigital123No ratings yet
- Motion in Two or Three DimesionsDocument14 pagesMotion in Two or Three DimesionsQuynh Mai Do LeNo ratings yet
- From Classical To Quantum Field Theory (Davison Soper)Document12 pagesFrom Classical To Quantum Field Theory (Davison Soper)Rosemary Muñoz100% (2)
- H. Ratio and Similar ShapesDocument12 pagesH. Ratio and Similar ShapesDaSubirNo ratings yet
- Chapter 2 BstaticsofparticleDocument25 pagesChapter 2 BstaticsofparticlejamaludinizzadNo ratings yet
- Phys 111 Final Exam Formulas - Fall 2011: DT DWDocument1 pagePhys 111 Final Exam Formulas - Fall 2011: DT DWVenkataramanan SureshNo ratings yet
- Eg 07 Planar - Dips6Document1 pageEg 07 Planar - Dips6Miguel Sanchez CastilloNo ratings yet
- Transmission AngleDocument19 pagesTransmission AngleSangeeth KayamkulamNo ratings yet
- Chapter 5 Angles and PolygonsDocument23 pagesChapter 5 Angles and PolygonssamNo ratings yet
- These Are The Questions I Wanted To Be Part of The Live Video, Sir. Thank YouDocument4 pagesThese Are The Questions I Wanted To Be Part of The Live Video, Sir. Thank YouJaimie Del MundoNo ratings yet
- FX e X X X FX NX FX X X: The Fourier Series For in The IntervalDocument3 pagesFX e X X X FX NX FX X X: The Fourier Series For in The IntervalS AdilakshmiNo ratings yet
- Physics 11Document12 pagesPhysics 11Jane100% (1)
- Performance Evaluation of Distance Metrics in The Clustering AlgorithmsDocument14 pagesPerformance Evaluation of Distance Metrics in The Clustering AlgorithmsAnkitSinghNo ratings yet
- 2 5 Literal Equations and FormulasDocument4 pages2 5 Literal Equations and Formulasapi-295637237No ratings yet
- Maths Formula Pocket Book Maths Formula-Page63Document1 pageMaths Formula Pocket Book Maths Formula-Page63Ernie LahaylahayNo ratings yet
- Calculate Volume of A Hollow Cylinder and Its Surface AreaDocument4 pagesCalculate Volume of A Hollow Cylinder and Its Surface Areashiel175No ratings yet
- ConvexityDocument30 pagesConvexitylionshare148No ratings yet
- A Note On The Derivation of FRechet and GateauxDocument7 pagesA Note On The Derivation of FRechet and GateauxjohngueroNo ratings yet
- Quantitative Aptitude For CAT XAT IIFT CMAT MAT Bank PO SSC 2nd - by EasyEngineering - Net-01Document709 pagesQuantitative Aptitude For CAT XAT IIFT CMAT MAT Bank PO SSC 2nd - by EasyEngineering - Net-01arushi05No ratings yet
- Solving Trigo FuncDocument11 pagesSolving Trigo FuncZarini AhmadNo ratings yet
- Topic 7-Coordinate Geometry of Straight LinesDocument8 pagesTopic 7-Coordinate Geometry of Straight Linesmaths_w_mr_tehNo ratings yet
- Triangle Angel Sum Worksheet 4Document2 pagesTriangle Angel Sum Worksheet 4sharrawyNo ratings yet
- Mathematical TherminologyDocument16 pagesMathematical Therminologyamara abdelkarimeNo ratings yet
- Partial DerivativesDocument9 pagesPartial DerivativesesNo ratings yet
- Wind Load Clauses, Formulas and Equations - Part-5Document7 pagesWind Load Clauses, Formulas and Equations - Part-5Adam Michael GreenNo ratings yet
- Math 1A: Calculus Worksheets: 7 EditionDocument82 pagesMath 1A: Calculus Worksheets: 7 EditionYah Kang SeulgiNo ratings yet
- HKDSE Mathematics Paper 1 Compulsory Part (Conventional Questions)Document6 pagesHKDSE Mathematics Paper 1 Compulsory Part (Conventional Questions)gursimranNo ratings yet