ACS1000Water Manual English
ACS1000Water Manual English
Uploaded by
sandeep_bcplCopyright:
Available Formats
ACS1000Water Manual English
ACS1000Water Manual English
Uploaded by
sandeep_bcplOriginal Description:
Copyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Copyright:
Available Formats
ACS1000Water Manual English
ACS1000Water Manual English
Uploaded by
sandeep_bcplCopyright:
Available Formats
ACS 1000
Medium Voltage AC Drives
315 to 5000 kW
400 to 6700 hp
User’s Manual
ACS 1000 Water-Cooled, 12-Pulse
3BHS102768 ZAB E01, Rev. E
Effective: 2003-04-09
ABB Switzerland Ltd. All Rights Reserved.
ABB reserves all rights to this document, also in the event of patent issue
or registration of any other industrial property protection right. Misuse, in
particular duplication and forwarding to third parties, is not permitted.
This document has been checked with due care and attention. However,
should the user find any errors, these should be reported to ABB.
ABB aims to maintain the most modern standard, therefore, entries in this
manual may differ from the actual product.
3BHS102768 ACS 1000 User’s Manual, Rev. E
Table of Contents
Chapter 1 - Safety Instructions 1-1
1.1 General 1-1
1.1.1 Intended Audience 1-1
1.1.2 Required Qualification 1-1
1.1.3 Responsibilities 1-2
1.2 Safety Labels 1-2
1.3 Safety Concept 1-3
1.4 General Safety Regulations 1-4
Chapter 2 - Introduction 2-1
2.1 Overview 2-1
2.2 Typical Application of the ACS 1000 2-1
2.3 Content of the Manual 2-2
Chapter 3 - Design and Functional Description 3-1
3.1 Functional Description 3-1
3.1.1 Converter 3-1
3.1.2 Direct Torque Control 3-3
3.2 Cabinet Layout 3-4
3.2.1 Cabinet Design 3-4
3.2.2 Cabinet Sections 3-5
3.2.3 Door Locks 3-8
3.2.4 Lifting Arrangements 3-8
3.3 Cooling System 3-8
3.3.1 Water Cooling Circuit 3-9
3.3.2 Air Cooling Circuit 3-9
3.3.3 Controlling and Monitoring Functions 3-9
3.4 Control and Monitoring Equipment 3-10
3.4.1 CDP 312 Control Panel 3-10
3.5 Standard Control and Monitoring Functions 3-11
3.5.1 General 3-11
3.5.2 Motor Control Features 3-11
3.5.3 Control Features 3-13
3.5.4 Diagnostics 3-15
3.6 Standard Protection Functions 3-16
3.6.1 Programmable Protection Functions 3-16
3.6.2 Pre-programmed Protection Functions 3-17
ACS 1000 User’s Manual, Rev. E 3BHS102768 1 (of 6)
3.7 Other Features 3-19
3.7.1 Customer Specific Options 3-19
3.7.2 PC Tools 3-19
Chapter 4 - I/O Interfaces and Application Macros 4-1
4.1 Overview 4-1
4.2 Terms and Abbreviations 4-1
4.3 Input/Output Boards 4-2
4.3.1 Standard I/O Boards 4-2
4.3.2 I/O Ratings 4-2
4.3.3 Control Voltage Output 4-3
4.3.4 Potentiometer Supply 4-3
4.3.5 Digital Output Home Position 4-3
4.3.6 Location of IOEC Boards 4-3
4.3.7 External Connections 4-4
4.3.8 Pre-defined I/O Signals 4-5
4.4 Application Macros 4-10
4.4.1 Overview 4-10
4.4.2 Factory Macro 4-11
4.4.3 Speed Macro 4-15
4.4.4 Hand/Auto Macro 4-15
4.4.5 PID Macro 4-19
4.4.6 Torque Macro 4-23
4.4.7 Sequential Macro 4-26
4.4.8 Master/Follower Macro 4-29
4.4.9 User 1 and User 2 Macro 4-34
Chapter 5 - Parameter Viewing and Editing and Control
Panel Functions 5-1
5.1 Overview 5-1
5.1.1 Safety Instructions 5-1
5.2 The CDP 312 Control Panel 5-1
5.2.1 Overview of Panel Funtions 5-2
5.2.2 Identification Mode 5-4
5.2.3 Actual Signal Display Mode 5-4
5.2.4 Parameter Mode 5-8
5.2.5 Function Mode 5-10
5.2.6 Operational Functions 5-11
5.3 Examples of Parameter Settings 5-14
5.3.1 Selection of Application Macros 5-14
5.3.2 User Macros 5-17
5.3.3 Selection of IOEC 3 and IOEC 4 5-19
5.3.4 Parameter Lock 5-20
2 (of 6) 3BHS102768 ACS 1000 User’s Manual, Rev. E
5.3.5 Restoring Default Settings 5-21
Chapter 6 - Installation 6-1
6.1 Overview 6-1
6.2 Safety Instructions 6-1
6.3 Mechanical Installation 6-2
6.3.1 Installation Site Requirements 6-2
6.3.2 Raw Water Circuit 6-4
6.3.3 Preparing the Installation Site 6-5
6.3.4 Transportation to Installation Site 6-6
6.3.5 Mechanical Door Interlock 6-6
6.3.6 Mounting the Cabinet 6-7
6.3.7 Re-aligning the Doors 6-8
6.3.8 Connecting the Raw Cooling Water 6-9
6.4 Electrical Installation 6-11
6.4.1 Selecting the Cables 6-11
6.4.2 Equipment Grounding 6-13
6.4.3 Cable Routing 6-14
6.4.4 Transformer and Motor Connection Diagrams 6-14
6.4.5 Transformer and Motor Cable Entry 6-15
6.4.6 Connecting Transformer and Motor Cables 6-17
6.4.7 Connecting Auxiliary Power Cable 6-22
6.4.8 Connecting Control Cables 6-23
Chapter 7 - Preparation for Commissioning 7-1
7.1 Overview 7-1
7.2 Check Items 7-1
7.3 Instrumentation and Protection Equipment 7-2
7.3.1 Mains Connection Scheme 7-3
7.4 Commissioning Procedure 7-4
7.4.1 Required Customer Manpower 7-4
7.4.2 Acceptance 7-4
7.4.3 Warranty 7-4
Chapter 8 - Operation 8-1
8.1 Introduction 8-1
8.2 Safety Instructions 8-1
8.3 Starting the ACS 1000 8-2
8.3.1 Checks before Start-up 8-2
8.3.2 Closing the Main Circuit Breaker 8-4
8.3.3 Charging the DC Link 8-5
ACS 1000 User’s Manual, Rev. E 3BHS102768 3 (of 6)
8.4 Entering Setpoint and Starting Up the ACS 1000 8-5
8.5 Stopping the ACS 1000 8-7
8.6 De-energizing the ACS 1000 8-8
8.7 Emergency Stop 8-9
8.7.1 Local Emergency Stop 8-10
8.8 Other Functions 8-10
Chapter 9 - Preventive Maintenance 9-1
9.1 Introduction 9-1
9.2 Safety Instructions 9-2
9.3 Maintenance Schedule 9-3
9.4 Specific Maintenance Tasks 9-4
9.4.1 Cleaning Inside 9-4
9.4.2 Checking Wire and Cable Connections 9-4
9.4.3 Replacing Batteries 9-5
9.5 Maintaining the Water Cooling System 9-7
9.5.1 Draining the Cooling System 9-7
9.5.2 Filling the Cooling Cricuit 9-8
9.5.3 Adding Water to the Cooling System 9-13
9.5.4 Changing the Ion Exchange Vessel 9-13
9.5.5 Replacing the Micro-Filter 9-15
9.5.6 Cleaning Strainer 9-16
9.5.7 Removing and Installing a Cooling Pump 9-17
9.5.8 Checking Water Conductivity 9-23
9.5.9 Checking Water Pressure 9-24
9.5.10 Checking Water Level 9-24
Chapter 10 - Trouble Shooting and Repair 10-1
10.1 Overview 10-1
10.2 Safety Instructions 10-1
10.3 Standard Procedure for Trouble-Shooting 10-3
10.4 Alarms and Faults 10-4
10.4.1 CDP 312 Control Panel 10-5
10.4.2 Types of Shut-down 10-5
10.5 Alarm and Fault Messages 10-5
Chapter 11 - Transportation, Storage, Disposal and
Recycling 11-1
11.1 Introduction 11-1
11.2 Transportation Conditions 11-1
11.3 Packing 11-1
4 (of 6) 3BHS102768 ACS 1000 User’s Manual, Rev. E
11.4 Loading and Unloading 11-3
11.5 Unpacking 11-4
11.5.1 Transportation Damages 11-6
11.6 Storage 11-6
11.6.1 Storage Conditions 11-6
11.7 Storage Instructions for Spare Parts 11-7
11.7.1 Ambient Conditions 11-7
11.8 Handling Instructions for Printed Circuit Boards 11-8
11.9 Disposal of Packing Material 11-9
11.10 Disassembly and Disposal of Equipment 11-9
Appendix A - Technical Data
Appendix B - Customer Specific Options
Appendix C - Quality Assurance
Appendix D - Applicable Codes and Standards
Appendix E - Layout and Mechanical Drawings
Appendix F - Wiring Diagrams
Appendix G - Part List and Spare Parts
Appendix H - Signal and Parameter Table
Appendix I - Inspection and Commissioning Record
Appendix K - Parameter Setting List
Appendix L - Subsupplier Data
Index
ACS 1000 User’s Manual, Rev. E 3BHS102768 5 (of 6)
6 (of 6) 3BHS102768 ACS 1000 User’s Manual, Rev. E
Chapter 1 - Safety Instructions
1.1 General
This chapter includes the safety instructions that must be complied with
when installing, operating and servicing the ACS 1000. The contents of
this chapter must therefore be read carefully before attempting any work
on, or with the unit.
1.1.1 Intended Audience
The ACS 1000 User’s Manual is intended for the following three target
groups:
• Installation personnel
• Operators
• Maintenance personnel.
This manual is not intended for commissioning staff.
Installation The installation personnel is mainly responsible for:
• Preparing the mounting site
• Installing the ACS 1000 (transportation to the mounting site by crane,
forklift, etc., unpacking)
• Connecting cables (high and medium voltage cables as well as con-
trol cables)
• Preparing the cooling unit (initial filling of the main cooling circuit,
checking of the valves, etc.)
• Final check according to the checklist in Chapter 7 - Preparation for
Commissioning.
Operation The operator is mainly responsible for the operation of the ACS 1000
(starting and stopping the drive) using the control panel or a supervisory
control system.
Maintenance The maintenance personnel is mainly responsible for:
• Periodical checks of the ACS 1000
• Simple maintenance tasks.
1.1.2 Required Qualification
Personnel involved in installation and maintenance work on the ACS 1000
must be qualified and fully acquainted with medium voltage equipment.
ACS 1000 User’s Manual, Rev. E 3BHS102768 1-1 (of 6)
Chapter 1 - Safety Instructions
Operating the drive does not require special knowledge of frequency
converter technology. However, the operator must know how to operate
the ACS 1000 and must understand the meaning of the messages on the
control panel to decide on the appropriate actions to take.
Neither installation and maintenance personnel nor operators are
expected to have prior experience of:
• ABB products
• Frequency converters
• The ACS 1000 product family
• Installing, commissioning, operating and servicing the ACS 1000.
1.1.3 Responsibilities
It is the owners responsibility to ensure that each person involved in the
installation, operation or maintenance of the ACS 1000 has received the
appropriate training or instructions and has thoroughly read and clearly
understood the safety instructions in this chapter.
Personnel involved in installing and servicing the ACS 1000 must observe
the relevant safety regulations and standards and the instructions given in
this manual.
1.2 Safety Labels
The safety instructions always appear at the beginning of each chapter
and/or precede any instruction in the context where a potentially
dangerous situation may appear. The safety instructions are divided into
four categories and emphasized by the use of the following safety signs
on the left side of the page:
Danger: This symbol indicates an imminent danger resulting from
mechanical forces or high voltage. A non-observance leads to life-threat-
ening physical injury or death.
Warning: This symbol indicates a dangerous situation. A non-observance
may lead to bad or life-threatening physical injury or cause serious
damage to the converter.
Caution: This symbol indicates a dangerous situation. A non-observance
! may lead to physical injury or cause damage to the converter.
1-2 (of 6) 3BHS102768 ACS 1000 User’s Manual, Rev. E
Chapter 1 - Safety Instructions
Note: This symbol emphasizes important information. A non-observance
may cause damage to the converter.
1.3 Safety Concept
The design and the specific safety features of the ACS 1000 allow safe
installation, operation and maintenance of the equipment. The ACS 1000
is equipped with the following safety features:
• Safety grounding isolator
• Electromechanical interlocking system; the safety grounding isolator
cannot be closed until the main circuit breaker is open and the DC link
capacitor is discharged down to a safe level.
• The doors of the medium voltage section cannot be opened as long
as the gounding isolator is not closed. Only the doors of the control
section can be opened during operation.
• Protection functions to prevent dangerous operating conditions and
damage to the converter.
• Protection functions for transformer, motor and other external equip-
ment.
Although the ACS 1000 is safe if all protection functions are operating,
some residual danger areas remain, if safety instructions are not
observed.
The ACS 1000 operates in a medium voltage environment usually
consisting of switch gear, power transformer, motor, cabling, driven
process and supervisory control system.
No threat arises from the interaction of these external components with the
ACS 1000. However, the safety concept for these and the overall process
are not part of the ACS 1000 safety concept.
ACS 1000 User’s Manual, Rev. E 3BHS102768 1-3 (of 6)
Chapter 1 - Safety Instructions
Never remove rear
Even after pressing EMERGENCY STOP cover when
the converter will not be de-energized converter is energized
immediately. Discharging will take or before grounding
about 5 minutes. Do not attempt isolator is closed
to close the grounding isolator
by force or to open the
converter doors earlier
Fan is coasting
Control section: down after
Danger from auxiliary shut-down
and external signal
voltages when front
door is open
Do not attempt The water cooling
to open doors system may start
Hot equipment in by force when automatically even
converter section drive is ener- if the converter is
gized or before de-energized.
Foreign voltages inside the grounding
cabinets due to self-excitation isolator is
if motor not disconnected closed
Figure 1-1 Residual Danger Areas of the ACS 1000
1.4 General Safety Regulations
The safety instructions in this chapter generally apply when working on
the ACS 1000. You will find additional instructions and warnings related to
particular topics or actions throughout the manual where relevant.
The following regulations must be strictly observed:
• Typical application of the ACS 1000
The technical specifications (Appendix A - Technical Data) and the
typical application of the ACS 1000 (Chapter 2 - Introduction) must be
strictly adhered to.
• Training of personnel
Only trained personnel are allowed to install, operate, maintain or ser-
vice the ACS 1000. This personnel must be specially instructed and
informed about the residual danger areas.
1-4 (of 6) 3BHS102768 ACS 1000 User’s Manual, Rev. E
Chapter 1 - Safety Instructions
• Modifications without authority
Modifications and constructional changes in the ACS 1000 are not al-
lowed.
• Duty of maintenance
The owner must ensure that the ACS 1000 is used only under proper
conditions and in a fully serviceable state.
• Operating environment
The owner must guarantee that all ambient conditions specified in Ap-
pendix A - Technical Data are fulfilled.
Danger: The ACS 1000 is a high voltage device.
When located, installed and connected in accordance with the instructions
given in this manual, the device is safe.
When misused it can lead to life-threatening physical injury or death.
Keep strictly to the instructions given in this manual.
Danger: High Voltage!
Do not access the ACS 1000 or work on the motor or the power cables, if
the drive system is energized and not properly grounded!
After switching off the mains and after the motor has come to a stop, wait
approximately 5 minutes for the DC link capacitors to discharge. The light
GND.- ISOLATOR UNLOCKED must be on, before grounding the
ACS 1000.
Danger: Some loads can cause the motor to rotate!
Always disconnect, short-circuit or block the motor before work is started.
Danger: Dangerous voltages from external control circuits may be present
inside the ACS 1000, even if mains and auxiliary power are shut off.
Take appropriate measures when working on the ACS 1000, i.e deener-
gize and disconnect all external devices before work is started.
ACS 1000 User’s Manual, Rev. E 3BHS102768 1-5 (of 6)
Chapter 1 - Safety Instructions
Danger: This converter can influence the functioning of heart pace-
makers.
Install a corresponding warning sign at the entrance to the converter room.
In case the ACS 1000 is located in an open hall, the safety sign must be
at a minimum distance of 6 meters / 20 feet to the converter!
1-6 (of 6) 3BHS102768 ACS 1000 User’s Manual, Rev. E
Chapter 2 - Introduction
2.1 Overview
This manual provides detailed information on the installation and start-up
of the ACS 1000 frequency converter, including detailed descriptions of
the functions of the unit. Fault tracing information, technical data, dimen-
sional drawings and glossary are included as well.
2.2 Typical Application of the ACS 1000
The ACS 1000 is a standard, medium-voltage AC drive, rated according
to the technical specifications in Appendix A - Technical Data.
The ACS 1000 has been designed as a converter drive for squirrel cage
induction motors. Thanks to its features the ACS 1000 is ideally suited for
retrofit applications. Standard applications are the control of fans, pumps,
conveyors and compressors in petrochemical, mining, water, pulp &
paper, cement industries and power generation.
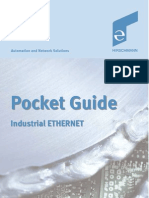
Figure 2-1 The ACS 1000, Water-Cooled Type
ACS 1000 User’s Manual, Rev. E 3BHS102768 2-1 (of 4)
Chapter 2 - Introduction
2.3 Content of the Manual
Chapter 1 - Safety Instructions: In this chapter, the various safety instruc-
tion levels used in this manual are explained. This chapter also provides
general instructions on safety.
Chapter 3 - Design and Functional Description contains a short technical
overview of the ACS 1000 and a short description of its features and
control functions.
Chapter 4 - I/O Interfaces and Application Macros describes Standard I/O,
control configuration using application macros (Factory, Speed, Hand/
Auto, PID Control, Torque Control, Sequential Control, Master/Follower)
together with the macro-specific I/Os and indicates typical applications for
each macro.
Chapter 5 - Parameter Viewing and Editing and Control Panel Functions
describes the functions of the CDP 312 control panel and offers instruc-
tions for setting parameters, calling up and displaying actual values and
messages and entering start and stop commands and setpoint values.
Chapter 6 - Installation specifies the mechanical and electrical require-
ments to the foundation, cabling, cooling system and other equipment,
gives instructions for mounting (drawings and descriptions), cable routing
and termination for power, auxiliary and signal connections (incl. EMC
requirements).
Chapter 7 - Preparation for Commissioning includes an installation check-
list and describes the preparatory steps to commissioning.
Chapter 8 - Operation outlines the regular operation using the CDP 312
control panel and the pushbuttons on the control section after the
ACS 1000 has been properly installed and commissioned.
Chapter 9 - Preventive Maintenance contains the maintenance schedule
and step by step instructions of specific maintenance tasks.
Chapter 10 - Trouble Shooting and Repair explains what to do upon an
alarm message and how to proceed in case of an alarm or a converter trip.
A list of alarm and fault messages on the CDP 312 control panel as well
as explanations are included.
Chapter 11 - Transportation, Storage, Disposal and Recycling provides
information about environmental conditions to be maintained during trans-
portation and storage, together with instructions for packing, unpacking,
lifting and moving. It includes special requirements for storage and conser-
vation. In addition, information on disposal and recycling of material as
well as on temporary shut-down and decommissioning of the ACS 1000 is
given.
2-2 (of 4) 3BHS102768 ACS 1000 User’s Manual, Rev. E
Chapter 2 - Introduction
Appendix A - Technical Data lists the ACS 1000 technical specifications.
Appendix B - Customer Specific Options is a documentation of all
customer specific options including descriptions and drawings.
Appendix C - Quality Assurance contains quality certificates and confor-
mity declarations.
Appendix D - Applicable Codes and Standards is a list of all applicable
codes and standards for the ACS 1000.
Appendix E - Layout and Mechanical Drawings is a collection of mechan-
ical outline drawings showing all relevant information for floor mounting,
cable entries, water connections etc.
Appendix F - Wiring Diagrams is a collection of electrical schematics and
terminal diagrams.
Appendix G - Part List and Spare Parts is a list of all main components.
Appendix H - Signal and Parameter Table includes a complete description
of all control parameters.
Appendix I - Inspection and Commissioning Record contains the factory
test report. Commissioning test reports and a provisional acceptance
certificate will be included in this Appendix.
Appendix K - Parameter Setting List is a customer specific parameter list
with all parameter settings after commissioning.
Appendix L - Subsupplier Data includes maintenance instructions, data
sheets and other information for equipment supplied by third parties.
The Index contains an alphabetical list of topics treated in this manual with
reference to the corresponding page numbers.
ACS 1000 User’s Manual, Rev. E 3BHS102768 2-3 (of 4)
Chapter 2 - Introduction
2-4 (of 4) 3BHS102768 ACS 1000 User’s Manual, Rev. E
Chapter 3 - Design and Functional Description
3.1 Functional Description
3.1.1 Converter
Overview The ACS 1000 is a medium voltage frequency converter for three phase
squirrel cage induction motors. Sophisticated microprocessor circuitry is
used for monitoring the motor electromagnetic status. These data and
Direct Torque Control enable state-of-the-art sensorless motor control.
The nearly sinusoidal converter output voltage makes the ACS 1000
ideally suitable for retrofit applications with existing standard induction
motors without the need for derating.
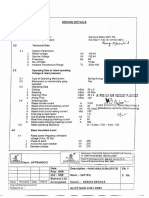
Input Circuit The ACS 1000 is equipped with a 12-pulse diode rectifier bridge (see
Figure 3-1) which is adequate for most supplying networks and the
harmonic requirements as demanded by standards such as IEEE 519.
The 3-phase AC line voltage is supplied to the rectifier bridges through the
3-winding converter transformer (see Figure 3-1). In order to obtain 12
pulse rectification, a 30° phase shift is necessary between the two
secondary windings of the transformer. Therefore one secondary is wye-
connected and the other is delta-connected.
The two fuseless rectifier bridges are connected in series, such, that the
DC voltages are added up. Therefore, the full DC bus current flows
through both bridges.
(Option)
NP M
Main circuit
breaker Converter
transformer
Diode Protection DC Link Three level Sine filter Squirrel cage
rectifier IGCTs inverter induction motor
Figure 3-1 Elementary Diagram
ACS 1000 User’s Manual, Rev. E 3BHS102768 3-1 (of 20)
Chapter 3 - Design and Functional Description
Fuseless Design The ACS 1000 features a patented design using the IGCT power semi-
conductor switching device for circuit protection instead of conventional
fuses.
The IGCT, which is placed between the DC link and the rectifier, can
directly isolate the inverter from the power supply side within
25 microseconds, making it 1000 times faster than the operational perfor-
mance of fuses.
The precharge resistors limit the current in the DC link when the converter
is energized. They are bypassed with the protection IGCTs as soon the DC
voltage reaches 79%. The main function of these protection IGCTs is to
open in case of a fault in order to prevent the rectifier to feed into the fault.
Common mode currents from the inverter can be limited with the optional
common mode choke (not shown in Figure 3-1) and damped with the
common mode damping resistor, if the transformer secondary cables
exceed a certain length (for details see Appendix A - Technical Data). The
common mode choke provides full reactance for the common mode
currents flowing through transformer secondary cables, DC link, output
filter and internal grounding bus of the converter. For the main DC current,
the choke forms practically no reactance thus enabling the main current to
pass unhindered.
Inverter Di/dt-chokes (not shown in Figure 3-1) are used in the inverter to protect
the inverter’s free wheeling diodes from excessive rates of current drop
during commutation.
Each leg of the 3-phase inverter bridge consists of a combination of 2
IGCTs for 3-level switching operation: the output is switched between
positive DC voltage, neutral point (NP) and negative DC voltage. Hence,
both the output voltage and the frequency can be controlled continuously
from zero to maximum, using Direct Torque Control.
Output Circuit At the converter output a LC sine filter with low pass charakteristic is used
for reducing the harmonic content of the output voltage. Current feedback
is used to actively control filter operation. The low pass frequency is
designed to be well below the lowest switching frequency used by the
inverter output stage. This greatly enhances the purity of both the voltage
and the current waveforms applied to the motor. With this filter, the voltage
waveform applied to the motor is nearly sinusoidal (see Figure 3-2). There-
fore, standard motors can be used at their nominal ratings. The filter also
eliminates all high dv/dt effects and thus voltage reflections in the motor
cables and stresses to the motor insulation are totally eliminated. Motor
bearing failures attributable to capacitively coupled high frequency current
are no longer an issue (the causal high frequency common mode voltage
is eliminated).
3-2 (of 20) 3BHS102768 ACS 1000 User’s Manual, Rev. E
Chapter 3 - Design and Functional Description
Output voltage: 4.16 kV
Output frequency: 60 Hz
Figure 3-2 Voltage and Current Waveforms at Converter Output
Control Equipment The control equipment is an integral part of the drive cabinet and provides
microprocessor based drive control and monitoring functions, supple-
mented with hardware and software protection features to safeguard
against faults and damages due to improper operating conditions and
equipment malfunction.
Technical Data See Appendix A - Technical Data.
Applicable Codes and See Appendix D - Applicable Codes and Standards.
Standards
3.1.2 Direct Torque Control
Direct torque control (DTC) is a unique motor control method for AC
Drives. The inverter switching is directly controlled according to the motor
core variables flux and torque.
The measured motor current and DC link voltage are inputs to an adaptive
motor model which produces exact actual values of torque and flux every
25 microseconds. Motor torque and flux comparators compare actual
values with the reference values produced by the torque and flux
reference controllers. Depending on the outputs from the hysteresis
controllers, the pulse selector directly determines the optimum inverter
switch positions.
Typical performance figures for speed and torque control are given in
section Standard Control and Monitoring Functions, page 3-11.
ACS 1000 User’s Manual, Rev. E 3BHS102768 3-3 (of 20)
Chapter 3 - Design and Functional Description
Mains
Rectifier
Speed controller +
acceleration compensator
Internal torque Torque Control Switch position
reference status signals commands
Torque DC bus
Torque Torque reference Optimum
comparator
reference controller pulse
Flux selector
Speed comparator
=
PID
reference Flux ~
Inverter
Actual torque status
ASIC
Flux Actual flux Switch
reference positions
controller
U Adaptive
U
f motor model
T f
Internal flux Output
f reference filter
Actual speed
DC bus voltage
Inverter current (4 measurements)
Filter current M
(3 measurements)
3~
Figure 3-3 DTC Block Diagram
.
3.2 Cabinet Layout
3.2.1 Cabinet Design
The riveted cabinet construction of the ACS 1000 provides extremely
effective protection against electromagnetic emissions and fulfills the
requirements of international standards like UL 347A.
The ACS 1000 cabinet system provides the flexibility to add additional
cabinets at any time. Cabinets can be added in widths of 600, 800 and
1000 mm (24, 32 and 39 Inches).
3-4 (of 20) 3BHS102768 ACS 1000 User’s Manual, Rev. E
Chapter 3 - Design and Functional Description
3.2.2 Cabinet Sections
5 Cooling
section
4 Converter section
2/3 Filter and DC
components section
1 Control
section
Figure 3-4 ACS 1000, Water-Cooled Type
1 The Control Section includes the control equipment. The CDP 312
control panel is mounted on the front door. Pushbuttons for closing
and opening the main circuit breaker, an emergency-off pushbutton
and a light, indicating when the DC link is discharged, are installed
below the control panel. All other control equipment (electronics pow-
er supply, microprocessor board, internal communcation boards, mo-
tor protection switches, miniature circuit breakers) is mounted on a
swing frame. The customer I/Os are located on the wall to right of the
swing frame. Terminals for customer control and protection signals
and auxiliary power supply are also located there. See Figure 3-5 and
Figure 3-6 for details.
Behind the swing frame and a protective separation door is the drive’s
power terminal section with busbars for mains and motor cables. To
provide adequate access to this section, the swing frame can be
opened more than 90°.
2 The Filter and DC Components Section includes the grounding
switch, the filter reactor and the filter capacitors, the DC link capaci-
tors and the optional common mode choke.
3 see 2
4 Converter Section. The rectifier stack, the protection IGCTs and the
inverter stacks are mounted on a swing frame.
5 Cooling Section. All components of the cooling unit (pump, heat
exchangers, expansion tank and water treatment circuit, raw water
inlet and outlet connectors) are mounted on a metal frame which is
fastened to the main converter cabinet.
ACS 1000 User’s Manual, Rev. E 3BHS102768 3-5 (of 20)
Chapter 3 - Design and Functional Description
Drive control Output filter
swing frame capacitors Cf
Electronic power Gate unit power
supply (EPS) board supply (GUSP)
AMC3 control board Common mode
damping resistor Rcom
Interface board
IOEC1 board Inverter stacks
Power terminals
Protection IGCTs
IOEC2 board
ADCVI board
Current transformers
Clamp
resistors Rs
Batteries Ion exchange vessel
Motor starters and DC link Air-to-water heat
circuit breakers capacitor Cf exchanger
Aux. supply Filter reactor Lf Expansion vessel
transformer
Outlet for Ground isolator Rectifier stacks
cooling air supply Snubber
IOEC3 board capacitor Cr
IOEC4 board Common mode
(optional) choke Lcom
Figure 3-5 Front View
3-6 (of 20) 3BHS102768 ACS 1000 User’s Manual, Rev. E
Chapter 3 - Design and Functional Description
Cooling fan
Water-to-water heat exchanger
di/dt-chokes Ls
Inverter stacks
Output filter
capacitors Cf
Power terminals
Rectifier snubber
Main cooling pipe (feed) Cm, Fm (Varistor)
Main cooling pipe (return)
Rectifier snubber
Air-to-water heat exchanger and DC circuit
resistor set
Cooling pump 1
Cooling pump 2 (optional)
Figure 3-6 Rear View
ACS 1000 User’s Manual, Rev. E 3BHS102768 3-7 (of 20)
Chapter 3 - Design and Functional Description
3.2.3 Door Locks
All doors are hinged and locked using carriage key locks.
The doors of the power sections of the drive are electromechanically inter-
locked with a safety grounding switch and with the main circuit breaker
upstream of the converter transformer. The interlocking system insures
that none of the power cabinets can be opened until the main circuit
breaker is opened, the DC link capacitors are discharged and the safety
grounding switch is closed. Additionally, the same interlocking system
ensures that power cannot be initialized to the drive unless the doors are
closed and the safety grounding switch is opened.
The doors of the control section and the cooling section are not linked to
the interlocking system.
3.2.4 Lifting Arrangements
The cabinets are fitted with lifting lugs as standard.
3.3 Cooling System
The cooling sytem consists of a water cooling circuit (Figure 3-7 a) and an
air cooling circuit (Figure 3-7 b). The main power components such as
rectifier, inverter, protection IGCTs, common mode and output filter reac-
tors are water-cooled. Filter capacitors, control section and other ancillary
components are air-cooled. The cooling unit is mounted in the cooling
section and is accessible while the ACS 1000 is running.
a) Water Cooling Circuit
Control Filter and dc Converter Cooling
section components section section
section
b) Air Cooling Circuit
Figure 3-7 Coolant Flow
3-8 (of 20) 3BHS102768 ACS 1000 User’s Manual, Rev. E
Chapter 3 - Design and Functional Description
3.3.1 Water Cooling Circuit
The water cooling system consists of three circuits:
• The main circuit containing de-ionized water that transfers the heat
losses from the water-cooled components to a water-to-water heat
exchanger
• The water treatment circuit that continuously purifies the cooling
water of the main circuit
• The raw water circuit that transfers the heat losses from the water-to-
water heat exchanger to the exterior.
For more information please see Appendix L - Subsupplier Data.
Main Cooling Circuit A centrifugal pump (a 2nd pump can be ordered optionally) circulates the
cooling water in the main circuit to the components to be cooled and back
to the water-to-water heat exchanger. The main cooling circuit is filled and
topped up through the make-up water valve which is part of the water
treatment circuit.
See Chapter 9 - Preventive Maintenance, Filling the Cooling Circuit, page
9-8 for the cooling water specification.
Water Treatment A portion of the main cooling water flow is directed through the water treat-
Circuit ment circuit equipped with ion exchanger, fine mechanical filter, air
removal facilities and expansion tank for maintaining constant static pres-
sure and providing storage volume for service water.
Raw Water Circuit The external raw water circuit is connected to the water-to-water heat
exchanger. Included in the circuit is a mechanical filter and a motor oper-
ated valve. The valve is opened or closed depending on the required
cooling capacity. A portion of the raw water is directed to an air-to-water-
cooler of the air cooling system.
See Chapter 6 - Installation, Raw Water Circuit, page 6-4 for the raw water
specification.
3.3.2 Air Cooling Circuit
The cooling air circulates in a closed circuit (see Figure 3-7 b). A fan (a
redundant fan can be ordered as an option) blows the hot air through the
air-to-water cooler into the lower area of the converter. The air passes
through the inverter and rectifier stacks, the filter and dc components
section. A portion of the air flow is directed to the control section. The hot
air rises to the upper area of the cabinet and flows back to the fan.
3.3.3 Controlling and Monitoring Functions
The cooling system is controlled and monitored by the ACS 1000. Water
conductivity, temperature and pressure of the cooling water in the main
cooling circuit and the level in the expansion tank are monitored. Cooling
pump and fan are switched on automatically. If the ACS 1000 is shut down
and the MCB is opened, pump and fan are switched off with a delay. The
ACS 1000 User’s Manual, Rev. E 3BHS102768 3-9 (of 20)
Chapter 3 - Design and Functional Description
motor valve in the raw water circuit is closed or opened depending on the
temperature of the main cooling circuit.
If the ACS 1000 is stopped (the main circuit breaker is open, the auxiliary
voltage is switched on) the water conductivity increases after some time.
If the conductivity alarm level is reached, the pump is started automatically
to circulate the cooling water through the water treatment circuit.
.
3.4 Control and Monitoring Equipment
The ACS 1000 can be controlled from several control locations:
• The detachable CDP 312 Control Panel mounted on the ACS 1000
front door of the control section
• External control stations, e.g. supervisory control system, connected
to the analog and digital I/O terminals on the I/O boards
• Supervisory control system communicating through Fieldbus adapter
modules
• PC Tools (DriveWindow), connected via a PC adapter to the
ACS 1000.
Optional analog and digital I/O boards can be used to provide extended
transformer and motor protection, protection for external cooling equip-
ment (e.g. fans, chillers), on-line synchronization logic, and other
customer requirements.
3.4.1 CDP 312 Control Panel
The detachable control panel on the front door of the control section is the
basic local user interface for:
• Viewing and setting parameters
• Monitoring the operation of the ACS 1000
• Entering start and stop commands
• Setting the reference value
• Troubleshooting.
For further details see Chapter 5 - Parameter Viewing and Editing and
Control Panel Functions.
3-10 (of 20) 3BHS102768 ACS 1000 User’s Manual, Rev. E
Chapter 3 - Design and Functional Description
3.5 Standard Control and Monitoring Functions
3.5.1 General
This chapter provides information about the standard control, monitoring
and protection functions. For detailed information on parameter settings
for individual functions see Appendix H - Signal and Parameter Table.
The ACS 1000 is configured and customized by means of application
parameters. These parameters can be altered by the user, either using the
integrated CDP 312 control panel or a PC with the DriveWindow software
tool (see PC Tools, page 3-19).
Control and monitoring functions of the ACS 1000 can be activated by
setting parameters one by one or by invoking an application macro which
is optimized for a particular application. Therefore some of the functions
described in this chapter will be configured automatically if an application
macro is selected.
A description of the I/O boards and the application macros of the
ACS 1000 can be found in Chapter 4 - I/O Interfaces and Application
Macros.
3.5.2 Motor Control Features
Acceleration and The ACS 1000 provides two user-selectable acceleration and decelera-
Deceleration Ramps tion ramps. It is possible to adjust the acceleration/deceleration times
(0..1800 s) and select the ramp shape. Switching between the two ramps
can be controlled via a digital input.
The available ramp shape alternatives are:
Linear: Suitable for drives requiring long acceleration/deceleration where
S-curve ramping is not required.
S1: Suitable for short acc./dec. times. Motor
speed
S2: Suitable for medium acc./dec. times.
S1
S3: Suitable for long acc./dec. times. Linear
S-curve ramps are ideal for conveyors
carrying fragile loads, or other applica- S2
tions where a smooth transition is S3
required when changing from one speed
to another.
1 1.25 2 t (s)
Accurate Speed The static speed control error is typically +0.1% (10 % of nominal slip) of
Control the motor nominal speed, which satisfies most industrial applications.
ACS 1000 User’s Manual, Rev. E 3BHS102768 3-11 (of 20)
Chapter 3 - Design and Functional Description
Accurate Torque The ACS 1000 performs precise T (%)
TN
Control without Speed torque control without any speed feed-
Tref
Feedback back from the motor shaft. The torque 100
rise time is less than 10 ms at 100% Tact
90
torque reference step, compared to
over 100 milliseconds in frequency
converters using sensorless flux
vector control.
By applying a torque reference instead
of a speed reference, the ACS 1000
will maintain a specific motor torque 10
value; the speed will adjust automati- t(s)
< 10 ms
cally to maintain the required torque. TN = rated motor torque
Tref = torque reference
Tact = actual torque
Table 3-1 Typical Performance Figures with Direct Torque Control
ACS 1000 ACS 1000
Torque Control
no Pulse Encoder with Pulse Encoder
Linearity error + 4 %* +3%
Torque rise time < 10 ms < 10 ms
* When operated around zero frequency, the error may be bigger.
Auxiliary Ride Through The auxiliary ride through function guarantees correct fault indication and
proper trip sequencing in the event that the auxiliary power source feeding
the drive is lost. The function is activated by a parameter. During ride
through the power for the control circuits of the ACS 1000 is supplied by
internal batteries. The ride through time is limited to 1 sec.
Constant Speeds Up to 15 constant speeds can be programmed and selected by digital
inputs. If activated the external speed reference is overwritten. If the
Sequential Control Macro is used, a standard set of parameter values is
selected automatically.
Critical Speed The critical speed function is available for applications where certain motor
speeds or speed bands have to be avoided, for example, due to mechan-
ical resonance problems. Five different speeds or speed bands can be set.
3-12 (of 20) 3BHS102768 ACS 1000 User’s Manual, Rev. E
Chapter 3 - Design and Functional Description
Each critical speed setting allows the Motor
speed
user to define a low and a high speed (rpm)
limit. If the speed reference signal 1560
requires the ACS 1000 to operate
1380
within this speed range the Critical
Speeds function will keep the
ACS 1000 operating at the low (or 690
high) limit until the reference is out of 540
the critical speed range. The motor is Speed
reference
accelerted/decelerated through the (rpm)
critical speed band according to the s1 Low s1 High s2 Low s2 High
acceleration or deceleration ramp. 540 690 1380 1560
Enhanced Flying Start This feature allows a rotating motor (e.g. a turbo-pump or a fan) to be
taken over by the ACS 1000. By means of the flying start function the
frequency of the motor is detected and the motor is started-up again by the
ACS 1000.
Flux Optimization Flux optimization of the ACS 1000 reduces the total energy consumption
and motor noise level when the drive operates below the nominal load.
The total efficiency (ACS 1000 and motor) can be improved by 1...10%,
depending on the load torque and speed.
Full Torque at Zero A motor fed by the ACS 1000 can develop short-term motor nominal
Speed torque at start-up without any pulse encoder or tachogenerator feedback.
This feature is essential for constant torque applications. However, for
long-term operation at zero speed a pulse encoder is required.
Motor ID Calculation Based on the nameplate data, all ACS 1000 internal motor control param-
eters will be automatically calculated. This procedure is usually performed
once during commissioning. However, the procedure can be repeated
whenever required (e.g. when the ACS 1000 will be hooked up to another
motor).
Power Loss Ride- If the incoming supply voltage is cut off, the ACS 1000 will continue to
Through operate in an active but non-torque producing mode by utilizing the kinetic
energy of the rotating motor and load. The ACS 1000 will be fully active as
long as the motor rotates and generates energy to the ACS 1000.
Speed Controller The speed controller has to be tuned during commissioning according to
Tuning the process requirements. It is possible to manually adjust the factory
default settings of all speed controller relevant parameters.
3.5.3 Control Features
Automatic Restart The ACS 1000 can automatically reset itself after an undervoltage has
occurred.
If the automatic restart feature is activated and an undervoltage condition
occurs in the DC link, the programmable waiting time is started. If the
voltage recovers within the selected time, the fault will be reset automati-
ACS 1000 User’s Manual, Rev. E 3BHS102768 3-13 (of 20)
Chapter 3 - Design and Functional Description
cally and the converter resumes normal operation. If the waiting time has
elapsed and the voltage has not recovered, the converter is shut down.
Built-in PID Controller The software based PID Controller can be used to control process vari-
ables such as pressure, flow, or fluid level.
For details see Chapter 4 - I/O Interfaces and Application Macros, PID
Macro, page 4-19 .
External Control The ACS 1000 provides a control signal interface for two separate
Stations external control stations (EXT1 and EXT2). The active control station can
be changed via a digital input.
The control panel always overrides the other control signal sources when
switched to local mode.
For more information see Chapter 4 - I/O Interfaces and Application
Macros.
Local and Remote The ACS 1000 can receive operational commands via the control panel
Control and the pushbuttons on the front door or via remote control stations. The
local or remote control location is selected via the LOC/REM key on the
control panel. For details see Chapter 5 - Parameter Viewing and Editing
and Control Panel Functions.
Main Circuit Breaker All functions regarding the control of the main circuit breaker (opening,
Control closing, tripping, monitoring of feedback signals) are included in the
ACS 1000. Opening and closing commands can be given using the push-
buttons on the control section or they can be entered via external control
stations.
Parameter Lock The user can prevent unwanted parameter changes by activating the
Parameter Lock function.
Programmable Analog The analog outputs on each IOEC board are programmable.
Outputs
Depending on the setting of the corresponding parameters, the analog
output signals can represent for example:
• motor speed, process speed (scaled motor speed), output frequency,
output current, motor torque, motor power, DC bus voltage, output
voltage, application block output (process PID controller output),
active reference, reference deviation (difference between the
reference and the actual value of the process PID controller).
The selected analog output signals can be inverted and filtered. The
minimum signal level can be set to 0 mA, 4 mA or 10 mA.
Programmable Digital Four digital outputs on the IOEC 2 board can be programmed individually.
Outputs Each output has floating change-over contacts and can be allocated to an
internal binary control or status signal via parameter setting.
If the optional boards IOEC 3 and/or IOEC 4 are installed, a maximum of
12 additional digital outputs (6 on each board) are available.
3-14 (of 20) 3BHS102768 ACS 1000 User’s Manual, Rev. E
Chapter 3 - Design and Functional Description
Reference Signal The ACS 1000 offers several functions for processing the speed reference
Processing value.
• The reference value can be changed via two digital inputs: One
digital input increases the speed, the other decreases it. The active
reference is memorized in the control system.
• The ACS 1000 can form a reference out of two analog input signals
by using mathematical functions: Addition, Subtraction, Multiplica-
tion, Minimum selection, and Maximum selection.
