Download as pdf or txt
You might also like
- 1997-2003 TF R7 R9 Rodeo Workshop ManualDocument2 pages1997-2003 TF R7 R9 Rodeo Workshop ManualNop60% (5)
- Kobota z600Document4 pagesKobota z600Nop0% (1)
- Men in The Sun and Other Palestinian Stories - Ghassan KanafaniDocument118 pagesMen in The Sun and Other Palestinian Stories - Ghassan Kanafanianthroposophical80% (5)
- Compressor GE H-302 SpecDocument19 pagesCompressor GE H-302 SpecNop50% (2)
- Accident Prevention Training "STOP 6"Document26 pagesAccident Prevention Training "STOP 6"SANTOSH PRADHAN100% (2)
- 4110 Manual COMPLETO DENSOMETRO GURLEY PDFDocument21 pages4110 Manual COMPLETO DENSOMETRO GURLEY PDFZenón NoreñaNo ratings yet
- Thermo Fisher Scientific XL3 XL2 Hardware OverviewDocument37 pagesThermo Fisher Scientific XL3 XL2 Hardware OverviewMAmar100% (1)
- ICM Water & Particle Counter ManualDocument6 pagesICM Water & Particle Counter ManualHanna SofíaNo ratings yet
- TD107 Operation Manual PDFDocument42 pagesTD107 Operation Manual PDFshalabyahmedNo ratings yet
- Sn39mta 1Document3 pagesSn39mta 1pablogoncNo ratings yet
- Industrial Safety Supply, Inc.: Francisco A. LopezDocument29 pagesIndustrial Safety Supply, Inc.: Francisco A. Lopezart031125100% (1)
- Air Purifier CE Test ReportDocument36 pagesAir Purifier CE Test ReportMArcelaNo ratings yet
- Parker Valve Mobile Pulsar VPL-VP-VPO Model Code Book HY14-0108Document32 pagesParker Valve Mobile Pulsar VPL-VP-VPO Model Code Book HY14-0108NopNo ratings yet
- Volvo 940 Owners Manual 1991Document205 pagesVolvo 940 Owners Manual 1991NopNo ratings yet
- #ThrowbackThursday: H.E. Butt Piggly WigglyDocument1 page#ThrowbackThursday: H.E. Butt Piggly WigglycallertimesNo ratings yet
- Guia de Tadelakt Inglés PDFDocument31 pagesGuia de Tadelakt Inglés PDFEllaNo ratings yet
- PATHOPHYSIOLOGY UrtiDocument2 pagesPATHOPHYSIOLOGY UrtiCris Soland88% (8)
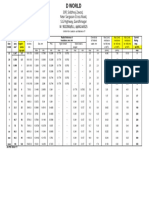
- Test Certificate: D & H Secheron Electrodes Pvt. LTDDocument1 pageTest Certificate: D & H Secheron Electrodes Pvt. LTDrahulkhokhar2023No ratings yet
- BioChem Pinch Valve User ManualDocument33 pagesBioChem Pinch Valve User ManualthynameisraymondNo ratings yet
- SYS600 - IEC 61107 Master ProtocolDocument32 pagesSYS600 - IEC 61107 Master ProtocolNguyen Duc100% (1)
- Test Certificate For Multi-Turn Actuators: Setting and Functional TestDocument1 pageTest Certificate For Multi-Turn Actuators: Setting and Functional TestSouvik DaluiNo ratings yet
- Accepptance Test Report of Acsr Rabbit ConductoorDocument1 pageAccepptance Test Report of Acsr Rabbit ConductoorFaizi MNo ratings yet
- .Technical Detail of UNINYVIN CABLEDocument1 page.Technical Detail of UNINYVIN CABLEJayNo ratings yet
- Calibration CertificateDocument2 pagesCalibration Certificatenate anantathatNo ratings yet
- Kit 138 New Bresle Salt PDFDocument2 pagesKit 138 New Bresle Salt PDFDian FaraNo ratings yet
- Vacuum Box Test Procedure: PurposeDocument4 pagesVacuum Box Test Procedure: Purposesaravan1891No ratings yet
- LP Gloster Pricelist Aug14 PDFDocument5 pagesLP Gloster Pricelist Aug14 PDFvjtheeeNo ratings yet
- Hamim Enterprise: A Life Safety CompanyDocument13 pagesHamim Enterprise: A Life Safety CompanyTaher AzadNo ratings yet
