RTS Lec5n
RTS Lec5n
Download as pdf or txt
You might also like
- Top Level View of Computer Function and InterconnectionDocument38 pagesTop Level View of Computer Function and Interconnectionhsi3No ratings yet
- Digital Control: Ahmed Younis Ahmed 20140208Document21 pagesDigital Control: Ahmed Younis Ahmed 20140208Ahmed YounisNo ratings yet
- 03 BusesDocument55 pages03 Busesparadox.aarNo ratings yet
- Module 1Document36 pagesModule 1shruthi p rNo ratings yet
- Computer PerformanceDocument27 pagesComputer Performancehackstar742No ratings yet
- Computer Organization NotesDocument116 pagesComputer Organization NotesrajamaheshNo ratings yet
- Module 3, Notes PDFDocument17 pagesModule 3, Notes PDFShankar MNo ratings yet
- CSADocument68 pagesCSASonu LakraNo ratings yet
- Mbed Course Notes - Timers and InterruptsDocument20 pagesMbed Course Notes - Timers and InterruptszaddlerNo ratings yet
- Programmable Logic Controller (PLC) Is A Digital Computer Used For The Automation of VariousDocument23 pagesProgrammable Logic Controller (PLC) Is A Digital Computer Used For The Automation of VariousSunil ChaudhariNo ratings yet
- Gce Electronics Book Chapter 6Document24 pagesGce Electronics Book Chapter 6m.b.homsyNo ratings yet
- L-2 (Computer Performance)Document47 pagesL-2 (Computer Performance)jubairahmed1678No ratings yet
- William Stallings Computer Organization and Architecture 8 Edition Computer Evolution and PerformanceDocument28 pagesWilliam Stallings Computer Organization and Architecture 8 Edition Computer Evolution and PerformanceHaider Ali ButtNo ratings yet
- Module 5Document73 pagesModule 5Achsah K VijuNo ratings yet
- 2 Ch1 Npsf824lec2Document19 pages2 Ch1 Npsf824lec2baraalawadi98No ratings yet
- Programmable Logic Controller: Engr - Jama Adam SalahDocument158 pagesProgrammable Logic Controller: Engr - Jama Adam Salahjustus KamenyeNo ratings yet
- More Notes On ESDocument25 pagesMore Notes On EScharles kiarieNo ratings yet
- 32 Digital ControllersDocument25 pages32 Digital ControllersKARTHIK S SNo ratings yet
- Performance MatricesDocument14 pagesPerformance Matricesakpbbk123No ratings yet
- Unit 5 ErtosDocument28 pagesUnit 5 ErtosAbhi VarmaNo ratings yet
- Fault Tolerance Techniques: Unit 3Document40 pagesFault Tolerance Techniques: Unit 3Luis AndersonNo ratings yet
- Evolution of OSDocument39 pagesEvolution of OS21PC12 - GOKUL DNo ratings yet
- Programmable Logic ControllerDocument10 pagesProgrammable Logic Controllerfarah nazNo ratings yet
- CSC 205 - 2 Instruction Processing 2023-2024Document35 pagesCSC 205 - 2 Instruction Processing 2023-2024hahnonimusNo ratings yet
- FMPM Unit 5Document41 pagesFMPM Unit 5riddheshsawntNo ratings yet
- Module 3 FinalDocument50 pagesModule 3 Finaldevpgaonkar3No ratings yet
- PLC BasicsDocument20 pagesPLC BasicsTalha_Gujjar_4662No ratings yet
- Unit 6Document31 pagesUnit 6Apurva JarwalNo ratings yet
- PLCDocument34 pagesPLCManisha Sudeep Kaintura100% (2)
- Lecture 3Document38 pagesLecture 3tarekegn utaNo ratings yet
- Control Unit OrganizationDocument5 pagesControl Unit OrganizationAniket SrivastavaNo ratings yet
- Lesson Review1 ITEL460Document42 pagesLesson Review1 ITEL460Orville BalangueNo ratings yet
- Chapter 4Document66 pagesChapter 4hb2202099No ratings yet
- PerformanceDocument35 pagesPerformanceBosong ChngNo ratings yet
- L-2 (Computer Performance)Document52 pagesL-2 (Computer Performance)Imran KhanNo ratings yet