If pre-defined constant speeds are selected, the actual speed reference is
overwritten (see also Constant Speeds, page 3-12).
The external reference can be scaled in such a way, that the signal
minimum and maximum values correspond to a speed other than the
nominal minimum and maximum speed limits.
Scalable Analog Inputs Each analog input can be adapted individually to the type and range of the
connected input signal:
• Signal type: voltage or current (selectable by DIP switches)
• Signal inversion: if a signal is inverted, the maximum input level corre-
sponds to the minimum signal value and vice versa
• Minimum level: 0 mA (0 V), 4 mA (2 V) or by input tuning function
(actual input value is read and set as minimum)
• Maximum level: 20 mA (10 V) or by input tuning function (actual input
value is read and set as maximum)
• Signal filtering time constant: adjustable between 0.01..10 s.
The offset of the analog inputs can be calibrated automatically or
manually.
3.5.4 Diagnostics
ACS 1000 Information The software version and the serial number of the ACS 1000 can be
displayed on the CDP 312 control panel.
Actual Signal Actual Signals are shown in parameter groups 1..5. The most significant
Monitoring ones are:
• ACS 1000 output frequency, current, voltage and power
• Motor speed and torque
• DC Link voltage
• Active control location (Local / External 1 / External 2)
• Reference values
• ACS 1000 inverter air temperature
• Operating time counter (h), kWh counter
• Digital I/O and analog I/O status
ACS 1000 User’s Manual, Rev. E 3BHS102768 3-15 (of 20)
Chapter 3 - Design and Functional Description
• PID controller actual values (if the PID Control Macro is selected).
For details on actual signals to be displayed see Chapter 5 - Parameter
Viewing and Editing and Control Panel Functions.
Fault History The Fault History contains information on the forty most recent faults
detected by the ACS 1000. Faults are displayed as text. For further details
see Chapter 5 - Parameter Viewing and Editing and Control Panel Func-
tions.
.
3.6 Standard Protection Functions
For detailed information on parameter settings for individual functions see
Appendix H - Signal and Parameter Table.
3.6.1 Programmable Protection Functions
External Emergency The normally closed contacts of external emergency-off buttons can be
Off wired into the tripping loop.
External Motor An external motor protection relay can be connected to a pre-defined input
Protection of the ACS 1000. The input is integrated into the tripping loop by a
normally closed contact.
External Transformer An external transformer protection relay can be connected to a pre-
Protection defined input of the ACS 1000. The input is integrated into the tripping loop
by a normally closed contact.
Line Unbalance A signal from a line unbalance protection relay can be monitored by wiring
Protection it into the tripping loop of the ACS 1000. If the signal is low the main circuit
breaker is tripped immediately.
Monitoring of Limit The values of several user selectable signals can be monitored for adjust-
Values able low and high limits.
The digital status of the active limit appears on the control panel display
and can also be allocated to a digital output.
Motor Stall The ACS 1000 protects the motor if a stall condition is detected. The stall
function can be enabled or disabled, the monitoring limits for stall
frequency (speed) and stall time can be set and the drive reaction on a
stall condition can be selected: alarm or shutdown.
Motor Winding The motor can be protected from overheating by activating the motor
Temperature winding temperature monitoring function.
The ACS 1000 standard solution offers three analog inputs for measuring
and monitoring the motor winding temperature.
Values for alarm and trip levels can be set.
3-16 (of 20) 3BHS102768 ACS 1000 User’s Manual, Rev. E
Chapter 3 - Design and Functional Description
Overspeed Motor speed as determined by DTC is monitored. If motor speed exceeds
the maximum permitted motor speed (user adjustable) a trip is initiated. In
addition, an input for connection of an external motor overspeed trip is
available. A converter trip is also initiated if the external motor overspeed
trip is activated (signal active when low).
Process Stop A process stop button or relay can be connected to a pre-defined input of
the ACS 1000. The actual process stop input must be closed during
normal operation. If the digital input opens, the drive control initiates a stop
command. The stop mode (ramp stop, stop at torque limit, or coast stop)
can be selected by a parameter. When the drive is stopped the main circuit
breaker is opened.
Underload Loss of motor load may indicate a process malfunction. ACS 1000
provides an underload function to protect the machinery and process in
such a serious fault condition. This monitoring function checks whether
the motor load is above the specified load curve. 5 different load curves
can be selected by the customer.
Undervoltage In order to detect a loss of the mains supply, the levels of the positive and
negative DC link voltage levels are monitored. If these voltage levels drop
below 70% of their nominal levels an undervoltage alarm is initiated and
power loss ride through is activated (provided it is selected). If the DC link
voltage levels drop below 65% of their nominal levels an undervoltage trip
is initiated.
3.6.2 Pre-programmed Protection Functions
Battery Test The back-up batteries are checked periodically by applying a known load
and by measuring the resulting voltage drop. If the charge of the batteries
is deficient, a fault message is displayed and either a normal stop or an
alarm is initiated.
Communication Fault Except for the measurement boards all communication links are realized
by DDCS (Distributed Drive Control System). If one of these links is
missing a trip is initiated.
Cooling Circuit The water temperature, the water pressure or the water conductivity of the
cooling water are monitored for alarm and trip levels. In addition, the status
of the cooling water pumps, the water level in the expansion vessel and
the auxiliary fan are monitored.
Charging Fault The intermediate DC link voltage is monitored while the DC link capacitors
are charged. If the voltage does not reach a certain level after a pre-set
time a trip will be initiated.
Ground Fault The current in the output filter ground leg is monitored and compared with
two thresholds. The first threshold is set to a fixed percentage of the peak
value of the nominal inverter current. The second threshold is adjustable
and compared with the RMS value of the ground current. If the ground
ACS 1000 User’s Manual, Rev. E 3BHS102768 3-17 (of 20)
Chapter 3 - Design and Functional Description
current exceeds one of the thresholds a corresponding alarm message
will be displayed and the drive will be shut down.
Ground faults will be detected in the area between the ACS 1000 trans-
former secondary side and the motor.
ID-Run Fault During commissioning an identification run has to be carried out. The
nominal data for identification of the system parameters have to be
entered. If incorrect values are used and therefore the system parameters
cannot be determined, a trip is initiated. In this case the identification run
has to be repeated, after the correct data have been entered.
Inverter Temperature To insure the inverter does not exceed normal temperature limits, the
current is monitored and limited to the maximum permitted level.
Measurement Loss On the ADCVI board (analog digital conversion for voltage and current)
analog signals are converted into digital signals. The digital signals are
then transmitted via PPCC (fiber-optic bus system) to the interface board
which is the main interface to the converter control.
To guarantee proper operation of the protection functions included in the
converter, the status of the communication is monitored on the interface
board. If a fault is detected a trip is initiated.
Motor Phase Loss The phase loss function monitors the status of the motor cable connec-
tions. The function is useful especially during motor starting: the
ACS 1000 detects if any of the motor phases are not connected and
refuses to start.
The phase loss function also monitors the motor connection status during
normal operation. The motor operating frequency must be above a
minimum level in order for this feature to function. Should a motor phase
loss be detected a trip is initiated.
Motor Overload The 3-phase RMS value of the motor current is monitored and compared
with three adjustable thresholds. A pickup delay for each threshold can
also be set. In case an overload is detected an alarm message will be
displayed and the converter will be shut down.
Operating System The operating system of the microprocessor board monitors different func-
tions within the control software and will initiate a trip if a malfunction is
detected. Such faults are displayed as “Control SW fault”. Should one of
these faults be initiated during operation, the system should be restarted.
Overcurrent The overcurrent trip limit for the ACS 1000 is 2.2 times the nominal
inverter rms current. If this level is exceeded a trip is initiated.
Overvoltage The levels of the positive and negative DC link voltage are monitored to
detect whether an improper overvoltage condition develops. If these
voltage levels rise above 130% of their nominal levels an overvoltage trip
is initiated. On rare occasions, a combination of conditions can result in
the motor entering a self excitation mode that can cause the DC link
voltage to continue to rise despite the fact that a trip has been imple-
3-18 (of 20) 3BHS102768 ACS 1000 User’s Manual, Rev. E
Chapter 3 - Design and Functional Description
mented. If this condition occurs and if the DC link voltage levels rise above
135% of their nominal levels, a second overvoltage trip is initiated that
causes the inner 6 IGCTs to be gated simultaneously such that the motor
windings are effectively shunted together. This eliminates the self excita-
tion voltage that is causing the DC link voltage to rise. To provide ultimate
reliability the second overvoltage trip is implemented both in software and
redundantly in hardware (140%).
Short Circuit in Rectifier A short circuit in the rectifier bridge is detected by monitoring the DC link
Bridge voltage. If a short circuit is detected a trip is initiated and the drive is
disconnected from the supply voltage (MCB opening time ≤100 ms).
Short Circuit in Inverter The inverter is monitored to ensure that a short circuit condition does not
exist. If a short circuit is detected a trip is initiated.
Supply Phase Loss If the voltage ripple in the intermediate dc link rises above a pre-set level,
a supply phase may be lost. A trip is initiated.
3.7 Other Features
3.7.1 Customer Specific Options
Information on additional user specific options can be found in Appendix
B - Customer Specific Options.
3.7.2 PC Tools
DriveWindow DriveWindow offers several advanced, yet easy-to-use tools for
commissioning and control of the ACS 1000:
• The parameter and signal tool with a full set of device specific data
either in online or offline mode to check, study and change the
parameters
• The monitor tool as a graphic interface for monitoring digital and
analog signals
• The data logger as a versatile way of tracing fast and accurate events
• The fault logger displaying a fault history
• The application tools presenting the pin values in order to debug
application software and force constants.
With its component structure, enhanced flexibility is achieved to allow
working with several different types of products through different target
and communication drivers (the look and feel of the DriveWindow program
remains the same even when the product changes).
ACS 1000 User’s Manual, Rev. E 3BHS102768 3-19 (of 20)
Chapter 3 - Design and Functional Description
DriveSupport The DriveSupport tool offers an advanced level of servicing, maintaining
and troubleshooting of a drive system. Versatile features are provided for:
• Diagnosing faults and warnings
• Testing and verifying possible causes of faults
• Locating of faulty components
• Performing step-by step replacement procedures
• Recording maintenance activities.
The DriveSupport works on-line together with the DriveWindow tool.
3-20 (of 20) 3BHS102768 ACS 1000 User’s Manual, Rev. E
Chapter 4 - I/O Interfaces and Application Macros
4.1 Overview
This chapter provides information on I/O boards, macro-specific I/O
configurations and application macros. Typical applications for each
macro are listed as well.
Information regarding customer interfaces can also be found in:
• Chapter 6 - Installation on connection of mains, motor and auxiliary
power and in case of a water-cooled ACS 1000 on cooling water sup-
ply
• Fieldbus Control Adapter Start-up Manual on fieldbuses (i.e. Modbus,
Profibus...)
• Synchronized Bypass Installation and Start-Up Manual
• Braking Chopper Installation and Start-up Manual
• Application Note ACS 1000 Main Circuit Breaker Control
• Applicaiton Note ACS 1000 Tripping Loop.
Note: It is recommended to have the wiring diagrams at hand when read-
ing this chapter. For signal allocation see Appendix F - Wiring Diagrams.
4.2 Terms and Abbreviations
The following terms and abbreviations are used in this chapter:
I/O: Input/Output
DI: Digital Input
DO: Digital Output
AI: Analog Input
AO: Analog Ouput
MCB:Main Circuit Breaker
If a reference is made to an I/O, for instance DI 2.1, ‘2’ refers to the board
(in this case IOEC 2) and ‘1’ refers to the 1st. digital input of the same
board.
ACS 1000 User’s Manual, Rev. E 3BHS102768 4-1 (of 34)
Chapter 4 - I/O Interfaces and Application Macros
4.3 Input/Output Boards
4.3.1 Standard I/O Boards
The air-cooled ACS 1000 is fitted with IOEC 1and IOEC 2 and the water-
cooled ACS 1000 additionally with IOEC 3 as a standard. Optionally
IOEC 4 can be added.
Each board provides the following number of I/Os:
• Digital Inputs: 14
• Digital Outputs: 6
• Analog Inputs: 4
• Analog Outputs: 2
IOEC 1 is mainly used for internal control signals and the I/Os cannot be
accessed by the customer, except for the following:
• DI 1.8 Disable Local, accessible via terminal block X301
• AI 1.1 Ref Value 2, accessible via terminal block X301
• AO 1.1 programmable analog output
• AO 1.2 programmable analog output
If an output of an I/O board is not predefined for a standard function, a
macro or an option, the output can be assigned to a binary status signal of
the ACS 1000 by setting the corresponding parameter(s) accordingly.
In general all I/Os marked PROGRAMMABLE can be used.
Digital inputs marked FREE in the wiring diagrams cannot be programmed
by parameters.
4.3.2 I/O Ratings
All analog and digital I/Os are floating, galvanically isolated with the
following ratings:
Analog Input: 0..20 mA / 4..20 mA or 0..10 V / 2..10 V,
scalable by DIP switches
Analog Output: 0..20 mA / 4..20 mA, scalable by parameter
Digital Input: opto-coupled, rated for 22..250 VAC or
22..150 VDC
Digital Output: two-way contact,
rated for 250 VAC, 4 A.
4-2 (of 34) 3BHS102768 ACS 1000 User’s Manual, Rev. E
Chapter 4 - I/O Interfaces and Application Macros
4.3.3 Control Voltage Output
All IOEC boards have a built in DC control voltage output which can be
used for digital input signals.
Voltage: 24 VDC +15%/-10%
Max. load current: 180 mA
Terminals: X13/9: + 24 VDC
X13/10: 0 V
4.3.4 Potentiometer Supply
Each IOEC board provides a 10 VDC supply.
The 10 VDC supply on IOEC 1 can be used for an external setpoint poten-
tiometer which is wired to AI 1.1 (reference value 2).
A potentiometer connected to AI 2.1 (reference value 1) can be supplied
by the 10 VDC output of IOEC 2.
The 10 VDC supply is available at:
Terminals: X31/1: + 10 VDC
X32/1: 0 V
4.3.5 Digital Output Home Position
A digital output is shown in its home position, provided it is not inverted, as
illustrated in Figure 4-1:
• When signal READY is not active contact X21/1-2 is closed.
• When signal READY is active contact X21/2-3 is closed.
Terminal Signal Function
X21/1 DO 2.1
Relay output 1
V+ X21/2 DO 2.1
READY
DRIVE READY X21/3 DO 2.1
Figure 4-1 Digital output home position: IOEC 2, DO 2.1.
4.3.6 Location of IOEC Boards
The IOEC boards are installed in the control section of the ACS 1000, as
shown in Figure 4-2.
IOEC 1 is located in the center area of the swing frame. The terminal block
X301 which is connected to DI 1.8 DISABLE LOCAL and AI 1.1 REFER-
ENCE VALUE 2 is fitted on the right hand side of the control section.
IOEC 2, IOEC 3 and IOEC 4 are located on the right hand side of the
control section. The terminals on the IOEC boards are accessible when
the swing frame is open.
ACS 1000 User’s Manual, Rev. E 3BHS102768 4-3 (of 34)
Chapter 4 - I/O Interfaces and Application Macros
Swing frame
Electronic power
supply (EPS) board
AMC 3 control board
IOEC 1
(standard)
IOEC 2
(standard)
Terminal block
X301
IOEC 3
(standard for
water-cooled
converters)
IOEC 4
(optional)
Swing frame closed Swing frame removed (for illustration only)
Figure 4-2 Location of IOEC Boards
4.3.7 External Connections
The default I/O configuration of IOEC 1, IOEC 2, IOEC 3 and IOEC 4 can
be seen from the corresponding wiring diagrams in Appendix F - Wiring
Diagrams. The wiring diagrams show the terminals for all inputs and
outputs together with the corresponding signal name.
All contacts are shown in their home (de-energized) position.
The default I/O configuration of IOEC 2 depends on the selected applica-
tion macro. Refer to paragraph Application Macros, page 4-10.
4-4 (of 34) 3BHS102768 ACS 1000 User’s Manual, Rev. E
Chapter 4 - I/O Interfaces and Application Macros
4.3.8 Pre-defined I/O Signals
In Table 4-1 to Table 4-6 all predefined I/O signals are listed in functional
groups. I/Os of the standard IOEC boards are marked with a dot ( ).
Table 4-1 I/O Signals: Remote Control Interface
Stan Signal
I/O Signal Terminals Remarks
dard Inversion
DI 2.1 IOEC 2 Macro specific I/O not
STANDARD INPUT 1 X11/1-2 possible
DI 2.2 IOEC 2 Macro specific I/O not
STANDARD INPUT 2 X11/3-4 possible
DI 2.3 IOEC 2 Macro specific I/O not
STANDARD INPUT 3 X11/5-6 possible
DI 2.4 IOEC 2 Macro specific I/O not
STANDARD INPUT 4 X11/7-8 possible
DI 2.5 IOEC 2 Macro specific I/O not
STANDARD INPUT 5 X11/9-10 possible
DI 2.6 IOEC 2 Macro specific I/O not
STANDARD INPUT 6 X12/1-2 possible
DI 1.8 X301 External signal which disables local not
DISABLE LOCAL X1-2 operation via control panel CDP 312 possible
DI 2.7 IOEC 2 External closing command for the main not
REM ORD MCB CLOSE X12/3-4 circuit breaker possible
DI 2.13 IOEC 2 External opening command for the not
REM ORD MCB OPEN X13/5-6 main circuit breaker possible
DI 2.12 IOEC 2 External signal for fault reset (only not
REMOTE RESET X13/3-4 certain faults can be reset from remote) possible
DO 2.1 IOEC 2 Digital output indicating drive is ready possible
DRIVE READY X21/1-3 for operation
(i.e. MCB is closed, DC link is charged,
no interlocks are active)
DO 2.2 IOEC 2 Digital output indicating drive is running possible
DRIVE RUNNING X22/1-3
DO 2.3 IOEC 2 Digital output indicating an alarm has possible
DRIVE ALARM X23/1-3 come up
DO 2.4 IOEC 2 Digital output indicating drive has possible
DRIVE TRIP X24/1-3 tripped
DO 3.2 IOEC 3 Digital output indicating drive is in local 1
possible
LOCAL MODE X22/1-3 mode, control panel CDP312 is in
command
AI 2.1 IOEC 2 Macro specific I/O possible
REF VALUE 1 X31/2-X32/2
AI 1.1 X301 Macro specific I/O possible
REF VALUE 2 X4-5
ACS 1000 User’s Manual, Rev. E 3BHS102768 4-5 (of 34)
Chapter 4 - I/O Interfaces and Application Macros
Table 4-1 I/O Signals: Remote Control Interface (Continued)
Stan Signal
I/O Signal Terminals Remarks
dard Inversion
AO 1.1 IOEC 1 Default setting: possible
MOTOR FREQUENCY X31/6-X32/6 Actual value of motor frequency
AO is programmable
AO 1.2 IOEC 2 Default setting: possible
MOTOR TORQUE X31/7-X32/7 Actual value of motor torque
AO is programmable
AO 2.1 IOEC 2 Default setting: possible
SHAFT SPEED X31/6-X32/6 Actual value of motor speed
AO is programmable
AO 2.2 IOEC 2 Default setting: possible
MOT TORQUE FILTERED X31/7-X32/7 Actual value of filtered motor torque AO
is programmable
1.Standard only in water-cooled ACS 1000
Table 4-2 I/O Signals: Main Circuit Breaker
Stan Signal
I/O Signal Terminals Remarks
dard Inversion
DI 2.10 IOEC 2 Digital input indicating the main circuit not
MCB IS CLOSED X12/9-10 breaker is closed possible
DI 2.9 IOEC 2 Digial input indicating the main circuit not
MCB IS OPEN X12/7-8 breaker is open possible
DI 2.11 IOEC 2 Digital input indicating the main circuit possible
MCB IS AVAILABLE X13/1-2 breaker is not faulty, drawn-out or in
test position
DO 2.6 IOEC 2 Digital output to close the main circuit see par.
MCB ORD CLOSE X26/1-3 breaker, 21.05
pulse or maintained signal
DO 2.5 IOEC 2 Digital output to open the main circuit see par.
/MCB ORD OPEN X25/1-3 breaker, 21.05
pulse or maintained signal
DO 1.6 X300 Digital output wired to tripping loop, not
/MCB ORD TRIP X12 trips the main circuit breaker when low, possible
4-6 (of 34) 3BHS102768 ACS 1000 User’s Manual, Rev. E
Chapter 4 - I/O Interfaces and Application Macros
Table 4-3 I/O Signals: Transformer (TRAFO)
Stan Signal
I/O Signal Terminals Remarks
dard Inversion
DI 1.13 X300 External signal from a transformer not
/EXT TRAFO PROT TRIP X4-5 protection device, possible
signal active when low,
wired to tripping loop,
in case of trip:
- alarm is displayed
- main circut breaker is tripped
1
DI 3.1 IOEC 3 External signal for alarm indication of possible
OIL LEVEL ALARM X11/1-2 transformer oil level
DI 3.2 IOEC 3 External signal for alarm indication of 1
possible
TRAFO TEMP ALARM X11/3-4 transformer oil or winding temperature
DI 3.3 IOEC 3 External signal from a transformer oil or 1 not
/TRAFO TEMP TRIP X11/5-6 winding temperature monitor, possible
trips the drive
DI 3.4 IOEC 3 Signal from Buchholz relay for alarm 1
possible
BUCHHOLZ ALARM X11/7-8 indication
DI 3.5 IOEC 3 Signal from Buchholz relay, trips the 1
not
/BUCHHOLZ TRIP X11/9-10 drive possible
1
AI 3.1 IOEC 3 Signal from transformer oil or winding possible
TRAFO TEMP X31/2-X32/2 temperature monitor for alarm
indication,
drive reaction is set in parameter group
36
1.Standard only in water-cooled ACS 1000
Table 4-4 I/O Signals: Motor
Stan Signal
I/O Signal Terminals Remarks
dard Inversion
DI 1.14 X300 External signal from a motor protection not
/EXT MOT PROT TRIP X6-7 device, possible
wired to tripping loop,
signal active when low,
in case of trip:
- alarm is displayed
- main circuit breaker is tripped
1
DI 3.11 IOEC 3 External signal from a motor protection possible
EXT MOT PROT ALARM X13/1-2 device for alarm indication
DI 3.6 IOEC 3 External signal from motor cooling for 1
possible
MOT COOLING ALARM X12/1-2 alarm indication
DI 3.7 IOEC 3 External signal from motor cooling, trips 1 not
/MOT COOLING TRIP X12/3-4 the drive possible
ACS 1000 User’s Manual, Rev. E 3BHS102768 4-7 (of 34)
Chapter 4 - I/O Interfaces and Application Macros
Table 4-4 I/O Signals: Motor (Continued)
Stan Signal
I/O Signal Terminals Remarks
dard Inversion
1
DI 3.8 IOEC 3 External signal from a motor vibration possible
VIBRATION SV ALARM X12/5-6 monitor for alarm indication
DI 3.9 IOEC 3 External signal from a motor vibration 1
not
/VIBRATION SV TRIP X12/7-8 monitor, possible
trips the drive
DI 3.10 X300 External signal from a motor overspeed 1
not
/OVERSPEED TRIP X8-9 monitor, possible
signal is active when low,
wired to tripping loop,
in case of trip:
- alarm is displayed
- main circuit breaker is tripped
AI 2.2 wired to PT 100 External signal from a PT100 motor possible
MOT WDG TEMP PH U converter, see winding temperature sensor in phase
Wiring Diagram U,
drive reaction is set in parameter group
30
AI 2.3 wired to PT 100 External signal from a PT100 motor possible
MOT WDG TEMP PH V converter, see winding temperature sensor in phase V,
Wiring Diagram drive reaction is set in parameter group
30
AI 2.4 wired to PT 100 External signal from a PT100 motor possible
MOT WDG TEMP PH W converter, see winding temperature sensor in phase
Wiring Diagram W,
drive reaction is set in parameter group
30
1
AI 3.2 wired to PT 100 External signal from a PT100 motor possible
BRG TEMP DE converter, see bearing temperature sensor at the
Wiring Diagram driven end,
drive reaction is set in parameter group
35
1
AI 3.3 wired to PT 100 External signal from a PT100 motor possible
BRG TEMP NDE converter, see bearing temperature sensor at the non-
Wiring Diagram driven end,
drive reaction is set in parameter group
35
1.Standard only in water-cooled ACS 1000
4-8 (of 34) 3BHS102768 ACS 1000 User’s Manual, Rev. E
Chapter 4 - I/O Interfaces and Application Macros
Table 4-5 I/O Signals: Process
Stan Signal
I/O Signal Terminals Remarks
dard Inversion
DI 2.8 IOEC 2 External process stop signal ( or run not
/PROCESS STOP X12/5-6 enable), possible
signal is active when low
drive reaction is set in parameter group
21
DI 1.5 X300 External emergency off signal, not
/INT/EXT EMERGENCY OFF X2-3 signal is active when low, possible
wired to tripping loop,
in case of emergency off:
- alarm is displayed
- main circuit breaker is tripped
Table 4-6 I/O Signals: Others
Stan Signal
I/O Signal Terminal Remarks
dard Inversion
1
DI 3.13 X300 External signal from a supply voltage not
/SUPPL VOLT UNBALANCE X10-11 relay, possible
signal is active when low,
wired to tripping loop,
in case of trip:
- alarm is indicated
- main circuit breaker is tripped
DI 4.1 IOEC 4 External signal from a cooling water possible
EXT WTR COOLING ALARM X11/1-2 monitor for alarm indication
DI 4.2 IOEC 4 External signal from a cooling water not
/EXT WTR COOLING TRIP X11/3-4 monitor indicating a trip, possible
signal is active when low
in case of trip:
- alarm is displayed
- drive is tripped
DI 4.3 IOEC 4 External signal from a cooling fan or not
BRAKE CHOP FAN PUMP X11/5-6 pump for braking resistors indicating a possible
ALARM alarm,
signal is active when low
DI 4.4 IOEC 4 External signal from a temperature not
BRAKE CHOP TEMP ALARM X11/7-8 monitor for braking resistors indica-ting possible
an alarm,
signal is active when low
DI 4.5 IOEC 4 External signal indicating the output not
OUTPUT ISOL IS OPEN X11/9-10 isolator is open possible
DI 4.6 IOEC 4 External signal indicating the output not
OUTPUT ISOL IS CLOSED X12/1-2 isolator is closed possible
DI 4.7 IOEC 4 External signal indicating the input not
INPUT ISOL IS OPEN X12/3-4 isolator is open possible
ACS 1000 User’s Manual, Rev. E 3BHS102768 4-9 (of 34)
Chapter 4 - I/O Interfaces and Application Macros
Table 4-6 I/O Signals: Others (Continued)
Stan Signal
I/O Signal Terminal Remarks
dard Inversion
DI 4.8 IOEC 4 External signal indicating the input not
INPUT ISOL IS CLOSED X12/5-6 isolator is closed possible
1
AI 3.4 IOEC 3 External actual value of an outside air possible
OUTSIDE AIR TEMP X31/5-X32/5 temperature,
drive reaction is set in parameter group
37
1.Standard only in water-cooled ACS 1000
4.4 Application Macros
4.4.1 Overview
An application macro is a pre-programmed control software with specifi-
cally adapted parameter sets. Depending on the process, the appropriate
macro can be selected thus enabling a quick and easy start-up of the
ACS 1000.
All application macros have factory-set parameter values. These default
values can be left unchanged or they can be set individually according to
the needs by the ABB commissioning engineer. Ask the local ABB service
organization if more information is required.
The ACS 1000 can be operated using one of the following macros:
• Factory
• Speed Control
• Hand/Auto
• PID Control
• Sequential Control
• Torque Control
• Master/Follower
• User 1
• User 2
There are six digital inputs on IOEC board 2 marked STANDARD INPUT
which are assigned to the application macros. See Table 4-1. The function
of each digital input can change depending on the macro.
If I/Os are used which are not located on IOEC board 2 a reference to the
corresponding board is made.
4-10 (of 34) 3BHS102768 ACS 1000 User’s Manual, Rev. E
Chapter 4 - I/O Interfaces and Application Macros
Besides the standard and the macro specific I/Os, various optional I/Os
may be defined depending on the converter configuration. Refer to
Appendix B - Customer Specific Options for more details.
All other customer interface signals are the same for each application
macro. See also section Pre-defined I/O Signals, page 4-5.
The tables in the macro description only show the macro specific signal
allocations of digital and analog inputs. The digital outputs for status indi-
cations and for opening and closing the MCB as well as the analog outputs
are the same for all macros.
For detailed information on macro specific parameter settings see
Appendix H - Signal and Parameter Table, Chapter 3 - Default Parameter
Settings of Application Macros.
4.4.2 Factory Macro
Suitable Applications The Factory Macro is the default-set macro. It covers most of the common
applications such as pumps, fans, conveyors and other industrial applica-
tions where constant speed is required.
Description All drive commands and reference settings can be given from the
CDP 312 control panel or from an external control station.
The control station is selected with the LOC/REM key on the control panel.
The control panel can be disabled by closing DI 1.8. The digital input can
be accessed via terminals X301:1 and X301:2.
In remote control the following default signal interface applies:
• The reference value is connected to AI 2.1.
• The start/stop command is wired to DI 2.1.
• The sense of rotation can be changed with DI 2.2. The default setting
is FORWARD. It can be changed to REVERSE either by setting
parameter 11.03 to REVERSE or via DI 2.2 if parameter 11.03 has
been set to REQUEST before.
• Three constant speeds can be selected via DI 2.5 and DI 2.6 when
the drive is in remote control.
• Two preset acceleration/deceleration ramps can be selected via
DI 2.4.
When the Factory Macro is active the drive is speed controlled.
ACS 1000 User’s Manual, Rev. E 3BHS102768 4-11 (of 34)
Chapter 4 - I/O Interfaces and Application Macros
Input
power 1 L -> 600.0 rpm 1
Ext. controls Status Running
MotSpeed 600.00 rpm
MotCurr 75.0 A
Reference value, start/stop and direction commands are given from
the control panel. To change to EXTERNAL, press LOC REM key.
1 -> 600.0 rpm 1
Status Running
MotSpeed 600.00 rpm
MotCurr 75.0 A
M
3~
Reference value is read from analog input AI 2.1. Start/stop and
direction commands are given through digital inputs DI 2.1 and
Motor
DI 2.2.
Figure 4-3 Factory Macro, Control Overview
Input and Output The default I/O signals of the Factory Macro regarding opening/closing the
Signals MCB, starting/stopping the drive, speed, control location, reference and
actual values are shown in the following table. The corresponding para-
meters are listed as well. For further settings refer to Appendix H - Signal
and Parameter Table.
Table 4-7 Factory Macro, I/O Signals
Digital Inputs Terminal Parameter Remarks
DI 2.1 START/STOP IOEC 2 11.01 1 = start
X11/1-2 0 = stop
DI 2.2 DIRECTION IOEC 2 11.01 0 = forward
X11/3-4 1 = reverse
DI 2.4 IOEC 2 22.01 0 = accel / decel ramp 1 selected
ACCEL/DECELERATION RAMP X11/7-8 1 = accel / decel ramp 2 selected
1/2
DI 2.5 IOEC 2 33.01 Sel1 Sel2 Selection
CONST SPEED SEL 1 X11/9-10
DI 2.6 IOEC 2 33.01 0 0 Analog Ref.
CONST SPEED SEL 2 X12/1-2 1 0 Const. Speed 1
0 1 Const. Speed 2
1 1 Const. Speed 3
DI 1.8 X301 - 0 = control panel is enabled
DISABLE LOCAL X1-2 1 = control panel is disabled
DI 2.8 IOEC 2 16.01 Process stop or run enable
/PROCESS STOP X12/5-6 0 = drive will not start or stop if running
DI 2.7 IOEC 2 11.04 Pulse -> 1 = command for closing the main
REMOTE ORD MCB CLOSE X12/3-4 circuit breaker
4-12 (of 34) 3BHS102768 ACS 1000 User’s Manual, Rev. E
Chapter 4 - I/O Interfaces and Application Macros
Table 4-7 Factory Macro, I/O Signals (Continued)
DI 2.13 IOEC 2 11.04 Pulse -> 1 = command for opening the
REMOTE ORD MCB OPEN X13/5-6 main circuit breaker
DI 2.9 IOEC 2 21.07 Feedback from MCB
MCB IS OPEN X12/7-8 0 = MCB is open
1 = MCB is closed
DO 2.5 IOEC 2 21.06 Command to open the MCB
/MCB ORD OPEN X25/2-3 Pulse -> 0 = MCB is opened
DO 2.6 IOEC 2 21.06 Command to close the MCB
MCB ORD CLOSE X26/2-3 Pulse -> 1 = MCB is closed
Analog Inputs Terminal Parameter. Remarks
AI 2.1 IOEC 2 - Remote speed reference, if “Const Speed
EXTERNAL SPEED REFERENCE X31/2-X32/2 Sel 1” & “Const Speed Sel 2” are set to “0”
1
AI 1.1 X301 - Remote speed reference, if “Const Speed
EXTERNAL SPEED REFERENCE X3-X4 Sel 1” & “Const Speed Sel 2” are set to “0”
2
Control Signal Diagram The control signal diagram of the Factory Macro in Figure 4-4 shows how
the control signals i.e. reference value, starting/stopping commands, MCB
opening/closing commands are interconnected in the application software
of the ACS 1000.
ACS 1000 User’s Manual, Rev. E 3BHS102768 4-13 (of 34)
Chapter 4 - I/O Interfaces and Application Macros
12.06 12.03 33 33.01
EXT. REF2 EXT. REF1 CONSTANT CONST. SPEED
ANAL. INPUTS SELECTION SELECTION SPEEDS SELECTION
IOEC 2: AI1
IOEC 2-DI 5, 6
(REF1)
IOEC 1: AI1 REF1 SPEED CONTROL
(REF2) EXT1 REMOTE LOOP
KEYPAD * EXT2
23.01
SPEED REF
NOT SEL LOCAL
CH0
AMC-BOARD 12.01
COMM.MODULE KEYPAD SPEED
REF SEL CONTROLLER
REF. VALUE
REF 2 *
REMOTE REF2
KEYPAD (%) 3.09
CTRL. SIGNALS
LOCAL REF1 TORQ REF 2
CH2 (rpm)
DDCS LINK
TORQUE CONTROL
REF. VALUE LOOP
26.01
CTRL. SIGNALS TORQ SELECTOR
DIG. INPUTS
IOEC 2: DI 1...6
DI 7,13 3.13
TORQ REF USED
CONTROL
PANEL
REF
LOC
REM
START
START / STOP / DIRECTION
NOT SEL COMM.MODULE
LOCAL NOT USED START/STOP
STOP IOEC 2-DI 1,2
EXT1 REQUEST IOEC2-DI 8
KEYPAD REMOTE DIRECTION
FORWARD
COMM.MODULE EXT2 REVERSE
DIRECTION
NOT SEL
IOEC2-DI 1,2
11.03 16.01
KEYPAD
DIRECTION PROCESS STOP
COMM.MODULE EXT1
11.01 11.02 12.02
PUSH EXT1 EXT2 EXT1/EXT2
BUTTONS STRT/STOP/DIR STRT/STOP/DIR SELECTION
ON
ACS 1000
IOEC 2-DI 9
IOEC 1:
DI 6 MCB Offline MCB IS OPEN
DI 7 MCB Online IOEC 2-DI 10 MCB
MCB IS CLOSED MCB OPEN COMMAND
IOEC 2-DI 11 CONTROL
NOT SEL LOCAL MCB IS AVAILABLE LOGIC MCB
IOEC 2-DI 7,13 EXT1 CLOSE COMMAND
COMM.MODULE REMOTE
NOT SEL EXT2
IOEC 2-DI 7,13
COMM.MODULE
11.04 11.05 21.06 21.07 21.08 21.09 21.10
EXT1 EXT2 MCB ON MCB MCB MCB MCB
MCB CONTROL MCB CONTROL CTRL. MODE OPEN SIGNAL AVAILABLE CLOS. TIME LIM OPEN TIME LIM
* for further settings see Signal and Parameter Table
Figure 4-4 Control Signal Diagram of Factory Macro
4-14 (of 34) 3BHS102768 ACS 1000 User’s Manual, Rev. E
Chapter 4 - I/O Interfaces and Application Macros
4.4.3 Speed Macro
Suitable Applications The Speed Macro can be used for the same applications as the Factory
Macro. The only difference to the Factory Macro is that the motor control
parameters of the ACS 1000 will not be overwritten and set to 0 when the
macro is activated.
For further information see Factory Macro, page 4-11.
4.4.4 Hand/Auto Macro
Suitable Applications The Hand/Auto Macro is suitable for applications where the speed has to
be controlled automatically by a process automation system and manually
by an external control panel. The active control station is selected via a
digital input.
The macro is also recommendable when two external control stations
exist from where the reference value can be set and the drive can be
started and stopped. The active control station for the reference value is
selected via a digital input.
Description Start/stop commands and reference settings can be given from the control
panel of the ACS 1000 or from one of two external control stations, EXT1
(Hand) or EXT2 (Auto) (see Figure 4-5).
The LOC/REM key on the control panel is used to enable the control panel
or the external control stations. The control panel can be disabled by
closing DI 1.8. The digital input can be accessed via terminals X301:1 and
X301:2.
The remote control station EXT1 or EXT2 is selected with DI 2.5.
The control signals of EXT1 (Hand) for starting and stopping are
connected to DI 2.1. Open/close commands for the MCB are wired to
DI 2.13 and DI 2.7. The reference value is connected to AI 2.1. The speed
reference value is given in rpm.
The commands from EXT 2 (Auto) for starting and stopping are connected
to DI 2.2 and for opening/closing the MCB to DI 2.3 and DI 2.4. The refer-
ence value is connected to AI 1.1. The analog input on IOEC 1 is acces-
sible through terminals X301:3 and 4. The speed reference value is given
as a percentage of the maximum speed of the drive (see parameters
12.07 and 12.08).
One constant speed can be selected through DI 2.6.
The drive is speed controlled when the Hand/Auto Macro is selected.
By default, the direction is fixed to FORWARD (see parameter 11.03).
ACS 1000 User’s Manual, Rev. E 3BHS102768 4-15 (of 34)
Chapter 4 - I/O Interfaces and Application Macros
1 L -> 600.0 rpm 1
Input Status Running
EXT1 (rpm) = power MotSpeed 600.00 rpm
Hand control
MotCurr 75.0 A
Reference, start/stop and direction commands are given from the
control panel. To change to EXTERNAL, press LOC REM key.
Hand/Auto
Const.speed1 1 -> 600.0 rpm 1
Status Running
PLC MotSpeed 600.00 rpm
or
ext. controls
MotCurr 75.0 A
EXT2 (%) = Panel display in REMOTE:
Auto control Hand control: Reference is read from analog input AI 1.1.
M
3∼ Start/stop command is given through digital input DI 2.1.
Motor
Figure 4-5 Hand/Auto Macro, Control Overview
Input and Output The default I/O signals of the Hand/Auto Macro regarding opening/closing
Signals the MCB, starting/stopping the drive, speed, control location, reference
and actual values are shown in the following table. The corresponding
parameters are listed as well. For further settings refer to Appendix H -
Signal and Parameter Table.
Table 4-8 Hand/Auto Macro, I/O Signals
Digital Inputs Terminal Parameter Remarks
DI 2.1 IOEC 2 11.01 1 = start
START/STOP HAND X11/1-2 0 = stop
DI 2.6 IOEC 2 11.02 1 = start
START/STOP AUTO X12/1-2 0 = stop
DI 2.7 IOEC 2 11.04 1 = request for closing the main circuit
REMOTE ORD MCB CLOSE X12/3-4 breaker
HAND
DI 2.13 IOEC 2 11.04 1 = request for opening the main circuit
REMOTE ORD MCB OPEN HAND X13/5-6 breaker
DI 2.3 IOEC 2 11.05 Pulse -> 1 = command for closing the
REMOTE ORD MCB CLOSE X11/5-6 main circuit breaker
AUTO
DI 2.4 IOEC 2 11.05 Pulse -> 1 = command for opening the
REMOTE ORD MCB OPEN AUTO X11/7-8 main circuit breaker
DI 2.5 IOEC 2 12.02 0 = hand selected
EXT1/EXT2 SELECTION X11/9-10 1 = auto selected
4-16 (of 34) 3BHS102768 ACS 1000 User’s Manual, Rev. E
Chapter 4 - I/O Interfaces and Application Macros
Table 4-8 Hand/Auto Macro, I/O Signals (Continued)
Digital Inputs Terminal Parameter Remarks
DI 2.2 IOEC 2 33.01 If set to “1” a predefined constant speed
CONSTANT SPEED 1 X11/3-4 reference is selected
DI 1.8 X301 - 0 = control panel is enabled
DISABLE LOCAL X1-2 1 = control panel is disabled
DI 2.8 IOEC 2 16.01 Process stop or run enable
/PROCESS STOP X12/5-6 0 = drive will not start or stop if running
DI 2.9 IOEC 2 21.07 Feedback from MCB
MCB IS OPEN X12/7-8 0 = MCB is open
1 = MCB is closed
Analog Inputs Terminal Parameter Remarks
AI 2.1 IOEC 2 - External reference 1 in rpm
REFERENCE 1 X31/2-X32/2
HAND
AI 1.1 X301: - External reference 2 in %
REFERENCE 2 X3-X4
AUTO
Control Signal Logic The control signal diagram of the Hand/Auto Macro in Figure 4-6 shows
how the control signals i.e. reference value, starting/stopping commands,
MCB opening/closing commands are interconnected in the application
software of the ACS 1000.
ACS 1000 User’s Manual, Rev. E 3BHS102768 4-17 (of 34)
Chapter 4 - I/O Interfaces and Application Macros
12.06 12.03 33 33.01
EXT. REF2 EXT. REF1 CONSTANT CONST. SPEED
ANAL. INPUTS SELECTION SELECTION SPEEDS SELECTION
IOEC 2: AI1
IOEC 2-DI 2
(REF1)
REF1 (SPEED 2) SPEED CONTROL
IOEC 1: AI1
(REF2) EXT1 REMOTE LOOP
KEYPAD * EXT2
23.01
SPEED REF
NOT SEL LOCAL
CH0
AMC-BOARD 12.01
COMM.MODULE KEYPAD SPEED
REF SEL CONTROLLER
REF. VALUE
REF 2 *
REMOTE REF2
KEYPAD (%) 3.09
CTRL. SIGNALS
LOCAL REF1 TORQ REF 2
CH2 (rpm)
DDCS LINK
TORQUE CONTROL
REF. VALUE LOOP
26.01
CTRL. SIGNALS TORQ SELECTOR
DIG. INPUTS
IOEC 2: DI 1...6
DI 7,13 3.13
TORQ REF USED
CONTROL
PANEL
REF
LOC
REM
START
START / STOP / DIRECTION
NOT SEL COMM.MODULE
LOCAL NOT USED START/STOP
STOP IOEC 2-DI 1
EXT1 REQUEST IOEC2-DI 8
KEYPAD REMOTE DIRECTION
FORWARD
COMM.MODULE EXT2 REVERSE
DIRECTION
NOT SEL
IOEC2-DI 6
11.03 16.01
KEYPAD
DIRECTION PROCESS STOP
COMM.MODULE IOEC 2-DI 5
11.01 11.02 12.02
PUSH EXT1 EXT2 EXT1/EXT2
BUTTONS STRT/STOP/DIR STRT/STOP/DIR SELECTION
ON
ACS 1000
IOEC 2-DI 9
IOEC 1:
DI 6 MCB Offline MCB IS OPEN
DI 7 MCB Online IOEC 2-DI 10 MCB
MCB IS CLOSED MCB OPEN COMMAND
IOEC 2-DI 11 CONTROL
NOT SEL LOCAL MCB IS AVAILABLE LOGIC MCB
IOEC 2-DI 7,13 EXT1 CLOSE COMMAND
COMM.MODULE REMOTE
NOT SEL EXT2
IOEC 2-DI 3,4
COMM.MODULE
11.04 11.05 21.06 21.07 21.08 21.09 21.10
EXT1 EXT2 MCB ON MCB MCB MCB MCB
MCB CONTROL MCB CONTROL CTRL. MODE OPEN SIGNAL AVAILABLE CLOS. TIME LIM OPEN TIME LIM
* for further settings see Signal and Parameter Table
Figure 4-6 Control Signal Diagram of Hand/Auto Macro
4-18 (of 34) 3BHS102768 ACS 1000 User’s Manual, Rev. E
Chapter 4 - I/O Interfaces and Application Macros
4.4.5 PID Macro
Suitable applications The PID Macro is intended for the use with closed loop control systems
such as pressure control, level control and flow control. For example:
• Booster pumps of municipal water supply systems
• Automatic level control of water reservoirs
• Booster pumps of district heating systems
• Speed control of different types of material handling systems where
the material flow has to be regulated.