- Preventing and Identifying Potential Failures of Dead Break Elbows in Wind Farm Application - Brian - Peyres PDFDocument6 pagesPreventing and Identifying Potential Failures of Dead Break Elbows in Wind Farm Application - Brian - Peyres PDFSatadal DashNo ratings yet
- Convey Weigh "Belt Pro" Conveyor Belt Scales: High PerformanceDocument4 pagesConvey Weigh "Belt Pro" Conveyor Belt Scales: High PerformanceDAVID ALBERTO MORA CARDENASNo ratings yet
- SRI SensorDocument7 pagesSRI SensorArun GuptaNo ratings yet
- Hvws System For 10 Mva TransformerDocument26 pagesHvws System For 10 Mva Transformershashi ranjanNo ratings yet
- DPT Format.Document1 pageDPT Format.selvakumarNo ratings yet
- Op - Artes 400 Ii - EngDocument19 pagesOp - Artes 400 Ii - EngLuis Aguero CantilloNo ratings yet
- Belt Drive AllignmentDocument3 pagesBelt Drive AllignmentMichaelNo ratings yet
- 802P Universal Indicator Manual 350Document15 pages802P Universal Indicator Manual 350Davesh JadonNo ratings yet
- Actuator Data SheetsDocument4 pagesActuator Data SheetsCibi SubramaniamNo ratings yet
- Crompton - Qap-Rev-0Document6 pagesCrompton - Qap-Rev-0gulatimanish1985No ratings yet
- Tests According To IEC-En Standards (WAGO)Document11 pagesTests According To IEC-En Standards (WAGO)va3ttnNo ratings yet
- Pic152a ViDocument2 pagesPic152a Viiyappan5016100% (1)
- StandardsDocument30 pagesStandardsYuan GaoNo ratings yet
- Advantage & Disadv of Bellow & Slip JointDocument2 pagesAdvantage & Disadv of Bellow & Slip JointSharun Suresh0% (1)
- DCS Interview QuestionDocument8 pagesDCS Interview QuestionZulhelmiNo ratings yet
- RDSO PE SPEC AC 0138-2009 Rev 2 or LatestDocument23 pagesRDSO PE SPEC AC 0138-2009 Rev 2 or LatestRajnish KumarNo ratings yet
- SensorDocument11 pagesSensorharshitNo ratings yet
- Eddy Probe SystemsDocument44 pagesEddy Probe Systemsravide76No ratings yet
- 60.30-069 - 1994specification For Differential PressureDocument5 pages60.30-069 - 1994specification For Differential PressurepradeepNo ratings yet
- ProductCatalog PYROMATIONDocument212 pagesProductCatalog PYROMATIONDiego John Gavilanes UvidiaNo ratings yet
- Honeywell Genetron AZ20, R410A Specs PDFDocument18 pagesHoneywell Genetron AZ20, R410A Specs PDFFRALEJONo ratings yet
- Saudi Aramco Test Report: MV Cablebus High-Potential Withstand Testing SATR-P-3235 3-Jul-18 ElectDocument5 pagesSaudi Aramco Test Report: MV Cablebus High-Potential Withstand Testing SATR-P-3235 3-Jul-18 Electkarthi51289No ratings yet
- CableFixing PDFDocument6 pagesCableFixing PDFhumshkhNo ratings yet
- 744 and 745 Load Cells - 2586Document1 page744 and 745 Load Cells - 2586Luis IglesiasNo ratings yet
- MiCOM P12x PDFDocument8 pagesMiCOM P12x PDFsyamsudin4077100% (1)
- Stripper InfoDocument30 pagesStripper Infonedian_2006No ratings yet
- PM 10Document76 pagesPM 10Luis ManzoNo ratings yet
- 11kw 220v 1450rpm Afs225x Datasheet Jop DCDocument6 pages11kw 220v 1450rpm Afs225x Datasheet Jop DCcherif yahyaouiNo ratings yet
- FL4000H Multi-Spectrum Infrared Flame DetectorDocument2 pagesFL4000H Multi-Spectrum Infrared Flame DetectorRomdhoni Widyo BaskoroNo ratings yet
- Certificatewelding Machine CertificatesDocument1 pageCertificatewelding Machine Certificatestariq_hussain_20No ratings yet