- Hardwired Control UnitDocument2 pagesHardwired Control Unitcafeinternet2004No ratings yet
- Class 1.6Document27 pagesClass 1.6Gethzi AkilaNo ratings yet
- RTS Slids Lec4Document21 pagesRTS Slids Lec4stephen562001No ratings yet
- Module 1 Operating System OverviewDocument20 pagesModule 1 Operating System OverviewJeet NakraniNo ratings yet
- Embedded and Real-Time Operating Systems: Course Code: 70439Document21 pagesEmbedded and Real-Time Operating Systems: Course Code: 70439SrikanthNo ratings yet
- Microwave Oven 1Document20 pagesMicrowave Oven 1Praveen J LNo ratings yet
- Unit 2 - System BusesDocument28 pagesUnit 2 - System BusesS SNo ratings yet
- Intro To PLC, Its Function, and ApplicationDocument24 pagesIntro To PLC, Its Function, and ApplicationHassan M KhanNo ratings yet
- PLC Applications 1716345432Document63 pagesPLC Applications 1716345432pradeep1987coolNo ratings yet
- Share ProcesssssssDocument42 pagesShare ProcesssssssMuskan JainNo ratings yet
- RTS-unit 3Document58 pagesRTS-unit 3nawnish kumarNo ratings yet
- PLC Based Elevator Control System-1Document26 pagesPLC Based Elevator Control System-1Belete GetachewNo ratings yet
- E-Note 6169 Content Document 20240206010804PMDocument49 pagesE-Note 6169 Content Document 20240206010804PMtnimisha806No ratings yet
- Automation Project ReportDocument32 pagesAutomation Project ReportVicky Chaudhary100% (1)
- CSC159 Ch4 Interrupt - StackDocument14 pagesCSC159 Ch4 Interrupt - StackMohd FaizrulNo ratings yet
- Chapter OneDocument51 pagesChapter Oneasresahegnmeklit13No ratings yet
- Unit 3Document73 pagesUnit 3Davda NishitNo ratings yet
- Lab 12Document17 pagesLab 12Naz MemonNo ratings yet
- Assignment-2 Ami Pandat Parallel Processing: Time ComplexityDocument12 pagesAssignment-2 Ami Pandat Parallel Processing: Time ComplexityVICTBTECH SPUNo ratings yet
- PLC 2Document26 pagesPLC 2UM ZaidNo ratings yet
- Faulttolerancech5 150426005118 Conversion Gate02Document24 pagesFaulttolerancech5 150426005118 Conversion Gate02Sofiene GuedriNo ratings yet
- Explain The Parts of The NC Machine/ Explain The Block Diagram of NC Machine. (3/4 Marks)Document5 pagesExplain The Parts of The NC Machine/ Explain The Block Diagram of NC Machine. (3/4 Marks)rajeshNo ratings yet
- PLC Programming & Implementation: An Introduction to PLC Programming Methods and ApplicationsFrom EverandPLC Programming & Implementation: An Introduction to PLC Programming Methods and ApplicationsNo ratings yet
- Practical, Made Easy Guide To Building, Office And Home Automation Systems - Part OneFrom EverandPractical, Made Easy Guide To Building, Office And Home Automation Systems - Part OneNo ratings yet
- Preliminary Specifications: Programmed Data Processor Model Three (PDP-3) October, 1960From EverandPreliminary Specifications: Programmed Data Processor Model Three (PDP-3) October, 1960No ratings yet
- TIDocument73 pagesTIrAM100% (8)
- Experiment No. 6 Design and Implementation of Shift RegistersDocument17 pagesExperiment No. 6 Design and Implementation of Shift RegistersRaghuveerNo ratings yet
- What Is A Timing Diagram?: Instruction CycleDocument5 pagesWhat Is A Timing Diagram?: Instruction CycleNishal NawosahNo ratings yet
- Timing Diagram of 8085 (Cs502)Document34 pagesTiming Diagram of 8085 (Cs502)aksNo ratings yet
- RF-Based Multiple Device Control Using MicrocontrollerDocument7 pagesRF-Based Multiple Device Control Using Microcontrollermv mvNo ratings yet