Reference
Level
trans-
ducer
Actual value
Pump
Description The PID Macro allows to control a process variable - such as pressure or
flow - by adjusting the speed of the motor accordingly.
Start/stop commands and reference settings can be given from the control
panel of the ACS 1000 or from an external control station.
The LOC/REM key on the control panel is used to enable the control panel
or the external control station. The control panel can be disabled by
closing DI 1.8. The digital input can be accessed via terminals X301:1 and
X301:2.
Parameter group 40 provides the necessary settings for the PID Macro.
The PID Macro requires IOEC board 4.
The process reference value is connected to AI 1.1. The customer termi-
nals for AI 1.1 are available on terminal block X301.
Two process feedback signals can be used. Actual value 1 is connected
to AI 4.1 and actual value 2 to AI 4.2. Parameter 40.06 provides the
settings regarding the number of feedback signals and their interconnec-
tion.
If the PID controller is part of a higher-level control system and the speed
of the motor is to be controlled directly, the speed reference value has to
be wired to AI 2.1.
The internal PID controller is bypassed if external control station EXT1 is
ACS 1000 User’s Manual, Rev. E 3BHS102768 4-19 (of 34)
Chapter 4 - I/O Interfaces and Application Macros
selected (DI 2.3 is open). Then the ACS 1000 no longer controls the
process variable but the speed of the motor directly.
Default actual signals shown on the control panel are MOTOR SPEED,
ACTUAL VALUE1 and CONTROL DEVIATION.
Input
power 0 L 1242.0 rpm I
MotSpeed 1242.0 rpm
Actual Value1 52.00 %
EXT1 CtrlDev 0.1 %
Ref.
Reference value, start/stop and direction
Actual value PT
PID EXT2
commands are given from the control panel. To
START/STOP(EXT1)
change to EXTERNAL , press the LOC REM key.
START/STOP(EXT2)
Speed/Process
(EXT1/EXT2)
0 52.1 % I
Run enable MotSpeed 1242.0 rpm
Const.speed Actual Value1 52.00 %
CtrlDev 0.1 %
External Control
Reference is read from analog input AI 1.1. Start/
EXT1 (rpm) = Direct speed control
M stop command is given through DI 2.1 when in
EXT2 (%) = Process PID control 3∼
direct speed control (EXT1) or through digital
Keypad Control
Motor input DI 2.6 when in Process Control (EXT2).
REF1 (rpm) = Direct speed control
REF2 (%) = Process PID control
Figure 4-7 PID Macro, Control Overview
Input and Output The default I/O signals of the PID Macro regarding opening/closing the
Signals MCB, starting/stopping the drive, speed, control location, reference and
actual values are shown in the following table. The corresponding para-
meters are listed as well. For further settings refer to Appendix H - Signal
and Parameter Table.
Table 4-9 PID Macro, I/O Signals
Digital Inputs Terminal Parameter Remarks
DI 2.1 IOEC 2 11.01 1 = start
START/STOP X11/1-2 0 = stop
DI 2.2 IOEC 2 11.01 0 = forward
DIRECTION X11/3-4 1 = reverse
DI 2.3 IOEC 2 12.02 Selection of external reference
EXT 1/2 SELECTION X11/5-6 0 = EXT 1
1 = EXT 2
DI 2.4 IOEC 2 22.01 0 = accel / decel ramp 1 selected
ACCEL/DECELERATION RAMP 1/ X11/7-8 1 = accel / decel ramp 2 selected
2
DI 2.5 IOEC 2 33.01 Sel1 Sel2 Selection
CONST SPEED SEL 1 X11/9-10
4-20 (of 34) 3BHS102768 ACS 1000 User’s Manual, Rev. E
Chapter 4 - I/O Interfaces and Application Macros
Table 4-9 PID Macro, I/O Signals (Continued)
DI 2.6 IOEC 2 33.01 0 0 Analog Ref.
CONST SPEED SEL 2 X12/1-2 1 0 Const. Speed 1
0 1 Const. Speed 2
1 1 Const. Speed 3
DI 1.8 X301 - 0 = control panel is enabled
DISABLE LOCAL X1-2 1 = control panel is disabled
DI 2.8 IOEC 2 16.01 Process stop or run enable
/PROCESS STOP X12/5-6 0 = drive will not start or stop if running
DI 2.7 IOEC 2 11.04 Pulse -> 1 = command for closing the main
REMOTE ORD MCB CLOSE X12/3-4 circuit breaker
DI 2.13 IOEC 2 11.04 Pulse -> 1 = command for opening the
REMOTE ORD MCB X13/5-6 main circuit breaker
OPEN
DI 2.9 IOEC 2 21.07 Feedback from MCB
MCB IS OPEN X12/7-8 0 = MCB is open
1 = MCB is closed
Analog Inputs Terminal Parameter Remarks
AI 2.1 IOEC 2 - External reference
ANALOG REFERENCE X31/2-X32/2
AI 4.1 IOEC 4 - Process feedback
ACTUAL VALUE X31/2-X32/2
AI 4.2 IOEC 4 - Process feedback
ACTUAL VALUE X31/3-X32/3
Control Signal Diagram The control signal diagram of the PID Macro in Figure 4-8 shows how the
control signals i.e. reference value, starting/stopping commands, MCB
opening/closing commands are interconnected in the application software
of the ACS 1000.
ACS 1000 User’s Manual, Rev. E 3BHS102768 4-21 (of 34)
Chapter 4 - I/O Interfaces and Application Macros
12.06 12.03 33 33.01
EXT. REF2 EXT. REF1 CONSTANT CONST. SPEED
ANAL. INPUTS SELECTION SELECTION SPEEDS SELECTION
IOEC 2: AI1
IOEC 2-DI 4
(REF1)
REF1 (SPEED 4) SPEED CONTROL
IOEC 1: AI1
(REF2) EXT1 REMOTE LOOP
KEYPAD * EXT2
23.01
SPEED REF
NOT SEL LOCAL
CH0
AMC-BOARD 12.01
COMM.MODULE KEYPAD SPEED
REF SEL CONTROLLER
REF. VALUE
REF 1 *
REMOTE REF2
KEYPAD (%) 3.09
CTRL. SIGNALS
LOCAL REF1 TORQ REF 2
ANAL. INPUTS (rpm)
IOEC 4: AI1 PID
(ACT1) CTRL.
AI1
ACT 1 * TORQUE CONTROL
LOOP
(ACT2)
ACT 2 * 26.01
TORQ SELECTOR
DIG. INPUTS
IOEC 2: DI 1...6 40.06
DI 7,13 ACTUAL 3.13
VALUE SEL. TORQ REF USED
CONTROL
PANEL
REF
LOC
REM
START
START / STOP / DIRECTION
NOT SEL COMM.MODULE
LOCAL NOT USED START/STOP
STOP IOEC 2-DI 1
EXT1 REQUEST IOEC2-DI 8
KEYPAD REMOTE DIRECTION
FORWARD
COMM.MODULE EXT2 REVERSE
DIRECTION
NOT SEL
IOEC2-DI 6
11.03 16.01
KEYPAD
DIRECTION PROCESS STOP
COMM.MODULE IOEC 2-DI 3
11.01 11.02 12.02
PUSH EXT1 EXT2 EXT1/EXT2
BUTTONS STRT/STOP/DIR STRT/STOP/DIR SELECTION
ON
ACS 1000
IOEC 2-DI 9
IOEC 1:
DI 6 MCB Offline MCB IS OPEN
DI 7 MCB Online IOEC 2-DI 10 MCB
MCB IS CLOSED MCB OPEN COMMAND
IOEC 2-DI 11 CONTROL
NOT SEL LOCAL MCB IS AVAILABLE LOGIC MCB
IOEC 2-DI 7,13 EXT1 CLOSE COMMAND
COMM.MODULE REMOTE
NOT SEL EXT2
IOEC 2-DI 7,13
COMM.MODULE
11.04 11.05 21.06 21.07 21.08 21.09 21.10
EXT1 EXT2 MCB ON MCB MCB MCB MCB
MCB CONTROL MCB CONTROL CTRL. MODE OPEN SIGNAL AVAILABLE CLOS. TIME LIM OPEN TIME LIM
* for further settings see Signal and Parameter Table
Figure 4-8 Control Signal Diagram of PID Macro
4-22 (of 34) 3BHS102768 ACS 1000 User’s Manual, Rev. E
Chapter 4 - I/O Interfaces and Application Macros
4.4.6 Torque Macro
Suitable applications The Torque Macro is set up for processes requiring torque control, e.g.
mixers and slave drives. The torque reference comes from a process auto-
mation system or a control panel.
Description The Torque Macro is used in applications requiring torque control of the
motor. The settings for torque reference and torque reference handling
can be adjusted in parameter group 25 and 26 respectively.
The torque reference is given through AI 2.1 as a current signal. By
default, 0 mA correspond to 0% and 20 mA to 100% of the rated motor
torque.
The start and stop command is given through DI 2.1 and the sense of rota-
tion is changed by means of DI 2.2.
Changing from torque control to speed control is achieved by setting
DI 2.3 to low.
It is also possible to change the control location from external to local (i.e.
to control panel) by pressing the LOC/REM key. When LOCAL is selected
on the control panel the drive is speed controlled by default. If torque
control is required parameter 12.1 KEYPAD REF SELECT has to be
changed to REF2 (%). The control panel can be disabled by closing DI 1.8.
The digital input can be accessed via terminals X301:1 and X301:2.
Default settings for the display of the control panel are SPEED, TORQUE
and CONTROL LOCATION.
Input
0 L 1242.0 rpm I
power MotSpeed 1242.0 rpm
MotTorq 66.00 %
Ext. controls CtrlLoc LOCAL
EXT1 Reference value, start, stop and direction commands are given
Speed ref.
from the control panel. To change to EXTERNAL press LOC
Torque ref. EXT2 REM key.
0 50.0 % I
MotSpeed 1242.0 rpm
MotTorq 66.00 %
CtrlLoc EXT2
The reference value is read from AI 2.1 (if torque control is
M selected) or AI 1.1 (if speed control is selected). Start, stop and
3∼
direction commands are given through DI 2.1 and DI 2.2. Selec-
Motor tion between speed and torque control is done through DI 2.3.
External Control Keypad Control
EXT1 (rpm) = Speed control REF1 (rpm) = Speed control
EXT2 (%) = Torque control REF2 (%) = Torque control
Figure 4-9 Torque Macro, Control Overview
ACS 1000 User’s Manual, Rev. E 3BHS102768 4-23 (of 34)
Chapter 4 - I/O Interfaces and Application Macros
Input and Output The default I/Os of the Torque Macro regarding opening/closing the MCB,
Signals starting/stopping the drive, speed, control location, reference and actual
values are shown in the following table. The corresponding parameters
are listed as well. For further settings refer to Appendix H - Signal and
Parameter Table.
Table 4-10 Torque Macro, I/O Signals
Digital Inputs Terminal Parameter Remarks
DI 2.1 IOEC 2 11.01 1 = start
START/STOP X11/1-2 0 = stop
DI 2.2 IOEC 2 11.01 0 = forward
DIRECTION X11/3-4 1 = reverse
DI 2.3 IOEC 2 12.02 0 = speed control
EXT 1/2 SELECTION X11/5-6 1 = torque control
DI 2.4 IOEC 2 22.01 0 = accel / decel ramp 1 selected
ACCEL/DECEL 1/2 SELECTION X11/7-8 1 = accel / decel ramp 2 selected
DI 2.5 IOEC 2 33.01 If set to “1” the predefined constant speed
CONSTANT SPEED SELECTION X11/9-10 reference is selected
DI 1.8 X301 - 0 = control panel is enabled
DISABLE LOCAL X1-2 1 = control panel is disabled
DI 2.8 IOEC 2 16.01 Process stop or run enable
/PROCESS STOP X12/5-6 0 = drive will not start or stop if running
DI 2.7 IOEC 2 11.04 Pulse -> 1 = command for closing the main
REMOTE ORD MCB CLOSE X12/3-4 circuit breaker
DI 2.13 IOEC 2 11.04 Pulse -> 1 = command for opening the
REMOTE ORD MCB X13/5-6 main circuit breaker
OPEN
DI 2.9 IOEC 2 21.07 Feedback from MCB
MCB IS OPEN X12/7-8 0 = MCB is open
1 = MCB is closed
Analog Inputs Terminal Parameter Remarks
AI 1.1 IOEC 1 - Speed reference (EXT1)
SPEED REFERENCE X31/2-X32/2
AI 2.1 IOEC 2 - Torque reference (EXT2)
TORQUE REFERENCE X31/2-X32/2
Control Signal Diagram The control signal diagram of the Torque Macro in Figure 4-10 shows how
the control signals i.e. reference value, starting/stopping commands, MCB
opening/closing commands are interconnected in the application software
of the ACS 1000.
4-24 (of 34) 3BHS102768 ACS 1000 User’s Manual, Rev. E
Chapter 4 - I/O Interfaces and Application Macros
12.06 12.03 33 33.01
EXT. REF2 EXT. REF1 CONSTANT CONST. SPEED
ANAL. INPUTS SELECTION SELECTION SPEEDS SELECTION
IOEC 2: AI1
(REF1) IOEC 2-DI 4
IOEC 1: AI1 REF1 (SPEED 4) SPEED CONTROL
(REF2) EXT1 REMOTE LOOP
KEYPAD * EXT2
23.01
SPEED REF
NOT SEL LOCAL
CH0
AMC-BOARD 12.01
COMM.MODULE KEYPAD SPEED
REF SEL CONTROLLER
REF. VALUE
REF 2 *
REMOTE REF2
KEYPAD (%) 3.09
CTRL. SIGNALS
LOCAL REF1 TORQ REF 2
CH2 (rpm)
DDCS LINK
REF. VALUE
CTRL. SIGNALS
DIG. INPUTS
IOEC 2: DI 1...6 EXT1 TORQUE CONTROL
DI 7,13 REMOTE LOOP
EXT2 26.01
LOCAL TORQ SELECTOR
REF2
(%)
CONTROL REF1
PANEL (rpm) 3.13
TORQ REF USED
REF
LOC
REM
START
START / STOP / DIRECTION
NOT SEL COMM.MODULE
LOCAL NOT USED START/STOP
STOP IOEC 2-DI 1,2
EXT1 REQUEST IOEC2-DI 8
KEYPAD REMOTE DIRECTION
FORWARD
COMM.MODULE EXT2 REVERSE
DIRECTION
NOT SEL
IOEC2-DI 1,2
11.03 16.01
KEYPAD
DIRECTION PROCESS STOP
COMM.MODULE IOEC 2-DI 3
11.01 11.02 12.02
PUSH EXT1 EXT2 EXT1/EXT2
BUTTONS STRT/STOP/DIR STRT/STOP/DIR SELECTION
ON
ACS 1000
IOEC 2-DI 9
IOEC 1:
DI 6 MCB Offline MCB IS OPEN
DI 7 MCB Online IOEC 2-DI 10 MCB
MCB IS CLOSED MCB OPEN COMMAND
IOEC 2-DI 11 CONTROL
NOT SEL LOCAL MCB IS AVAILABLE LOGIC MCB
IOEC 2-DI 7,13 EXT1 CLOSE COMMAND
COMM.MODULE REMOTE
NOT SEL EXT2
IOEC 2-DI 7,13
COMM.MODULE
11.04 11.05 21.06 21.07 21.08 21.09 21.10
EXT1 EXT2 MCB ON MCB MCB MCB MCB
MCB CONTROL MCB CONTROL CTRL. MODE OPEN SIGNAL AVAILABLE CLOS. TIME LIM OPEN TIME LIM
* for further settings see Signal and Parameter Table
Figure 4-10 Control Signal Diagram of Torque Macro
ACS 1000 User’s Manual, Rev. E 3BHS102768 4-25 (of 34)
Chapter 4 - I/O Interfaces and Application Macros
4.4.7 Sequential Macro
Suitable Applications The Sequential Macro is typically used in processes requiring different
constant speed settings and/or different acceleration/deceleration settings
in addition to an adjustable speed reference value. Up to seven constant
speed settings and two acceleration/deceleration settings are possible.
The selection of the different settings can be automized by a process
control system or can be made manually by selector switches which are
connected to the corresponding digital inputs.
Description The macro offers seven preset constant speeds which can be activated by
DI 2.4, DI 2.5 and DI 2.6.
The parameters assigned for constant speed settings are in group 33.
Two preset acceleration/deceleration ramps are selectable via DI 2.3.
The start/stop command is connected to DI 2.1 and the sense of rotation
can be changed via DI 2.2.
An external speed reference value can be wired to AI 2.1. It is active if
DI 2.4, DI 2.5 and DI 2.6 are low.
Operational commands and reference value can also be given using the
control panel if set to local. The control panel can be disabled by closing
DI 1.8. The digital input can be accessed via terminals X301:1 and X301:2.
Default actual values shown on the Control Panel are FREQUENCY,
CURRENT and POWER.
Input Speed
power
Ext. controls Speed 3
Speed 2 Stop with
deceleration
ramp
Speed 1
Time
Accel1 Accel1 Accel2 Decel2
Start/Stop
Accel1/Decel1
M
3∼ Speed 1
Speed 2
Motor Accel2/Decel2
Speed 3
External control
EXT1 (rpm) = Speed control
EXT2 (%) = Speed control Example of sequential control using constant speeds and different
Keypad control acceleration and deceleration times.
REF1 (rpm) = Speed control
REF2 (%) = Speed control
Figure 4-11Sequential Macro, Control Overview
4-26 (of 34) 3BHS102768 ACS 1000 User’s Manual, Rev. E
Chapter 4 - I/O Interfaces and Application Macros
Input and Output The default I/O signals of the Sequential Macro regarding opening/closing
Signals the MCB, starting/stopping the drive, speed, control location, reference
and actual values are shown in the following table. The corresponding
parameters are listed as well. For further settings refer to Appendix H -
Signal and Parameter Table.
Table 4-11 Sequential Macro, I/O Signals
Digital Inputs Terminal Parameter Remarks
DI 2.1 IOEC 2 11.01 1 = start
START/STOP X11/1-2 0 = stop
DI 2.2 IOEC 2 11.01 0 = forward
DIRECTION X11/3-4 1 = reverse
DI 2.3 IOEC 2 22.01 0 = accel / decel ramp 1 selected
ACCEL/DECEL 1/2 X11/5-6 1 = accel / decel ramp 2 selected
SELECTION
DI 2.4 IOEC 2 33.01 Sel1 Sel2 Sel3 Selection
CONST SPEED SEL 1 X11/7-8
DI 2.5 IOEC 2 33.01 0 0 0 Analog Ref.
CONST SPEED SEL 2 X11/9-10 1 0 0 Const. Speed 1
0 1 0 Const. Speed 2
DI 2.6 IOEC 2 33.01 1 1 0 Const. Speed 3
CONST SPEED SEL 3 X12/1-2 0 0 1 Const. Speed 4
1 0 1 Const. Speed 5
0 1 1 Const. Speed 6
1 1 1 Const. Speed 7
DI 1.8 X301 - 0 = control panel is enabled
DISABLE LOCAL X1-2 1 = control panel is disabled
DI 2.8 IOEC 2 16.01 Process stop or run enable
/PROCESS STOP X12/5-6 0 = drive will not start or stop if running
DI 2.7 IOEC 2 11.04 Pulse -> 1 = command to close the main
REMOTE ORD MCB CLOSE X12/3-4 circuit breaker
DI 2.13 IOEC 2 11.04 Pulse -> 1 = command to open the main
REMOTE ORD MCB X13/5-6 circuit breaker
OPEN
DI 2.9 IOEC 2 21.07 Feedback from MCB
MCB IS OPEN X12/7-8 0 = MCB is open
1 = MCB is closed
Analog Inputs Terminal Parameter Remarks
AI 2.1 IOEC 2 - External reference
ANALOG REFERENCE X31/2-X32/2
Control Signal Diagram The control signal diagram of the Sequential Macro in Figure 4-12 shows
how the control signals i.e. reference value, starting/stopping commands,
ACS 1000 User’s Manual, Rev. E 3BHS102768 4-27 (of 34)
Chapter 4 - I/O Interfaces and Application Macros
MCB opening/closing commands are interconnected in the application
software of the ACS 1000.
12.06 12.03 33 33.01
EXT. REF2 EXT. REF1 CONSTANT CONST. SPEED
ANAL. INPUTS SELECTION SELECTION SPEEDS SELECTION
IOEC 2: AI1
IOEC 2
(REF1)
REF1 -DI 4,5,6 SPEED CONTROL
IOEC 1: AI1
(REF2) EXT1 REMOTE LOOP
KEYPAD * EXT2
23.01
SPEED REF
NOT SEL LOCAL
CH0
AMC-BOARD 12.01
COMM.MODULE KEYPAD SPEED
REF SEL CONTROLLER
REF. VALUE
REF 2 *
REMOTE REF2
KEYPAD (%) 3.09
CTRL. SIGNALS
LOCAL REF1 TORQ REF 2
CH2 (rpm)
DDCS LINK
TORQUE CONTROL
REF. VALUE LOOP
26.01
CTRL. SIGNALS TORQ SELECTOR
DIG. INPUTS
IOEC 2: DI 1...6
DI 7,13 3.13
TORQ REF USED
CONTROL
PANEL
REF
LOC
REM
START
START / STOP / DIRECTION
NOT SEL COMM.MODULE
LOCAL NOT USED START/STOP
STOP IOEC 2-DI 1,2
EXT1 REQUEST IOEC2-DI 8
KEYPAD REMOTE DIRECTION
FORWARD
COMM.MODULE EXT2 REVERSE
DIRECTION
NOT SEL
IOEC2-DI 1,2
11.03 16.01
KEYPAD
DIRECTION PROCESS STOP
COMM.MODULE EXT1
11.01 11.02 12.02
PUSH EXT1 EXT2 EXT1/EXT2
BUTTONS STRT/STOP/DIR STRT/STOP/DIR SELECTION
ON
ACS 1000
IOEC 2-DI 9
IOEC 1:
DI 6 MCB Offline MCB IS OPEN
DI 7 MCB Online IOEC 2-DI 10 MCB
MCB IS CLOSED MCB OPEN COMMAND
IOEC 2-DI 11 CONTROL
NOT SEL LOCAL MCB IS AVAILABLE LOGIC MCB
IOEC 2-DI 7,13 EXT1 CLOSE COMMAND
COMM.MODULE REMOTE
NOT SEL EXT2
IOEC 2-DI 7,13
COMM.MODULE
11.04 11.05 21.06 21.07 21.08 21.09 21.10
EXT1 EXT2 MCB ON MCB MCB MCB MCB
MCB CONTROL MCB CONTROL CTRL. MODE OPEN SIGNAL AVAILABLE CLOS. TIME LIM OPEN TIME LIM
* for further settings see Signal and Parameter Table
Figure 4-12 Control Signal Diagram of Sequential Macro
4-28 (of 34) 3BHS102768 ACS 1000 User’s Manual, Rev. E
Chapter 4 - I/O Interfaces and Application Macros
4.4.8 Master/Follower Macro
Suitable Applications The Master/Follower Macro is designed for applications with several
ACS1000 drives where the motor shafts are coupled to each other by
gearing, chain, belt etc. Thanks to the Master/Follower Macro the load can
be evenly distributed between the drives or at some adjustable other ratio
which depends on the process.
Description All drive commands and reference settings for a master follower drive
configuration can be given from the control panel of the master drive or
from an external control station connected to the master drive. The
follower drive(s) receive(s) the control signals via a fibre-optic link from the
master drive.
Caution: Connect all control signals to the master drive only. The follower
! must receive all commands exclusively from the master.
Do not control the follower(s) with its (their) own control panel(s). Disable
the control panels of all follower drive(s) by setting parameter 16.02 PA-
RAMETER LOCK to LOCKED to prevent accidental use.
Do not control the follower through a fieldbus system.
Otherwise, the proper functioning of the drive system is affected and the
equipment may even be damaged.
Parameter settings and further information regarding the Master/Follower
Macro can be found in Appendix H - Signal and Parameter Table, para-
meter group 70.
The active control station - control panel or external control station - is
selected by the LOC/REM key on the control panel of the master. The
control panel can be disabled by closing DI 1.8. The digital input can be
accessed via terminals X301:1 and X301:2.
In remote control the reference value is connected to AI 2.1, the start/stop
command is wired to DI 2.1 and the sense of rotation can be changed with
DI 2.2. The default setting for the sense of rotation (parameter 11.03) is
FORWARD. It can be changed to REVERSE either by setting
parameter 11.03 to REVERSE or via DI 2.2 if parameter 11.03 has been
set to REQUEST before (master and follower).
Three constant speeds can be selected via DI 2.5 and DI 2.6 when the
drive is in remote control.
Furthermore, the Master/Follower Macro offers two preset acceleration/
deceleration ramps which can be selected via DI 2.4.
ACS 1000 User’s Manual, Rev. E 3BHS102768 4-29 (of 34)
Chapter 4 - I/O Interfaces and Application Macros
Input Input
power power 1 L -> 600.0 rpm 1
Status Running
Ext. controls Drive link MotSpeed 600.00 rpm
MotCurr 75.0 A
Reference value, start/stop and direction commands are given from
the control panel. To change to EXTERNAL, press LOC REM key.
1 -> 600.0 rpm 1
Status Running
MotSpeed 600.00 rpm
MotCurr 75.0 A
M M
3~
3~
The reference value is read from AI 2.1. Start/stop and direction com-
mands are given through DI 2.1 and DI 2.2.
Motor Motor
MASTER FOLLOWER
Figure 4-13 Master/Follower Macro, Control Overview
Input and Output The default I/O signals of the Master/Follower Macro regarding opening/
Signals closing the MCB, starting/stopping the drive, speed, control location, refer-
ence and actual values are shown in the following table. The corre-
sponding parameters are listed as well. For further settings refer to
Appendix H - Signal and Parameter Table.
Table 4-12 Master/Follower Macro, I/O Signals
Digital Inputs Terminal Parameter Remarks
DI 2.1 START/STOP IOEC 2 11.01 1 = start
X11/1-2 0 = stop
DI 2.2 DIRECTION IOEC 2 11.01 1 = forward
X11/3-4 0 = reverse
DI 2.4 IOEC 2 22.01 Selection of ramp time
ACCEL/DECELERATION RAMP 1/ X11/7-8 0 = ramp time set 1
2 1 = ramp time set 2
DI 2.5 IOEC 2 33.01 Sel1 Sel2 Selection
CONST SPEED SEL 1 X11/9-10
DI 2.6 IOEC 2 33.01 0 0 Analog Ref.
CONST SPEED SEL 2 X12/1-2 1 0 Const. Speed 1
0 1 Const. Speed 2
1 1 Const. Speed 3
DI 1.8 X301 - 0 = control panel is enabled
DISABLE LOCAL X1-2 1 = control panel is disabled
DI 2.8 IOEC 2 16.01 Process stop or run enable
/PROCESS STOP X12/5-6 0 = drive will not start or stop if running
4-30 (of 34) 3BHS102768 ACS 1000 User’s Manual, Rev. E
Chapter 4 - I/O Interfaces and Application Macros
Table 4-12 Master/Follower Macro, I/O Signals (Continued)
DI 2.7 IOEC 2 11.04 Pulse -> 1 = command for closing the main
REMOTE ORD MCB CLOSE X12/3-4 circuit breaker
DI 2.13 IOEC 2 11.04 Pulse -> 1 = command for opening the
REMOTE ORD MCB X13/5-6 main circuit breaker
OPEN
DI 2.9 IOEC 2 21.07 Feedback from MCB
MCB IS OPEN X12/7-8 0 = MCB is open
1 = MCB is closed
The control signal diagrams of the master (see Figure 4-14) and of the
follower (see Figure 4-15) show how the control signals i.e. reference
value, starting/stopping commands, MCB opening/closing commands are
interconnected in the application software of the ACS 1000. Note that the
follower receives all control signals via the fibre-optic link (channel 2, fast
drive link) from the master.
ACS 1000 User’s Manual, Rev. E 3BHS102768 4-31 (of 34)
Chapter 4 - I/O Interfaces and Application Macros
12.06 12.03 33 33.01
EXT. REF2 EXT. REF1 CONSTANT CONST. SPEED
ANAL. INPUTS SELECTION SELECTION SPEEDS SELECTION
IOEC 2: AI1
(REF1) IOEC 2
IOEC 1: AI1 REF1 DI 5,6 SPEED CONTROL CH2
(REF2) EXT1 REMOTE LOOP DDCS LINK
KEYPAD * EXT2
23.01
SPEED REF
NOT SEL LOCAL
CH0
AMC-BOARD 12.01
COMM.MODULE SPEED TO
KEYPAD
CONTROLLER FOLLOWER
REF SEL
REF. VALUE
REF 2 *
REMOTE REF2
KEYPAD (%) 3.09
CTRL. SIGNALS
LOCAL REF1 TORQ REF 2
CH2 (rpm)
DDCS LINK
REF. VALUE
CTRL. SIGNALS
DIG. INPUTS
IOEC 2: DI 1...6 EXT1 TORQUE CONTROL
DI 7,13 REMOTE LOOP
EXT2 26.01
LOCAL TORQ SELECTOR
REF2
(%)
CONTROL REF1
PANEL (rpm) 3.13
TORQ REF USED
REF
LOC
REM
START
START / STOP / DIRECTION
NOT SEL COMM.MODULE
LOCAL NOT USED START/STOP
STOP IOEC 2-DI 1,2
EXT1 REQUEST IOEC2-DI 8
KEYPAD REMOTE DIRECTION
FORWARD
COMM.MODULE EXT2 REVERSE
DIRECTION
NOT SEL
IOEC2-DI 1,2
11.03 16.01
KEYPAD
DIRECTION PROCESS STOP
COMM.MODULE EXT1
11.01 11.02 12.02
PUSH EXT1 EXT2 EXT1/EXT2
BUTTONS STRT/STOP/DIR STRT/STOP/DIR SELECTION
ON
ACS 1000
IOEC 2-DI 9
IOEC 1:
DI 6 MCB Offline MCB IS OPEN
DI 7 MCB Online IOEC 2-DI 10
MCB IS CLOSED MCB
IOEC 2-DI 11 CONTROL
NOT SEL LOCAL MCB IS AVAILABLE LOGIC MCB
IOEC 2-DI 7,13 EXT1 OPEN/CLOSE
COMM.MODULE REMOTE COMMAND
NOT SEL EXT2
IOEC 2-DI 7,13
COMM.MODULE
11.04 11.05 21.06 21.07 21.08 21.09 21.10
EXT1 EXT2 MCB ON MCB MCB MCB MCB
MCB CONTROL MCB CONTROL CTRL. MODE OPEN SIGNAL AVAILABLE CLOS. TIME LIM OPEN TIME LIM
* for further settings see Signal and Parameter Table
Figure 4-14 Control Signal Diagram of Master
4-32 (of 34) 3BHS102768 ACS 1000 User’s Manual, Rev. E
Chapter 4 - I/O Interfaces and Application Macros
12.06 12.03 33 33.01
EXT. REF2 EXT. REF1 CONSTANT CONST. SPEED
ANAL. INPUTS SELECTION SELECTION SPEEDS SELECTION 70.17
FOLL SPEED
IOEC 2: AI1
REF
(REF1)
IOEC 1: AI1 REF1
(REF2) EXT1 REMOTE SPEED CONTROL
KEYPAD * EXT2
FOLLOWER LOOP
122.19
NOT SEL LOCAL
CH0 MASTER NR
AMC-BOARD
COMM.MODULE 12.01
REF. VALUE
REF 2 * KEYPAD
REF SEL
REMOTE
REF2
KEYPAD (%)
CTRL. SIGNALS
LOCAL REF1
CH2
(rpm)
DDCS LINK
REF. VALUE 70.18
70.08
CH2 M/F MODE FOLL TORQ
CTRL. SIGNALS REF
DIG. INPUTS NOT IN USE
IOEC 2: DI 1...6 MASTER TORQUE CONTROL
DI 7,13 FOLLOWER FOLLOWER LOOP
122.21
MASTER TORQ REF A
CONTROL
PANEL
REF
LOC
REM
START
START / STOP / DIRECTION
NOT SEL COMM.MODULE
LOCAL NOT USED START/STOP
STOP IOEC 2-DI 1,2
EXT1 REQUEST IOEC2-DI 8
KEYPAD REMOTE FORWARD DIRECTION
COMM.MODULE EXT2 REVERSE
DIRECTION
NOT SEL
IOEC2-DI 1,2
11.03 16.01
KEYPAD
DIRECTION PROCESS STOP
COMM.MODULE
11.01 11.02 12.02
PUSH EXT1 EXT2 EXT1/EXT2
BUTTONS STRT/STOP/DIR STRT/STOP/DIR SELECTION
ON
ACS 1000
IOEC 2-DI 9
IOEC 1:
DI 6 MCB Offline MCB IS OPEN
DI 7 MCB Online IOEC 2-DI 10
MCB IS CLOSED MCB
IOEC 2-DI 11 CONTROL
NOT SEL LOCAL MCB IS AVAILABLE LOGIC MCB
IOEC 2-DI 7,13 EXT1 OPEN/CLOSE
COMM.MODULE REMOTE COMMAND
NOT SEL EXT2
IOEC 2-DI 7,13
COMM.MODULE
11.04 11.05 21.06 21.07 21.08 21.09 21.10
EXT1 EXT2 MCB ON MCB MCB MCB MCB
MCB CONTROL MCB CONTROL CTRL. MODE OPEN SIGNAL AVAILABLE CLOS. TIME LIM OPEN TIME LIM
* for further settings see Signal and Parameter Table
Figure 4-15 Control Signal Diagram of Follower
ACS 1000 User’s Manual, Rev. E 3BHS102768 4-33 (of 34)
Chapter 4 - I/O Interfaces and Application Macros
4.4.9 User 1 and User 2 Macro
Each of these two macros allows to save a complete customized param-
eter set and to recall it at a later instant.
4-34 (of 34) 3BHS102768 ACS 1000 User’s Manual, Rev. E
Chapter 5 - Parameter Viewing and Editing and Control
Panel Functions
5.1 Overview
This chapter describes the functions of the CDP 312 control panel and
offers instructions for setting parameters, calling up and displaying actual
values and messages and entering start and stop commands and setpoint
values.
Note: The panel display messages shown in this chapter are typical
examples for illustrating the related instructions and display functions.
They may differ from the actual messages in your system.
Some parameter settings mentioned in this chapter may not match with
those in your drive. If in doubt, refer to Appendix H - Signal and Parameter
Table.
5.1.1 Safety Instructions
Caution: Parameters and application macros are set during commis-
! sioning of the drive system and must not be changed afterwards.
Running the ACS 1000, the motor and the equipment being driven with
incorrect data can result in improper operation, reduction in control accu-
racy and damage to equipment.
Only qualified and certified personnel shall operate the drive system, i.e.
personnel who are familiar with the machine and the operation of the drive
system and the hazards involved and who have aquired the certificate
after having attended the ABB service training.
Note: Before starting work on the ACS 1000 the general safety instruc-
tions in Chapter 1 - Safety Instructions must be read and understood.
5.2 The CDP 312 Control Panel
The detachable control panel (see Figure 5-1) on the front door of the
converter is the basic user interface for:
• Viewing and setting parameters
• Monitoring the operation of the ACS 1000
ACS 1000 User’s Manual, Rev. E 3BHS102768 5-1 (of 22)
Chapter 5 - Parameter Viewing and Editing and Control Panel Functions
• Entering start and stop commands
• Setting the reference value
• Troubleshooting.
The control panel can be connected and disconnected while the drive is
operating.
For information on other possibilities for programming or troubleshooting
see Chapter 3 - Design and Functional Description, PC Tools, page 3 - 18.
For more information on starting and stopping see Chapter 8 - Operation.
Enclosure class IP54 when attached to the
Control Panel Mounting Platform
Multilingual Alphanumeric Display
(4 lines x 20 characters)
1 L ->1242,0rpm I Plain text messages in 10 available languages
Control MotCurr 76.00 A Depending on the selected Application Soft-
Panel MotSpeed 1242.0rpm ware, several languages are loaded in the
Torque 86.00 % ACS 1000.
Display
ACT PAR FUNC DRIVE
Control Panel Mode Selection keys
Double Up Arrow, Up Arrow,
ENTER Enter,
Double Down Arrow, Down Arrow keys
Control LOC RESET REF
Local/Remote, Reset, Reference and
Panel REM Start keys
Keypad
Forward, Reverse and Stop keys
Figure 5-1 CDP 312 control panel
5.2.1 Overview of Panel Funtions
Keypad Modes The CDP 312 control panel has the following keypad modes:
• Identification mode
• Actual Signal Display mode, selected by the ACT key
• Parameter mode, selected by the PAR key
• Function mode, selected by the FUNC key
• Drive Selection mode, selected by the DRIVE key.
5-2 (of 22) 3BHS102768 ACS 1000 User’s Manual, Rev. E
Chapter 5 - Parameter Viewing and Editing and Control Panel Functions
The Drive Selection mode is not used in a standard single-drive applica-
tion and therefore not explained in this chapter.
ID-number of the Panel status Rotation direction Reference Run status
selected drive “L” = Local “->“ = Forward value I = Run
“ “ = Remote “<-” = Reverse 0 =Stop
Actual Signal Display Mode
Status line
1 L -> 600.0 rpm 1
Status Running Act. signal/fault history
Actual signal ACT selection
names and MotSpeed 600.00 rpm
values
MotCurr 80.0 % Act. signal/fault message
scrolling
Enter selection mode
ENTER Accept new signal
Parameter Mode
Status line 1 L -> 600.0 rpm 0
Group number
and name
75 OPTION MODULES PAR
Group selection
Parameter Number 01 IOEC3 OptionBoard Fast value change
and name
Parameter value YES Parameter selection
Slow value change
Enter change mode
ENTER Accept new value
Function Mode
Status line 1 L -> 600.0 rpm 0
Selectable UPLOAD <= <= FUNC Row selection
functions
DOWNLOAD => =>
CONTRAST 4 ENTER Function start
Drive Selection Mode
Status line ACS 1000 9133WR
Device type Device name Drive selection
DRIVE
Drive ID-number MSAC300B 1006 ID number change
Total number of
drives in the link ID-NUMBER 1 Enter change mode
ENTER Accept new value
Figure 5-2 Control Panel Display and Function of Control Panel Keys
LOC
REM
Keypad / external control Forward Start
RESET
Fault reset Reverse Stop
REF
Setpoint setting function
Figure 5-3 Operational Control Panel Keys
ACS 1000 User’s Manual, Rev. E 3BHS102768 5-3 (of 22)
Chapter 5 - Parameter Viewing and Editing and Control Panel Functions
5.2.2 Identification Mode
After the drive has been energized or after the panel has been connected
to the converter for which the auxiliary voltage has been switched on
already, the identification display appears showing the panel version and
then the ID-number of the drive. When the control panel is being initialized
the display changes as follows:
CDP312 PANEL
........
After 2-3 seconds:
ACS 1000 xxxx
< Device Name >
ID-NUMBER 1
After another few seconds, the display changes to the Actual Signal
Display mode.
1 L -> 550.0 rpm 0
Status Rdy MCB On
MotSpeed 0.00 rpm
MotCurr 0.0 A
5.2.3 Actual Signal Display Mode
Two displays can be selected in the Actual Signal Display mode:
• Actual Signal Display
• Fault History Display.
The Actual Signal Display appears first when the Actual Signal Display
mode has been selected. However, if the drive is in a fault condition, the
Fault Display will be shown instead.
The Actual Signal Display is used to monitor the ACS 1000 without inter-
ferring the operation of the drive.Three preselectable actual values are
shown continuously on the display.
The panel will automatically return to the Actual Signal Display mode from
other modes within one minute, if no keys are pressed (exceptions: Status
Display and Common Reference Display in Drive Selection mode and
Fault Display mode).
5-4 (of 22) 3BHS102768 ACS 1000 User’s Manual, Rev. E
Chapter 5 - Parameter Viewing and Editing and Control Panel Functions
A complete list of selectable actual signals can be found in Appendix H -
Signal and Parameter Table, parameter groups 1-9.
The fault memory includes information on the 40 most recent fault events
that occurred in the ACS 1000. In case of a power failure the sixteen most
recent messages remain in the fault memory. The name of the fault and
the total elapsed time are displayed. The procedure for selecting and
clearing the fault history is described in Table 5-3.
When a fault or warning is generated in the drive, the message will be
displayed immediately, except if in Drive Selection mode.
It is possible to change from the Fault Display mode to other display
modes without resetting the fault. If no keys are pressed the fault or
warning text is displayed as long as the fault is pending.
The Actual Signal Display mode is selected by pressing the ACT key.
1 L -> 550.0 rpm 0
ACT Status Rdy MCB On
MotSpeed 0.00 rpm
MotCurr 0.0 A
When in Actual Signal Display mode, the fast UP/DOWN keys allow to
toggle between Actual Signal Display and Fault History Display.