- K19500 Operation ManualDocument14 pagesK19500 Operation Manualmoh_ichwanuddinNo ratings yet
- B24 Power Meter RegistersDocument27 pagesB24 Power Meter RegistersRoy ChaiNo ratings yet
- QPS-C5 Industrial & Costal Painting Procedure-OP - PP - WI - 006 - C5 PDFDocument4 pagesQPS-C5 Industrial & Costal Painting Procedure-OP - PP - WI - 006 - C5 PDFDeepak UpadhyayNo ratings yet
- Flash RT - The Inspector Model 200Document12 pagesFlash RT - The Inspector Model 200MohdHuzairiRusliNo ratings yet
- AUMA Katalog Techn Unterlagen Getriebe enDocument248 pagesAUMA Katalog Techn Unterlagen Getriebe enleocastarlenasNo ratings yet
- XXG-Ceramic Tube Directional: Max. Penetrate A3 Steel (MM)Document2 pagesXXG-Ceramic Tube Directional: Max. Penetrate A3 Steel (MM)SerkanNo ratings yet
- Shakun Polymers Limited: Spl-Afosr High Performance PVC CompoundDocument2 pagesShakun Polymers Limited: Spl-Afosr High Performance PVC CompoundquycoctuNo ratings yet
- Stator RTD Sensor 300Document4 pagesStator RTD Sensor 300Cristian GarcíaNo ratings yet
- Magnetic Pick Ups BrochureDocument2 pagesMagnetic Pick Ups Brochureadswa2000100% (1)
- Sensors SpeedhallDocument2 pagesSensors SpeedhallahmadshikemohmadNo ratings yet
- Photo Detectors ManualDocument14 pagesPhoto Detectors ManualJosé PiracésNo ratings yet
- Truing Commutators and Slip-RingsDocument4 pagesTruing Commutators and Slip-RingsTariq AhmedNo ratings yet
- Rod End: A Product DescriptionsDocument18 pagesRod End: A Product DescriptionsNopNo ratings yet
- Rod End SeriesDocument14 pagesRod End SeriesNopNo ratings yet
- Rod Ends PHS PHSB POS POSB PHSA PBDocument8 pagesRod Ends PHS PHSB POS POSB PHSA PBNopNo ratings yet
- Charging System: Battery Load (A)Document15 pagesCharging System: Battery Load (A)NopNo ratings yet
- Specific Safety RulesDocument7 pagesSpecific Safety RulesNopNo ratings yet
- Technical Data: PBS Push ButtonsDocument2 pagesTechnical Data: PBS Push ButtonsNopNo ratings yet
- 1996 Ford Ranger 1996 Ford RangerDocument2 pages1996 Ford Ranger 1996 Ford RangerNopNo ratings yet
- PBL3 Combination Push Buttons and Pilot LightsDocument2 pagesPBL3 Combination Push Buttons and Pilot LightsNopNo ratings yet
- G310 Product Manual - (Compatible With Crimson 2) (For Reference Only - See G310C2G310R2G310S2 For New Designs) PDFDocument8 pagesG310 Product Manual - (Compatible With Crimson 2) (For Reference Only - See G310C2G310R2G310S2 For New Designs) PDFNopNo ratings yet
- CVV CableDocument7 pagesCVV CableNopNo ratings yet
- Hyundai: No Engine Car Name/Year/Model Full Set Head Set Cylinder HeadDocument8 pagesHyundai: No Engine Car Name/Year/Model Full Set Head Set Cylinder HeadNopNo ratings yet
- DJM Monitor Boxes For Temperature ControllersDocument3 pagesDJM Monitor Boxes For Temperature ControllersNopNo ratings yet
- 1224 Ridgid PDFDocument7 pages1224 Ridgid PDFNopNo ratings yet
- LIT-C Stainless Steel Valves-USA LoResDocument20 pagesLIT-C Stainless Steel Valves-USA LoResNopNo ratings yet
- Fisher ET Control Valve PDFDocument48 pagesFisher ET Control Valve PDFNopNo ratings yet
- Users Manual: 99 Washington Street Melrose, MA 02176 Phone 781-665-1400 Toll Free 1-800-517-8431Document51 pagesUsers Manual: 99 Washington Street Melrose, MA 02176 Phone 781-665-1400 Toll Free 1-800-517-8431NopNo ratings yet