- Unit 3 8086 Microprocessor InterfacingDocument29 pagesUnit 3 8086 Microprocessor InterfacingDere JesusNo ratings yet
- FPGA DS 02056 3 9 MachXO2 Family Data SheetDocument122 pagesFPGA DS 02056 3 9 MachXO2 Family Data Sheetthe hoangNo ratings yet
- Intel MAX 10 FPGA Device: Subscribe Send Feedback M10-OVERVIEW - 2017.12.15 PDF HTMLDocument14 pagesIntel MAX 10 FPGA Device: Subscribe Send Feedback M10-OVERVIEW - 2017.12.15 PDF HTMLzokandza4092No ratings yet
- A Synchronous ChipDocument22 pagesA Synchronous ChipAbhinay AgrawalNo ratings yet
- USB 2.0 Board Design and Layout Guidelines: Application ReportDocument11 pagesUSB 2.0 Board Design and Layout Guidelines: Application Reportkarim salimiNo ratings yet
- DE10-Lite User ManualDocument74 pagesDE10-Lite User ManualJoel Pérez OscáteguiNo ratings yet
- F If o Depth Calculation Made Easy 2Document8 pagesF If o Depth Calculation Made Easy 2kotra devinagaphanindraNo ratings yet
- CompArch - Chapter OneDocument9 pagesCompArch - Chapter Onegirum sisayNo ratings yet
- Creativity Lab - Ee 223 B Experiment No. 4: AIM: To Make An Automatic Visitor Counter Circuit Using CD4026 IC and LDRDocument6 pagesCreativity Lab - Ee 223 B Experiment No. 4: AIM: To Make An Automatic Visitor Counter Circuit Using CD4026 IC and LDRhloNo ratings yet
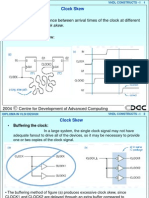
- Clock SkewDocument9 pagesClock Skewnaveenchand_a6No ratings yet
- NI Tutorial 2835 enDocument14 pagesNI Tutorial 2835 enurielNo ratings yet
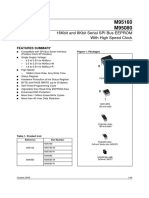
- 16kbit and 8kbit Serial SPI Bus EEPROM With High Speed ClockDocument40 pages16kbit and 8kbit Serial SPI Bus EEPROM With High Speed ClockDanny EversonNo ratings yet
- Fire Fighter RobotDocument39 pagesFire Fighter RobotGautam GuptaNo ratings yet
- Clock System On The MSP430: CJ GanierDocument2 pagesClock System On The MSP430: CJ GanierTufan TufanNo ratings yet
- Automatic Room Light ControllerDocument36 pagesAutomatic Room Light Controllerlove2honney100% (1)
- Adau1452 1451 1450 PDFDocument195 pagesAdau1452 1451 1450 PDFErmenegildo De La BeppaNo ratings yet
- Electronics Projects - Volume 25 PDFDocument210 pagesElectronics Projects - Volume 25 PDFSamee Ullah100% (3)
- Mc44608 Fewexternal Components Reliable and Flexible Greenline Very High Voltage PWM ControllerDocument16 pagesMc44608 Fewexternal Components Reliable and Flexible Greenline Very High Voltage PWM ControllerShamol KormokerNo ratings yet
- Clock Issues in Deep Submircron DesignDocument50 pagesClock Issues in Deep Submircron DesignRay Hua100% (1)
- ICL7135Document16 pagesICL7135JIGNESHNo ratings yet
- Nonlinearcircuits 8bit Cipher Build & BOM Vers.1: Tayda# A-1137 511-HCF4094YM013TR Tayda# A - 1339 Tayda# A - 1345Document4 pagesNonlinearcircuits 8bit Cipher Build & BOM Vers.1: Tayda# A-1137 511-HCF4094YM013TR Tayda# A - 1339 Tayda# A - 1345informagicNo ratings yet
- Synchronizing The Sg1525A PWMDocument2 pagesSynchronizing The Sg1525A PWMSandeep SNo ratings yet
- Clock Generators For SOC Processors: Printed BookDocument1 pageClock Generators For SOC Processors: Printed BookMohammad JoharNo ratings yet
- Lecture 4Document35 pagesLecture 4barajalal01No ratings yet
- Dokumen - Tips Kas 297a Maintenance Manual 006 05512 00033Document184 pagesDokumen - Tips Kas 297a Maintenance Manual 006 05512 00033plhoughtNo ratings yet