1 L -> 550.0 rpm 0
1 LAST FAULT
Overspeed
001231 12:30:02.3256
Table 5-1 Displaying Three Actual Signals
Step Function Press key Display
1. to display the full name of HOLD
the three actual signals 1 L -> 550.0 rpm 1
ACT
DriveStatusWord
MotorSpeedFilt
MotorCurrent
2. to return to the Actual RELEASE
Signal Display mode 1 L -> 550.0 rpm 1
ACT
Status ErthIsoClos
MotSpeed 550.00 rpm
MotCurr 75.0 A
ACS 1000 User’s Manual, Rev. E 3BHS102768 5-5 (of 22)
Chapter 5 - Parameter Viewing and Editing and Control Panel Functions
Table 5-2 Selecting Actual Signals
Step Function Press key Display
1. to enter the Actual Signal
Display mode 1 L -> 550.0 rpm 0
ACT
Status ErthIsoClos
MotSpeed 0.00 rpm
MotCurr 0.0 A
2. to select a row where the
actual signal is to be 1 L -> 550.0 rpm 0
displayed (a blinking Status ErthIsoClos
cursor indicates the MotSpeed 0.00 rpm
selected row) MotCurr 0.0 A
3. to enter the actual signal
selection function 1 L -> 550.0 rpm 0
1 ACTUAL SIGNALS
ENTER
07 MotorCurrent
0.0 A
4. to select a parameter
group 1 L -> 550.0 rpm 0
2 ACTUAL SIGNALS
01 ControlMode
SPEED-CTRL
5. to select an actual signal
1 L -> 550.0 rpm 0
2 ACTUAL SIGNALS
12 InvEarthCurrent
0.0 A
6.a to accept the selection
and to return to the 1 L -> 550.0 rpm 0
Actual Signal Display Status ErthIsoClos
ENTER
mode MotSpeed 0.00 rpm
InvErCur 0.0 A
6.b to cancel the selection
and keep the original ACT PAR 1 L -> 550.0 rpm 0
selection, press any of Status ErthIsoClos
the mode keys MotSpeed 0.00 rpm
FUNC DRIVE MotCurr 0.0 A
the selected keypad
mode is entered
5-6 (of 22) 3BHS102768 ACS 1000 User’s Manual, Rev. E
Chapter 5 - Parameter Viewing and Editing and Control Panel Functions
Table 5-3 Displaying a Fault and Resetting Fault History
Step Function Press key Display
1. to enter the Actual
Signal Display mode 1 L -> 550.0 rpm 0
ACT
Status ErthIsoClos
MotSpeed 0.00 rpm
MotCurr 0.0 A
2. to enter the Fault
History Display 1 L -> 550.0 rpm 0
1 LAST FAULT
+Panel Lost
980226 12:30:02.3256
3. to select the previous
(UP) or next fault 1 L -> 550.0 rpm 0
(DOWN) 2 Last Fault
Speed Ref Lost
980224 10:45:32.0705
to clear the fault history 1 L -> 550.0 rpm 0
RESET 1 Last Fault
The fault history is
empty H Min S
4. to return to the Actual
Signal Display mode 1 L -> 550.0 rpm 0
Status ErthIsoClos
MotSpeed 0.00 rpm
MotCurr 0.0 A
Table 5-4 Displaying and Resetting an Active Fault
Step Function Press Key Display
1. to display an active fault
1 L -> 550.0 rpm 0
ACT
ACS 1000 9133WR
*** FAULT ***
Panel Lost
2. to reset the fault
1 L -> 550.0 rpm 0
RESET
Status ErthIsoClos
MotSpeed 0.00 rpm
MotCurr 0.0 A
ACS 1000 User’s Manual, Rev. E 3BHS102768 5-7 (of 22)
Chapter 5 - Parameter Viewing and Editing and Control Panel Functions
5.2.4 Parameter Mode
Parameters allow the ACS 1000 to be configured and set-up specifically
for an application.
Initially, the parameters are adjusted by the ABB commissioning engineer
in cooperation with the user. Especially if options are added, the corre-
sponding parameters must be checked and, if necessary, adjusted.
Parameters in the ACS 1000 are organized in functional groups. All
control functions are represented by a parameter group and can be acti-
vated and set-up individually.
Information on control functions can be found in Chapter 3 - Design and
Functional Description. A complete list of all parameter groups is attached
in Appendix H - Signal and Parameter Table. For examples on parameter
settings see Examples of Parameter Settings, page 5-14.
Motor Parameters Parameter values which are characteristic for the motor in use are deter-
mined automatically (identification run) and cannot be changed by the
user.
Start-up Parameters The start-up parameters (parameter group 99), which comprise settings
for the control-panel language, the motor nominal data, the drive ID
number and the application macros must be determined and entered for
each drive.
Caution: If wrong parameter values are set, the proper functioning of the
! drive system can be affected and the equipment may even be damaged.
Do not change any parameter if the meaning of the parameter and the
effects of the change are not fully understood.
Start-up and motor parameters must either be set by an ABB engineer or
by certified personnel, who have acquired the certificate by having
attended the ABB service training.
If in doubt always contact the ABB representative or the ABB logistic
center.
Selecting Parameters The Parameter mode is used to check and change the ACS 1000 param-
eters. When this mode is entered for the first time after the auxiliary
voltage of the drive has been switched on, the display will show the first
parameter of parameter group 11. The next time, the Parameter mode is
entered, the previously selected parameter is shown.
Note: Some parameter values cannot be changed while the drive is
running.
5-8 (of 22) 3BHS102768 ACS 1000 User’s Manual, Rev. E
Chapter 5 - Parameter Viewing and Editing and Control Panel Functions
If tried, the following warning will be displayed:
** Warning **
Write Access Denied
Parameter Setting
Not Possible
Table 5-5 Selecting a Parameter and Changing the Value
Step Function Press key Display
1. to enter the Parameter
mode 1 L -> 550.0 rpm 0
PAR
75 OPTION MODULES
01 IOEC3 OptionBoard
YES
2. to select a different
group 1 L -> 550.0 rpm 0
75 OPTION MODULES
01 IOEC3 OptionBoard
YES
3. to select a parameter
1 L -> 550.0 rpm 0
75 OPTION MODULES
02 IOEC4 OptionBoard
NO
4. to enter the parameter
setting function 1 L -> 550.0 rpm 0
75 OPTION MODULES
ENTER
02 IOEC4 OptionBoard
[NO]
5. to change the parameter
value 1 L -> 550.0 rpm 0
(slow change for 75 OPTION MODULES
numbers and text) 02 IOEC4 OptionBoard
(fast change for numbers [Yes]
only)
6.a to accept the selection
and to return to the 1 L -> 550.0 rpm 0
Actual Signal Display 75 OPTION MODULES
ENTER
mode 02 IOEC4 OptionBoard
Yes
ACS 1000 User’s Manual, Rev. E 3BHS102768 5-9 (of 22)
Chapter 5 - Parameter Viewing and Editing and Control Panel Functions
Table 5-5 Selecting a Parameter and Changing the Value (Continued)
Step Function Press key Display
6.b to cancel the setting and
keep the original ACT PAR
1 L -> 550.0 rpm 0
selection, press any of 75 OPTION MODULES
the mode keys 02 IOEC4 OptionBoard
FUNC DRIVE NO
the selected keypad
mode is entered
5.2.5 Function Mode
Setting the Contrast In the ACS 1000 the Function mode is used to set the contrast of the
display.
Table 5-6 Setting the Contrast of the Panel Display
Step Function Press Key Display
1. to enter the Function
mode 1 L -> 0.0 rpm 0
FUNC
UPLOAD <= <=
DOWNLOAD => =>
CONTRAST 4
2. to select a function (a
blinking cursor indicates 1 L -> 0.0 rpm 0
the selected function) UPLOAD <= <=
DOWNLOAD => =>
CONTRAST 4
3. to enter the contrast
setting function 1 L -> 0.0 rpm 0
CONTRAST [4]
ENTER
4. to set the contrast
1 L -> 0.0 rpm 0
CONTRAST [6]
5.a to accept the selection
and to return to the 1 L -> 0.0 rpm 0
Actual Signal Display UPLOAD <= <=
ENTER
mode DOWNLOAD => =>
CONTRAST 6
5-10 (of 22) 3BHS102768 ACS 1000 User’s Manual, Rev. E
Chapter 5 - Parameter Viewing and Editing and Control Panel Functions
Table 5-6 Setting the Contrast of the Panel Display (Continued)
Step Function Press Key Display
5.b to cancel the setting
and keep the original ACT PAR
1 L -> 0.0 rpm 0
selection, press any of UPLOAD <= <=
the mode keys DOWNLOAD => =>
FUNC DRIVE CONTRAST 4
the selected keypad
mode is entered
5.2.6 Operational Functions
Local / Remote Control The ACS 1000 can receive operational commands via the control panel
and the pushbuttons on the front door or via remote control stations. The
local or remote control location is selected via the LOC/REM key on the
control panel.
1 L -> 550.0 rpm
LOC
Status Running
REM MotSpeed 550.00 rpm
MotCurr 75.0 A
If LOCAL is selected, the commands for closing and opening the main
circuit breaker (MCB) are entered via the pushbuttons on the front door.
The commands for starting and stopping, for changing the direction and
the setpoint are entered on the control panel. In LOCAL mode no remote
command via digital inputs or a serial interface is accepted.
If REMOTE is selected, all control signals (MCB close/open, ACS 1000
start/stop, setpoint) come from one or two external control stations.The
operational commands are connected to digital inputs and up to two
setpoints are connected to analog inputs. As an alternative, the remote
control signals can be transmitted via a serial communication interface.
In remote control mode the ACS 1000 can also be operated via the control
panel and the pushbuttons on the front door, if the corresponding para-
meters are set to KEYPAD:
• Parameter 11.01 EXT1 STRT/STOP/DIR for external control station
1 and/or parameter 11.02 EXT2 STRT/STOP/DIR for control station 2
• Parameter 12.06 EXT REF2 SELECT.
For more information on LOCAL/REMOTE parameter settings see
Chapter 4 - I/O Interfaces and Application Macros, Chapter 8 - Operation
and Appendix H - Signal and Parameter Table.
Changing from LOCAL to REMOTE and vice versa is possible while the
ACS 1000 is running.
Changing from LOCAL to REMOTE:
ACS 1000 User’s Manual, Rev. E 3BHS102768 5-11 (of 22)
Chapter 5 - Parameter Viewing and Editing and Control Panel Functions
• The motor does not stop if the external operational commands (MCB
close/open and ACS 1000 start/stop) from the remote control station
are set correctly.
• The speed follows the actual reference value at the analog input. If
there is a difference between the actual speed and the speed refer-
ence value, the speed follows a pre-set ramp until the actual refer-
ence value is reached.
Changing from REMOTE to LOCAL:
• The motor does not stop.
• The speed does not change (initial value for nref is the last actual
speed) which can now be changed via the CDP 312 control panel.
Disable Local LOCAL operation can be disabled via digital input DI 1.8 DISABLE LOCAL
on IOEC board 1. The digital input is accessible via terminals X301:1 and
2. If the input is set to high and REMOTE is selected on the control panel,
it is not possible to select LOCAL. This function is important when acci-
dental commands via the control panel must be prevented because the
ACS 1000 is operated via a remote control station.
Note: If the control panel is in LOCAL mode when DI 1.8 DISABLE LOCAL
is set to high, the LOCAL mode will not be disabled! Only after REMOTE
has been selected again, it is not possible to change to LOCAL.
Changing the Control
Location Table 5-7 Changing the Control Location
Step Function Press Key Display
1. to select local control
1 L-> 550.0 rpm 1
LOC Status Running
(the local control location
is indicated by the letter L) REM MotSpeed 550.00 rpm
MotCurr 115.0 A
2. to remote local control
1 -> 550.0 rpm 1
LOC Status Running
(the remote control
location is indicated by a REM MotSpeed 550.00 rpm
blank) MotCurr 115.0 A
Entering Start and Stop The control panel can be used to start ( ) and stop ( ) the drive.
Commands Therefore, the control panel must be
• in LOCAL mode
or
• if REMOTE is selected, parameter 11.01 EXT1 STRT/STOP/DIR or
parameter 11.02 EXT2 STRT/STOP/DIR must be set to KEYPAD.
5-12 (of 22) 3BHS102768 ACS 1000 User’s Manual, Rev. E
Chapter 5 - Parameter Viewing and Editing and Control Panel Functions
More information on starting and stopping can be found in Chapter 4 - I/O
Interfaces and Application Macros, Chapter 8 - Operation and Appendix H
- Signal and Parameter Table.
Setting the Sense of The sense of rotation is selected on the control panel using the key
Rotation for forward direction and the key to reverse the direction. Both keys
can be used, if:
• the control panel is in LOCAL mode
and
• parameter 11.3 DIRECTION is set to REQUEST.
Parameter 11.3 provides 3 settings:
• FORWARD
• REVERSE
• REQUEST.
If parameter 11.3 is set to FORWARD or REVERSE, the sense if rotation
is fixed to the selected direction and cannot be changed using the and
key (see also Appendix H - Signal and Parameter Table).
An arrow on the display indicates the direction:
• If the motor is running, the arrow indicates the actual sense of rota-
tion.
• If the motor is not running, the arrow indicates the preselected sense
of rotation.
In the example below, reverse direction is shown.
1 L <- 550.0 rpm 1
Status Running
MotSpeed 550.00 rpm
MotCurr 80.0 A
When the sense of rotation is changed while the motor is running, the
speed will automatically ramp to zero and the motor will accelerate in
opposite direction to the preset speed. The direction of the arrow on the
display changes to the new sense of rotation, if the motor has reached
zero speed.
For more information see Chapter 8 - Operation.
Setting a Setpoint Before a setpoint can be changed via the control panel, select LOCAL by
pressing the LOC/REM key. The setpoint can then be changed at any
time.
ACS 1000 User’s Manual, Rev. E 3BHS102768 5-13 (of 22)
Chapter 5 - Parameter Viewing and Editing and Control Panel Functions
Table 5-8 Setting a Setpoint
Step Function Press Key Display
1. to enter a keypad mode
displaying the status ACT PAR 1 L -> 600.0 rpm 1
row, press a mode key Status Running
FUNC
MotSpeed 600.00 rpm
MotCurr 75.0 A
2. to enter the Setpoint
Setting function 1 L ->[ 600.0 rpm]1
REF Status Running
MotSpeed 600.00 rpm
MotCurr 75.0 A
3. to change the setpoint
1 L ->[ 550.0 rpm]1
(slow change) Status Running
MotSpeed 550.00 rpm
(fast change) MotCurr 75.0 A
4. to exit the Setpoint
Setting mode, press any ACT PAR
1 L -> 550.0 rpm 1
of the mode keys Status Running
MotSpeed 550.00 rpm
the selected keypad FUNC DRIVE MotCurr 75.0 A
mode is entered
5.3 Examples of Parameter Settings
This chapter provides examples with detailed instructions on how to
proceed when individual parameters for particular functions need to be
checked and set after the ACS 1000 has been started up.
5.3.1 Selection of Application Macros
An application macro consists of a default set of parameters that is
adapted for a specific application. It offers pre-set signal interfaces for
opening/closing the main circuit breaker, starting/stopping the drive
system, setting reference values and other functions.
The default values can be left unchanged or they can be set individually
according to the needs of the user. In order to optimize the ACS 1000 for
a specific configuration, it is recommended to check, if the default settings
match the requirements and, if necessary, to customize the settings where
appropriate.
Overview of Application The application macros are selected in parameter group 99 (start-up
Macros data). An overview of available application macros is given in Table 5-9.
Not included in the table are the User Macros 1 and 2. Instructions on how
5-14 (of 22) 3BHS102768 ACS 1000 User’s Manual, Rev. E
Chapter 5 - Parameter Viewing and Editing and Control Panel Functions
to work with user macros can be found in section Creating a User Macro,
page 5-17.
Table 5-9 Available Application Macros
Macro Selection
Factory FACTORY
Hand/Auto HAND/AUTO
PID Control PID-CTRL
Torque Control TORQUE-
CTRL
Sequential Control SEQ-CTRL
Master/Follower M/F-CTRL
Speed Control SPEED-CTRL
For detailed descriptions of application macros refer to Chapter 4 - I/O
Interfaces and Application Macros, Application Macros, page 4 - 10 or
contact the ABB representative or the ABB logistic center for assistance.
Selecting an
Application Macro
Caution: Do not change any parameter if the meaning of the parameter
! and the effects of the change are not fully understood.
To select an application macro proceed as follows:
1 Select the Parameter mode by pressing the PAR key.
Then the Parameter mode display appears, showing the
previously selected parameter group and parameter
setting.
1 L -> 600.0 rpm 0
PAR 11 START/STOP/DIR
01 Ext1Strt/Stop/Dir
DI1,2
2 Select parameter group 99 using the fast UP/DOWN keys.
1 L -> 600.0 rpm 0
99 START-UP DATA
01 Language
ENGLISH
ACS 1000 User’s Manual, Rev. E 3BHS102768 5-15 (of 22)
Chapter 5 - Parameter Viewing and Editing and Control Panel Functions
3 Select parameter 99.13 APPLICATION MACRO using the slow UP/
DOWN keys.
1 L -> 600.0 rpm 0
99 START-UP DATA
13 ApplicationMacro
FACTORY
4 Press ENTER.
1 L -> 600.0 rpm 0
ENTER 99 START-UP DATA
13 ApplicationMacro
[FACTORY]
5 Select an application macro using the slow UP/DOWN keys.
Refer to Table 5-9 for a list of available application
macros.
1 L -> 600.0 rpm 0
99 START-UP DATA
13 ApplicationMacro
[HAND/AUTO]
6 Press ENTER to save and activate the selected application macro.
1 L -> 600.0 rpm 0
ENTER 99 START-UP DATA
13 ApplicationMacro
HAND/AUTO
The new application macro with all its related parameter
settings (default settings) is now active.
If the new setting is not to be saved, do not press
ENTER. If instead any one of the other mode keys is
pressed the previous setting will be reinstated.
Note: Each time an application macro is activated, the previously set
parameters will be overwritten by the default values of the macro.
The settings in parameter group 99 (start-up data), which is common to all
standard macros, will also be replaced by the default values of the macro.
5-16 (of 22) 3BHS102768 ACS 1000 User’s Manual, Rev. E
Chapter 5 - Parameter Viewing and Editing and Control Panel Functions
Note: After the parameter values of a standard macro have been
changed, the new settings will be stored into the Flash PROM of the
ACS 1000. They become active immediately and stay active, if the auxil-
iary voltage of the ACS 1000 is switched off and on again. However, the
factory set default values of each standard macro are still available and
they can be restored (see section Restoring Default Settings, page 5-21).
7 Press any of the mode keys to exit the Parameter mode.
5.3.2 User Macros
In addition to the standard application macros, it is possible to create two
user macros. These allow the user to save the complete set of parameters
of a drive, including group 99 (start-up data) and the automatically (identi-
fication run) calculated motor parameters in the Flash PROM of the
ACS 1000 and to recall it at a later time.
Example: Using macros it is possible to switch the ACS 1000 between
two motors (e.g. main and replacement motor) without having to adjust the
start-up data and to repeat the identification run every time the motor is
changed. All parameters can be determined once and be saved in two
user macros afterwards. When a motor is changed, only the corre-
sponding user macro needs to be loaded and the drive is ready to operate.
Caution: Running the ACS 1000, the motor and the equipment being
! driven with incorrect data can result in improper operation, reduction in
control accuracy and damage to equipment.
After a User macro has been loaded, it needs to be checked, that the
parameter settings correspond to the motor in use.
If a User macro is loaded, all actual parameters including parameter group
99 (start-up data) and the motor parameters will be overwritten by the
parameter settings of the macro.
Note: After a User macro has been loaded and parameters are changed,
the complete set of parameters must be saved in the User macro again, if
the changes are to become part of the user macro.
Creating a User Macro Proceed as follows to create a User macro:
1 Select the Parameter mode by pressing the PAR key.
ACS 1000 User’s Manual, Rev. E 3BHS102768 5-17 (of 22)
Chapter 5 - Parameter Viewing and Editing and Control Panel Functions
Then the Parameter mode display appears, showing the
previously selected group and parameter.
1 L -> 600.0 rpm 0
PAR 75 OPTION MODULES
02 IOEC4 OptionBoard
NO
2 Select parameter group 99 using the fast UP/DOWN keys.
1 L -> 600.0 rpm 0
99 START-UP DATA
11 ApplicationRestore
NO
3 Select parameter 99.13 APPLICATION MACRO using the slow UP/
DOWN keys.
1 L -> 600.0 rpm 0
99 START-UP DATA
13 ApplicationMacro
FACTORY
4 Press ENTER.
1 L -> 600.0 rpm 0
ENTER 99 START-UP DATA
13 ApplicationMacro
[FACTORY]
5 Select USER 1 SAVE or USER 2 SAVE using the slow UP/DOWN
keys.
1 L -> 600.0 rpm 0
99 START-UP DATA
13 ApplicationMacro
[USER 1 SAVE]
5-18 (of 22) 3BHS102768 ACS 1000 User’s Manual, Rev. E
Chapter 5 - Parameter Viewing and Editing and Control Panel Functions
6 Press ENTER to save the selection.
1 L -> 600.0 rpm 0
ENTER 99 START-UP DATA
13 ApplicationMacro
USER 1 SAVE
Saving will take a few minutes.
7 To exit the Parameter mode press any one of the other mode keys
Recalling User Macro In order to recall the parameters saved in the User macro proceed as
Parameters described above. In step 5 select USER 1 LOAD or USER 2 LOAD instead
of USER 1 SAVE or USER 2 SAVE.
5.3.3 Selection of IOEC 3 and IOEC 4
If the optional IOEC board 4 has been installed in the ACS 1000 the proce-
dure to activate the board, is described in this section.
Note: IOEC board 3 is a standard I/O board in the water-cooled ACS 1000
converters and does not need to be activated.
1 Select the Parameter mode by pressing the PAR key.
Then the display changes to the Parameter mode,
showing the previously selected group and parameter
setting.
1 L -> 600.0 rpm 0
PAR 11 START/STOP/DIR
01 Ext1Strt/Stop/Dir
DI1,2
2 Select the parameter group 75 using the fast UP/DOWN keys.
1 L -> 600.0 rpm 0
75 OPTION MODULES
01 IOEC3 OptionBoard
YES
ACS 1000 User’s Manual, Rev. E 3BHS102768 5-19 (of 22)
Chapter 5 - Parameter Viewing and Editing and Control Panel Functions
3 Select the parameter to be changed using the slow UP/DOWN keys.
1 L -> 600.0 rpm 0
75 OPTION MODULES
02 IOEC4 OptionBoard
NO
4 Press ENTER.
1 L -> 600.0 rpm 0
ENTER 75 OPTION MODULES
2 IOEC4 OptionBoard
[No]
5 Change the parameter setting using the slow UP/DOWN keys. The
fast UP/DOWN keys are for numeric values only.
1 L -> 600.0 rpm 0
75 OPTION MODULES
02 IOEC4 OptionBoard
[Yes]
6 Press ENTER to save the new setting.
1 L -> 600.0 rpm 0
ENTER 75 OPTION MODULES
02 IOEC4 OptionBoard
Yes
If the new setting is not to be saved, do not press ENTER. If instead
any one of the other mode keys is pressed the previous setting will be
reinstated.
7 Press any one of the other mode keys to exit the Parameter mode af-
ter the new parameter entry has been saved.
5.3.4 Parameter Lock
Unwanted parameter entry can be prevented by activating the Parameter
Lock function which is part of group 16 SYSTEM CTR INPUTS.
The Parameter Lock is activated by setting parameters 16.02 and 16.03
accordingly. The user pass code can be changed by setting parameters
16.04 and 16.05. For more details see Appendix H - Signal and Parameter
Table. Follow the instructions in section Parameter Mode, page 5-8 to
change the parameter settings.
5-20 (of 22) 3BHS102768 ACS 1000 User’s Manual, Rev. E
Chapter 5 - Parameter Viewing and Editing and Control Panel Functions
To activate the Parameter Lock:
1 Select parameter 16.02 PARAMETER LOCK
2 Set parameter 16.02 to LOCKED
3 Save the setting and exit the Parameter mode
To open the Parameter Lock:
1 Select parameter 16.03 PASS CODE
2 Set the correct pass code. If not known, see Appendix H - Signal and
Parameter Table for details
3 Save the setting and exit the Parameter mode.
5.3.5 Restoring Default Settings
1 Select the Parameter mode by pressing the PAR key.
Then, the Parameter mode display appears, showing
the previously selected group and parameter.
1 L -> 600.0 rpm 0
PAR 75 OPTION MODULES
02 IOEC4 OptionBoard
NO
2 Select parameter group 99 using the fast UP/DOWN keys.
1 L -> 600.0 rpm 0
99 START-UP DATA
13 ApplicationMacro
FACTORY
3 Select parameter 99.11 APPLIC RESTORE using the slow
UP/DOWN keys.
1 L -> 600.0 rpm 0
99 START-UP DATA
11 ApplicationRestore
NO
ACS 1000 User’s Manual, Rev. E 3BHS102768 5-21 (of 22)
Chapter 5 - Parameter Viewing and Editing and Control Panel Functions
4 Press ENTER.
1 L -> 600.0 rpm 0
ENTER 99 START-UP DATA
11 ApplicationRestor
[NO]
5 Select YES using the slow UP/DOWN keys.
1 L -> 600.0 rpm 0
99 START-UP DATA
11 ApplicationRestor
[YES]
6 Press ENTER to save the selection. The default settings for the active
application macro are restored.
1 L -> 600.0 rpm 0
ENTER 99 START-UP DATA
11 ApplicationRestor
YES
5-22 (of 22) 3BHS102768 ACS 1000 User’s Manual, Rev. E
Chapter 6 - Installation
6.1 Overview
This chapter provides information on the mechanical and electrical instal-
lation of the ACS 1000. The instructions include cabinet mounting,
grounding, mains, motor and control connections. For information on
optional modules and other extras installed in the drive refer to Appendix
B - Customer Specific Options.
For installation instructions of motor, transformer and other equipment
refer to the relevant manuals.
6.2 Safety Instructions
Note: Before starting work on the ACS 1000 the general safety instruc-
tions in Chapter 1 - Safety Instructions must be read and understood.
Danger: The ACS 1000 is a high voltage device.
When located, installed and connected in accordance with the instructions
given in this manual, the device is safe.
When misused it can lead to life-threatening physical injury or death.
Keep strictly to the following instructions:
• All electrical and mechanical installation work on the ACS 1000 must
be carried out by qualified personnel in compliance with local regula-
tions.
• Any installation work must be done with mains and auxiliary power
off. Input and output isolators must be open and secured, any adjoin-
ing grounding device must be closed and power cables must be
grounded.
• Power must not be applied to the drive system without the consent of
the ABB commissioning staff.
ACS 1000 User’s Manual, Rev. E 3BHS102768 6-1 (of 26)
Chapter 6 - Installation
6.3 Mechanical Installation
6.3.1 Installation Site Requirements
In general, the installation site should be even, clean and dry and the front
doors of the drive cabinet should open easily. The installation site should
be easily accessible and appropriate transportation aids should be avail-
able before installation is started.
When planning the installation of the ACS 1000, ambient conditions
regarding
• Ambient temperature
• Humidity
• Contamination levels
• Vibration levels
must be considered. See Appendix A - Technical Data for limit values.
Note: If the installation site conditions are not within the specifications or
if transportation or installation require special measures, contact the ABB
representative or the factory.
Base Dimensions and For drive dimensions see drawing Dimensions and floor mounting in
Clearances Appendix E - Layout and Mechanical Drawings.
All units must be mounted with adequate free space provided in accor-
dance with Table 6-1. Dimensions are given in mm with equivalent inches
in brackets.
Table 6-1 ACS 1000 Clearances
Above (1)(3) Below (1) Left / Right (1) Front (2) Back
700 (27.5) 0 (0) 0 (0) 1000 (39.4) 0 (0)
Notes:
1 Dimensions listed do neither include space for mov-
ing the cabinet, nor for cable and water entries.
2 Dimensions listed indicate maximum necessary door
swing area. Additional space may be needed to fulfill
local regulations.
3 Dimensions are above the optional redundant fan
unit.
6-2 (of 26) 3BHS102768 ACS 1000 User’s Manual, Rev. E
Chapter 6 - Installation
700 mm / 27.5 in.
1000 mm / 39.4 in.
Figure 6-1 Space Requirements
Floor Levelling The ACS 1000 cabinet must be installed on an even surface and in upright
position.
Note: If the mounting surface is uneven, the doors of the cabinets become
misaligned and do not open or close properly.
The floor must be of non-flammable material, with smooth and non-abbra-
sive surface, protected against humidity diffusion, levelled and able to
support the weight of the converter (min. 1’000 kg/m2).
Floor Fixings Holes for fixing the drive cabinet to the floor are located in the base of the
cabinet as indicated in Figure 6-2. The holes are accessible through the
cabinet and are suitable for M12 floor fixings.
x x
ACS 1000
x x x
Figure 6-2 Position of Mounting Holes (Top View)
Cable Ducts Cable ducts must be of non-flammable material, with non abrasive surface
and protected against humidity, dust and animals.
ACS 1000 User’s Manual, Rev. E 3BHS102768 6-3 (of 26)
Chapter 6 - Installation
6.3.2 Raw Water Circuit
Industrial water of good quality must be used in the raw water circuit. Char-
acteristic limit values of the raw water are given in Table 6-2. If in doubt
about the water quality on your premises contact your local water utility.
Table 6-2 Raw Water Specification
Parameter Value
pH 6–9
Conductivity < 500 µS / cm
Hardness 3 – 15 dH
Chloride (Cl) < 300 mg/l
Above 300 mg/l titanium stabilized exchanger plates required
Total dissolved Recommended: < 300 mg/l
solids (TDS) Up to 1000 mg/l possible, provided limits for hardness and
chloride are not exceeded
Suspended solids < 10 mg/l
Raw Water Interface The raw water is connected to the cooling unit via two flexible hoses (part
of the supply). The hoses are either entered from the top, from the bottom
or from the side. Characteristic values of the raw water interface are given
in Table 6-3.
Table 6-3 Raw Water Interface Specification
ACS 1000-
ACS 1000-W1 Remarks
W2/-W3
Flow rate ≥ 80 l/min ≥ 150 l/min
Pressure drop across heat < 2 bar < 2 bar
exchanger and piping (at
nominal flow)
Inlet operating pressure range 2 – 10 bar 2 – 10 bar * ideal: 3 – 6 bar
Inlet temperature min. 4 °C min. 4 °C max. 38 °C with
max. 27 °C max. 27 °C derating
Outlet temperature max. 38 °C max. 38 °C
Max. heat transfer to main 1.8 % of rated 1.8 % of rated
cooling water circuit (all losses apparent drive apparent
included, except residual heat) power drive power
Length of hoses (part of supply) 2m 2m
Hose inner diameter 32 mm 32 mm
* Pressure difference between inlet and outlet ≥ 1 bar
6-4 (of 26) 3BHS102768 ACS 1000 User’s Manual, Rev. E
Chapter 6 - Installation
6.3.3 Preparing the Installation Site
1 Check the installation site conditions according to Installation Site Re-
quirements, page 6-2.
2 See drawing Dimensions and floor mounting in Appendix E - Layout
and Mechanical Drawings for exact dimensions, if holes and chan-
nels for the cables and the water hoses have to be cut into the floor
and mounting holes have to be drilled.
3 When preparing the piping for the raw water supply consider the
maximum length of the flexible hoses and the specifications of the
raw water interface. See Raw Water Interface, page 6-4 and Figure
6-3 to Figure 6-5.
Customer side piping
Hose length: 2 meters
Inlet
Outlet
Figure 6-3 Raw Water Inlet from Top
Customer side piping
Inlet
Hose length: 2 meters
Outlet
Figure 6-4 Raw Water Inlet from Side1
1. For raw water inlet from the side, an opening must be cut into the side wall
to mount the duct plate. An additional metall blanking plate with the same
dimensions as the original duct plate must be made.
Note: Make sure that no metall chips and dust remain in the cabinet.
ACS 1000 User’s Manual, Rev. E 3BHS102768 6-5 (of 26)
Chapter 6 - Installation
Inlet
Outlet
Hose length: 2 meters
Customer side piping
Figure 6-5 Raw Water Inlet from Bottom
6.3.4 Transportation to Installation Site
4 Proceed as described in Chapter 11 - Transportation, Storage,
Disposal and Recycling when moving and unpacking the ACS 1000
and checking for transportation damages.
Caution: Drive components can be damaged during transportation.
! The converter must be transported in upright position.
Use the lifting lugs on the top of the converter if moved by crane.
5 If parts are defective or missing, contact your local ABB representa-
tive or the ABB Logistic Center.
6.3.5 Mechanical Door Interlock
Note: The front doors of the power sections of the ACS 1000 are mechan-
ically interlocked with the grounding switch.
The ACS 1000 is shipped with the grounding switch in grounded position.
In this position all doors of the power sections can be opened.
Should the grounding switch be in open position (not grounded) and the
auxiliary supply is not switched on, the doors of the power sections cannot
be opened.
To open the doors proceed as follows:
6 Remove the metall plate in the control section (see Figure 6-6).
7 Pull the attached wire towards the control section. The grounding
switch lock will be released.
8 Close the grounding switch (grounded position).
6-6 (of 26) 3BHS102768 ACS 1000 User’s Manual, Rev. E
Chapter 6 - Installation
The doors can now be opened.
9 Refit the metall plate and secure it with the two screws.
a b
Figure 6-6 Mechanical Door Interlock
6.3.6 Mounting the Cabinet
10 Carefully move the cabinet to its final mounting position.
11 Check if the doors are misaligned. If they do not open and close prop-
erly re-adjust the floor levelling or place levelling plates under the
base as described in Re-aligning the Doors, page 6-8.
12 Fix the cabinet to the floor.
13 Remove the top and bottom angle brackets which secure the swing
frame, see Figure 6-7. Keep the angle brackets for later use.
Swing frame
with inverter
and rectifier
stacks
Figure 6-7 Angle Brackets
ACS 1000 User’s Manual, Rev. E 3BHS102768 6-7 (of 26)
Chapter 6 - Installation
6.3.7 Re-aligning the Doors
In case the cabinet doors are misaligned and do not open and/or close
propperly, levelling plates (80 x 300 x 0.5 mm) have to be placed under
the base.
Lift the cabinet by crane at the corresponding side (see Figure 6-8).
Place the levelling plates under the base. More than one plate may be
necessary to re-align the doors.
lift here and
place levelling
plates
lift here and
place levelling
plates
Figure 6-8 Doors Misaligned
6-8 (of 26) 3BHS102768 ACS 1000 User’s Manual, Rev. E
Chapter 6 - Installation
6.3.8 Connecting the Raw Cooling Water
14 Connect the hoses for the raw water circuit. See Figure 6-9 A ... F.
Figure 6-9 Connecting the Raw Water Circuit (Positions A to F)1
Exchange duct plate (top)
and blanking plate if hoses
are entered from below
Inlet
Outlet
B
Customer side piping
Enter flexible hoses
Inlet
Outlet
1. If side entry is made at the installation site, an opening for the duct plate
must be cut into the side wall. The openings on the top and on the bottom,
which are not used, must be closed by a metall blanking plate.
Note: Make sure that no metall chips and dust remain in the cabinet.
ACS 1000 User’s Manual, Rev. E 3BHS102768 6-9 (of 26)
Chapter 6 - Installation
C
Customer side piping
Connect hoses to raw water
supply, using appropriate flanges
Inlet (inner diameter of hoses 32 mm)
Outlet
D
Customer side piping
Cut hoses to length
Inlet
Outlet
6-10 (of 26) 3BHS102768 ACS 1000 User’s Manual, Rev. E
Chapter 6 - Installation
E
Customer side piping
Connect hoses to
Inlet inlet and outlet
Outlet
Fasten hoses with
supplied clamps
6.4 Electrical Installation
Note: All applicable manufacturer’s instructions and local regulations
must be followed when installing this equipment. If any instruction in this
manual appears to be in conflict with the local regulations, contact your
local ABB representative for further assistance.
6.4.1 Selecting the Cables
Transformer The cable from the circuit breaker to the transformer primary has no
Primary Cables special requirements. It should carry a voltage rating consistent with the
voltage present in the primary circuit. The ampacity rating should be
consistent with the size of the transformer in use and the protection
settings of the protection equipment. Derating of cable ampacity in accor-
dance with maximum expected ambient temperature, raceway fill factors,
and any other factors required by local electrical codes should be applied.
Installation should be in compliance with standard industry practice for
medium voltage equipment.
ACS 1000 User’s Manual, Rev. E 3BHS102768 6-11 (of 26)
Chapter 6 - Installation
If required by local electrical code an equipment safety ground wire should
be supplied either separately or by including it in the 3 conductor cable.
The ampacity of this conductor should be in accordance with the code.
Transformer The cables from the transformer secondary windings to the ACS 1000
Secondary Cables busbars, are exposed to common mode voltages, resulting from normal
inverter operation. For this reason, it is necessary to use cables rated for
insulation levels of 5 kV (phase to earth) or higher for all transformer
secondary connections, regardless of the transformer secondary voltage
level (1327 V, 1903 V, or 2305 V). Cables rated for 5 kV are typically used
in North America, in Europe, cables rated for 6kV/10 kV are common.
For information on maximum permitted length of the transformer
secondary cables see Appendix A - Technical Data.
A cable with 3 individually shielded conductors or a cable with one overall
shield is recommended to insure compliance with EMC requirements, and
to provide a low impedance high frequency path through which the
common mode currents can flow. Shields should be terminated and
grounded in as short a distance as possible at both ends. The ACS 1000
includes a vertical ground busbar within the cable termination compart-
ment for this purpose.
A non-shielded 3-conductor cable with a continuous corrugated aluminum
armor may be used alternatively to the shielded cables described above.
A non-shielded steel armored cable or a non-shielded cable with inter-
locked armor should not be used. Connectors with 360° electrical contact
to the armor should be used to terminate the cable ends to ground.
The ampacity rating of the cable should be consistent with 125% of the
rated current of the ACS 1000 being supplied (allows for harmonic
content) and the protection settings of the protection equipment. Derating
of cable ampacity in accordance with maximum expected ambient temper-
ature, raceway fill factors, and any other factors required by local electrical
codes should be applied.
Installation should be in compliance with standard industry practice for
medium voltage equipment. Cables must be terminated with connectors
according to the cable manufacturer’s requirements.
If required by local electrical code an equipment safety ground wire should
be supplied either separately or by including it in the 3-conductor cable.
The ampacity of this conductor should be in accordance with the code.
Motor Cables There are no special requirements to be considered for the cable from the
ACS 1000 to the motor. A voltage rating consistent with the voltage
present in the motor circuit must be selected. The ampacity rating should
be consistent with the size of the motor being supplied and the overload
settings of the motor protection software as input to the ACS 1000.
Derating of cable ampacity in accordance with maximum expected
ambient temperature, raceway fill factors, and any other factors required
by local electrical codes should be applied. Installation should be in
compliance with standard industry practice for medium voltage equip-
ment.
6-12 (of 26) 3BHS102768 ACS 1000 User’s Manual, Rev. E
Chapter 6 - Installation
Cable screening is not required for the motor cables since converter
output voltage and current are sinusoidal. Therefore no measures against
common mode currents are needed.
If required by local electrical code an equipment safety ground wire should
be supplied either separately or by including it in the 3 conductor cable.
The ampacity of this conductor should be in accordance with the code.
Motor cables are terminated within the ACS 1000 in the same way as
transformer secondary cables.
For information regarding the maximum recommended cable length for
motor cables see Appendix A - Technical Data.
Dimensioning When dimensioning the power cables, the actual situation (method of
Power Cables installation, voltage drop due to cable length etc.) and the local regulations
must be considered. To achieve best EMC it is recommended to use three
phase cables, individually shielded and with steel armouring.
Refer also to the specifications of the cable manufacturer.
Auxiliary Power Cable A 3-phase cable without neutral connector is required for the auxiliary
power supply. Select type and ratings according to the local regulations.
For ratings see also Appendix A - Technical Data.
Control Cables Control cables should be provided in accordance with Table 6-4. Cable
shields should be terminated on the ACS 1000 end only. Either single or
multiple twisted pair cables may be used.
Table 6-4 Recommended Control Cables
Cross-Section
Signal Type General Cable Type
(I/O Termination)
Analog Input Twisted pair(s) - Overall Shield 0.5 to 2.5 mm2 / AWG
20 to AWG 12
Analog Output Twisted pair(s) - Overall Shield 0.5 to 2.5 mm2 / AWG
20 to AWG 12
Digital Input Twisted pair(s) 0.5 to 2.5 mm2 / AWG
20 to AWG 12
Digital Output Twisted pair(s) 0.5 to 2.5 mm2 / AWG
20 to AWG 12
6.4.2 Equipment Grounding
It is recommended to connect the ACS 1000 ground busbar to the plant
ground busbar. The recommended cross-section of the ground connection
depends on the motor cable cross-section.
ACS 1000 User’s Manual, Rev. E 3BHS102768 6-13 (of 26)
Chapter 6 - Installation
6.4.3 Cable Routing
Power Cables Routing of mains and motor cables must be carried out in compliance with
the local regulations and according to the specifications and recommen-
dations of the cable manufacturer.
• If single phase cables are used, the cables with the three different
phases must be grouped close together to achieve EMC.
• If the cross section of the cable shielding is less than 50% of the cross
section of one phase, an additional grounding wire must be laid along
the power cables to avoid excessive heating losses in the cable
shieldings.
Cable Termination Cables must be terminated with connectors according to the cable manu-
facturer’s requirements.
Grounding Wire Routing of the grounding connection must comply with local regulations.
In some countries redundant cable routing is required.
Control Cables Control cables should not be laid in parallel to the power cables. If this
cannot be avoided, a minimum distance of 30 cm (12 in) must be main-
tained between control and power cables.
Control and power cables should be crossed at an angle of 90°.
6.4.4 Transformer and Motor Connection Diagrams
The following figures show typical connections for transformer and motor
cables. The actually applied connecting schemes must comply with local
regulations.
Factory PE Transformer
ground
a1 b1 c1 a2 b2 c2
Shielding Armouring
1U1 1V1 1W1 2U1 2V1 2W1
Factory
ground ACS 1000
PE
Figure 6-10 Transformer Connection 3-line Diagram
6-14 (of 26) 3BHS102768 ACS 1000 User’s Manual, Rev. E
Chapter 6 - Installation
Factory 7 8 9
ground ACS 1000
2-
7 8
2- 7 9
Motor
Figure 6-11 Motor Connection 3-line Diagram
6.4.5 Transformer and Motor Cable Entry
The transformer and motor cables are connected in the cable connection
section of the ACS 1000 cabinet as illustrated in Figure 6-12 and Appendix
E - Layout and Mechanical Drawings, 3BHS128178, sheet no. 20.
2U1
Front side 2V1
of cabinet
2W1
U2
V2
W2
1U1
1V1
1W1
Side view Front view
Figure 6-12 Power Cable Entries from the Top
ACS 1000 User’s Manual, Rev. E 3BHS102768 6-15 (of 26)
Chapter 6 - Installation
Transformer and motor cable entry is from the bottom or from the top. The
entry plates mounted on top of the cable connection section must be relo-
cated to the base of the cabinet. The removable spacers on the upper
terminals must be relocated to the lower terminals, if the cables are
entered from below (see Connecting Transformer and Motor Cables, page
6-17).
The entry plates are suitable for cables with a maximum diameter of
45 mm.
Caution: Voltages up to 4000 Volt can be present in the cable termination
! section.
High voltages can cause flashover between a phase and earth.
Cables must not touch terminals of any other phase. A minimum clearance
of 20 mm must be maintained between each cable and the terminals of
any other phase. Adequate distance is obtained with spacers as shown in
Figure 6-17.