- Versa SolenoidValves CatDocument28 pagesVersa SolenoidValves CatNopNo ratings yet
- Chem 373 - Dry Lab II: Practice For The Quantum Mechanical PostulatesDocument2 pagesChem 373 - Dry Lab II: Practice For The Quantum Mechanical PostulatesNuansak3100% (1)
- Environmental Biodegradation of Synthetic Polymers II. Biodegradation of Different Polymer GroupsDocument17 pagesEnvironmental Biodegradation of Synthetic Polymers II. Biodegradation of Different Polymer GroupssonchemenNo ratings yet
- University of Cordilleras College of Nursing NCP: Mycobacterium TuberculosisDocument3 pagesUniversity of Cordilleras College of Nursing NCP: Mycobacterium TuberculosisLyn MhoreNo ratings yet
- Hosea 4:6: Israelite Ignorance: Cross ReferencesDocument4 pagesHosea 4:6: Israelite Ignorance: Cross ReferencesEYE EYENo ratings yet
- 6.1. Past Tense and Present Perfect: During Your Holiday? When You Were Younger? Last Year?Document10 pages6.1. Past Tense and Present Perfect: During Your Holiday? When You Were Younger? Last Year?GabrielaLeNo ratings yet
- SIPOC - PUVANA Water 2022Document22 pagesSIPOC - PUVANA Water 2022Ahmed HussienNo ratings yet
- Incentive Scheme 2008 As Amended Upto 31.12Document35 pagesIncentive Scheme 2008 As Amended Upto 31.12apu_biswasNo ratings yet
- 2.04 BrucknerDocument17 pages2.04 BrucknerSon NguyenNo ratings yet
- First Quarter Summative TestDocument12 pagesFirst Quarter Summative TestFlorence Lizardo Liwanag100% (1)
- Module 5 TeamsportsDocument18 pagesModule 5 Teamsportszedy gullesNo ratings yet
- 3.7 Running Well Completion PDFDocument19 pages3.7 Running Well Completion PDFJohn CooperNo ratings yet
- Economic Growth of Information Technology (It) Industry On The Indian EconomyDocument4 pagesEconomic Growth of Information Technology (It) Industry On The Indian EconomyijcnesNo ratings yet
- Application Forms PDFDocument2 pagesApplication Forms PDFsnhd_swprNo ratings yet
- FM ModulationDocument6 pagesFM ModulationVishwanath Petli100% (2)
- 2nd Bhaskar Steel Bss Power Quotation - (New)Document4 pages2nd Bhaskar Steel Bss Power Quotation - (New)Vijay TarakNo ratings yet
- Bioqt 01Document84 pagesBioqt 01Osama AlrawabNo ratings yet
- Hsmarine Tugs and WorkboatsDocument3 pagesHsmarine Tugs and WorkboatsBoruida MachineryNo ratings yet
- Panda KasaharaDocument3 pagesPanda Kasaharaapi-204191877No ratings yet
- Esp 1904 A - 70 TPH o & M ManualDocument50 pagesEsp 1904 A - 70 TPH o & M Manualpulakjaiswal85No ratings yet
- Witch Hunters Errata PDFDocument6 pagesWitch Hunters Errata PDFLorenzo SaldenNo ratings yet
- Unit V-Life Assisting and Therapeutic Devices Cardiac PacemakerDocument17 pagesUnit V-Life Assisting and Therapeutic Devices Cardiac PacemakernsrimadhavarajaNo ratings yet
- Lessosn 1: Aquatic Activities: at The End of This Chapter, The Student Will Be Able ToDocument14 pagesLessosn 1: Aquatic Activities: at The End of This Chapter, The Student Will Be Able ToJames Vidad100% (1)
- PT OrthoDocument129 pagesPT OrthoHarish Kumar NNo ratings yet
- Ekoheat Brochure EngelsDocument4 pagesEkoheat Brochure EngelsNoviantoNo ratings yet
- Describing Types of Technical ProblemsDocument2 pagesDescribing Types of Technical ProblemsDonny PranataNo ratings yet