Minimum Creepage When a cable is connected to a busbar and spacers are used, attention
Distance has to be paid to the minimum required creepage distance. Depending on
the Comparative Tracking Index (CTI) of the insulation material of the
cable the following Minimum Creepage Distances (MCD) apply:
Table 6-5 Creepage Distance
MCD in mm CTI
63 600
71 400....600
80 175....400
If the CTI value of the insulation material is unknown, the values in row
three of the table apply.
6-16 (of 26) 3BHS102768 ACS 1000 User’s Manual, Rev. E
Chapter 6 - Installation
Cable Entries
Power cable entries
(rear)
Aux. power
and control
cable entries
(front)
Figure 6-13 Cable Entries from Top
The entry plates with 20 and 32 power leads as well as a table for the entry
plate selection are illustrated in Appendix E - Layout and Mechanical
Drawings, 3BHS128178 and 3BHS128179.
6.4.6 Connecting Transformer and Motor Cables
For connecting the transformer and motor cables to the ACS 1000
proceed as described below.
Danger: Make sure that the ACS 1000 is disconnected from the mains
and auxiliary supply.
• The main circuit breaker (MCB) must be open and in service position
(i.e. disconnected from mains and grounded).
• Auxiliary power supply must be disconnected.
• Any control equipment to be connected with the ACS 1000 is discon-
nected.
1 Open the cabinet door of the control section.
2 Open the control swing frame and the door of the power cable
section. All power terminals are now accessible.
3 If the cable entry is from below, the entry plates mounted on top of the
control section must be relocated to the base of the cabinet. The entry
plates have not to be turned up side down.
4 To measure conductor length, strip the mains and motor cables and
enter the conductors through the entry plate according to the scheme
in Figure 6-14.
5 Mark the required conductor length and withdraw the cables. Cut
them to length, strip conductor ends and mount connectors (diameter
of cable lug max. M12).
ACS 1000 User’s Manual, Rev. E 3BHS102768 6-17 (of 26)
Chapter 6 - Installation
Caution: Electrically conducting dust may cause damage to the converter
! or lead to malfunction.
Do not cut cables inside the cabinet. Make sure that dust and chips from
cable cutting and stripping cannot enter the cabinet.
6 Enter the conductors through the EMC sleeves of the entry plate as
shown in Figure 6-14 and Figure 6-15:
1 Strip cable insulation in the entry plate area. Tighten
the EMC sleeve on the stripped part of the cable with
cable ties.
2 Remove the entry plate if cable entry is not possible
otherwise and slide it onto the cable. After the
grounding connections are made, fasten the entry
plate.
3 IP 54: Remove the rubber grommets from the entry
plates and cut them to adequate diameter for the
transformer and the motor cable (Figure 6-15). To
ensure proper sealing, cut along the diameter
marking that corresponds to the cable diameter. Slide
the grommet onto the cable (Figure 6-14). The
grommet must fit tight to prevent water from entering
the cabinet. If necessary, seal the junctions with sili-
cone rubber.
6-18 (of 26) 3BHS102768 ACS 1000 User’s Manual, Rev. E
Chapter 6 - Installation
Outer sheath
1st. insulated conductor
2nd. insulated conductor
3rd. insulated conductor
End of cable shield
Rubber grommet
Entry plate
Cabinet roof
EMC sleeve
Strip conductor
insulation to
expose the shield Mounting
bracket
Strip conductor
insulation to
expose the shield EMC sleeve
Cabinet floor
Entry plate
End of cable shield
3rd. insulated conductor
Stress cone 2nd. insulated conductor
1st. insulated conductor
Cable terminal fittings and sealing ends
according to the specification of the
cable manufacturer Outer sheath
Cable entry from top Cable entry from below
Figure 6-14 Cable Entry for Power Cables (IP 20 and IP 22).
Note: Tighten the EMC sleeve on the stripped part of the cable with cable
ties. For IP 54 units, add a rubber grommet on the cable.
ACS 1000 User’s Manual, Rev. E 3BHS102768 6-19 (of 26)
Chapter 6 - Installation
A B
Figure 6-15 Cutting Rubber Grommets to Size
Grounding 7 Enter the grounding wire through an EMC sleeve of the entry plate
Connections and fasten it to the grounding bar. If there is no free entry available,
enter the grounding wire together with a phase conductor through the
EMC sleeve.
Figure 6-16 Grounding Wire and Phase Conductor Combined in One
EMC-Sleeve.
Insulation Checks 8 Check the insulation of each cable before it is connected.
9 Check that the results are within the specifications of the cable manu-
facturer.
6-20 (of 26) 3BHS102768 ACS 1000 User’s Manual, Rev. E
Chapter 6 - Installation
Connecting 10 If the cables are entered from below, relocate the 5 removable
Transformer and Motor spacers mounted on the top terminal bars, symmetrically to the lower
Cables terminals of the cabinet (Figure 6-17).
Busbar
Removable spacer
Figure 6-17 Power Terminals with Removable Spacers
Caution: Electrically conducting dust may cause damage to the converter
! or lead to malfunction.
Do not drill inside the cabinet. Make sure that dust and chips from drilling
cannot enter the cabinet.
11 If holes have to be drilled into the busbar terminations, remove them
and drill the holes outside of the cabinet.
12 Connect the phase conductors of the transformer cables to the U1,
V1 and W1 busbars and the phase conductors of the motor cable to
the U2, V2 and W2 terminals. See Figure 6-12 for illustration. Refer
to connector specifications for tightening torques.
ACS 1000 User’s Manual, Rev. E 3BHS102768 6-21 (of 26)
Chapter 6 - Installation
Caution: Voltages up to 4000 Volt can be present in the cable termination
! section.
High voltages can cause flashover between the potential of a phase and
earth.
Therefore cables must not touch terminals of any other phase. A minimum
clearance of 20 mm must be maintained between each cable and the
terminals of any other phase.
13 Connect all ends of the cable shields to the grounding busbar.
14 Close the door of the power cable section and fasten it with the
supplied screws (M6).
15 Fasten entry and blanking plates with the supplied screws (M6).
Note: When the door of the power cable section has been closed and the
plates have been rearranged, all provided screws must be mounted and
tightened to achieve best EMC.
6.4.7 Connecting Auxiliary Power Cable
Auxiliary power cable entry is from below or from the roof of the control
section.
16 Enter the auxiliary power cables through the EMC slot of the entry
plate that leads to the front area of the control section.
1 If shielded cables are used strip the cable insulation
in the entry area. The conductive cushions of the
EMC slot should contact the stripped part of the cable
(see Figure 6-18).
Side view Bottom view
Entry plate
EMC conductive cushions
Holes for
Base plate position screws
Entry plate
Figure 6-18 Auxiliary Power Cable and Control Cable Entry
2 IP 54 and cable entry from above: Remove the rubber
grommets from the entry plate and cut them to
adequate diameter for the auxiliary power cable (see
6-22 (of 26) 3BHS102768 ACS 1000 User’s Manual, Rev. E
Chapter 6 - Installation
Figure 6-15). To ensure proper sealing, cut along the
diameter marking that corresponds to the cable diam-
eter. Slide the grommet onto the cable. The grommet
must sit tight in order to prevent water from entering
the cabinet. If necessary, seal the junctions with sili-
cone rubber.
3 Loosen the position screws of the entry plate and
enter the cables.
4 Push the two halves of the entry plate together and
tighten the screws. The EMC conductive cushions
should press tightly around the bare screens.
17 Connect the cable to terminals X10 (U, V, W, PE). To locate the termi-
nals see Appendix F - Wiring Diagrams.
18 If shielded cables are used, connect cable shields to PE (see Figure
6-19).
PE W V U
Figure 6-19 Connecting Auxiliary Power Supply
6.4.8 Connecting Control Cables
19 Enter the control cables through the EMC slot of the entry plate at the
front of the control section.
1 Strip cable insulation in the entry area. The conduc-
tive cushions of the EMC slot should contact the
stripped part of the cable. See Figure 6-18. If the sur-
face of the screen is covered with nonconducting ma-
terial, cut the screen carefully and pull it back over the
insulation (see Figure 6-20).
ACS 1000 User’s Manual, Rev. E 3BHS102768 6-23 (of 26)
Chapter 6 - Installation
Stripped cable Conductive surface of the Stripped part covered with
screen made visible copper foil
Copper foil
Cable Screened twisted pair
Grounding wire
Figure 6-20 EMC Cable Preparation
2 IP 54 and cable entry from above: Remove the rubber
grommets from the entry plate and cut them to
adequate diameter for the auxiliary power cable (see
Figure 6-15). To ensure proper sealing, cut along the
diameter marking that corresponds to the cable diam-
eter. Slide the grommet onto the cable. The grommet
must fit tight to prevent water from entering the
cabinet. If necessary, seal the junctions with silicone
rubber.
3 Loosen position screws of the entry plate and enter
the cables.
4 Push the two halves of the entry plate together and
tighten the screws. The EMC conductive cushions
should press tightly around the bare screens.
20 Mark each conductor appropriately for easy identification.
21 Lead and connect the cables to terminals X300, X301 and to the
IOEC boards (see Figure 6-21) using the cable duct. The terminals
and the boards are located at the right hand side of the swing frame
(see Figure 6-21). For details refer also to Appendix F - Wiring
Diagrams.
Note: Control cable shields must be terminated on the ACS 1000 end
only.
Figure 6-21 shows the control section with the swing frame removed. The
I/O boards, signal terminals and auxiliary terminals can also be seen. The
door of the power terminal section is closed.
6-24 (of 26) 3BHS102768 ACS 1000 User’s Manual, Rev. E
Chapter 6 - Installation
Customer I/O board
IOEC 2
Aux. power terminals
X10
Signal terminals
X300, X301
Access door to
power terminal section
I/O board
IOEC 3
I/O board
IOEC 4 (optional)
Figure 6-21 Control Section View
22 Connect the cables to the external control terminals.
23 Check that the door of the power cable section and the entry and
blanking plates are fastened with the supplied screws (M6).
Caution: EMC must be achieved at all time.
! All fastening screws must be mounted and tightened, and the control
section door must be closed.
ACS 1000 User’s Manual, Rev. E 3BHS102768 6-25 (of 26)
Chapter 6 - Installation
24 Check the wiring.
A functional test of the control circuits will be made during commis-
sioning.
25 Close all doors, including the door of the power cable section and the
control section.
The installation procedure is now finished. Proceed with Chapter 7 - Prep-
aration for Commissioning.
6-26 (of 26) 3BHS102768 ACS 1000 User’s Manual, Rev. E
Chapter 7 - Preparation for Commissioning
7.1 Overview
The ACS 1000 may only be commissioned by ABB staff or by their autho-
rized representative.
Performance tests are carried out by ABB staff in the presence of the
customer.
7.2 Check Items
Check that the following preconditions are fulfilled before commissioning
is started:
Note: The ACS 1000 has batteries installed in the control section. If the
drive has been stored for up to one year before commissioning, the
batteries must be replaced.
1 Installation of the ACS 1000 must be completed according to Chapter
6 - Installation.
2 High voltage (HV) switchgear is connected and ready for operation.
3 Converter transformer is ready for operation.
4 The motor is ready for operation.
5 Grounding cables of transformers, converter and motor are
connected.
6 All cable screens are connected.
7 Insulation of cables, transformers and motor has been tested and
complies to the specification (insulation test of the converter will be
performed by the commissioning engineer). An official test report is
available.
8 Mains voltage supply is available.
9 The driven load (pump, fan, compressor etc.) is ready for operation.
10 Auxiliary voltage supply is available.
11 All control cables to the ACS 1000 are connected:
• Main Circuit Breaker (for more information see Appli-
cation Note ACS 1000 Main Circuit Breaker)
• Tripping loop (for more information see Application
Note ACS 1000 Tripping Loop)
• Remote control stations, PLC
ACS 1000 User’s Manual, Rev. E 3BHS102768 7-1 (of 4)
Chapter 7 - Preparation for Commissioning
• Optional equipment (for more information see
Appendix B - Customer Specific Options).
12 Raw water circuit is connected to the converter and ready for opera-
tion.
For further information see Chapter 6 - Installation, Raw Water
Circuit, page 6-4.
13 All spare parts are available.
14 Sufficient deionized water for filling the cooling system of the
ACS 1000 is available.
7.3 Instrumentation and Protection Equipment
Adequate current transformers and protection relaying must provide
protection for the transformer and the transformer primary cables. The
intended approach for protection is shown in Figure 7-3. As shown in the
figure the protection can be considered to consist of three areas.
The first area identified as transformer primary fault protection is an instan-
taneous trip area that protects against short circuits in the transformer
primary windings or in the cables supplying the transformer primary. The
lower level of the trip threshold should be adjusted high enough to insure
that nuisance tripping does not occur due to transformer inrush currents.
The second area identified as transformer secondary fault protection is a
short delay trip area that protects against short circuits in the transformer
secondary windings, the cables from the transformer secondaries to the
ACS 1000, or in the input rectifier stages of the ACS 1000. The short time
delay provided should be adjustable and should be set long enough to
insure that the protection does not trip due to transformer inrush current.
The trip level should be adjusted low enough to insure that tripping will
occur within 250 ms (including MCB delay time) even when transformers
with high input impedance are applied.
The final area identified as overload protection should provide long term
overload protection with an inverse time characteristic. It is intended to
protect the transformer and cables from long term overload conditions.
The protection described can be provided with individual protection relays
or with a single microprocessor based unit. Required current transformers
should be sized in accordance with the rated current levels of the trans-
former. Basic protection configuration and connection should be as shown
in Figure 7-1 and Figure 7-2.
7-2 (of 4) 3BHS102768 ACS 1000 User’s Manual, Rev. E
Chapter 7 - Preparation for Commissioning
7.3.1 Mains Connection Scheme
Vacuum Circuit Breaker
Trip signals
52
50
51N
51
AC time residual
overcurrent relay
Instantaneous/AC time
overcurrent relay
MCB open ACS 1000
DO 2.5 Tripping loop
MCB close X300
DO 2.6
MCB is closed
DI 2.10
MCB is open
DI 2.9
MCB is available
DI 2.11
Figure 7-1 Mains Connection Scheme with Vacuum Circuit Breaker
Fast acting current limiting fuse
Vacuum Contactor
Trip signals
50
51N
51
AC time residual
overcurrent relay
Instantaneous/AC time
overcurrent relay
ACS 1000
MCB open Tripping loop
DO 2.5
X300
MCB close
DO 2.6
MCB is closed
DI 2.10
MCB is open
DI 2.9
MCB is available
DI 2.11
Figure 7-2 Mains Connection Scheme with Vacuum Controller
ACS 1000 User’s Manual, Rev. E 3BHS102768 7-3 (of 4)
Chapter 7 - Preparation for Commissioning
Current
x 20 Transformer primary fault protection
Transformer secondary fault protection
x 10
Overload protection
Adjustable time delay
x1
Time
10 ms 250 ms 1s 10 s 100 s
Figure 7-3 Sample Protection Scheme
7.4 Commissioning Procedure
The commissioning procedure will last 1 to 2 days excluding waiting time.
7.4.1 Required Customer Manpower
At least 1 qualified technician should be available throughout the whole
commissioning period, who is:
• familiar with medium and low voltage equipment and with the local
safety regulations
• familiar with the driven process
• authorized to operate the associated medium and low voltage equip-
ment (MCB, other MV and LV switchgear etc.)
• authorized to operate the driven process for testing purposes.
7.4.2 Acceptance
When commissioning is completed, the commissioning report will be
signed by the customer as a sign of acceptance and by the ABB commis-
sioning engineer. One copy will be retained by the customer, a second
copy by ABB. The customer will then receive confirmation from ABB,
including a record of all actual parameter settings.
7.4.3 Warranty
Warranty will start on the date of acceptance, i. e. upon the signing of the
commissioning report by both parties, and will last 1 year.
7-4 (of 4) 3BHS102768 ACS 1000 User’s Manual, Rev. E
Chapter 8 - Operation
8.1 Introduction
This chapter outlines the regular operation using the CDP312 control
panel and the pushbuttons on the control section after the ACS 1000 has
been properly installed according to Chapter 6 - Installation and commis-
sioned.
Note: The operating instructions in this chapter are based on the detailed
descriptions in Chapter 5 - Parameter Viewing and Editing and Control
Panel Functions.
Therefore, it is recommended to read Chapter 5 - Parameter Viewing and
Editing and Control Panel Functions before starting to operate the
ACS 1000.
Remote Control When the ACS 1000 is controlled by a PLC or operated from external
stations, the reference value, the open and close commands of the MCB
and the start and stop commands are received via digital inputs or a
fieldbus adapter module. In these cases the control interface is adapted to
the specific configuration and therefore remote control operation is not
described in this chapter.
8.2 Safety Instructions
Note: Before starting to operate the ACS 1000 the general safety instruc-
tions in Chapter 1 - Safety Instructions must be read and understood.
Caution: Parameters and application macros are set during commis-
! sioning of the drive system and must not be changed afterwards.
Running the ACS 1000, the motor and the equipment being driven with
incorrect data can result in improper operation, reduction in control accu-
racy and damage to equipment.
Only qualified and certified personnel shall operate the drive system, i.e.
personnel who are familiar with the machine and the operation of the drive
system and the hazards involved and who have aquired the certificate
after having attended the ABB service training.
ACS 1000 User’s Manual, Rev. E 3BHS102768 8-1 (of 10)
Chapter 8 - Operation
Danger: High Voltage!
All doors, including the door of the power cable section must be closed
before energizing the ACS 1000.
Caution: EMC performance must be maintained at all time.
! All fastening screws must be mounted and tightened, and the control
section door must be closed.
Caution: The cooling water system may start automatically as soon as the
! auxiliary voltage is switched on, even if the converter is de-energized. The
pump is switched on as soon as the cooling water temperature drops
below 5 °C (for W1 type) or 15 °C (for W2/W3 types) or if the conductivity
level rises above alarm level (0.5 µS/cm).
Switch off the auxiliary voltage to shut down the cooling system.
8.3 Starting the ACS 1000
8.3.1 Checks before Start-up
Before starting the ACS 1000 check that:
• Installation and commissioning is completed
• No tools and foreign objects are left in the cabinet
• Auxiliary voltage is switched on
• All drive-specific start-up parameters have been set and checked
(see Chapter 5 - Parameter Viewing and Editing and Control Panel
Functions for information on checking and changing parameters)
• The cooling water system is ready for operation
• All valves of the cooling circuit are set to correct
position (see Appendix E - Layout and Mechanical
Drawings, Water Cooling Flow Diagram):
- V12, V13, V14, V80, (V81), V82 are shut;
- V1, (V2), V5, V11, V 15 are open
• The water level in the expansion vessel is approx.
80% (pressure in the cooling system is maintained
with the water level in the expansion vessel)
8-2 (of 10) 3BHS102768 ACS 1000 User’s Manual, Rev. E
Chapter 8 - Operation
• All cabinet doors, including the protective separation door and the
control section door are closed
• The grounding isolator is in open position.
Grounding isolator
CDP 312 control panel
Main circuit breaker
close/open buttons
Gnd.- switch unlocked
indicator
EMERGENCY OFF
button
CLOSED
OPEN
Figure 8-1 Operating Elements on the Front Door
1 Check that input isolator is closed (if applicable).
2 Check that output isolator is closed (if applicable).
3 Select local mode by pressing the LOC REM key on the CDP 312
control panel. A capital “L” indicates that local mode is selected.
1 L -> 0.0 rpm 0
LOC
Status Rdy MCB on
REM MotSpeed 0.00 rpm
MotCurr 0.0 A
See Chapter 5 - Parameter Viewing and Editing and
Control Panel Functions for a detailed description on
selecting local and remote.
ACS 1000 User’s Manual, Rev. E 3BHS102768 8-3 (of 10)
Chapter 8 - Operation
8.3.2 Closing the Main Circuit Breaker
4 Check that the MCB is in operating position (not racked out or in test
position).
5 Check that the ACS 1000 is ready:
• No alarm or error message on CDP 312 control panel
display
• No emergency off is active.
If an alarm is still pending, proceed as described in
Chapter 10 - Trouble Shooting and Repair to eliminate
the fault.
If the drive system is OK, the CDP 312 control panel
displays READY MCB ON.
1 L -> 0.0 rpm 0
Status Rdy MCB on
MotSpeed 0.00 rpm
MotCurr 0.0 A
6 Clear the fault buffer on the CDP 312 control panel (see Chapter 5 -
Parameter Viewing and Editing and Control Panel Functions, Table 5-
3). No error message must be displayed.
1 L -> 0.0 rpm 0
ACT Status Rdy MCB on
MotSpeed 0.00 rpm
MotCurr 0.0 A
1 L -> 0.0 rpm 0
1 LAST FAULT
Overspeed
980226 12:30:02.3256
1 L -> 0.0 rpm 0
RESET 1 LAST FAULT
H Min S
1 L -> 0.0 rpm 0
Status Rdy MCB on
MotSpeed 0.00 rpm
MotCurr 0.0 A
8-4 (of 10) 3BHS102768 ACS 1000 User’s Manual, Rev. E
Chapter 8 - Operation
8.3.3 Charging the DC Link
7 To charge the DC link of the ACS 1000:
• Press the MAIN CIRCUIT ONLlNE button on the con-
trol section door of the ACS 1000.
The CDP 312 control panel displays CHARGING.
Charging of the DC link lasts a few seconds.
1 L -> 0.0 rpm 0
Status Charging
MotSpeed 0.00 rpm
MotCurr 0.0 A
8 The ACS 1000 is now READY TO START as shown on the display.
1 L -> 0.0 rpm 0
Status Rdy to Strt
MotSpeed 0.00 rpm
MotCurr 0.0 A
8.4 Entering Setpoint and Starting Up the ACS 1000
9 To change the setpoint press REF on the CDP 312 control panel.
1 L ->[ 0.0 rpm]
REF
Status Rdy to Strt
MotSpeed 0.00 rpm
MotCurr 0.0 A
10 Change the setpoint (speed, torque, according to the selected appli-
cation macro; see Chapter 4 - I/O Interfaces and Application Macros)
by using the UP/DOWN keys.
1 L ->[ 600.0 rpm]
Status Rdy to Strt
MotSpeed 0.00 rpm
MotCurr 0.0 A
The new setpoint becomes active immediately.
ACS 1000 User’s Manual, Rev. E 3BHS102768 8-5 (of 10)
Chapter 8 - Operation
11 Press a MODE key to exit the setpoint mode.
ACT PAR 1 L -> 600.0 rpm 0
Status Rdy to Strt
MotSpeed 0.00 rpm
FUNC DRIVE MotCurr 0.0 A
12 Select the sense of rotation using the or key.
Caution: Many processes do not permit to reverse the sense of rotation.
! The sense of rotation can only be changed using the control panel keys, if
parameter 11.3 DIRECTION is set to REQUEST.
1 L <- 600.0 rpm 0
Status Rdy to Strt
MotSpeed 0.00 rpm
MotCurr 0.0 A
On the display, the selected sense of rotation is indi-
cated with an arrow.
13 Start the ACS 1000 by pressing the key.
Magnetization of the motor takes place.
1 L -> 600.0 rpm 0
Status Magnetizing
MotSpeed 0.00 rpm
MotCurr 0.0 A
After a few seconds the motor speed is ramped up to the
reference speed.
The display now indicates that the motor is running.
1 L -> 600.0 rpm 1
Status Running
MotSpeed 600.00 rpm
MorCurr 75.0 A
8-6 (of 10) 3BHS102768 ACS 1000 User’s Manual, Rev. E
Chapter 8 - Operation
8.5 Stopping the ACS 1000
The ACS 1000 can be stopped using one of the stop modes selected in
parameter group 21 (see Appendix H - Signal and Parameter Table).
1 Press the STOP key on the CDP 312 control panel.
1 L -> 550.0 rpm 1
Status Stopping
MotSpeed 300.00 rpm
MotCurr 0.0 A
The ACS 1000 stops following the preset stop function.
The main circuit breaker remains closed.
When zero speed is reached the display shows:
1 L -> 550.0 rpm 0
Status Rdy to Strt
MotSpeed 0.00 rpm
MotCurr 0.0 A
Note: As long as the ACS 1000 is stopping it can always be restarted
when the START key is pressed.
Danger: High voltage! The capacitors of the intermediate DC link are still
charged.
Do not access the power circuit or the motor after an operational stop!
Before accessing the power circuit, disconnect the ASC 1000 from the
mains power supply and ground the drive system as described in section
De-energizing the ACS 1000, page 8-8.
ACS 1000 User’s Manual, Rev. E 3BHS102768 8-7 (of 10)
Chapter 8 - Operation
8.6 De-energizing the ACS 1000
To disconnect the drive from the main power supply, proceed as follows:
1 Stop the ACS 1000 (see previous section).
2 Press the main circuit OFFLINE button on the control section door of
the ACS 1000 (see Figure 8-1). The MCB opens.
Danger: High voltage!
Do not access the ACS 1000, the motor or the power cables as long as
the drive system is not properly grounded.
After switching off the mains and after the motor has come to a stop, wait
approximately 5 minutes for the DC link capacitors to discharge. The light
GND.- ISOLATOR UNLOCKED must be on, before grounding the
ACS 1000.
The display shows:.
1 L -> 550.0 rpm 0
Status Rdy MCB On
MotSpeed 0.00 rpm
MotCurr 0.0 A
3 Wait approx. 5 minutes until the DC link capacitors are discharged to
a safe level and the light GND.- ISOLATOR UNLOCKED on the
control section door is on.
ON !
tor
I s olaed
nd.- lock
G un
Figure 8-2 Grounding Isolator Unlocked
8-8 (of 10) 3BHS102768 ACS 1000 User’s Manual, Rev. E
Chapter 8 - Operation
4 Close the grounding isolator located on the right side of the control
section.
CLOSED
OPEN
Figure 8-3 Grounding Isolator Closed
The display shows:
1 L -> 550.0 rpm 0
Status ErthIsoClos
MotSpeed 0.00 rpm
MotCurr 0.0 A
5 Open input and output isolators (if present) and secure the MCB
(rack-out, lock-out, tag-out).
6 Switch off the auxiliary voltage.
7 The drive system is now dead, and safe access is possible.
Caution: The cooling system may start automatically as soon as the auxil-
! iary voltage is switched on, even if the converter is de-energized. The
pump is switched on as soon as the cooling water temperature drops
below 5 °C (for W1 type) or 15 °C (for W2/W3 types) or if the conductivity
level rises above alarm level (0.5 µS/cm).
Switch off the auxiliary voltage to shut down the cooling system.
8.7 Emergency Stop
An emergency stop is initiated if the tripping loop opens. The tripping loop
is a hardwired, fail-safe protective circuit, provided to trip the main circuit
breaker directly. Contacts from EMERGENCY OFF buttons and other
external protection devices are series connected to the tripping loop. If
ACS 1000 User’s Manual, Rev. E 3BHS102768 8-9 (of 10)
Chapter 8 - Operation
one of the contacts opens the drive shuts down (see Appendix F - Wiring
Diagrams).
8.7.1 Local Emergency Stop
The EMERGENCY-OFF pushbutton on the control door of the ACS 1000
(see Figure 8-1) is equipped with two sealable, transparent cylindrical
covers. They slide into each other when the emergency-off is pressed.
When sealed, the emergency-off cannot be retracted to its initial position
before the seal wire has been removed.
If the emergency-off is pressed during operation, the MCB opens and the
ACS 1000 coasts down.
The display shows:
1 L -> 550.0 rpm 0
ACS 1000 9133WR
*** Fault ***
MCB Disturb
Danger: High voltage!
Do not access the ACS 1000, the motor and the power cables as long as
the drive system is not properly grounded.
After switching off the mains and after the motor has come to a stop, wait
approximately 5 minutes for the DC link capacitors to discharge. The light
GND.- ISOLATOR UNLOCKED must be on, before grounding the
ACS 1000.
8.8 Other Functions
For other functions of the CDP 312 control panel, i.e.:
• Actual and fault history display for process monitoring
• Setting the contrast of the display
see Chapter 5 - Parameter Viewing and Editing and Control Panel Func-
tions.
8-10 (of 10) 3BHS102768 ACS 1000 User’s Manual, Rev. E
Chapter 9 - Preventive Maintenance
9.1 Introduction
This chapter contains the maintenance schedule and step by step instruc-
tions of specific maintenance tasks.
Danger: The ACS 1000 is a high voltage device.
High voltage can cause physical injury and death.
Maintenance, parts replacement and other work on the ACS 1000 must
only be carried out by qualified personnel in compliance with local regula-
tions.
It is strongly recommended to carry out all maintenance work according to
the maintenance schedule and the service instructions, on time and at the
stated intervals.
Note: To maintain safe and reliable operation of the ACS 1000, ABB
recommends taking out a service contract with the local ABB service
organization. For more information contact your local service represen-
tative.
Service Training Maintenance and service training courses are offered by ABB. Customer
staff having successfully attended such courses, will be certified to do
maintenance and repair work on the ACS 1000 after the warranty period.
For further information contact your local ABB service representative.
Log Book All maintenance activity should be recorded in the maintenance log book
including:
• Date and time
• Any maintenance work
• Cooling water data (conductivity, temperature, pres-
sure and water level in expansion tank) before and
after the maintenance routine.
ABB Service Address For further assistance, contact your ABB sales representative for the
address of the local ABB service organization.
ACS 1000 User’s Manual, Rev. E 3BHS102768 9-1 (of 24)
Chapter 9 - Preventive Maintenance
9.2 Safety Instructions
Note: Before starting the ACS 1000, the general safety instructions in
Chapter 1 - Safety Instructions must be read and understood.
Danger: The ACS 1000 is a high voltage device.
High voltage can cause physical injury and death.
When installed and serviced in accordance with the instructions in this
manual by qualified personnel, the device is safe.
Danger: Do not access the ACS 1000 or work on the motor or the power
cables, if the drive system is energized and not properly grounded!
After switching off the mains and after the motor has come to a stop, wait
approximately 5 minutes for the DC link capacitors to discharge. The light
GND.- ISOLATOR UNLOCKED must be on, before grounding the
ACS 1000.
Danger: Dangerous voltages from external control circuits may be present
inside the ACS 1000, even if mains and auxiliary power are shut off.
Take appropriate measures when working on the ACS 1000, i.e
deenergize and disconnect all external devices before work is started.
Danger: Some loads can cause the motor to rotate!
Always disconnect, short-circuit or block the motor before work is started.
Danger: Before power is applied to the drive, check that:
• mains and motor connections are ok
• auxiliary power and control connections are ok
• no tools or other foreign objects are left in the cabinet
• all doors including the door of the power cable section are closed.
9-2 (of 24) 3BHS102768 ACS 1000 User’s Manual, Rev. E
Chapter 9 - Preventive Maintenance
9.3 Maintenance Schedule
Table 9-1 Maintenance Schedule
Check items Carried out by Frequency Comments
Cleaning Qualified If necessary See Cleaning Inside, page 9-4
personnel (at least yearly)
Cleaning (printed ABB If necessary See service documentation
circuit boards) service* (at least yearly)
Cable connections Qualified ABB After 1 year, then See Checking Wire and Cable Connections,
personnel service* every 4 years page 9-4
Replacing batteries Qualified (ABB Every 2 years See Replacing Batteries, page 9-5
personnel service)*
Replacing de-ionizer Qualified If necessary (at See Changing the Ion Exchange Vessel, page
resin personnel least every 2 9-13
years)
Cooling pump(s) Qualified Weekly Check for smooth operation without excessive
personnel noise and vibration
See Removing and Installing a Cooling Pump,
page 9-17
Replacing micro-filter Qualified When replacing See Replacing the Micro-Filter, page 9-15
personnel de-ionizer resin
(at least every 2
years)
Cleaning strainer Qualified If necessary See Cleaning Strainer, page 9-16
personnel
Water leakage Qualified Weekly
personnel
Water conductivity Qualified Weekly See Checking Water Conductivity, page 9-23
(main cooling circuit) personnel
Water pressure Qualified Weekly Pressure drop > 2 bar
(main cooling circuit) personnel See to Checking Water Pressure, page 9-24
Water level in Qualified Weekly See Checking Water Level, page 9-24
expansion tank personnel
Parameter backup, Qualified ABB After parameter DriveWindow software required
Software version personnel service* modification (at
least every 5
years)
Functional test ABB Yearly See service documentation
Visual inspection service*
Capacitors ABB After 3 years, Check capacitance
service* then every 2 See service documentation
years
ACS 1000 User’s Manual, Rev. E 3BHS102768 9-3 (of 24)
Chapter 9 - Preventive Maintenance
Table 9-1 Maintenance Schedule (Continued)
Check items Carried out by Frequency Comments
Insulation test ABB Every 2 years See service documentation
service*
MCB Qualified ABB According to
Transformer personnel service* applicable
Motor maintenance
instructions
Spare parts ABB Yearly
service*
Optional equipment ABB See service documentation
service*
*ABB service or authorized service personnel, usually defined in a service
contract
9.4 Specific Maintenance Tasks
9.4.1 Cleaning Inside
Note: Dust on electrical components and wiring can cause malfunction
and damage the components.
1 De-energize the drive system according to Chapter 8 - Operation, De-
energizing the ACS 1000, page 8-8.
2 Carefully clean compartment floors with the vacuum cleaner with a
soft nozzle to prevent component damage.
3 Restart the drive system as described in Chapter 8 - Operation,
Starting the ACS 1000, page 8-2.
9.4.2 Checking Wire and Cable Connections
Note: Vibration can loosen electrical connections and cause occasional
malfunction or equipment failure. Dust and moisture can built up in loose
connections and cause loss of low-level signals.
1 De-energize the drive system according to Chapter 8 - Operation, De-
energizing the ACS 1000, page 8-8.
2 Check all power and control cable connections and tighten them if
necessary. Check that all plugs and connectors are tight.
9-4 (of 24) 3BHS102768 ACS 1000 User’s Manual, Rev. E
Chapter 9 - Preventive Maintenance
Caution: The capacitor bushings will be damaged when excessive force
! is applied.
Do not exceed the maximum tightening torque when tightening the
capacitor terminals.
Depending on the type of capacitor, the maximum tightening torque is as
follows: 20 Nm (177 in-lbs)
25 Nm (221 in-lbs)
The tightening torque values are printed on a label on the capacitor.
3 When finished restart the drive system as described Chapter 8 -
Operation, Starting the ACS 1000, page 8-2.
9.4.3 Replacing Batteries
The batteries (marked G3, G4, G5 and G6) are located on the bottom of
the swing frame in the control section.
The batteries can be changed while the ACS 1000 is in operation.
Warning: When the drive is in operation, voltages are present in the
control section.
Do not touch any live circuitry!
1 When changing the batteries during operation, disable the battery
monitoring function. Set parameter 31.05 DISABLE BATTERY TEST
to ON.
Note: Parameter 31.05 will automatically be set to OFF after 1 hour.
2 Unhook the rubber belts (see 1, Figure 9-1).
3 Pull the batteries out approx. 5 cm (2 in) and disconnect the wires
(see Figure 9-1).
Note: Even if the battery has been disconnected, the LED Battery
Connected on the EPS board stays on, until the next test cycle of the
battery is started again.
ACS 1000 User’s Manual, Rev. E 3BHS102768 9-5 (of 24)
Chapter 9 - Preventive Maintenance
- + -
+
- + -
+
Figure 9-1 Replacing Batteries
4 Place the new batteries and reconnect the cables. The label on each
cable must match the label on the battery (see Figure 9-1).
5 Fasten the rubber belts
6 Check the polarity (see Figure 9-2):
• On the EPS board, unplug the (+)-cable (1,2)
• Connect the terminal of the unplugged cable to test
pin (3). The LED (4) lights up if the polarity is correct
• Plug the (+)-cable (2) back to the (+)-pin.
4 1
3
2
Figure 9-2 Polarity Check
7 Lock the door and record the date of replacement in the logbook.
9-6 (of 24) 3BHS102768 ACS 1000 User’s Manual, Rev. E
Chapter 9 - Preventive Maintenance
9.5 Maintaining the Water Cooling System
Caution: The cooling system may start automatically as soon as the
! auxiliary voltage is switched on, even if the converter is de-energized. The
pump is switched on as soon as the cooling water temperature drops
below 5 °C (for W1 type) or 15 °C (for W2/W3 types) or if the conductivity
level rises above alarm level (0.5 µS/cm).
Switch off the auxiliary voltage to shut down the cooling system.
Note: Valves, tubes and hoses are delicate parts.
Do not bend or put any pressure on the valves, plastic tubes and hoses.
Note: Refer to the flow diagram and layout drawings in Appendix L -
Subsupplier Data for details on the cooling circuit and location of the
valves.
9.5.1 Draining the Cooling System
Warning: In case of glycol in the cooling water refer to Cooling Water with
Anit-Freeze, page 9-9 for safety information.
1 De-energize the ACS 1000 according to Chapter 8 - Operation, De-
energizing the ACS 1000, page 8-8.
2 Switch off the motor protection switche(s) -Q11/( -Q12) of the
pump(s).
3 Swing out the converter swing frame (by removing the screws) and
pull strongly.
4 Connect a hose (long enough to reach out of the drive) to the drain
valve located inside the inverter section at the bottom (ISO G ½).
5 Open valve V12.
6 Open the drain valve and drain the inverter. (A pump can be used to
speed up the procedure.)
7 Open V80 / (V81) to drain the water cooling unit. (You can lead the
water (7-8 liter) out of the converter by means of a hose).
8 Close the valves and take the hoses out of the converter.
ACS 1000 User’s Manual, Rev. E 3BHS102768 9-7 (of 24)
Chapter 9 - Preventive Maintenance
9 Fix the converter swing frame appropriately.
Note: The converter has been drained for repair purposes only. To drain
the converter completely (for storage purposes) contact your ABB repre-
sentative.
9.5.2 Filling the Cooling Circuit
Caution: Do not switch on a cooling pump if the cooling circuit is empty.
! If a cooling pump runs dry, the pump seals will be damaged immediately.
Cooling Water Drinking water of good quality must be used in the main cooling circuit.
However, it is recommended to fill the circuit with deionized water to
extend the lifetime of the ion exchange resin. For change intervalls see
Maintenance Schedule, page 9-3.
The cooling water should conform to the values in Table 9-2.
If in doubt about the quality of the drinking water on your premises contact
your local water utility.
Table 9-2 Cooling Water (Drinking Water) Specification
Parameter Value
pH 6 – 8.5
Conductivity < 300 µS / cm
Hardness 3 – 10 dH
Chloride (Cl) < 100 mg/l
Copper (Cu) < 0.1 mg/l
Total dissolved solids (TDS) < 300 mg/l
Note: Inhibitors and other chemicals must not be added to the water.
9-8 (of 24) 3BHS102768 ACS 1000 User’s Manual, Rev. E
Chapter 9 - Preventive Maintenance
Cooling Water with When the ACS 1000 has been ordered with an anti-freeze, a container
Anit-Freeze with the appropriate type and amount of glycol is delivered with the drive.
Warning: Ethylene glycol is a hazard for humans and animals when
swallowed.
Avoid skin and eye contact and wear protective clothing including rubber
gloves and goggles when handling ethylene glycol.
Food stuffs and beverages must be kept separate from the place of work.
The safety data sheet supplied by the supplier of ethylen glycol (e.g.
SwedeWater) must be followed.
Caution: The conductivity of glycol as it is used in cars is too high.
! The converter cannot be started since the conductivity level remains too
high.
Only pure ethylene glycol which acts only as an anti-freeze and has no
inhibitors for corrosion protection is permitted for the ACS 1000.
In the following table the characteristic values of the anti-freeze are listed:
Table 9-3 Characteristic Values of the Anti-freeze
Content >99.8 %
Density at 20 °C (68 °F) 1.1133 - 1.1140 g/cm3
Viscosity at 20 °C (68 °F) 19 mm2/s
Specific heat capacity at 20 °C (68 °F) 2.3 kJ/kgK
Thermal conductivity 0.29 W/mK
pH-Value neutral
When transferring, mixing and filling the anti-freeze it must be guaranteed,
that no chips, grease, remnants or any other impurities infiltrate the
coolant.
For storing and mixing only clean containers specifically designated and
appropriately labelled must be used.
ACS 1000 User’s Manual, Rev. E 3BHS102768 9-9 (of 24)
Chapter 9 - Preventive Maintenance
In the following table the values for the desired frostproofing are listed:
Table 9-4 Water Ethylene Glycol Concentration for the Desired Frost-
proofing
Frostproofing Pure Ethylene Glycol Distilled Water
- 10 °C (14 °F) 20 % 80 %
- 20 °C (-4 °F) 34 % 66 %
- 30 °C (-22 °F) 44 % 56 %
- 40 °C (-40 °F) 52 % 48 %
Ideally the mixing procedure should take place at ambient temperature
(+ 5 °C to + 30 °C).
When mixing the follwing procedure must be observed:
1 Check that the type of ethylene glycol is appropriate. See Table 9-3.
2 Check that the blue 60 liter plastic container which is part of the
delivery contains approximately the same amount of glycol as
declared on the label (last two digits of the item number correspond
to the amount of glycol in liter; e.g. 3BHL001483P0021 corresponds
to 21 liter).
3 Fill in distilled water until the level in the container is at approx. 3/4.
4 Thoroughly mix the ethylene glycol mixture.
Note: There will be negative effects on the thermal and hydraulic
behaviour of the coolant if the water-glycol mixture is not mixed
thoroughly.
5 Fill the container completely. Afterwards thoroughly mix the liquid
again!
The required frostproofing has been reached now.
After filling the system (see Filling the System, page 9-10) the remaining
liquid can be used for refills after maintenance or repairs if stored in a
closed container.
Filling the System 1 Switch off the motor protection switch(es) -Q11/( -Q12) of the
pump(s).
2 Switch on the auxiliary voltage with switch -Q1.
3 Close valves V1, V11, V15, V80, V81*.
4 Open valves V2*, V5, V12, V17*.
(*depending on version of cooling unit and application)
9-10 (of 24) 3BHS102768 ACS 1000 User’s Manual, Rev. E
Chapter 9 - Preventive Maintenance
5 Connect the filling hose to the ISO-R1/2” connector of valve V14.
A pressure of approx. 1 to 2 bar is required for filling water into the
circuit. Using a small pump might be necessary.
6 Open valve V14 and start the filling.
In case the water does not start to flow through the filter Z2, valve V15
has to be opened additionally.
Note: Filling rate <= 15 l/min
7 Stop the filling when the water level in the expansion vessel is approx.
80 %.
8 Close valve V14 and open valve V1, V11 and V15 (in case it has not
been opened yet).
9 Open the priming plug on the pump house(s) (see Figure 9-3) and
deaerate the pump(s). Close the plug again.
Priming plug
Figure 9-3 Pump with Priming Plug
10 Install a temporary jumper.
• Disconnect the connector X21 from IOEC board 1.
• Connect a jumper (cross-section 1 mm2) between
X21-1 and X21-3 of connector X21.
• Plug the connector X21 back into IOEC board 1.
Note: The temporary jumper must be removed before the drive goes into
operation.
11 Close the motor protection switch -Q11.
ACS 1000 User’s Manual, Rev. E 3BHS102768 9-11 (of 24)
Chapter 9 - Preventive Maintenance
Danger: High voltage!
High voltage can cause physical injury and death.
The auxiliary supply has to be turned off befor starting work at terminal
X10.
12 Check the system pressure. If the pressure remains below trip level
(2 bar) the rotation of the pump is not correct. In this case the rotation
of the pump must be reversed by changing two phases on the
terminal X10.
13 In case of a single pump drive run the pump for 30 minutes to
deaerate the drive and proceed with step 18.
14 In case of a redundant system install a temporary jumper.
• Disconnect the connector X22 from IOEC board 1.
• Connect a jumper (cross-section 1 mm2) between
X22-1 and X22-3 of connector X22.
• Plug the connector X22 back into IOEC board 1.
Note: The temporary jumper must be removed before the drive goes into
operation.
15 Let the first pump run for 10 minutes and then turn off Q11.
16 Switch on Q12.
17 Run the second pump for 30 minutes to deaerate the drive.
18 Close valve V17* while the pump is running.
19 Close valve V11 and fill up the expansion vessel according to step 6
to step 8.
20 Close valve V12.
21 Disconnect the hose.
22 In case a temporary jumper (step 10 and step 14) has been used, it
must be removed.
23 In case of a redundant pump close Q11.
24 Reset the alarm. Refer to Appendix H - Signal and Parameter Table.
After filling the cooling circuit the conductivity value might not be in the
permitted range (conductivity alarm level: 0.5 µS/cm, conductivity trip
level: 0.7 µS/cm).
The auto-cooling sequence starts automatically. For more information
refer to Appendix H - Signal and Parameter Table.
9-12 (of 24) 3BHS102768 ACS 1000 User’s Manual, Rev. E
Chapter 9 - Preventive Maintenance
9.5.3 Adding Water to the Cooling System
If the level in the expansion tank is below 80 %, the cooling circuit needs
to be topped up with additional water via valve V14. Use cooling water as
specified in Filling the Cooling Circuit, page 9-8.
Cooling water can be refilled while the ACS 1000 is in operation.
Warning: When the drive is in operation, voltages are present in the
control section.
Do not touch any live circuitry!
1 Connect the filling hose to the ISO-R1/2” connector of valve V14.
A pressure of approx. 1 to 2 bar is required for filling water into the
circuit. Using a small pump might be necessary.
2 Close valve V11.
3 Open valve V14 and start the filling.
Note: When filling cooling water while the ACS 1000 is in operation, the
drive may trip on a conductivity fault.
Fill the water in slowly to avoid a trip.
4 Stop the filling when the water level in the expansion vessel is approx-
imately 80%.
5 Close valve V14.
6 Open valve V11.
7 Remove the hose.
9.5.4 Changing the Ion Exchange Vessel
The ion exchange vessel (marked C1) is the cylindrical container at the
front on the right hand side of the cooling cabinet.
The ion exchange vessel can be replaced while the ACS 1000 is in oper-
ation.
Warning: When the drive is in operation, voltages are present in the con-
trol section.
Do not touch any live circuitry!
ACS 1000 User’s Manual, Rev. E 3BHS102768 9-13 (of 24)
Chapter 9 - Preventive Maintenance
Caution: Avoid skin and eye contact with the deionizer resin.
! Contact may result in minor irritation.
Wear protective clothing including rubber gloves and goggles when
handling the resin. Refer to the Safety Data Sheet 8-1000-193 in
Appendix L - Subsupplier Data.
Note: The changing procedure must not last longer than 30 minutes.
The conductivity level could rise above trip level.
Removing the Ion 1 Close valve V11 and V15.
Exchange Vessel
2 Disconnect the 3 hoses on top of the vessel (1 in Figure 9-4), by
pressing the outer ring in the coupling with two fingers towards the
vessel and pulling the hose away from the vessel. Mark the hoses for
easy identification when refitting.
Note: Do not use force.
If the hose gets stuck, push it first towards the coupling and then out.
Note: Some residual water may spill out of the tubes.
3 Unhook the 2 rubber belts (2 in Figure 9-4) and carefully move the
vessel out of the cabinet.
4 Cover the openings of the hose couplings appropriately to prevent dirt
from entering.
3
OUT IN
4
3
1
Resin
4
2
Figure 9-4 Removing Tubes from Ion Exchange Vessel
9-14 (of 24) 3BHS102768 ACS 1000 User’s Manual, Rev. E
Chapter 9 - Preventive Maintenance
5 Dismount the distributor head (3 in Figure 9-4) by unscrewing it from
the vessel. The head is sealed with an O-ring. Hand force should be
sufficient to remove the head.
6 Slowly pull the distributor head and tube (3 and 4 in Figure 9-4) out of
the vessel.
7 Clean the tube by rinsing it with water.
Mounting a new 8 Dismount the distributor head of the spare vessel according to step 5
Exchange Vessel and step 6.
9 Slowly push the distributor head and tube with the hose couplings into
the spare vessel.
Note: Hand force should be sufficient to thighten the head.
10 Lift the ion exchange vessel back to the cabinet and fix it with the two
rubber belts.
11 Reconnect the 3 hoses to the vessel in the correct order (push in
approx. 10 mm).
Note: IN and OUT is marked on the distributor head. The hose from the
distributor head to the filter Z2 must be connected to OUT.
12 Carefully open valve V11.
13 Check for leaks.
14 Open valve V15.
15 Refill cooling liquid if needed according to Adding Water to the
Cooling System, page 9-13.
Disposal of Ion Dispose of the vessel and the exhausted resin according to local regula-
Exchange Vessel tions. Refer to the Safety Data Sheet 8-1000-193 in Appendix L - Subsup-
plier Data or consult your local ABB service organization.
9.5.5 Replacing the Micro-Filter
The micro-filter (marked Z2) is located on the left hand side of the cooling
cabinet above the air-to-water heat exchanger. It can be changed while
the ACS 1000 is in operation.
Note: The changing procedure must not last longer than 30 minutes.
The conductivity level could rise above trip level.
1 Close valve V11 and V15.
ACS 1000 User’s Manual, Rev. E 3BHS102768 9-15 (of 24)
Chapter 9 - Preventive Maintenance
2 Unscrew and remove micro-filter. Hand force should be sufficient to
remove the filter. Some residual water may spill out (see Figure 9-5).
Locate and remove large O-ring or gasket, wipe lubricant of.
Figure 9-5 Removing Micro-filter
3 Discard used cartridge. Rinse bottom of housing and scrub cap and
bottom of housing with nonabrasive sponge or cloth.
4 Lubricate O-ring or gasket with clean petroleum jelly (vaseline). Place
O-ring back into groove and put it smoothly into place using a finger
(or place gasket on the rim of the bottom of the housing).
5 Slide new filter cartridge over standpipe in bottom of housing.
Cartridges with tapered ends need to be installed with the tapered
end toward the threads of the housing.
6 Screw bottom of housing onto cap and hand tighten. Do not over-
tighten. Make sure that the cap standpipe slips into the cartridge.
7 Open valve V11.
8 Check for leaks and then open valve V15.
9 Open valve V12.
10 Close V12 after 30 minutes.
9.5.6 Cleaning Strainer
The raw water strainer (marked Z1) is located in the center area of the
cooling cabinet next to the raw water inlet.
1 De-energize the system according to Chapter 8 - Operation, De-en-
ergizing the ACS 1000, page 8-8.
2 Turn off the raw water supply.
3 Unscrew and remove the strainer (see Figure 9-6).
9-16 (of 24) 3BHS102768 ACS 1000 User’s Manual, Rev. E
Chapter 9 - Preventive Maintenance
Figure 9-6 Removing Strainer
4 Clean and re-mount the strainer.
5 Turn on the raw water supply.
6 Restart the ACS 1000 as described in Chapter 8 - Operation, Starting
the ACS 1000, page 8-2.
9.5.7 Removing and Installing a Cooling Pump
It is recommended to leave the pump house connected in the piping, and
remove only the motor part. The impeller and the mechanical seal are
mounted on the motor shaft.
Note: Refer also to the pump information in Appendix L - Subsupplier
Data, Document No. 8-1000-198/E.
Removing the Pump in 1 De-energize the ACS 1000 according to Chapter 8 - Operation, De-
a Single Pump Drive energizing the ACS 1000, page 8-8.
2 Unhook the 2 rubber mounting belts (see Figure 9-7) and carefully lift
the ion exchange vessel out of the cabinet. The connecting tubes are
long enough, so that the ion exchange vessel has not to be discon-
nected.
Figure 9-7 Removing Ion Exchange Vessel
ACS 1000 User’s Manual, Rev. E 3BHS102768 9-17 (of 24)
Chapter 9 - Preventive Maintenance
3 Switch off the motor protection switch -Q11 of the pump. The motor
protection switch is located in the control section. Make sure that it
cannot be switched on by accident.
Pump 1
Motor protection switch
(-Q11, -Q12)
any of the 4 positions
Pump 2
(optional)
K11/K12
Figure 9-8 Location of the Motor Protection Switches and Pumps
4 Close valve V1, V5 and V15. Secure the valves in order not to be
opened by accident.
5 Drain the pump P1 through the drain plug on the lower side of the
pump house (not visible in Figure 9-9). (About 4 liters of water will run
out.) Open V14 to let air into the system. Remount the drain plug and
close V14.
Priming plug
(drain plug is situated
below)
Motor fixing bolts
Figure 9-9 Pump with Priming Plug and Fixing Bolts
9-18 (of 24) 3BHS102768 ACS 1000 User’s Manual, Rev. E
Chapter 9 - Preventive Maintenance
6 Open the motor terminal box and check the pump terminals for
voltage.
7 Disconnect the power supply cable in the motor terminal box (see
Figure 9-10).
Note: Mark the cables for later identification.
8 Loosen the metal clamp around the pump house (see Figure 9-10).
Metal Clamp
Motor Terminal Box
Power Supply
Figure 9-10Motor Terminal Box and Power Supply
9 Fasten the pump motor in a suitable way in order to prevent it from
falling down (depending on the pump fixing, this is not always neces-
sary).
10 Loosen the four bolts on the pump stand (see Figure 9-9).
11 The motor, including impeller and the mechanical seal can now be
pulled from the pump house out of the converter cabinet.
Note: Be careful not to damage the O-ring between the pump house and
the motor.
Do not use sharp-edged tools. Use a suitable lifting device.
Note: The pump motor might be stuck and is therefore hard to remove.
Remounting the Pump 1 Move the pump back into the water cooling cabinet.
in a Single Pump Drive
2 Slide the impeller into the pump house (moisten the O-ring with
water). Be careful not to damage the O-ring between the pump house
and the motor.
ACS 1000 User’s Manual, Rev. E 3BHS102768 9-19 (of 24)
Chapter 9 - Preventive Maintenance
3 Remount the four bolts on the pump stand. Tighten the four bolts on
the pump stand by hand lightly.
4 Remount the clamp to the pump house (5...6 Nm).
5 Tighten the four bolts on the pump stand (21...26 Nm).
6 Connect the power supply cable to the motor terminal box.
7 Open valve V1.
8 Open the priming plug on the pump house (see Figure 9-9) and
deaerate the pump. Close the plug again.
9 Open valve V14 to relief air. Close the valve again.
10 Open valve V5 and V15.
11 Open valve V12.
12 Install a temporary jumper.
• Disconnect the connector X21 from IOEC board 1.
• Connect a the jumper (cross-section 1 mm2) between
X21-1 and X21-3 of connector X21.
• Plug the connector X21 back into IOEC board 1.
Note: The temporary jumper must be removed before the drive goes into
operation.
13 Switch on the motor protection switch -Q11 (see Figure 9-8) and the
auxiliary power supply (-Q1).
14 Check the system pressure. If the pressure remains below trip level
(2 bar) the rotation of the pump is not correct. In this case the rotation
of the pump must be reversed by changing two phases in the motor
terminal box. (Refer to Changing Rotation of Pump, page 9-23.)
15 Reset the alarm. Refer to Appendix H - Signal and Parameter Table.
16 As soon as the conductivity is below alarm level (0.5 µS) the drive can
be started again.
17 After running the pump for 30 min. close valve V12.
18 Check for leaks.
19 Carefully lift the ion exchange vessel back to the cabinet and remount
the two rubber belts.
20 Refill cooling liquid if needed according to Adding Water to the
Cooling System, page 9-13.
Removing the Pump in 1 Switch off the motor protection switch of the pump to be removed:
a Redundant Pump
• -Q11 for pump 1 (upper pump)
Drive
• -Q12 for pump 2 (lower pump).
9-20 (of 24) 3BHS102768 ACS 1000 User’s Manual, Rev. E
Chapter 9 - Preventive Maintenance
The motor protection switches are located in the control section.
Make sure that they cannot be switched on by accident. See also
Figure 9-8.
Warning: When the drive is in operation, voltages are present in the con-
trol section.
Do not touch any live circuitry!
2 Unhook the 2 rubber mounting belts (see Figure 9-7) and carefully lift
the ion exchange vessel out of the cabinet. The connecting tubes are
long enough, so that the ion exchange vessel has not to be discon-
nected.
3 Close valve V1/(V2). Secure the valves in order not to be opened by
accident (e.g. by using tape). The pump is now isolated between
valve V1/(V2) and check valve V3/(V4).
4 Drain the pump P1/(P2) through the drain plug on the lower side of
the pump house (not visible in Figure 9-9). (About 3 liters of water will
run out.) Remount the drain plug.
5 Open the motor terminal box and check the pump terminals for
voltage.
6 Disconnect the power supply cable in the motor terminal box (see
Figure 9-10).
Note: Mark the cables for later identification.
7 Loosen the metal clamp around the pump house (see Figure 9-10).
8 Fasten the pump motor in a suitable way in order to prevent it from
falling down (depending on the pump fixing, this is not always neces-
sary).
9 Loosen the four bolts on the pump stand (see Figure 9-9).
10 The motor, including impeller and the mechanical seal can now be
pulled from the pump house out of the converter cabinet.
Note: Be careful not to damage the O-ring between the pump house and
the motor.
Do not use sharp-edged tools. Use a suitable lifting device.
Note: The pump motor might be stuck and is therefore hard to remove.
ACS 1000 User’s Manual, Rev. E 3BHS102768 9-21 (of 24)
Chapter 9 - Preventive Maintenance
Remounting the Pump 1 Move the pump back into the water cooling cabinet.
in a Redundant Pump
2 Slide the impeller into the pump house. Be careful not to damage the
Drive
O-ring between the pump house and the motor.
3 Remount the four bolts on the pump stand. Tighten the four bolts on
the pump stand by hand lightly.
4 Remount the clamp at the pump house (5-6 Nm).
5 Tighten the four bolts on the pump stand (21...26 Nm).
6 Connect the power supply cable to the motor terminal box.
7 Open valve V1/(V2).
8 Open the priming plug on the pump house (see Figure 9-9) and
deaerate the pump. Close the plug again.
The pump that has been exchanged has to be deaerated and must there-
fore run for a short time in parallel with the other pump. For this reason the
pump must be started manually according to the following procedure:
9 Depending on which pump has been exchanged one of the following
two procedures has to be followed:
Manual start of pump 1 (closing K11 (see Figure 9-8)):
• Go to the IOEC board 1, digital output DO 1.1.
• Disconnect the connector X21 from IOEC board 1.
• Connect a temporary jumper (cross-section 1 mm2)
between X21-1 and X21-3, but do not loosen X21-2.
• Plug the connector X21 back into IOEC board 1.
Manual start of pump 2 (closing K12 (see Figure 9-8)):
• Go to the IOEC board 1, digital output DO 1.2.
• Disconnect the connector X22 from IOEC board 1.
• Install a temporary jumper (cross-section 1 mm2)
between X22-1 and X22-3, but do not loosen X22-2.
• Plug the connector X22 back into IOEC board 1.
10 Monitor the system pressure and remember the value. Refer to
Checking Water Pressure, page 9-24.
11 Switch on -Q11/(-Q12) to start the pump.
12 Run the pump for 10 seconds and monitor the system pressure. If the
system pressure rises by 0,3 bar or more the pump is working
correctly. If the system pressure does not rise, the rotation of the
pump must be reversed, by changing two phases in the motor
terminal box. (Refer to Changing Rotation of Pump, page 9-23.)
13 Stop the pump by switching off -Q11/(-Q12).
14 Wait for 1 minute (in order not to overload the fuses) and then start
the pump again and run it for 10 seconds.
9-22 (of 24) 3BHS102768 ACS 1000 User’s Manual, Rev. E
Chapter 9 - Preventive Maintenance
15 Remove the temporary jumper at -X21/(-X22).
16 Close -Q11/(-Q12) and reset the alarm. Refer to Appendix H - Signal
and Parameter Table.
17 Open valve V12.
18 Close V12 after 30 minutes.
19 Check for leaks.
20 Carefully lift the ion exchange vessel back to the cabinet and remount
the two rubber belts.
21 Refill cooling liquid if needed according to Adding Water to the
Cooling System, page 9-13.
Changing Rotation of 1 Switch off the motor protection switch of the pump:
Pump
• -Q11 for pump 1 (upper pump)
• -Q12 for pump 2 (lower pump).
The motor protection switches are located in the control section.
Make sure that they cannot be switched on by accident. See also
Figure 9-8.
Danger: High voltage!
High voltage can cause physical injury and death.
2 Open the connection box in the water-cooling section and check the
pump terminals 22, 23, 24 (upper pump) or 25, 26, 27 (lower pump)
for voltage.
3 Change two phases of the power supply cables of the corresponding
pump.
4 In case of a single pump drive proceed with Remounting the Pump in
a Single Pump Drive, page 9-19, step 13.
In case of a redundant pump drive proceed with Remounting the
Pump in a Redundant Pump Drive, page 9-22, step 10.
9.5.8 Checking Water Conductivity
The conductivity can be checked while the ACS 1000 is in operation.
1 Select the Actual Display mode on the control panel (refer to Chapter
5 - Parameter Viewing and Editing and Control Panel Functions, Ac-
tual Signal Display Mode, page 5-4).
2 Select parameter group 4 ACTUAL SIGNALS. In group 4, select
actual signal 04 InvWtrConductivity. The conductivity is displayed in
µS.
The conductivity should be below 0.5 µS.
ACS 1000 User’s Manual, Rev. E 3BHS102768 9-23 (of 24)
Chapter 9 - Preventive Maintenance
If the conductivity exceeds the alarm threshold of 0.5 µS, the control
panel displays the alarm message WtrConduct.
If the conductivity exceeds the trip threshold of 0.7 µS, the drive shuts
down and the panel displays the message WtrConduct.
9.5.9 Checking Water Pressure
The water pressure can be checked while the ACS 1000 is in operation.
1 Select the Actual Display mode on the control panel (refer to Chapter
5 - Parameter Viewing and Editing and Control Panel Functions, Ac-
tual Signal Display Mode, page 5-4).
2 Select parameter group 4 ACTUAL SIGNALS. In group 4, select
actual signal 03 InvWtrCoolPressure. The pressure is displayed in
bar. For further information refer to Appendix H - Signal and Param-
eter Table.
3 The reaction of the ACS 1000, if the water pressure decreases below
the trip threshold of 1.5 bar, depends on the number of pumps:
• If the ACS 1000 is equipped with two pumps, the
control panel displays the alarm WtrPressure and the
second pump is switched on. If the water pressure
does not encrease above the trip threshold after a
programmable time, the drive will trip.
• If the ACS 1000 has only one pump, the control panel
displays the alarm WtrPressure. If the water pressure
does not encrease above the trip threshold after a
programmable time, the drive shuts down.
9.5.10 Checking Water Level
The water level can be checked while the ACS 1000 is in operation.
• Check the water level at the level sight-glass located at the front of the
expansion tank.
The water level should be approximately 80%.
If the water level is below 80 % the cooling circuit needs to be topped
up. Refer to section Adding Water to the Cooling System, page 9-13.
The minimum water level is monitored by level switch B10. If the switch is
activated, the drive shuts down.
9-24 (of 24) 3BHS102768 ACS 1000 User’s Manual, Rev. E
Chapter 10 - Trouble Shooting and Repair
10.1 Overview
This chapter provides instructions on how to proceed when encountering
a problem with the ACS 1000 and related equipment. It is addressed to
qualified personnel responsible for servicing the ACS 1000.
Note: To maintain safe and reliable operation of the ACS 1000, ABB re-
commends taking out a service contract with the local ABB service orga-
nization. For more information contact your local service representative.
During the warranty period, any repair work must be carried out exclu-
sively by ABB service personnel. After the warranty period repair work can
be carried out by ABB service personnel or by qualified personnel who
have attended a service training on the ACS 1000.
For further information on the service training, contact your local ABB
service representative.
10.2 Safety Instructions
Note: Before starting work on the ACS 1000 the general safety regula-
tions in Chapter 1 - Safety Instructions must be read and understood.
Danger: The ACS 1000 is a high voltage device.
High voltage can cause physical injury and death.
When serviced according to the instructions in this manual, the device is
safe.
Do not attempt any work on the ACS 1000 which is not described in this
chapter.
All electrical, installation or repair work must only be carried out by quali-
fied personnel in compliance with local regulations.
ACS 1000 User’s Manual, Rev. E 3BHS102768 10-1 (of 40)
Chapter 10 - Trouble Shooting and Repair
Danger: High voltage can cause physical injury and death.
Do not work on the ACS 1000, the motor or the power cables, if the drive
system is not properly grounded!
After switching off the mains and after the motor has come to a stop, wait
approximately 5 minutes for the DC link capacitors to discharge. The light
GND.-ISOLATOR UNLOCKED must be on, before grounding the
ACS 1000.
Danger: Dangerous voltages from external control circuits may be present
inside the ACS 1000, even if mains and auxiliary power are shut off.
Take appropriate measures when working on the ACS 1000, i.e deener-
gize and disconnect all external devices before work is started.
Danger: Some loads can cause the motor to rotate! Therefore, always
disconnect, short or block the motor before work is started.
Danger: Before power is applied to the drive, check that:
• mains and motor connections are ok
• auxiliary power and control connections are ok
• no tools or other foreign objects are left in the cabinet
• all doors including the door of the power cable section are closed.
Warning: Ethylene glycol is a hazard for humans and animals when
swallowed.
Avoid skin and eye contact and wear protective clothing including rubber
gloves and goggles when handling the ethylene glycol.
Food stuffs and beverages must be kept separate from the place of work.
The safety data sheet for ethylen glycol (see Appendix L - Subsupplier
Data) must be followed.
10-2 (of 40) 3BHS102768 ACS 1000 User’s Manual, Rev. E
Chapter 10 - Trouble Shooting and Repair
Caution: The cooling system may start automatically as soon as the auxil-
! iary voltage is switched on, even if the ACS 1000 is de-energized. The
pump is switched on if the temperature decreases below 5 °C (for W1
type) or 15 °C (for W2/W3 types).
Switch off the auxiliary voltage to shut down the cooling system.
10.3 Standard Procedure for Trouble-Shooting
1 Call up the Fault History Display. Refer to Chapter 5 - Parameter
Viewing and Editing and Control Panel Functions, Actual Signal Dis-
play Mode, page 5-4.
Do not clear the fault buffer now!
2 Identify the fault and make a logbook entry:
Refer to Table 10-1 for explanation of the fault messages and for
instructions on fault finding and troubleshooting.
For efficient troubleshooting it is recommended to have the following
data available when calling your ABB service representative:
• Date and time of occurrence
• Load conditions (normal, overload or minimum load,
continuous or intermittent load etc.)
• Cooling water data (conductivity, temperature, pres-
sure and water level in expansion tank)
• Any other irregular situation or operating condition
(ambient temperature etc.).
3 Try to rectify the fault.
Note: When printed circuit boards or other components have to be
checked or replaced, always refer to the appropriate ABB service docu-
mentation.
Note: For your own safety, follow exactly the instructions in Table 10-1 for
fault finding and troubleshooting. Do not attempt any repair work on the
ACS 1000 beyond these instructions. Before starting to troubleshoot,
carefully read the warnings at the beginning of this chapter.
Note: If a problem cannot be solved, contact your ABB service represen-
tative.
ACS 1000 User’s Manual, Rev. E 3BHS102768 10-3 (of 40)
Chapter 10 - Trouble Shooting and Repair
4 If the fault is rectified start the ACS 1000 according to Chapter 8 - Op-
eration.
10.4 Alarms and Faults
If a malfunction occurs in the ACS 1000 or in the equipment monitored by
the ACS 1000, the CDP 312 control panel displays a corresponding alarm
or fault message. If a PC with the DriveWindow tool is available, the
message can also be viewed in the fault logger.
Two protection levels are used in the ACS 1000:
• Alarm (warning): an alarm does not shut down the drive. However,
a persisting alarm condition can often lead to a fault, if the condition
causing the alarm is not corrected.
• Fault: a fault always shuts down the drive. The type of shut-down de-
pends on the type of fault. See Table 10-1 and Appendix H - Signal
and Parameter Table.
In general, a fault condition must be corrected and the fault be man-
ually reset before the drive can be started again. In some cases, the
ACS 1000 resumes operation automatically after the fault condition is
cleared. Refer to Appendix H - Signal and Parameter Table.
Note: Depending on the type of fault, the main circuit breaker (MCB) is
opened by the ACS 1000 or stays closed.
The MCB is controlled and monitored entirely by the ACS 1000. There-
fore, no external opening command must be given to the MCB, if a fault
condition occurs.
Table 10-1 provides a list of all alarm and fault messages and information
on possible causes and suggestions on rectifying these.
The table does not give information or instructions on how to proceed
when printed circuit boards or other components have to be replaced or
checked or measurements have to be carried out. For information on
these refer to the software based ABB Service Tool and to appropriate
ABB service documentation. Also, when motor parameters or filter param-
eters have to be changed or an ID run has to be carried out, refer to the
appropriate ABB documentation.
Some of the alarm and fault messages relate to the specific equipment in
use (MCB, transformer, cooling system, synchronized bypass equipment,
braking chopper, etc.) and the configuration of the drive system. If the
equipment is not configured in the corresponding parameter or the alarm
or fault is not enabled, the related alarm and fault messages will not
appear on the display.
10-4 (of 40) 3BHS102768 ACS 1000 User’s Manual, Rev. E
Chapter 10 - Trouble Shooting and Repair
10.4.1 CDP 312 Control Panel
For a detailed description on
• displaying an active fault
• displaying a fault history
• checking parameters
see Chapter 5 - Parameter Viewing and Editing and Control Panel Func-
tions.
10.4.2 Types of Shut-down
In Table 10-1, the different types of shut down are represented by a
number or the letter S (softstop). A description of the meaning can be
found in Appendix H - Signal and Parameter Table, Chapter 4 Fault
Tracing.
10.5 Alarm and Fault Messages
Table 10-1 Alarm and Fault Messages and Fault Rectification
of Shut down
Alarm
Meaning of the Message
Type
Message Test and Rectification
- Possible Causes
AI3 IO4 Slos Analog Input 3 on IOEC 4 Signal Loss - Check wire connections x S
- Check analog signal with a multimeter
- Loose or disconnected wire(s)
- Signal below pre-set minimum level
AI4 IO4 Slos Analog Input 4 on IOEC 4 Signal Loss - Check wire connections x S
- Check analog signal with multimeter
- Loose or disconnected wire(s)
- Signal below pre-set minimum level
AnInpCalib Analog Input Calibration - In case of a fault: disconnect all ana- x 1b
An alarm comes if the analog inputs on the log inputs and repeat calibration
IOEC boards are calibrated
The drive shuts down if the analog input
calibration is not sucessful
- Analog signal connected during calibration
ACS 1000 User’s Manual, Rev. E 3BHS102768 10-5 (of 40)
Chapter 10 - Trouble Shooting and Repair
Table 10-1 Alarm and Fault Messages and Fault Rectification (Continued)
of Shut down
Alarm
Meaning of the Message
Type
Message Test and Rectification
- Possible Causes
AutoRestart Automatic Restart is activated after an x 2b
undervoltage trip
If activated, the display shows the alarm
AutoRestart.. If the voltage comes back within
a programmable time the ACS 1000 resumes
operation
If the time has elapsed and the voltage has not
come back, the ACS 1000 is shut down
Related parameters:
P 31.01 UNDERVOLT RESTART ENABLE
activates the restart function
P 31.02 UNDERVOLT WAIT TIME sets the
time
Aux Pow Fail Auxiliary Power Failure - Check 32 V AC for EPS board 2b
Auxiliary power supply of EPS board - Check LED on EPS board
If EPS board is working:
- No auxiliary voltage - Check ribbon cable between EPS
- Defective INT board and INT board for proper connection
AuxFan 1/2 Auxiliary Fan 1 or 2 ACS 1000 with one fan: x 1b
ACS 1000 with one fan: - Check motor protecting switch Q13
If motor protecting switch Q13 trips, the - Check wiring between IOEC 1, DI 3
message AuxFan 1/2 is displayed and the drive and Q13
shuts down - Check bearings and fan unit M13
ACS 1000 with two fans:
If one of the motor protecting switches Q13 or ACS 1000 with two fans:
Q14 trips, the alarm message AuxFan 1/2 is - Check motor protecting switch Q14
displayed and the healthy fan unit is switched - Check wiring between IOEC 4, DI 9
on and Q14
If both motor protecting switches trip, the - Check bearings and fan unit M14
message AuxFan 1/2 is displayed and the drive
shuts down
Related parameters:
P 41.06 REDUNDANT AUX. FAN INSTALLED
enables the 2nd. fan
- Motor protecting switch tripped or defective
- Loose or disconnected wire(s)
- Defective fan unit
Battery Battery voltage below 21.5 V - Check fuse (F114) on EPS board x 1a
Down - Check all battery connections for
- Blown fuse on EPS board tightness
- Loose battery connections - Check ribbon cable connection
- Loose ribbon cable between EPS and INT -Replace battery (see Chapter 9 - Pre-
board ventive Maintenance, Replacing Bat-
- Defective battery teries, page 9-5)
10-6 (of 40) 3BHS102768 ACS 1000 User’s Manual, Rev. E
Chapter 10 - Trouble Shooting and Repair
Table 10-1 Alarm and Fault Messages and Fault Rectification (Continued)
of Shut down
Alarm
Meaning of the Message
Type
Message Test and Rectification
- Possible Causes
Battery Miss Battery is not connected properly - Check fuse (F114) on EPS board x 1a
- Check all battery connections for
- Blown fuse on EPS board tightness
- Loose battery connections - Check ribbon cable connection
- Loose ribbon cable between EPS and INT
board
BChop Discr Braking Chopper Discrepancy - Call ABB service 2b
Message relates to optional braking chopper
Unbalance in chopper currents detected
- Defective component(s) in braking chopper
BChop Gusp Braking Chopper Gate Unit Power Supply - Call ABB service 2b
Message relates to optional braking chopper
- Defective gate control unit (GUSP)
- Defective power supply of GUSP
BChop Short Braking Chopper Short Circuit - Call ABB service 2b
Message relates to optional braking chopper
- Short circuit in braking chopper
BChop SW Braking Chopper Switching Frequency - Call ABB service x
Freq Message relates to optional braking chopper
Braking chopper is tripped but operation of
ACS 1000 is still possible
- Switching frequency is above trip level
BChop Temp Braking Chopper Temperature Hardware - If problem persists call ABB service x
HW Message relates to optional braking chopper
Response threshold of external thermal
protecting device reached (monitored via DI 4.4
on IOEC 4)
Braking chopper is switched off until
temperature is below trip threshold
Operation of ACS 1000 is still possible but
without braking ability (braking should be
possible again after approx. 30 minutes)
- Braking chopper overloaded
- Too many braking cycles within a short time
- Defective cable
- Underdimensioned braking chopper
ACS 1000 User’s Manual, Rev. E 3BHS102768 10-7 (of 40)
Chapter 10 - Trouble Shooting and Repair
Table 10-1 Alarm and Fault Messages and Fault Rectification (Continued)
of Shut down
Alarm
Meaning of the Message
Type
Message Test and Rectification
- Possible Causes
BChop Temp Braking Chopper Temperature Software - If problem persists call ABB service x
SW Message relates to optional braking chopper
Temperature limit of braking chopper exceeded
(monitored by software based thermal model)
Braking chopper is switched off until
temperature is below trip treshold.
Operation of ACS 1000 is still possible but
without braking ability (braking should be
possible again after approx. 30 minutes)
- Too many braking cycles within a short time
- Underdimensioned braking chopper
BrakChop Fan Braking Chopper Fan - Check motor protecting switch x
Message relates to optional braking chopper - Check cooling fan/pump
Braking chopper is tripped. Operation of - Check wiring connections
ACS 1000 is still possible but without braking
ability
- Motor protecting switch of external cooling
fan/pump tripped (monitored via DI 4.3 on
IOEC 4)
- Loose wire(s)
BrakChop Off Braking Chopper Off - If problem persists call ABB service x
Message relates to optional braking chopper
- Braking chopper is switched off due to a fault
BResi Temp Hi Braking Resistor Temperature High - If problem persists call ABB service x
Temperature limit of braking resistor exceeded
(monitored by software based thermal model)
Danger! Braking chopper is not switched off.
Operation of ACS 1000 is still possible with
braking ability
- Too many braking cycles within a short time
- Underdimensioned braking resistor
BrgDE Mlos Bearing Temperature Driven End Measurement - Check signal at AI 2 on IOEC3 (signal x S
Loss must be > 4mA or > 2V)
No signal at AI 2 on IOEC 3 - Check wiring between external tem-
Related parameter: perature measuring device and
P 35.01 BEARING TEMP PROTECTION DE ACS 1000
enables the protecting function and selects the - Check cable shielding and grounding
type of shut down - Check power supply of measuring de-
vice
- Signal below pre-set minimum value
- Loose or disconnected wire(s)
- Poor signal grounding
- Defective power supply of measuring device
- Defective temperature measuring device
10-8 (of 40) 3BHS102768 ACS 1000 User’s Manual, Rev. E
Chapter 10 - Trouble Shooting and Repair
Table 10-1 Alarm and Fault Messages and Fault Rectification (Continued)
of Shut down
Alarm
Meaning of the Message
Type
Message Test and Rectification
- Possible Causes
BrgNDE Mlos Bearing Temperature Non-Driven End - Check signal at AI 3 on IOEC3 (signal x S
Measurement Loss must be > 4mA or > 2V)
No signal at AI 3 on IOEC 3 - Check wiring between external tem-
Related parameter: perature measuring device and
P 35.04 BEARING TEMP PROTECTION NDE ACS 1000
enables the protecting function and selects the - Check cable shielding and grounding
type of shut down - Check power supply of measuring de-
vice
- Signal below pre-set minimum value
- Loose or disconnected wire(s)
- Poor signal grounding
- Defective power supply of measuring device
- Temperature measuring device defective
BrgTemp DE Bearing Temperature Driven End - Verify limit values x S
Temperature is monitored via AI 2 on IOEC 3. If - Check parameter settings
alarm level is exceeded, an alarm message is - Check measuring device
displayed. If trip level is exceeded, the drive - Check lubrication and bearing (refer
stops to motor manual)
Related parameter:
P 35.01 BEARING TEMP PROTECTION DE
enables the protecting function and selects the
type of shut down
P 35.02 BEARING TEMP DE ALARM LEVEL
P 35.03 BEARING TEMP DE TRIP LEVEL
- Wrong parameter settings
- Wrong signal from measuring device
- Lubrication or bearing problems
BrgTemp NDE Bearing Temperature Non-Driven End - Verify limit values x S
Temperature is monitored via AI 3 on IOEC 3. If - Check parameter settings
alarm level is exceeded, an alarm message is - Check measuring device
displayed. If trip level is exceeded, the drive - Check lubrication and bearing (refer
stops to motor manual)
Related parameters:
P 35.04 BEARING TEMP PROTECTION NDE
enables the protecting function and selects the
type of shut down
P 35.05 BEARING TEMP NDE ALARM LEVEL
P 35.06 BEARING TEMP NDE TRIP LEVEL
- Wrong parameter settings
- Wrong signal from measuring device
- Lubrication or bearing problems
ACS 1000 User’s Manual, Rev. E 3BHS102768 10-9 (of 40)
Chapter 10 - Trouble Shooting and Repair
Table 10-1 Alarm and Fault Messages and Fault Rectification (Continued)
of Shut down
Alarm
Meaning of the Message
Type
Message Test and Rectification
- Possible Causes
Buchholz Signal from transformer Buchholz relay - Check transformer according to the x 1b
The message represents either an alarm or a instructions in transformer manual
fault depending on the digital input: - Check wiring of Buchholz protecting
DI 4 on IOEC 3 generates an alarm circuit
DI 5 on IOEC 3 generates a fault
Related parameter:
P 36.05 TRAFO BUCHHOLZ PROTECTION
enables DI 4 and 5
- Loose or disconnected wire(s)
CH0 LinkEr Channel 0 Link Error - Check that parameter settings corre- x S
Related parameter: spond to the external communication
P 70.05 CH0 COM LOSS CTRL selects the interface
reaction on communcation loss - Check power supply of external com-
munication interface
- Communication time-out setting too short - Check connections and polarity of fi-
- Wrong parameter settings bre optics
- DDCS fiber optic cables are not properly con-
nected or have wrong polarity
- External communication interface connected
to CH0 interrupts the communcation
CH2 LinkEr Channel 2 Link Error - Check that parameter settings ac- x S
Related parameter: cording to master/follower manual are
P 70.14 CH2 COM LOSS CTRL selects the correct
reaction on communcation loss - Check that power supply is on
- Check connections and polarity of fi-
- Communication time-out too short bre optics
- Wrong parameter settings for master/follower
- DDCS fiber optic cables are not properly con-
nected or have wrong polarity
ChargeCirc Charging Circuit 2b
Malfunction in charging circuit
- Defective varistors in rectifier circuit
- Short circuit in protection IGCT (if an Overvolt
SW fault follows a Charge Circ fault, the pro-
tection IGCT can be the reason)
- Defective ADCVI, SVA or INT board
Charging Charging of intermediate DC circuit failed - Verify DC voltage levels measured by 2b
The DC voltage in both parts of the DC link ACS 1000
must be above 65% of the nominal voltage - Check that mains supply voltage is
level for normal operation within the permitted limits. See Ap-
pendix A - Technical Data.
- Defective charging resistors - Check that mains supply is stiff by
- Mains voltage low measuring all three phase to phase
- Defective ADCVI, SVA or INT board voltages
10-10 (of 40) 3BHS102768 ACS 1000 User’s Manual, Rev. E
Chapter 10 - Trouble Shooting and Repair
Table 10-1 Alarm and Fault Messages and Fault Rectification (Continued)
of Shut down
Alarm
Meaning of the Message
Type
Message Test and Rectification
- Possible Causes
CoSensDirty Conductivity Sensor Dirty - Remove, clean and install the sensor x
Cooling water conductivity sensor is dirty See also Chapter 9 - Preventive Main-
tenance, Checking Water Conductivi-
- Water conductivity above limit value ty, page 9-23
Cust Sup Sig 1 Customer Supervision Signal 1 x S
Act The customer supervision function can monitor 1a
selectable signals. The trip reaction can be 1b
selected.
Related parameter group: 48 (Customer
Supervision Function)
Cust Sup Sig 2 Customer Supervision Signal 2 x S
Act The customer supervision function can monitor 1a
selectable signals. The trip reaction can be 1b
selected.
Related parameter group: 48 (Customer
Supervision Function)
DirNotFwd Direction Not Forward - Check that parameter settings are x
Message relates to synchronized bypass correct
Related parameter:
P 11.03 DIRECTION must be set to 1
Discharging Discharging malfunction Note: the DC capacitors might have to 2b
be discharged manually using an
- Maximum discharging time exceeded appropriate method!
- Difference between the voltages of both parts
of the DC link is too big - Call ABB service
- Defective resistor(s)
- Defective ADCVI, SVA or INT board
Doing F IDR Filter ID run is in progress x
Doing ID Run Motor ID run is in progress x
EarthIso Ctrl Earthing Isolator Control - Check the control circuit 1b
- Check wiring and connections
- No feedback signal from earthing isolator - Verify that feedback signal corre-
- Malfunction in control circuit of earthing isola- sponds to the position of the earthing
tor isolator
- Loose or disconnected wire(s)
Emerg Off Stop from customer side 2b
The emergency off function can be activated
via fieldbus interface.
EmergStop Emergency Stop - Check emergency stop chain con- 2b
Related digital input: DI 5 on IOEC 1 nected to tripping loop terminals
X300. See wiring diagrams
- Emergency stop activated - Check wiring and connections
- Loose or disconnected wire(s)
ACS 1000 User’s Manual, Rev. E 3BHS102768 10-11 (of 40)
Chapter 10 - Trouble Shooting and Repair
Table 10-1 Alarm and Fault Messages and Fault Rectification (Continued)
of Shut down
Alarm
Meaning of the Message
Type
Message Test and Rectification
- Possible Causes
EPS Fault Electronic Power Supply Fault - Check supply voltage of EPS 2b
- Check + 20 VDC output of EPS
- 32 VAC from transformer T1 missing - Check ribbon cable between EPS and
- Defective EPS or INT board INT board
ExtAct1 Lost External Actual Signal 1 Lost - Check wire connections x S
Actual value of PID controller connected to AI 1 - Check analog signal with multimeter
on IOEC 4 is missing.
Related parameter:
P 40.15 MIN FUNCTION EXT ACT 1 selects
the reaction on signal loss
- Loose or disconnected wire(s)
- Signal below pre-set minimum level
ExtAct2 Lost External Actual Signal 2 Lost - Check wire connections x S
Actual value of PID controller connected to AI 2 - Check analog signal with multimeter
on IOEC 4 is missing.
Related parameter:
P 40.16 MIN FUNCTION EXT ACT 2 selects
the reaction on signal loss
- Loose or disconnected wire(s)
- Signal below pre-set minimum level
ExtMot Cool External Motor Cooling - Check motor temperature x S
Message relates to external motor cooling - Check cooling equipment, refer to ap-
protection plicable manual
DI 6 on IOEC 3 generates an alarm - Check wiring and connections
DI 7 on IOEC 3 stops the drive
Related parameter:
P 35.08 MOTOR COOLING PROTECTION
enables the function
- Fault in external motor cooling circuit
- Loose or disconnected wire(s)
ExtMotProt External Motor Protection - Check external motor protecting relay x 1b
Alarm signal is connected to DI 11 on IOEC 3 - Check that all trip limit settings are
Trip signal is connected to tripping loop and correctly set
monitored via DI 14 on IOEC 1 - Check wiring between external pro-
Related parameter: tecting relay and ACS 1000
P 35.07 EXT MOTOR PROTECTION ALARM - Check wiring to relay inputs
activates DI 11
- Alarm or trip level of external protecting de-
vice exceeded
- Loose or disconnected wire(s)
10-12 (of 40) 3BHS102768 ACS 1000 User’s Manual, Rev. E
Chapter 10 - Trouble Shooting and Repair
Table 10-1 Alarm and Fault Messages and Fault Rectification (Continued)
of Shut down
Alarm
Meaning of the Message
Type
Message Test and Rectification
- Possible Causes
ExtOverspeed Trip signal from external overspeed protecting - Check external overspeed protecting 1b
device, connected to tripping loop and device
monitored via DI 1 on IOEC 3. Signal can be - Check that all trip limit settings are
disabled by putting a jumper across the correctly set
terminals of DI 1 - Check wiring between external pro-
tecting device and ACS 1000
- Overspeed protecting device tripped - Check wiring to protecting device in-
- Loose or disconnected wire(s) puts
ExtRef1Lost External Reference 1 Lost - Check related parameters x S
No reference value 1 at AI 1 on IOEC 2 - Check wire connections
Related parameters: - Check analog signal with multimeter
P 31.03 MIN FUNCTION EXT REF 1selects
the reaction on signal loss
P 13.08 AI 1 MINIMUM IOEC 2
- Wrong parameter settings
- Loose or disconnected wire(s)
- Signal below pre-set minimum level
- Defective IOEC board
ExtRef2Lost External Reference 2 Lost - Check related parameters x S
No reference value 2 at AI 1 on IOEC 1 - Check wire connections
Related parameters: - Check analog signal with multimeter
P 31.04 MIN FUNCTION EXT REF 2selects
the reaction on signal loss
P 13.03 AI 1 MINIMUM IOEC 1
- Loose or disconnected wire(s)
- Signal below pre-set minimum level
- Defective IOEC board
ExtTrafProt External Transformer Protection - Check external protecting device 1b
Trip signal from external transformer protecting - Check that all trip limit settings are
device, connected to tripping loop (terminal correctly set
strip X300) and monitored via DI 13 on IOEC 1. - Check wiring between external pro-
Related parameter: tecting device and ACS 1000
P 36.01 TRAFO TEMP PROTECTION DI - Check wiring to protecting device in-
enables DI 13 puts
- Transformer protecting device tripped
- Loose or disconnected wire(s)
ExtWtrCool External Water Cooling - Check external water cooling system x S
Message relates to external cooling water - Check that all alarm and trip settings
protection are correct
Alarm signal is connected to DI 1 on IOEC 4 - Check wiring between external moni-
Trip signal is connected to DI 2 on IOEC 4 toring device and ACS 1000
- Alarm or trip level of external protecting de-
vice exceeded
- Loose or disconnected wire(s)
ACS 1000 User’s Manual, Rev. E 3BHS102768 10-13 (of 40)
Chapter 10 - Trouble Shooting and Repair
Table 10-1 Alarm and Fault Messages and Fault Rectification (Continued)
of Shut down
Alarm
Meaning of the Message
Type
Message Test and Rectification
- Possible Causes
FilCapCurr Filter Capacitors Current - Check capacitors for visible defects, 2a
Overcurrent in filter capacitors - Check motor, motor cables and sine
filter for short circuit
- Defective capacitors
- Short circuit in motor, motor cables or sine fil-
ter capacitors
- Defective ADCVI or SCA board
- Defective current transformers
Filt IDR Reqst Filter ID Run Request x
- One or more filter parameters are not set
Ground Cur Ground Current - Check complete drive system (trans- 2b
The earth fault function protects against earth former, ACS 1000, motor and power
faults in motor, motor cable, transformer cables)
secondary or inverter. The function is based on
measuring the current in the earth connection
of the star point of sine filter capacitors to
ground
- Earth fault
- Defective current transducer
- Defective ADCVI board
- Defective SCA subboard
- Defective INT board
Ground Fault Ground fault detected - Check complete drive system (trans- 3
The earth fault function protects against earth former, ACS 1000, motor and power
faults in motor, motor cable, transformer cables)
secondary or inverter. The function is based on
measuring the current in the earth connection
of the star point of sine filter capacitors to
ground
- Earth fault
- Defective current transducer
- Defective ADCVI board
- Defective SCA subboard
- Defective INT board
10-14 (of 40) 3BHS102768 ACS 1000 User’s Manual, Rev. E
Chapter 10 - Trouble Shooting and Repair
Table 10-1 Alarm and Fault Messages and Fault Rectification (Continued)
of Shut down
Alarm
Meaning of the Message
Type
Message Test and Rectification
- Possible Causes
GUSP 1 Gate Unit Power Supply 1 malfunction - Call ABB service 2b
Internal software protection
The GUSP 1 supplies the "upper" IGCTs of the
inverter (V1U, V2U, V1V, V2V, V1W, and
W2W). The GUSP indicates a fault either if its
supply voltage drops below 21.5V or if the
internal chopper transformer switches only in
one of the two primary windings
The GUSP board transmitts a monitoring signal
through a fiber-optic cable to the INT board. A
fault condition is present, if no signal is
transmitted. If only one transformer winding
switches, the light signal changes to a high
frequency
The trip reaction on a GUSP failure cannot be
deactivated by parameter
- Supply voltage from ESP board below 21.5V
- Defective gate unit internal transformer
- Defective INT board
GUSP 2 Gate Unit Power Supply 2 malfunction - Call ABB service 2b
Internal software protection
The GUSP 2 supplies the "lower" IGCTs of the
inverter (V3U, V4U, V3V, V4V, V3W, and
W4W). The GUSP indicates a fault either if its
supply voltage drops below 21.5V or if when
the internal chopper transformer switches only
in one of the two primary windings
The GUSP board transmitts a monitoring signal
through a fiber-optic cable to the INTerface
board. A fault condition is present, if no signal
is transmitted. If only one transformer winding
switches, the light signal changes to a high
frequency
The trip reaction on a GUSP failure cannot be
deactivated by parameter
- Supply voltage from ESP board below 21.5V
- Defective gate unit internal transformer
- Defective INT board
GUSP1 Cur The standby current of Gate Unit Power Supply - Check the GUSP 2b
1 is too high - Check the IGCT
- Gate Unit is defective - Check the EPS board
- One of the IGCTs is defective
- EPS board is defective
ACS 1000 User’s Manual, Rev. E 3BHS102768 10-15 (of 40)
Chapter 10 - Trouble Shooting and Repair
Table 10-1 Alarm and Fault Messages and Fault Rectification (Continued)
of Shut down
Alarm
Meaning of the Message
Type
Message Test and Rectification
- Possible Causes
GUSP2 Cur The standby current of Gate Unit Power Supply - Check the GUSP 2b
2 is too high - Check the IGCT
- Gate Unit is defective - Check the EPS board
- One of the IGCTs is defective
- EPS board is defective
Heater Miniature circut breaker of motor heater or - Measure heater circuit resistance x
cabinet heater tripped. Monitored via DI 12 on - Check miniature circuit breakers Q22
IOEC 1 and Q23
Related parameter: - Check parameter settings
P 38.01 MOTOR HEATER and P 38.04 - Check wiring
CABINET HEATER have to be set to YES, if
motor and cabinet heater are installed
- Current too high or short circuit
- Wrong parameter settings
- Loose or disconnected wire(s)
ID Run Fault ID run not successfull - Verify parameter settings in parame- 1a
ter group 99 2b
- One or more of the motor parameters are - Repeat ID run
wrong
ID RunReqst ID Run Request x
Drive is started up for the first time without ID
run
Alarm is reset if ID run is selected
ID RunStop ID run is stopped by the user by entering a stop x
command
The alarm does not appear on the display but
can only be seen in the fault buffer. The alarm
is followed by the message “ID RunReqst”
IGCT Fault A defective IGCT has been detected during 2b
start-up
InpIsolDis Input Isolator Feedback Discrepancy - Check wiring and connections x
Feedback signals are monitored via DI 7 and 8 - Verify that feedback signal corre-
on IOEC 4 sponds to the position of the input iso-
Related parameter: lator
P 37.03 EXT INPUT ISOLATOR has to be set - Check parameter settings
to NO, if there is no input isolator
- No feedback signal from input isolator
- Malfunction of input isolator
- Loose or disconnected wire(s)
- Wrong parameter settings
10-16 (of 40) 3BHS102768 ACS 1000 User’s Manual, Rev. E
Chapter 10 - Trouble Shooting and Repair
Table 10-1 Alarm and Fault Messages and Fault Rectification (Continued)
of Shut down
Alarm
Meaning of the Message
Type
Message Test and Rectification
- Possible Causes
InpVoltUnba Input Voltage Unbalance - Check input mains voltage 1b
The normally closed contact of an optional - Check auxiliary power supply for pro-
external protecting relay monitoring the input tecting relay
voltage is connected to the tripping loop and - Check protecting relay settings
monitored via DI 13 on IOEC 3. The function - Check wiring and connections
can be disabled by putting a jumper across the
coressponding terminals (see wiring diagrams)
- Supply phase lost or voltage unbalanced
- Power supply of voltage protecting relay
down
- Loose or disconnected wire(s)
Inv Curr HW Inverter Current Hardware - Check drive load 2a
Inverter output current limit is exceeded. - Check accelaration time and corre-
Overcurrent is detected by ADCVI board. sponding parameter settings
ADCVI board sends a signal via INT board to - Check motor cable connections
AMC3 board - Check that the fiber optic cables be-
tween the ADCVI and the INT board
- Load. Motor load and ACS 1000 must be are properly connected
properly matched to ensure correct operation
throughout the speed range
- Acceleration time. If the overcurrent fault oc-
curs during acceleration, the acceleration
time may be too short for the load and drive
ratings.
- Cables.The motor cable connections may
have stray currents which induce an overcur-
rent trip. In most cases, this fault is described
as intermittent and only when outside influ-
ences around the motor or drive cables are
present
- Current transformers.The current transform-
ers are used to measure the inverter output
current
- Fiber optic link
- Defective ADCVI board
- Defective SCA board
- Defective INT board
ACS 1000 User’s Manual, Rev. E 3BHS102768 10-17 (of 40)
Chapter 10 - Trouble Shooting and Repair
Table 10-1 Alarm and Fault Messages and Fault Rectification (Continued)
of Shut down
Alarm
Meaning of the Message
Type
Message Test and Rectification
- Possible Causes
InvCurrSOA Inverter Current Safe Operating Area - Check that the flash SW is compatible 2a
The inverter output current is too high for the ACS1000 converter type
Software and hardware based protection - Measure the input supply voltage.
The semiconductors are protected when being Measure all three phase to phase volt-
operated outside the safe operation area, i.e. ages under normal operation. Verify
when the DC link voltage is higher than in the results.
normal operation. The inverter output current - Verify that the cable connections are
and the DC link voltage are measured by the tight and properly grounded and
ADCVI board, which sends the data via the INT shielded
board to the AMC3 board - Check that motor and drive are cor-
Read the fault logger first to find out the primary rectly dimensioned
cause. If only fault "InvCurrSOA" exists in the - Check if the fault only occurs during
fault logger, the reason can be one of the listed acceleration. Increase the accelera-
below. The "InvCurrSOA" fault can also follow tion time if necessary
another fault. In this case read also the - Check fault history buffer for other re-
definition of the fault(s) preceding the lated error messages
"InvCurrSOA" fault
- Wrong flash software
- Mains supply
- Cabling
- Defective current transformer
- Loading
- Acceleration time
- Defective ADCVI board
- Defective SVA or SCA subboard
- Defective INT board
IOEC1LinkEr IOEC 1 Link Error - Check communications related pa- 1b
The DDCS communication channel CH1 is not rameter settings
updated by the IOEC1 board within a specified - Check node number of IOEC board
time - Check fiber optic link
The Distributed Drive Communication System
(DDCS) is a communication protocol used
between the AMC3 board and peripheral
boards, such as IOEC boards. The IOEC
boards are connected to channel CH1 in a ring
via the fiber optic bus. The DDCS link uses
high speed communication (8Mbit/s) for this
function
- Wrong parameter settings
- Wrong node number of IOEC board
- Optic link interrupted
- Defective IOEC board
- Defective AMC board
IOEC2LinkEr See IOEC1LinkEr See IOEC1LinkEr 1b
IOEC3LinkEr See IOEC1LinkEr See IOEC1LinkEr 1b
IOEC4LinkEr See IOEC1LinkEr See IOEC1LinkEr 1b
10-18 (of 40) 3BHS102768 ACS 1000 User’s Manual, Rev. E
Chapter 10 - Trouble Shooting and Repair
Table 10-1 Alarm and Fault Messages and Fault Rectification (Continued)
of Shut down
Alarm
Meaning of the Message
Type
Message Test and Rectification
- Possible Causes
IOEC5LinkEr See IOEC1LinkEr See IOEC1LinkEr 1b
IOEC6LinkEr See IOEC1LinkEr See IOEC1LinkEr 1b
LimitSuperv Some actual and reference signals are - Check limit settings in parameter x
monitored for limit values. If one of the signals group 32 SUPERVISION
is at the pre-set limit the alarm comes up
Link AB Lost The Power Plate Communication System - Check optical link for proper connec- 2b
(PPCS) is used as a communication protocol tions and polarity
between the AMC3 board and the INT board.
The boards are connected via two fiber optic
PPCS links. An interruption in one of the
communication links is detected by the control
SW of the AMC3 board and a trip is initiated.
Two LED's on the INT board indicate when
data is transferred in the links A and B
- Interrupted optic link
- Defective INT board
- Defective AMC board
Link C Lost The communication between the INT board - Check optical link for proper connec- 2b
and the ADCVI board uses three PPCS links tions and polarity
and three unidirectional signal links. Link C is
connected to the ADCVI board and monitored
by the EPLD logic located on the INT board. If
link C is lost a trip is initiated. "A1" and "A8"
fiber optic connectors on the ADCVI board
belong to link C
- Interrupted optic link
- Defective ADCVI board
- Defective INT board
Link D Lost See Link C Lost See Link C Lost 2b
Link E Lost See Link C Lost See Link C Lost 2b
ACS 1000 User’s Manual, Rev. E 3BHS102768 10-19 (of 40)
Chapter 10 - Trouble Shooting and Repair
Table 10-1 Alarm and Fault Messages and Fault Rectification (Continued)
of Shut down
Alarm
Meaning of the Message
Type
Message Test and Rectification
- Possible Causes
LS Print Mi LS Print Minus - Ckeck wiring between the VLSCD 2 1b
Inverter short circuit protection board and the di/dt choke (Ls2)
Short circuit protection in the DC link plus and - Check that the fiber optic connectors
minus circuit is established by monitoring the between the VLSCD 2 and the INT
voltage across a di/dt choke by means of the board are tight
VLSCD board. If the measured voltage is
higher than a specified limit value, the board
sends a light pulse via a fiber optic to the INT
board. If the transmit time of the light signal
exceeds a programmed time, a short circuit
condition is detected by the INT board. Each
time an IGCT is turned on, the VLSCD board
should send a short light pulse. If the INT board
does not receive the light pulse, either a "LS
Print Pl" or "LS Print Mi" fault is present
The "LS Print Mi" fault is in the DC link minus
circuit
- Loose connector. Wiring between the
VLSCD2 board and the di/dt choke (Ls2) may
have a loose connection
- Optic link
- Defective VLSCD 2 board
- Defective INT board
LS Print Pl LS Print Plus - Ckeck wiring between the VLSCD 1 1b
Inverter short circuit protection board and the di/dt choke (Ls2)
Short circuit protection in the DC link plus and - Check that the fiber optic connectors
minus circuit is established by monitoring the between the VLSCD 1 and the INT
voltage across a di/dt choke by means of the board are tight
VLSCD board. If the measured voltage is
higher than a specified limit value, the board
sends a light pulse signal via a fiber optic to the
INT board. If the transmit time of the light signal
exceeds a programmed time, is detected by the
INT board. Each time an IGCT is turned on, the
VLSCD board should send a short light pulse. If
the INT board does not receive the light pulse,
either a "LS Print Pl" or "LS Print Mi" fault is
present
The "LS Print Pl" fault is in the DC link plus
circuit
- Loose connector. Wiring between the
VLSCD1 board and the di/dt choke (Ls2) may
have a loose connection
- Optic link
- Defective VLSCD 1 board
- Defective INT board
10-20 (of 40) 3BHS102768 ACS 1000 User’s Manual, Rev. E
Chapter 10 - Trouble Shooting and Repair
Table 10-1 Alarm and Fault Messages and Fault Rectification (Continued)
of Shut down
Alarm
Meaning of the Message
Type
Message Test and Rectification
- Possible Causes
MacroChange Alarm message is displayed while new macro - Do not switch on the MCB while mac- x 1b
is loaded. ro is changed
MCB is monitored while macro is changed
- If “MacroChange” is active and MCB ON com-
mand is set, the ACS 1000 shuts down ac-
cording to a trip 1b.
MCB Control ACS 1000 is unable to operate the main circuit - Check that parameter settings are 2b
breaker correct and correspond to the MCB
Related parameter group: control interface
21 START/STOP/MCB FUNCTION - Check MCB functions according to
the MCB user’s manual and circuit di-
- Wrong parameter settings agram
- MCB tripped or in test position - Check external wiring and shielding
- Malfunction of MCB
- Loose or disconnected wire(s)
- Control cables shields not properly grounded
MCB Discrep The alarm MCB Discrepancy comes up, if the - Check that parameter settings are x
feedback signals ‘open’ and ‘close’ from the correct and correspond to the MCB
main circuit breaker are both high or low control interface
- Check MCB functions according to
- Wrong parameter settings the MCB user’s manual and circuit di-
- Malfunction of MCB agram
- Loose or disconnected wire(s) - Check external wiring and shielding
MCB Disturb MCB Disturbance - Check tripping loop 2b
Main circuit breaker opens while drive is in
operation
- One or more contacts in the tripping loop are
open
- One of the following faults are active:
"ShortCircuit", "SelfExitSW", "SelfExitHW",
"FiltCapCurr", "ShortCirPl", "ShortCirMin or
"GroundFault"
MCB NotAvl MCB Not Available - Check MCB operation according to x
The corresponding feedback signal from the MCB user’s manual and circuit dia-
main circuit breaker is missing. Feedback gram
signal is enabled by P 21.08 MCB AVAILABLE - Check external wiring and shielding
SIGNAL
- The MCB is in test position, not operational or
racked out
- Loose or disconnected wire(s)
ACS 1000 User’s Manual, Rev. E 3BHS102768 10-21 (of 40)
Chapter 10 - Trouble Shooting and Repair
Table 10-1 Alarm and Fault Messages and Fault Rectification (Continued)
of Shut down
Alarm
Meaning of the Message
Type
Message Test and Rectification
- Possible Causes
MotCooler Miniature cicuit breaker Q21 tripped - Check and reset Q21. Check that trip x S
The auxiliary contact of Q21 is monitored via setting corresponds to the motor cool-
DI 12 on IOEC 3 er current
Related parameter: - Check that cables and wires are prop-
P 38.02 MOTOR COOLER enables the erly connected and that all terminals
function and selects the alarm or shut down are tightened
- Loose or disconnected wire(s)
- Fault in external cooler circuit
Mot Overload Software based protection function, monitors - Verify overload curve parameters x S
over/underload of the motor. - Verify that driven equipment works
If activated, the actual RMS motor current is properly
continuously compared with alarm and trip
limits set in a load curve.
If the RMS value of the motor current stays
above the set overload alarm curve longer than
the specified delay time an alarm comes up.
If the RMS value of the motor current stays
above the set overload trip curve longer than
the specified delay time the drive is stopped.
Related message: “Mot Underload”.
Related parameter group:
P 42 LOAD PROTECTION
- The actual RMS motor current is outside the
operating range specified in the load curve.
- Overload curve parameters are not set cor-
rectly
Mot Phase L Motor Phase Loss - Check all motor cables and connec- 1b
The phase loss function monitors the motor tions
cable connections by measuring the converter - Check motor contactors and safety
output currents. If a phase is detected to be switches
missing, the drive does not start or shuts down - Try to avoid continuous operation at
during operation low frequency. If necessary make
SW function - motor phase loss tests to prove that low speed is not the
cause of the fault
- Motor cables and connections
- Defective Current transformer
- Defective SCA subprint
- Defective ADCVI board
- Low speed. If the motor runs continuously
with a frequency just above the monitoring
frequency threshold, the motor phase current
may cause an unnecessary trip condition
10-22 (of 40) 3BHS102768 ACS 1000 User’s Manual, Rev. E
Chapter 10 - Trouble Shooting and Repair
Table 10-1 Alarm and Fault Messages and Fault Rectification (Continued)
of Shut down
Alarm
Meaning of the Message
Type
Message Test and Rectification
- Possible Causes
Mot Phase Motor Phase Unbalanced - Check all motor cables and connec- x S
Unbal If the function is activated and the motor tions
frequency is above 5 Hz the three phases of - Check motor contactors and safety
the motor cables are monitored for equal switches
current loading to prevent overheating of the - Verify parameters
cable. If the maximum permissible current
difference between two motor phases exceeds
the parameter adjustable alarm limit an alarm
comes up and if the current difference exceeds
the programmable trip limit the drive stops.
Related parameter group:
P 43 ESP PROTECTION FUNCTION.
- Motor cables and connections
- Defective Current transformer
- Defective SCA subprint
- Defective ADCVI board
- Wrong parameter settings
Mot Prot SW Motor Protection Software - Verify that the parameter settings are 1a
The 3-phase RMS value of the motor current is correct and correspond to the motor
monitored and compared with 3 adjustable and load values
thresholds. A pickup delay for each threshold - Check motor loadability curve to see
can also be set. In case of an overload if loading at low speeds is permitted
condition the message Mot Prot SW is for the motor
displayed and the drive shuts down - Check that the dimensioning of the
Related parameters: motor and drive are correct
P 30.07....P 30.09 MOTOR PROT CURRENT
LEVEL set the current threshold
P 30.10...P 30.12 MOTOR PROT TIME
determine the pickup delay
- Wrong parameter settings
- Continuous operation at low speeds
- Drive loading
ACS 1000 User’s Manual, Rev. E 3BHS102768 10-23 (of 40)
Chapter 10 - Trouble Shooting and Repair
Table 10-1 Alarm and Fault Messages and Fault Rectification (Continued)
of Shut down
Alarm
Meaning of the Message
Type
Message Test and Rectification
- Possible Causes
MotorStall The motor stall function protects the motor - Check the loading near the stall area x 2a
against overheating by monitoring the output by lowering the stall frequency tempo-
frequency and the output current rarily (P 30.14). Start the cycle to see
Related parameters: if the fault is removed. Be careful not
P 30.13 STALL FUNCTION enables the to overheat the motor
function and selects the alarm or shut down. - Check that the motor and the convert-
If the output frequency is lower than the er are correctly dimensioned and
permitted limit, set in P 30.14 STALL FREQ HI, match the required load
and the current is close to its high limit, a - Check the normal load of the drive
counter in the software is started. If the counter and verify the proper functioning of
reaches a preset time limit, set in P 30.15 the driven equipment and the motor
STALL TIME a fault or warning is activated, bearings
depending on P 30.13
- Wrong parameter settings
- Drive loading
- Driven equipment
Mot Underload Software based protection function, monitors - Verify underload curve parameters x S
over/underload of the motor. - Verify that driven equipment works
If activated, the actual RMS motor current is properly
continuously compared with alarm and trip
limits set in a load curve.
If the RMS value of the motor current stays
below the set underload alarm curve longer
than the specified delay time an alarm comes
up.
If the RMS value of the motor current stays
below the set underload trip curve longer than
the specified delay time the drive is stopped.
Related message: “Mot Overload”.
Related parameter group:
P 42 LOAD PROTECTION
- The actual RMS motor current is outside the
operating range specified in the load curve.
- Underload curve parameters are not set cor-
rectly
MotVibrat Motor Vibration - Check motor and bearings x 1a
A external contact connected to DI 9 on IOEC 3 - Check vibration protecting device
stops the drive if opened - Check wiring and connections
Related parameter:
P 35.09 VIBRATION PROTECTION enables
the function
- Motor vibrations
- Defective vibration protecting device
- Loose or disconnected wire(s)
10-24 (of 40) 3BHS102768 ACS 1000 User’s Manual, Rev. E
Chapter 10 - Trouble Shooting and Repair
Table 10-1 Alarm and Fault Messages and Fault Rectification (Continued)
of Shut down
Alarm
Meaning of the Message
Type
Message Test and Rectification
- Possible Causes
MotWdg MLos Motor Winding Measurement Loss - Check signal level at analog inputs x S
At least one of 3 temperature signals is lost or (signal must be > 4mA or > 2V)
below a set minimum value. The corresponding - Check wiring between external tem-
analog inputs for the temperature signals on perature sensors and ACS 1000
IOEC 2 are: - Check cable shielding and grounding
AI 2 for phase U - Check power supply of measuring de-
AI 3 for phase V vice
AI 4 for phase W
The reaction of the drive, if a signal is lost, can
be selected for each temperature in parameter:
P 30.02 for phase U
P 30.03 for phase V
P 30.04 for phase W
- Signal below pre-set minimum value
- Loose or disconnected wire(s)
- Poor signal grounding
- Defective power supply of measuring device
- Defective temperature measuring device
MotWdg Temp Motor Winding Temperature Hardware - Check motor cooling fan or motor x S
HW The motor winding temperature is too high. The cooling pump for proper functioning
temperature in phase U, V and W is monitored and their protecting devices
by PT100 or PTC sensors. A 4...20 mA signal - Check temperature of the coolant and
of each phase is connected to AI 2, 3 and 4 on make adjustments if the temperature
IOEC 2 is too high
P 30.05 MOT TEMP ALM L sets alarm limit - Check that motor and drive are cor-
P 30.06 MOT TEMP TRIP L. sets trip limit rectly dimensioned. Check that torque
P 30.01 EXT MOTOR THERM PROT selects and power limits of the drive are prop-
the reaction of the drive, if the limits are erly set
exceeded - Check that overtemperature alarm
and trip limits are correctly set
- Motor cooling not sufficient
- Motor temperature too high
- Overload condition
- Wrong parameters settings
NoCurOffset No Current Offset - Disconnect main supply. When the 2b
The ACS 1000 is started before the current DC link is deenergized close the
offset is calibrated grounding switch. The auxiliary volt-
age must be on. Switch off the auxilia-
- No offset ry voltage and wait until the power
- Grounding switch supply for AMC3 is turned off. Switch
on the auxiliary voltage. When the
grounding switch is closed, the
ACS1000 automatically calibrates the
current measurement and sets the off-
set.
ACS 1000 User’s Manual, Rev. E 3BHS102768 10-25 (of 40)
Chapter 10 - Trouble Shooting and Repair
Table 10-1 Alarm and Fault Messages and Fault Rectification (Continued)
of Shut down
Alarm
Meaning of the Message
Type
Message Test and Rectification
- Possible Causes
NoFiltData No Filter Data - Enter filter data 2b
The fault appears, if the ACS1000 is started
before the filter data are entered in parameter
group 112
- Flash memory
NoMotorData Motor data are missing or wrong - Check that the motor data parameters 2b
in group 99 correspond to the data on
- Wrong parameter settings the motor rating plate
OffsetToo Big Current offset calibration not successful The 2b
currrent offset is too big
- Defective ADCVI board
- Defective current transformer
OS Fault Operating System Fault - Turn the power off. Check that the 2b
AMC3 board is also switched off (
- Flash memory. An error in the application soft- LED 'P' is off)
ware in the flash memory or an error during - Switch the power on again and restart
download from the flash memory may have the ACS 1000
occurred
OutpIsolDis Output Isolator Feedback Discrepancy - Check wiring and connections x
The feedback signals from an output isolator - Verify that feedback signal corre-
are monitored via DI 5 and DI 6 on IOEC 4. sponds to the position of the output
Related parameter: isolator
P 37.02 EXT OUTPUT ISOLATOR enables the - P 37.02 has to be set to NO, if there is
function no output isolator
- No feedback signal from output isolator
- Malfunction of output isolator
- Loose or disconnected wire(s)
- Wrong parameter settings
OutsAirMLos Outside Air Temperature Measurement Loss - Measure actual signal at the analog x S
The analog signal of an outside air temperature input on IOEC 3. If the signal is below
is monitored via AI 4 on IOEC 3. Signal loss is 2 mA, the auxiliary power supply of
detected, if the actual signal decreases below the transmitters may be defective
2 mA. - If signal is missing, check the wiring
Related parameter: between the measuring device and
P 37.04 OUTSIDE AIR TEMP PROTECTION the ACS 1000
enables the function and selects the alarm or - Check the auxiliary power supply of
fault the measuring device
- Measuring circuit
10-26 (of 40) 3BHS102768 ACS 1000 User’s Manual, Rev. E
Chapter 10 - Trouble Shooting and Repair
Table 10-1 Alarm and Fault Messages and Fault Rectification (Continued)
of Shut down
Alarm
Meaning of the Message
Type
Message Test and Rectification
- Possible Causes
OutsAirTemp Outside Air Temperature - Measure the temperature with anoth- x S
The analog signal of an outside air temperature er temperature meter. Compare the
is monitored via AI 4 on IOEC 3 by comparing value with the trip limit (P 37.06). If
the signal against an alarm and a trip limit. the temperature is higher than al-
Related parameters: lowed, improve the cooling
P 37.05 OUTSIDE AIR TEMP ALM L sets the - Read the temperature actual values in
alarm limit P 80.04 and P 80.08. Measure the an-
P 37.06 OUTSIDE AIR TEMP TRIP L sets the alog signal at IOEC 3 and verify that
trip limit the measured signal corresponds to
P 37.04 OUTSIDE AIR TEMP PROTECTION the actual temperature displayed in
enables the function and selects the alarm or P 80.04 and P 80.08
fault - If signal is missing, check the wiring
between the measuring device and
- Temperature the converter. Check also the auxiliary
- Measuring circuit power supply of measuring device
Overspeed Motor overspeed - Check that the minimum and maxi- 1b
Software based protection feature mum speed limits are correctly set:
The motor speed exceeds the limit defined in P 12.04 EXT REF1 MINIMUM
P 20.11 FREQ TRIP MARGIN and P 20.02 P 12.05 EXT REF1 MAXIMUM
MAXIMUM SPEED and P 20.01 MINIMUM P 20.01 MINIMUM SPEED
SPEED P 20.02 MAXIMUM SPEED
P 50.01 SPEED SCALING
- Wrong parameter settings - Check that all values in parameter
- Driven equipment. The motor is forced by the group 99 START-UP DATA are cor-
process to rotate too fast rectly set and correspond to the motor
nameplate data. Especially the nomi-
nal speed (P 99.05) is important.
EXAMPLE:
Required speed:1600...1700,
forward direction, 4 pole motor
Parameter settings:
P 12.04 EXT REF1 MINIMUM = 1600
rpm
P 12.05 EXT REF1 MAXIMUM = 1700
rpm
P 20.01 MINIMUM SPEED = 1400 rpm
P 20.02 MAXIMUM SPEED = 1700 rpm
P 20.11 FREQ TRIP MARGIN = 50Hz
The overspeed fault will only occur, if
the speed exceeds 3200 rpm
(=1700+1500) in forward direction or -
100 rpm (=1400-1500) in reverse
direction
- Check the normal load of the drive
and verify that the driven equipment
functions properly and is dimensioned
correctly.
ACS 1000 User’s Manual, Rev. E 3BHS102768 10-27 (of 40)
Chapter 10 - Trouble Shooting and Repair
Table 10-1 Alarm and Fault Messages and Fault Rectification (Continued)
of Shut down
Alarm
Meaning of the Message
Type
Message Test and Rectification
- Possible Causes
Overvoltage Overvoltage condition in DC circuit when the - If the alarm occurs even when the x
drive is “Ready to start” drive is “Ready to start”, the supply
voltage is probably too high. Check
- Mains supply the inverter measured DC voltage lev-
- Defective ADCVI board els. Read parameters:
- DefectiveSVA subboard P 02.02 DC VOLTAGE Udc1
- Defective INT board P 02.04 DC VOLTAGE Udc2
P 02.06 DC VOLTAGE Udc1 + Udc2
Measure the input voltages phase to
phase under normal operation. Verify
the results
OvervoltHW Overvoltage Hardware - If the alarm occurs even when the 2b
The intermediate DC voltage is not within the drive is “Ready to start”, the supply
specified voltage range voltage is probably too high. Check
the inverter measured DC voltage lev-
- Mains supply voltage els. Read parameters:
- Protection IGCT. The protection IGCT can P 02.02 DC VOLTAGE Udc1
have a short. and when charging the DC link, P 02.04 DC VOLTAGE Udc2
the voltage overshoot causes this fault. If an P 02.06 DC VOLTAGE Udc1 + Udc2
"OvervoltHW" fault follows a "Charging" fault Measure the input voltages phase to
the protection IGCT may be the reason phase under normal operation. Verify
- Optic link the results
- Defective ADCVI board - Check and measure the charging cir-
- Defective SVA subboard cuit. Replace the IGCT with its gate
- Defective INT board unit
- Braking chopper malfunction. The DC voltage - Check that the fiber optic cables be-
is increased during braking until the braking tween the ADCVI and the INT board
chopper is activated are properly connected
OvervoltSW Overvoltage Software See Overvolt HW 2b
Read the fault logger first. If only an
"OvervoltSW" fault exists, the reason can be
one of the listed below. The "OvervoltSW" fault
can also follow another fault. Read also the
definition of the fault(s) preceding the
"OvervoltSW" fault
- Mains supply voltage
- Protection IGCT. If the protection IGCT has a
short and the DC link is charged, the voltage
overshoot causes this fault. If an "Over-
voltSW" fault follows a "Charging" fault, the
protection IGCT may be the reason
- Defective ADCVI board
- Defective SVA subboard
- Defective INT board
- Braking chopper malfunction. The DC voltage
is increased during braking until the braking
chopper is activated
10-28 (of 40) 3BHS102768 ACS 1000 User’s Manual, Rev. E
Chapter 10 - Trouble Shooting and Repair
Table 10-1 Alarm and Fault Messages and Fault Rectification (Continued)
of Shut down
Alarm
Meaning of the Message
Type
Message Test and Rectification
- Possible Causes
Panel Lost The communication to the CDP 312 control - Check that the cable from AMC3 x 2b
panel is interrupted board via NDPI to the control panel is
If the drive is in torque control mode and if the properly connected
control panel is the active control station and
the communication is lost, the drive shuts
down. If the drive is controlled from an external
control station and the keypad is selected as
control station, the drive is shuts down as well.
In any other mode only an alarm is initiated
- Loose connection
Press Stop The alarm is displayed after the Filter ID run Press the STOP key on the CDP 312 x
has been completed control panel
ProcessStop External process stop signal or run permissive - Check the external process stop cir- x 2b
Signal is connected to DI 2.8 on IOEC 2 or cuit
received via serial communications interface - Check wiring and connections
Related parameters:
P 16.01 PROCESS STOP activates and
selects the signal source
P 21.03 PROCESS STOP selects stop mode
P 21.04 PROCESS STOP MCB MODE selects,
if MCB opens or stays closed after a process
stop command
P 21.05 PROCESS STOP SPEED DIF
monitors the deceleration of the drive
- Process stop
- Loose or disconnect wire(s)
ACS 1000 User’s Manual, Rev. E 3BHS102768 10-29 (of 40)
Chapter 10 - Trouble Shooting and Repair
Table 10-1 Alarm and Fault Messages and Fault Rectification (Continued)
of Shut down
Alarm
Meaning of the Message
Type
Message Test and Rectification
- Possible Causes
Pump 1/2 Cooling pump malfunction ACS 1000 with one pump: x 1b
ACS 1000 with one pump: If motor protecting - Check motor protecting switch Q11
switch Q11 trips, the message Pump 1/2 is - Check wiring between IOEC 1, DI 1.1
displayed and the drive is shut down and Q11
ACS 1000 with two pumps: If one of the motor - Check pump bearings and pump
protecting switches Q11 or Q12 trips, the alarm M11for possible overload
message Pump 1/2 is displayed and the
healthy pump is switched on ACS 1000 with two pumps:
If both motor protecting switches trip, the - Check motor protecting switch Q12
message Pump 1/2 is displayed and the drive - Check wiring between IOEC 1, DI 1.2
is shut down and Q12
Q11 is monitored via DI 1.1 on IOEC 1 - Check pump bearings and pump M12
Q12 is monitored via DI 1.2 on IOEC 1 for possible overload
Related parameters:
P 41.09 WATER COOLING PUMP
SELECTION activates the selected water
cooling pump
P 41.10 PUMP ALARM RESET is used to reset
the alarm
- Motor protecting switch tripped or defective
- Loose or disconnected wire(s)
- Defective pump
RideThrough The ride-through function keeps the drive in - Check if the parameters are set prop- x 2b
operation if the mains power is interrupted. The erly
function uses the kinetic energy of the rotating - Check the inverter measured DC volt-
motor and load to maintain the DC voltage. ages. Read parameters:
If the ride-through function is activated and the P 2.02 DC VOLTAGE Udc1
DC link voltage decreases below 80 %, the P 2.04 DC VOLTAGE Udc2
alarm message RideThrough is displayed. P 2.06 DC VOLTAGE Udc1 + Udc2
If the DC voltage stays below 80 % and the Measure the input voltages phase to
maximum ride-through time is elapsed or the phase under normal operation. Verify
speed derceases below the minimum speed the results. If power interruption are
limit, the fault massage RideThrough is frequent, monitor the DC voltage us-
displayed and the drive shuts down ing the DriveWindow tool or monitor
Related parameters: the supply voltage by means of a net-
P 39.01 RIDE THROUGH ENABLE activates work analyzer
the ride-through function
P 39.02 RIDE THROUGH TIME defines the
maximum ride-through time
P 39.03 RIDE THROUGH MIN SPEED defines
the minimum speed limit during ride-through
- Wrong parameter settings
- Duration of power interruption too long
- Defective ADCVI board
- Defective SVA subboard
- Defective INT board
10-30 (of 40) 3BHS102768 ACS 1000 User’s Manual, Rev. E
Chapter 10 - Trouble Shooting and Repair
Table 10-1 Alarm and Fault Messages and Fault Rectification (Continued)
of Shut down
Alarm
Meaning of the Message
Type
Message Test and Rectification
- Possible Causes
Sbp1Control Message relates to the synchronized bypass - Check parameter settings: x 2a
function P 65.06 BRK CLOSING TIME LIMIT
ACS 1000 is unable to operate bypass circuit P 65.07 BRK OPENING TIME LIMIT
breaker Sbp(i) compare settings with Sbp(i) specifi-
Related digital input: DI 5.14 on IOEC 5 cations
An alarm comes up, if the bypass circuit breaker - Check functioning of Sbp(i) according
does not open after the command Stop motor to Sbp(i) user manual and circuit dia-
from line has been given gram.
A fault comes up and the drive shuts down, if the
command Motor start is given and the bypass
circuit breaker is closed
- Parameter setting for breaker opening time
not appropriate
- Sbp(i) tripped or in test position
- Malfunction of Sbp(i)
- Loose or disconnected wires control circuit
- Control cable shields not properly grounded
Sbp2Control See Sbp1Control See Sbp1Control x 2a
Related digital input: DI 6.6 on IOEC 6
Sbp3Control See Sbp1Control See Sbp1Control x 2a
Related digital input: DI 6.9 on IOEC 6
Sbp4Control See Sbp1Control See Sbp1Control x 2a
Related digital input: DI 6.12 on IOEC 6
Self Exci HW Self Excitation Hardware - Check the DC voltage, see parame- 3
Self excitation causes the voltage in the DC link ters P 02.02 to P 02.09
to rise. If the DC link voltage is above the limit - Check if mains supply voltage is with-
of 133% of the nominal voltage, the drive shuts in the permitted limits. See Appendix
down A - Technical Data
The hardware based protection function
monitors the positive and negative DC link
voltages
The OVVP board is used to detect the
overvoltage condition. The measured values
are transmitted via the INT board to the AMC3
board
Self Exci SW Self Excitation Software - Check the DC voltage, see parame- 3
Self excitation causes the voltage in the DC link ters P 02.02 to P 02.09
to rise. If the DC link voltage is above the limit - Check if mains supply voltage is with-
of 133% of the nominal voltage, the drive shuts in the permitted limits. See Appendix
down A - Technical Data
Overvoltage detection is based in software by
monitoring the positive and negative DC link
voltages. The ADCVI board measures the DC
link voltages. The measured values are
transmitted via the INT board to the AMC3
board
ACS 1000 User’s Manual, Rev. E 3BHS102768 10-31 (of 40)
Chapter 10 - Trouble Shooting and Repair
Table 10-1 Alarm and Fault Messages and Fault Rectification (Continued)
of Shut down
Alarm
Meaning of the Message
Type
Message Test and Rectification
- Possible Causes
Short Circuit A short circuit in the input rectifier bridge, DC - Check fault history buffer for 3
link or inverter is present, if an undervoltage other, related error messages
alarm and fault occur within 200 µs If only a "ShortCircuit" fault message
Short circuit protection is based on monitoring is recorded in the fault logger, the rec-
the DC link voltage tifier, most probably the rectifier bridge
diode(s) has (have) a short. Check
- Short-circuit the rectifier components
If other faults are recorded at the
same time, the short circuit is either in
the DC link or the inverter
Short Cir Mi Short Circuit Minus 3
Inverter short circuit protection
Short circuit protection in the DC link plus and
minus circuit is established by monitoring the
voltage across a di/dt choke by means of the
VLSCD board. If the measured voltage is
higher than a set limit value, the board sends a
light pulse via a fiber optic to the INT board. If
the transmit time of the light signal exceeds a
programmed time, a short circuit condition is
detected by the INT board. Each time an IGCT
is turned on, the VLSCD board should send a
short light pulse. If the INT board does not
receive the light pulse, a short circuit condition
is present.
The "Short Cir Mi" fault is in the DC link minus
circuit
- Defective IGCT. If a "ShortCirMi" fault occurs
with an "Undevoltage" fault, one of the IGCTs
in the minus part of the inverter can have a
short
- Defective VLSCD 2 board
- Defective INT board
10-32 (of 40) 3BHS102768 ACS 1000 User’s Manual, Rev. E
Chapter 10 - Trouble Shooting and Repair
Table 10-1 Alarm and Fault Messages and Fault Rectification (Continued)
of Shut down
Alarm
Meaning of the Message
Type
Message Test and Rectification
- Possible Causes
Short Cir PL Short Circuit Plus 3
Inverter short circuit protection
Short circuit protection in the DC link plus and
minus circuit is established by monitoring the
voltage across a di/dt choke by means of the
VLSCD board. If the measured voltage is
higher than a set limit value, the board sends a
light pulse via a fiber optic to the INT board. If
the transmit time of the light signal exceeds a
programmed time, a short circuit condition is
detected by the INT board. Each time an IGCT
is turned on, the VLSCD board should send a
short light pulse. If the INT board does not
receive the light pulse, a short circuit condition
is present
The "Short Cir Pl" fault is in the DC link plus
circuit
- Defective IGCT. If a "ShortCirMl" occurs with
an "Undevoltage" fault, one of the IGCTs in
the plus part of the inverter can have a short
- Defective VLSCD 2 board
- Defective INT board
Sine Filt Cap Short circuit in sine filter capacitor. - The type of capacitors used for AC fil- 1b
- The sine filter capacitor is shorted. tering is non-self healing. Replace the
faulty capacitor.
SM1 Control Message relates to the synchronized bypass. - Check parameter settings in parame- 2b
ACS 1000 is unable to operate the motor circuit ter group 65
breaker - Check motor circuit breaker functions
according to userís manual and circuit
- Wrong parameter setting diagram
- Malfunction of motor circuit breaker - Check that wires between motor cir-
- Loose or disconnected wire(s) cuit breaker and ACS 1000 are prop-
erly connected
SM2 Control See SM1 Control See SM1 Control 2b
SM3 Control See SM1 Control See SM1 Control 2b
SM4 Control See SM1 Control See SM1 Control 2b
SM1 Disturb Circuit Breaker Disturbance - Check circuit breaker functions ac- 2b
Circuit breaker opens while drive is in operation cording to breaker userís manual and
circuit diagram
- Circuit breaker tripped or in test position
- Malfunction of breaker
- Loose or disconnected wire(s)
- Fibre-optic link from interface board to IOEC
5 interrupted
- Control cable shields not properly grounded
ACS 1000 User’s Manual, Rev. E 3BHS102768 10-33 (of 40)
Chapter 10 - Trouble Shooting and Repair
Table 10-1 Alarm and Fault Messages and Fault Rectification (Continued)
of Shut down
Alarm
Meaning of the Message
Type
Message Test and Rectification
- Possible Causes
SM2 Disturb See SM1 Disturb See SM1 Disturb 2b
SM3 Disturb See SM1 Disturb See SM1 Disturb 2b
SM4 Disturb See SM1 Disturb See SM1 Disturb 2b
SM1 Not Avl SM1 not available - Check circuit breaker position and op- x
erating mode
- Breaker defective, drawn out, in îlocalî mode, - Check if parameter settings corre-
in test position etc. spond to the circuit breaker : see pa-
- Wrong parameter settings rameter group 65
- Check circuit breaker functions ac-
cording to circuit breaker userís man-
ual and circuit diagram
SM2 Not Avl See SM1 Not Avl See SM1 Not Avl x
SM3 Not Avl See SM1 Not Avl See SM1 Not Avl x
SM4 Not Avl See SM1 Not Avl See SM1 Not Avl x
Supp Phase L Supply Phase Loss - Check that transformer secondary 1b
Protection function based on monitoring the winding is not grounded
voltage ripple in the DC link - Check the supply circuit . If the Main
Circuit Breaker is equipped with fus-
- Transformer es, check that the fuses are OK.
- Loss of a phase or voltage unbalance Check that cable connections are tight
- Defective rectifier diods
Swfreq HW Switching Frequency Hardware - Do not try to restart the ACS1000. In- 2a
Switching frequency exceeds permitted limit correct control SW may cause serious
The switching frequency is controlled and damage to the ACS1000
monitored in the software. A hardware based Always contact the ABB service orga-
protection function in the EPLD logic prevents nization
the switching frequency from increasing too
high, if the control software fails
- Error in control software of EPLD
Swfreq SW Switching Frequency Software - Do not try to restart the ACS1000. In- 2a
Switching frequency too high correct control SW may cause serious
damage to the ACS1000
- Wrong system parameters Always contact the ABB service orga-
- Defective INT board nization
- Defective AMC board
- Defective ADCVI board
- Defective SVA subboard
- Defective SCA subboard
- Defective current transducer
Synchrotact Malfunction of synchronizing device - Check synchrotact fault display. Refer x
Message relates to synchronized bypass to synchrotact manual
10-34 (of 40) 3BHS102768 ACS 1000 User’s Manual, Rev. E
Chapter 10 - Trouble Shooting and Repair
Table 10-1 Alarm and Fault Messages and Fault Rectification (Continued)
of Shut down
Alarm
Meaning of the Message
Type
Message Test and Rectification
- Possible Causes
Tacho Comm Tacho Communication - Check the dip switch settings of the x 1a
The communication between pulse encoder, pulse encoder module according to
encoder module (NTAC-02) and AMC3 board the manual. Measure tacho pulses.
(channel 5) is lost Replace the pulse encoder if neces-
Related parameter: sary
P 50.05 ENCODER ALM/FLT selects the alarm - Check 24 VDC power supply of pulse
or fault encoder module and AMC3 board
Check that connections are tight.
- Pulse encoder - Check and verify the following param-
- Pulse encoder not compatible with pulse en- eters:
coder type P 50.02 SPEED MEAS MODE
- Disconnected power supply P 50.04 ENCODER PULSE NR
- Wrong parameter settings P 75.03 ENCODER MODULE
- Optic link - Check that the connections of the fi-
- Defective AMC board ber optic cables in the communication
link between AMC3 board and pulse
encoder module are tight
Tacho Meas Tacho Measurement - Check that all wires between pulse x 1a
Difference between measured speed and encoder and encoder module (NTAC-
estimated speed too big 02)are connected in the right way.
Related parameter: Check that the shields of the signal
P 50.05 ENCODER ALM/FLT selects the alarm wires are grounded properly. Check
or fault encoder signal for interferences.
- Check that the pulse encoder is prop-
- Loose, disconnected or mixed up wires erly coupled to the motor
- Pulse encoder coupling - Check that the parameter settings
- Wrong parameter settings correspond to the pulse encoder in
- Non-compatible pulse encoder use
- Check that pulse encoder is compati-
ble with pulse encoder module
ACS 1000 User’s Manual, Rev. E 3BHS102768 10-35 (of 40)
Chapter 10 - Trouble Shooting and Repair
Table 10-1 Alarm and Fault Messages and Fault Rectification (Continued)
of Shut down
Alarm
Meaning of the Message
Type
Message Test and Rectification
- Possible Causes
TrafoTemp Transformer Temperature - Check transformer load and ambient x 1b
Transformer winding temperature or oil temperature and compare with rated
temperature too high. The message either values
represents an alarm or a fault, depending on - Check if installation conditions are
the digital inputs used and on the parameter satisfactory (exposure to sun, obsta-
settings for the analog input. All inputs are cles in air flow etc.)
located on IOEC 3: - Check transformer cooling equipment
DI 2 TRAFO TEMP ALARM - Check wiring of monitoring circuit
DI 3 TRAFO TEMP TRIP - Check that control cable shields are
AI 1 TRAFO TEMP properly grounded
Related parameters:
P 36.01 TRAFO TEMP PROTECTION DI
enables DI 2 and DI 3
P 36.02 TRAFO TEMP PROTECTION AI
determines if an alarm or a fault is generated
- Transformer load too high
- Ambient temperature too high
- Transformer cooling insuficient
- Loose or disconnected wire(s) in protecting
circuit
- Control cable shields not properly grounded
TrafTempMLos Transformer Temperature Measurement Loss - Check signal level at AI 1 on IOEC3 x S
No signal at AI 1 on IOEC 3 TRAFO TEMP (signal must be > 2mA)
Related parameters: - Check power supply of monitoring de-
P 81.04 MINIMUM AI1 activates the monitoring vice
function, if set to 2 (2 = 4mA/2V) - Check wiring between external tem-
P 36.02 TRAFO TEMP PROTECTION AI perature measuring device and
determines if an alarm or a fault is generated ACS 1000
- Check wiring of monitoring device in-
- Signal below pre-set minimum level puts
- Loose or disconnected wire(s) - Check that control cable shields are
- Control cable shields not properly grounded properly grounded
TrippingLoop A contact from one or more protecting devices - Check which external protecting de- 2b
connected to the tripping loop (terminal strip vice initiated the trip
X300) is open. Each contact is monitored via a - Check that the tripping loop is wired
digital input. The message TrippingLoop relates according to the wiring diagrams
to DI 4 on IOEC 1
- Open contact in tripping loop
- Tripping loop not wired up properly
10-36 (of 40) 3BHS102768 ACS 1000 User’s Manual, Rev. E
Chapter 10 - Trouble Shooting and Repair
Table 10-1 Alarm and Fault Messages and Fault Rectification (Continued)
of Shut down
Alarm
Meaning of the Message
Type
Message Test and Rectification
- Possible Causes
TrOilLevel Transformer Oil Level low - Check oil level x
Message is related to DI 1 on IOEC 3 - Check oil seals, cooler and tank for
Related parameter: damages
P 36.06 TRAFO OIL LEVEL PROTECTION - Check wiring of monitoring circuit
enables DI 1 - Check that control cable shields are
properly grounded
- Low oil level
- Oil leakage
- Loose or disconnected wire(s) in protecting
circuit
- Control cable shields not properly grounded
Underload Software based protective function - Verify underload curve parameters x 1b
Motor torque stays below a selected underload - Check that normal load is not too low
curve longer than a specified time - Verify that driven equipment is work-
Related parameters: ing properly
P 30.16 UNDERLOAD FUNC enables the - Check that motor and converter rat-
function and determines the reaction on an ings match for the whole speed range.
underload condition
P 30.17 UNDERLOAD TIME sets the time for
the underload function to become active
P 30.18 UNDERLOAD CURVE selects one of
five curves
- Underload curve parameters are not set cor-
rectly
- Motor load is too low for motor and converter
ratings
- Motor and converter ratings do not match
Undervoltage Temporary undervoltage in the DC circuit - Check that the mains voltage is within x 2b
The protective function is used to monitor the +/-10% of the nominal voltage. See
mains voltage parameters:
If the DC voltage decreases below 71 % of the P 02.03 DC VOLTAGE Udc1
nominal voltage an alarm is generated (only if P 02.05 DC VOLTAGE Udc2
the Ride Through function is not activated) P 02.06 DC VOLTAGE Udc1 + Udc2
If the DC voltage decreases below 65 % a trip - Check if alarm is caused by an exter-
is initiated nal event (e.g. temporary loss of sup-
ply voltage)
- Supply voltage low - Check fault history buffer for other,
- Defective ADCVI board possibly related error messages
- Defective SVA subboard
- Defective INT board
WrgMtrSel Wrong Motor Selected - Check MOTOR SELECT inputs x
Alarm message relates to the synchronized - Check wiring to MOTOR SELECT in-
bypass function for 4 motors puts
- Wrong motor selected
- Wiring is mixed up, loose or disconnected
ACS 1000 User’s Manual, Rev. E 3BHS102768 10-37 (of 40)
Chapter 10 - Trouble Shooting and Repair
Table 10-1 Alarm and Fault Messages and Fault Rectification (Continued)
of Shut down
Alarm
Meaning of the Message
Type
Message Test and Rectification
- Possible Causes
Wrong EPLD EPLD is not compatible with the SW version Call ABB service 1b
- The EPLD software version on the INT board
is not compatible with the AMC3 software ver-
sion
WrongMF-Sig Wrong Master Follower Signal - Check parameter settings of x
Software based protective function P 70.09 CH2 MASTER SIGNAL 1
Wrong signal for master follower control. The P 70.10 CH2 MASTER SIGNAL 2
function is active if P 70.08 CH2 M/F MODE is P 70.11 CH2 MASTER SIGNAL 3
set to MASTER
- Wrong parameter settings
WtrConduct Water Conductivity - Check piping for fouling x 1b
The cooling water conductivity is above alarm - Check that all valves are in correct po-
level (0.5 µS) or trip level (0.7 µS) sition
The cooling water conductivity is monitored via - Replace ion exchange vessel (see
AI 4 on IOEC 1. The actual value can be Chapter 9 - Preventive Maintenance,
viewed in P 04.04 INV WATER Maintaining the Water Cooling Sys-
CONDUCTIVITY tem, page 9-7)
- Poor cooling water quality
- Exhausted ion exchange resin
- Defective conductivity sensor
WtrCondMLos Water Conductivity Measurement Loss - Check signal level at AI 4 on IOEC1 S
No signal at AI 4 INV WTR CONDUCTIVITY on (signal must be > 2mA)
IOEC 1 - Check power supply (24 V DC) of sen-
sor
- Signal below pre-set minimum level - Check that wires are properly con-
- Loose or disconnected wire(s) nected
- Control cable shields not properly grounded - Check that control cable shields are
properly grounded
WtrLevelLow Water Level Low - Check cooling water level. See Chap- 1b
Water level in expansion tank is low ter 9 - Preventive Maintenance, Add-
The water level is monitored by a level switch ing Water to the Cooling System,
connected to DI 9 on IOEC 1 page 9-13 for topping up the cooling
system
- Leakage in cooling water circuit - Check that all bleed/drain valves are
- Loose or disconnected wires in monitoring closed
circuit - Check complete cooling system for
- Control cable shields not properly grounded leaks
- Check wiring and shielding of measur-
ing circuit
10-38 (of 40) 3BHS102768 ACS 1000 User’s Manual, Rev. E
Chapter 10 - Trouble Shooting and Repair
Table 10-1 Alarm and Fault Messages and Fault Rectification (Continued)
of Shut down
Alarm
Meaning of the Message
Type
Message Test and Rectification
- Possible Causes
WtrPressure Water Pressure - Check water level in the expansion x 1b
The cooling water pressure is monitored via vessel
AI 3 on IOEC 1. The actual pressure value can - Check that all bleed/drain valves are
be seen in P 04.03 INV WATER PRESSURE. closed
If only one pump is present and the pressure - Check complete cooling system for
decreases below 1.5 bar the drive shuts down. leaks
If a second pump is installed and the pressure - Check wiring and shielding of measur-
decreases below 1.5 bar, an alarm comes up ing circuit
and the 2nd pump is switched on. If the
pressure does not increase above 1.5 bar after
a set time, the drive shuts down
WtrPresMLos Water Pressure Measurement Loss - Check signal level at AI 3 on IOEC1 S
No signal at AI 3 on IOEC 1 (signal must be > 2mA)
- Check power supply (24 V DC) of sen-
- Signal below pre-set minimum level sor
- Loose or disconnected wire(s) - Check that wires are properly con-
- Control cable shields not properly grounded nected
- Check that cable shields are properly
grounded
WtrTemp Water Temperature - Check temperature and pressure in x 1a
The cooling water temperature is monitored via the raw water circuit
AI 2 on IOEC 1. The actual temperature value - Check level and pressure in the main
can be seen in P 04.03 INV WATER cooling circuit
TEMPERATURE. If the temperature encreases - Check proper functioning of motor
above 39 °C an alarm comes up. If the valve
temperature encreases above 41 °C the drive - Check heat exchanger
shuts down - Check measuring circuit
- Not sufficient cooling water
- Defective motor valve in raw water circuit
- Clogged up heat exchanger
- Malfunction of measuring circuit
WtrTempMLos Water Temperature Measurement Loss - Check signal level at AI 2 on IOEC1 S
No signal at AI 2 on IOEC 1 (signal must be > 2mA)
- Check power supply (24 V DC) of sen-
- Signal below pre-set minimum level sor
- Loose or disconnected wire(s) - Check that wires are properly con-
- Shielding of control cables not properly nected
grounded - Check that cable shields are properly
grounded
ACS 1000 User’s Manual, Rev. E 3BHS102768 10-39 (of 40)
Chapter 10 - Trouble Shooting and Repair
10-40 (of 40) 3BHS102768 ACS 1000 User’s Manual, Rev. E
Chapter 11 - Transportation, Storage, Disposal and
Recycling
11.1 Introduction
This chapter provides all necessary information about proper transporta-
tion and storage of the ACS 1000, the spare parts and the disposal and
recycling of materials.
ABB has determined basic requirements for transportation and storage to
maintain the reliability of the converter. Environmental requirements for
transportation and storage are included in this chapter and must be
observed.
For information about ambient conditions during transportation and
storage refer also to Appendix A - Technical Data.
11.2 Transportation Conditions
The transportation conditions are based on IEC 721-3-1 ‘Classification of
environmental conditions’.
Environmental classes: 2K3/2B1/2M1
11.3 Packing
The converter is protected against external influences caused by either
sea, air or road transportation. Two types of packings are available:
• Domestic packing (consisting of a wooden pallet and a plastic foil)
protects the ACS 1000 against water and dust.
• Export packing (consisting of a wooden pallet, plastic foil, desiccant a
wooden case with a wall thickness of 24 mm) for sea and air trans-
portation protects the converter additionally against mechanical forc-
es and extreme climatic conditions.
The packing is labeled with all relevant warnings and instructions for pack-
aging, handling and storage.
ACS 1000 User’s Manual, Rev. E 3BHS102768 11-1 (of 10)
Chapter 11 - Transportation, Storage, Disposal and Recycling
Table 11-1 Packing, Handling and Storage Instructions
Label Meaning Application
A This way up Marked on all cases and
open shipped
components.
B Fragile - handle Marked on cases
with care containing fragile or
sensitive to shock
material.
C Keep dry Marked on cases,
plywood cases and
cartons that are to be
kept dry. Do not put on
crates or cases meant for
long term storage
outdoors.
D Center of gravity Marked on cases and
components that are
shipped unprotected
(open) and require the
indication of the center of
gravity.
E Sling here Marked on all cases and
open components where
ropes and chains are
slung.
F Packing with On all cases requiring the
desiccant application of a
desiccant. Symbol
DESICCANT preferably above the
swivel cover of the
inspection hole.
Color of the label is
black.
11-2 (of 10) 3BHS102768 ACS 1000 User’s Manual, Rev. E
Chapter 11 - Transportation, Storage, Disposal and Recycling
Note: The conservation measures taken for the transport packing are only
useful as long as the packing is kept unopened and in its original condition.
11.4 Loading and Unloading
For loading and unloading the converter with the help of a hoisting device,
the following points have to be observed:
Caution: Drive components can be damaged during transportation.
! The converter must be transported in upright position.
Use the lifting lugs on the top of the converter if moved by crane.
• The lifting eyes may only be removed after the converter has been in-
stalled at its final position. They have to be remounted if the converter
has to be transported again.
• The material and diameter of the transport rope or chain have to cor-
respond to the weight of the converter unit.
Lifting Angle The minimum lifting angle between the rope or chain and the converter
unit is 45° (see Figure 11-1).
Caution: The fan cover must not be mounted while lifting the converter
! unit.
45° 45°
Figure 11-1 Lifting Angle
ACS 1000 User’s Manual, Rev. E 3BHS102768 11-3 (of 10)
Chapter 11 - Transportation, Storage, Disposal and Recycling
Center of Gravity
x
Front View
Top View
Converter Type: W1 W2 W3
x 2046 mm 2300 mm 2300 mm
y 896 mm 890 mm 890 mm
z 477 mm 480 mm 480 mm
Figure 11-2 Center of Gravity (Approximate Values)
11.5 Unpacking
When unpacking the converter proceed according to the following steps:
1 Check the packing condition. Pay attention to damages by mechan-
ical forces, water, humidity, heat or fire.
2 In case the packing has been damaged, proceed as described in
section Transportation Damages, page 11-6.
3 Remove all packing material carefully (see Figure 11-3).
1 Remove the top of the box
2 Remove the end and the side walls
3 Take off the bottom of the box
11-4 (of 10) 3BHS102768 ACS 1000 User’s Manual, Rev. E
Chapter 11 - Transportation, Storage, Disposal and Recycling
Top of the box End wall
1000
ACS
End wall Bottom of the box Side wall
Figure 11-3 Unpacking the Converter
4 Check the condition of the converter unit. Pay especially attention to:
• Bent doors and side walls
• Loose electric cables
• Unassembled parts
• Damaged parts
• Dust layers
• Water or humidity (indicator color on side of the box
must be blue; if the color is red, the converter has
been exposed to excessive humidity)
• Damages by insects or vermin.
5 Compare the complete delivery with your order. In case any parts are
missing, contact immediately your local ABB service organization
and/or the shipping company.
ACS 1000 User’s Manual, Rev. E 3BHS102768 11-5 (of 10)
Chapter 11 - Transportation, Storage, Disposal and Recycling
11.5.1 Transportation Damages
In case of transportation damages proceed as follows:
1 Take photos of the damage(s).
2 Return the Transportation Damage Description Form for the ACS
1000 (included at the end of this chapter) together with the photos to
the shipping company and a copy to
ABB Switzerland Ltd
Medium Voltage Drives
Mr. Rainer Hosp
CH-5300 Turgi
Switzerland
E-Mail: rainer.hosp@ch.abb.com
Fax: +41 58 589 29 84
11.6 Storage
11.6.1 Storage Conditions
The minimum requirements for storage are based on IEC 721-3-1 ‘Classi-
fication of environmental conditions’.
Environmental classes: 1K4/1Z5/1B1/1M1
Note: The converter can be stored for up to 1 year in the original packing
as long as it is not damaged or opened. For information on longer storage
periods contact the ABB service organization.
Note: The ACS 1000 is delivered with batteries. After 1 year, when the
converter is unpacked and ready for commissioning, the batteries must be
replaced.
Note: Pay attention to always fulfill the ambient conditions during the
storage period according to Appendix A - Technical Data.
Storage after Shutdown If the converter has to be stored after it has been unpacked or after it has
been in service, proceed as follows:
1 Drain the cooling circuit completely (contact your ABB representative)
or add the appropriate amount of glycol for frostproofing, if the drive
is to be stored in ambient temperatures below 0 °C (32 °F). See
Chapter 9 - Preventive Maintenance, Cooling Water with Anit-Freeze,
page 9-9.
11-6 (of 10) 3BHS102768 ACS 1000 User’s Manual, Rev. E
Chapter 11 - Transportation, Storage, Disposal and Recycling
2 Remove the batteries.
For correct storage of the batteries refer to Appendix L - Subsupplier
Data.
3 Place the converter on a wooden frame or pallet.
4 Cover all cable inlets and ventilation slots with an impermeable plastic
or aluminum foil and a wooden panel. (The foil must be placed
between the slots and the wooden cover).
5 Add the desiccant of the appropriate quality: 1 unit desiccant (30g)
absorbs 6g water vapor. According to the used packing material you
need the following quantity:
• PE sheet: 10 units/sqm foil
• Aluminum foil: 8 units/sqm foil.
6 Close and lock the doors of the converter unit.
7 Use the below listed polyethylene sheet or combined aluminum foil as
protective packing and as a protection against moisture:
• PE sheet: 0,3g/sqm/24h water vapor diffusion
• Aluminum foil: 0,01g/sqm/24h water vapor diffusion.
8 Attach humidity indicators (e.g. mechanical hygrometers) on the
protective foil. Place them for example on the front door of the
converter.
Note: ABB recommends to check the packing condition regularly.
11.7 Storage Instructions for Spare Parts
Inspect the spare parts immediately after receipt for possible transporta-
tion damages and report any damage to the forwarder and insurance
company.
11.7.1 Ambient Conditions
In order to maintain the converter spare parts in good condition after the
delivery and to keep the warranty valid during the warranty period the
following must be taken care of:
• Keep the spare parts in their original packing
• Electronic boards have to be stored in antistatic bags or boxes
• Storage temperature range: -5 °C to + 55 °C (23 °F to 131 °F)
ACS 1000 User’s Manual, Rev. E 3BHS102768 11-7 (of 10)
Chapter 11 - Transportation, Storage, Disposal and Recycling
• The storage place must be:
• Free of vibration and shock
• Protected against dust and sand
• Protected against vermin and insects
• Free of corrosive gases, salt or other impurities that
could damage electronic equipment and boards
• Dry; no condensation
Relative air humidity: 5 to 85 %
If in doubt whether the maximum allowed humidity is
exceeded, protect the spares by an external heater.
Note: For correct storage of batteries please refer to Appendix L - Subsup-
plier Data.
Should you have further questions, consult the commercial terms in the
purchasing agreement, your local ABB representative or the manufac-
turer:
ABB Switzerland Ltd,
Medium Voltage Drives
Mr. Rainer Hosp
CH-5300 Turgi
Switzerland
E-Mail: rainer.hosp@ch.abb.com
Fax: +41 58 589 29 84
Tel: +41 58 589 22 33
11.8 Handling Instructions for Printed Circuit Boards
Caution: Do not touch printed circuit boards or other sensitive compo-
! nents without applying static-sensitive handling precautions!
Static electricity can damage boards and components!
• Do not touch the components without wearing a wrist grounding
strap.
• Put the board or component on a grounded working surface protected
against electrostatic discharges.
• Hold a board only at the edge.
• Handle a faulty board as carefully as a new one.
11-8 (of 10) 3BHS102768 ACS 1000 User’s Manual, Rev. E
Chapter 11 - Transportation, Storage, Disposal and Recycling
11.9 Disposal of Packing Material
The packing material is environment-friendly and parts of it can be re-
used. Dispose of the packing material according to local regulations.
Packing material:
• Wooden frame
• Wooden pallet
• Polyethylene sheet
• Plywood
• Silicagel.
11.10 Disassembly and Disposal of Equipment
De-energize and ground the drive according to Chapter 8 - Operation, De-
energizing the ACS 1000, page 8-8, before starting to disassemble the
unit.
Dispose of the following components according to local regulations:
• Battery
• Capacitors
• Printed circuit boards
• Electronic components.
ACS 1000 User’s Manual, Rev. E 3BHS102768 11-9 (of 10)
Chapter 11 - Transportation, Storage, Disposal and Recycling
11-10 (of 10) 3BHS102768 ACS 1000 User’s Manual, Rev. E
Transportation Damage Description Form
ACS 1000
Company / Address: .....................................................................................................
Customer’s Address: .....................................................................................................
Reporting person (Name / Phone / Fax): .......................................................................
.......................................................................................................................................
Type of ACS 1000: .........................................................................................................
ABB FAUF-No. / Serial No. (see nameplate):.................................................................
.......................................................................................................................................
Scene of damage: ..........................................................................................................
Date of damage: ............. and/or realized ............. Status of shock indicator:.............
Visible packing damages:...............................................................................................
Brief description of damage at the equipment:
.......................................................................................................................................
.......................................................................................................................................
.......................................................................................................................................
.......................................................................................................................................
.......................................................................................................................................
.......................................................................................................................................
.......................................................................................................................................
.......................................................................................................................................
Date: ................................ Customer’s Signature: ................................................
Date: ................................ Transport Company’s Signature: .................................
Please return this form to: ABB Switzerland Ltd
Medium Voltage Drives
Mr. Rainer Hosp
CH-5300 Turgi
Switzerland
E-Mail: rainer.hosp@ch.abb.com
Fax: +41 58 589 22 84
ACS 1000 User’s Manual 3BHS102768
ACS 1000 User’s Manual 3BHS102768
Index
Note that locator page numbers appear in Automatic Restart 3-13
regular type faces for standard index refer- Auxiliary Power Cable Connection 6-22 to 6-23
ences (e.g. 3-13). For index references that Auxiliary Power Cable. See Cable, Auxiliary
correspond to items found in figures and illus- Power
trations, the locator page numbers are shown in Auxiliary Ride Through 3-12
bold type face (e.g. 6-16).
B
A
Base Dimensions. See Installation, Base
Acceptance 7-4 Dimensions
Accurate Speed Control. See Speed, Accurate Battery
Speed Control Replacement 9-5 to 9-6
Accurate Torque Control. See Direct Torque Test 3-17
Control and Torque, Accurate Torque
Control
Active Fault Display 5-7
C
Actual Signal Display Mode. See Control Cabinet
Panel, Functions Design 3-4
Actual Signals Sections 3-5 to 3-7
Display 5-4 to 5-7 Cable
Monitoring 3-15 Auxiliary Power 6-13
Selection 5-6 Checking Connections 9-4
Air Cooling Circuit. See Cooling System Connections 6-14 to 6-15
Alarm Control 6-13
Handling 10-4 to 10-5 Dimensioning Power Cables 6-13
Messages 10-5 to 10-38 Entries. See Cable, Connections
Ambient Conditions. See Storage, Ambient Motor 6-12
Conditions Motor Connections 6-15
Analog Inputs 4-2 Power 6-13, 6-19
Number of 4-2 Routing 6-14
Scalable 3-15 Selection 6-11 to 6-13
Analog Outputs 4-2 Transformer 6-11
Number of 4-2 Transformer Connections 6-14
Programmable 3-14 Cable Ducts 6-3
Angle Brackets 6-7 CDP 312. See Control Panel
Anti-Freeze Charging Fault 3-17
Cooling Water, with 9-9 Checking
Values 9-9 Water Conductivity 9-23
Application Macros 4-10 to 4-34 Water Level 9-24
Factory 4-11 to 4-14 Water Pressure 9-24
Hand/Auto 4-15 to 4-18 Cleaning 9-4
Master/Follower 4-29 to 4-33 Clearances 6-2, 6-16
PID 4-19 to 4-22 Commissioning Procedure 7-4
Selection of 5-14 to 5-17 Common Mode Choke 3-2
Sequential 4-26 to 4-28 Common Mode Damping Resistor 3-2
Torque 4-23 to 4-25 Communication Fault 3-17
User 4-34, 5-17 to 5-19
ACS 1000 User’s Manual, Rev. E 3BHS102768 Index-1 (of 6)
Control Dimensioning Power Cables. See Cable,
External Control Stations 3-14 Dimensioning Power Cables
Functions 3-11 to 3-16 Direct Torque Control (DTC) 3-3 to 3-4
Local and Remote 3-14, 5-11 to 5-12 Block Diagram 3-4
Locations 3-10, 3-14, 5-11 Disassembly 11-9
Main Circuit Breaker (MCB) 3-14 Disposal
Section. See Cabinet, Sections Equipment, of 11-9
System. See Direct Torque Control Packing Material, of 11-9
Voltage 4-3 Door Locks 3-8, 6-6 to 6-7
Control Cable Connection 6-23 to 6-26 Drinking Water Specification. See Cooling
Control Cables. See Cable, Control Water, Specification
Control Equipment 3-3, 3-10 DriveSupport. See PC Tools
See also Control Panel DriveWindow. See PC Tools
Control Panel 3-10, 5-1 to 5-14
Actual Signal Display Mode 5-4 to 5-7
Funtions 5-2 to 5-14
E
Setting the Contrast 5-10 Elementary Diagram 3-1
Converter 3-1 to 3-3 EMC (Electro Magnetic Compatibility) Sleeve
Input Circuit 3-1 6-20
Output Circuit 3-2 Emergency Off. See Emergency Stop
Converter Section. See Cabinet, Sections Emergency Stop 3-16, 8-9 to 8-10
Cooling Circuit 3-17 Environmental Conditions. See Storage,
See also Cooling System and Water Ambient Conditions
Cooling System Equipment Grounding 6-13
Cooling Pump External Control Stations 3-14
Removing and Installing 9-17 to 9-23
Cooling Section. See Cabinet, Sections
Cooling System 3-8 to 3-10 F
See also Water Cooling System
Factory Macro. See Application Macros,
Cooling Water
Factory
Conductivity 9-23
Fault
Level 9-24
Elimination. See Fault, Rectification
Pressure 9-24
Handling 10-4 to 10-5
Specification 9-8
Messages 10-5 to 10-38
with Anti-Freeze 9-9
Rectification 10-5 to 10-38
Creepage Distance 6-16
Fault History 3-16
Critical Speed. See Speed, Critical Speed
Display 5-4, 5-7
Resetting 5-7
D Filling the System. See Water Cooling System,
Filling
DC Components Section. See Cabinet, Filter Section. See Cabinet, Sections
Sections Filter, LC Sine 3-2
DC Link, Charging 8-5 Floor
De-energizing the ACS 1000 8-8 to 8-9 Fixings 6-3
Digital Inputs 4-2 Levelling 6-3
Number of 4-2 Flux Optimization 3-13
Digital Outputs 4-2 Flying Start 3-13
Number of 4-2 Function Mode. See Control Panel, Functions
Programmable 3-14 Functional Description 3-1 to 3-4
Index-2 (of 6) 3BHS102768 ACS 1000 User’s Manual, Rev. E
G Intended Audience. See Safety, Intended
Audience
Ground Fault 3-17 Intermediate DC Link Voltage. See Charging
Grounding Fault
Connections 6-20 Inverter 3-2
Isolator 8-3, 8-8, 8-9 Short Circuit in 3-19
See also Equipment Grounding Temperature 3-18
IOEC. See I/O Boards
H Ion Exchange Vessel
Changing 9-13
Hand/Auto Macro. See Application Macros, Disposal of 9-15
Hand/Auto Mounting 9-15
Center of Gravity 11-4 Removing 9-14, 9-17
Humidity. See Unpacking
L
I
Labels. See Safety, Labels
I/O Boards 4-2 to 4-10 Lifting
Location of IOEC Boards 4-4 Angle 11-3
Selection of IOEC 3 and IOEC 4 5-19 to 5- Lugs 11-3
20 Limit Values, Monitoring of 3-16
I/O Ratings 4-2 Line Unbalance Protection 3-16
I/O Signals 4-5 to 4-10 Local Control. See Control, Local and Remote
Main Circuit Breaker 4-6
Motor 4-7 M
Others 4-9
Process 4-9 Macros. See Application Macros
Remote Control Interface 4-5 Main Circuit Breaker (MCB)
Transformer 4-7 Closing 8-4
ID Number. See Start-up Parameters Control 3-14
Identification (ID) Run 5-8, 5-17 Mains Connection Scheme 7-3
Fault 3-18 Maintenance 9-1 to 9-24
Identification Mode. See Control Panel, Checking Connections 9-4
Functions Schedule 9-3 to 9-4
IGCT (Integrated Gate Commutated Thyristor) Specific Tasks 9-4 to 9-24
3-2 Master/Follower Macro. See Application
Input Circuit. See Converter, Input Circuit Macros, Master/Follower
Installation 6-1 to 6-26 Measurement Loss 3-18
Base Dimensions and Clearances 6-2 Mechanical Door Interlock. See Door Locks
Cabinet Mounting 6-7 Micro-Filter Replacement 9-15
Electrical 6-11 to 6-26 Monitoring Equipment. See Control, Equipment
Floor Fixings 6-3 Monitoring Functions. See Control, Functions
Floor Levelling 6-3 Motor
Mechanical 6-2 to 6-11 Cable Entry 6-15 to 6-17
Preparing Installation Site 6-5 Connections. See Cable, Connections
Raw Cooling Water Connection 6-9 Control Features 3-11 to 3-13
Raw Water, Circuit 6-4 Control. See Direct Torque Control
Site Requirements 6-2 to 6-3 ID Calculation 3-13
Transportation to Installation Site 6-6 Nominal Data. See Start-up Parameters
Insulation Checks 6-20 Overload 3-18
ACS 1000 User’s Manual, Rev. E 3BHS102768 Index-3 (of 6)
Parameters 5-8 Q
See also Appendix H - Signal and
Parameter Table Qualification, Required 1-1
Phase Loss 3-18
Protection 3-16 R
Stall 3-16
Winding Temperature 3-16 Ramp Functions 3-11
Raw Cooling Water Connection 6-9
O Raw Water
Circuit 6-4
Operational Functions. See Control Panel, See also Water Cooling System
Functions Interface 6-4
Output Circuit. See Converter, Output Circuit Specification 6-4
Overcurrent 3-18 Raw Water Inlet
Overload. See Motor, Overload from Bottom 6-6
Overspeed 3-17 from Side 6-5
Overvoltage 3-18 from Top 6-5
Rectifier Bridge. See Short Circuit in Rectifier
Bridge
P Reference Signal Processing 3-15
Packing 11-1 to 11-3 Reference Value 5-12
Parameter Remote Control. See Control, Local and
Lock 3-14, 5-20 Remote
Restoring Default Settings 5-21 to 5-22
Safety 5-1 S
Selection 5-8
Settings 5-14 to 5-22 Safety 1-1 to 1-6
Parameter Mode. See Control Panel, Concept 1-3
Functions Installation 6-1
PC Tools 3-19 Intended Audience 1-1
Phase Loss. See Supply Phase Loss Labels 1-2
PID Maintenance 9-2
Controller 3-14 Operation 8-1
Macro. See Application Macros, PID Regulations 1-4
Power Cable Entry 6-19 Required Qualification 1-1
Power Cables. See Cable, Power Residual Danger Areas 1-4
Power Circuit Interface. See Converter Responsibilities 1-2
Power Loss Ride-Through 3-13 Trouble Shooting 10-1
Power Terminal Section. See Cabinet, Sense of Rotation 5-13, 8-6
Sections Sequential Macro. See Application Macros,
Preparing Installation Site 6-5 Sequential
Process Stop 3-17 Service
Protection Address 9-1
Equipment 7-2 to 7-4 Training 9-1
Scheme 7-4 Setpoint Setting 5-13, 8-5 to 8-6
Protection Functions 3-16 to 3-19 Short Circuit in Rectifier Bridge 3-19
Pre-programmed 3-17 to 3-19 Shut-down, Types of 10-5
Programmable 3-16 to 3-17 Signals. See I/O Signals
Index-4 (of 6) 3BHS102768 ACS 1000 User’s Manual, Rev. E
Spare Parts Transportation 11-1 to 11-9
Handling Instructions 11-8 Center of Gravity 11-4
Storage Instructions 11-7 to 11-8 Damages 11-6
Speed Lifting Angle 11-3
Accurate Speed Control 3-11 Loading 11-3 to 11-4
Constant Speeds 3-12 to Installation Site 6-6
Critical Speed 3-12 Unloading 11-3 to 11-4
Macro. See Application Macros, Speed Unpacking 11-4 to 11-6
Speed Controller Tuning 3-13 Trouble-Shooting, Standard Procedure 10-3
Start Operation 8-2 to 8-5
Checks before 8-2 to 8-3
Starting the ACS 1000. See Start Operation
U
Start-up Parameters 5-8 Underload 3-17
Stopping Procedure 8-7 Undervoltage 3-17
Storage Unpacking 11-4 to 11-6
Ambient Conditions 11-7 to 11-8 User Macro. See Application Macros, User
Conditions 11-6 to 11-7
Spare Parts 11-7 to 11-8
Strainer Cleaning 9-16 W
Supply Phase Loss 3-19
Warranty 7-4
Water Conductivity. See Cooling Water,
T Conductivity
Water Cooling Circuit. See Water Cooling
Tools. See PC Tools System
Torque Water Cooling Pump
Accurate Torque Control 3-12 Removing and Installing 9-17 to 9-23
Full Torque at Zero Speed 3-13 Water Cooling System 9-7 to 9-24
Macro. See Application Macros, Torque Adding Water 9-13
Transformer Draining 9-7 to 9-8
Cable Entry 6-15 to 6-17 Filling 9-8 to 9-12
Connections. See Cable, Connections Water Level. See Cooling Water, Level
Protection 3-16 Water Pressure. See Cooling Water, Pressure
Water Treatment Circuit. See Cooling System
ACS 1000 User’s Manual, Rev. E 3BHS102768 Index-5 (of 6)
Index-6 (of 6) 3BHS102768 ACS 1000 User’s Manual, Rev. E
You might also like
- JASD Series AC Servo Driver User ManualDocument58 pagesJASD Series AC Servo Driver User ManualPuruf PufNo ratings yet
- Notes On Power Generation Transmission and DistributionDocument1 pageNotes On Power Generation Transmission and DistributionVishnu Shanker100% (1)
- Amline Submerseble MotorDocument52 pagesAmline Submerseble MotorWogayehuGizaw100% (1)
- Miniature Circuit Breaker S 200 M UC For DC and AC ApplicationsDocument16 pagesMiniature Circuit Breaker S 200 M UC For DC and AC ApplicationsMohamed EldinNo ratings yet
- Cable and Circuit TypesDocument72 pagesCable and Circuit TypesChanel Maglinao100% (4)
- 3bhs215632 Rev B As BuiltDocument47 pages3bhs215632 Rev B As BuiltWilliam AriasNo ratings yet
- Extension Cord Safety Module 2Document94 pagesExtension Cord Safety Module 2chibssa alemayehuNo ratings yet
- IGCT Technology - A Quantum Leap For High-Power ConvertersDocument5 pagesIGCT Technology - A Quantum Leap For High-Power ConvertersSreenivas_Chim_9626No ratings yet
- ACS 1000WCU Manual 3BHS204366 E02 RevADocument28 pagesACS 1000WCU Manual 3BHS204366 E02 RevAMohideen Vps100% (1)
- Tabal of ContantDocument11 pagesTabal of ContantAlhussain EmbarkNo ratings yet
- ACS1000 Water-Cooled: User ManualDocument182 pagesACS1000 Water-Cooled: User Manualedisontriana100% (1)
- IEC Low-Voltage Induction Motors 400 V 50 HZ: Including EU Efficiency ClassificationsDocument16 pagesIEC Low-Voltage Induction Motors 400 V 50 HZ: Including EU Efficiency ClassificationshugocoimbraNo ratings yet
- Abb ZX1.2 Ca en PDFDocument78 pagesAbb ZX1.2 Ca en PDFMarco CornelioNo ratings yet
- techNOTE - Coding Principles of Beacons and Indicators PDFDocument1 pagetechNOTE - Coding Principles of Beacons and Indicators PDFŽarko MočnikNo ratings yet
- Industrial Ethernet Book Nº97 (11 - 2016)Document52 pagesIndustrial Ethernet Book Nº97 (11 - 2016)Jorge_Andril_5370100% (1)
- 998-21345771 Coordination of Current Ratings in Low-Voltage Assemblies With Those of The Electrical InstallationDocument21 pages998-21345771 Coordination of Current Ratings in Low-Voltage Assemblies With Those of The Electrical InstallationSundar SahooNo ratings yet
- Hardware Troubleshooting: Course T302Document19 pagesHardware Troubleshooting: Course T302Gajanan Chavhan100% (1)
- Elite 500: High-Precision, Multiple Communication, TFT DisplayDocument4 pagesElite 500: High-Precision, Multiple Communication, TFT DisplayTeguh WaluyoNo ratings yet
- 1 3BHS260164 - ACS 2000 Power Cable Specification - Rev.DDocument8 pages1 3BHS260164 - ACS 2000 Power Cable Specification - Rev.DNguyen HungNo ratings yet
- ACS600 MD Lifecycle Status Statement RevBDocument1 pageACS600 MD Lifecycle Status Statement RevBKichin_ANo ratings yet
- JVL The MAC Motor AC-Servo Motors With Integrated Driver MAC400 To MAC3000Document16 pagesJVL The MAC Motor AC-Servo Motors With Integrated Driver MAC400 To MAC3000Electromate100% (1)
- Regenerative Grid Simulator Model 61800 SeriesDocument8 pagesRegenerative Grid Simulator Model 61800 SeriesHarsha VardhanNo ratings yet
- MNS Installation & Maintenance Manual 1TGC902040B0201 Rev BDocument226 pagesMNS Installation & Maintenance Manual 1TGC902040B0201 Rev BkhalidNo ratings yet
- 9) Front End ProcessorDocument23 pages9) Front End Processorsahil4INDNo ratings yet
- Operating Instructions "Akkutec 2420" Nbpa/R 2420-L33G1: J. Schneider Elektrotechnik GMBHDocument10 pagesOperating Instructions "Akkutec 2420" Nbpa/R 2420-L33G1: J. Schneider Elektrotechnik GMBHkekoizaNo ratings yet
- Systemoverview 05 2017 enDocument492 pagesSystemoverview 05 2017 enkaniappan sakthivelNo ratings yet
- Schedule TrainningDocument43 pagesSchedule TrainningdarkbertNo ratings yet
- PME 2021 Design & QuoteDocument65 pagesPME 2021 Design & QuoteDennis ManNo ratings yet
- Hirschmann Industrial Ethernet Pocket GuideDocument68 pagesHirschmann Industrial Ethernet Pocket Guidesamwoo2009No ratings yet
- E300 Electronic OverloadDocument36 pagesE300 Electronic OverloadIsraelNo ratings yet
- 2012-04-17 Brochure EPLAN Electric P8 EnglishDocument8 pages2012-04-17 Brochure EPLAN Electric P8 EnglishhhhNo ratings yet
- Elemec3 Portal User ManualDocument37 pagesElemec3 Portal User ManualRifki FathurrahmanNo ratings yet
- Programming Real-Time Systems With C/C++ and POSIX: Michael González HarbourDocument9 pagesProgramming Real-Time Systems With C/C++ and POSIX: Michael González HarbourGaetan LNo ratings yet
- ES ACS880-34 HW C With Update NoticeDocument274 pagesES ACS880-34 HW C With Update Noticeafadsfd asfadfNo ratings yet
- OrderingDocument4 pagesOrderingSaran KuttyNo ratings yet
- 800xa Outline - Communications - AC 800M Communication InterfacesDocument6 pages800xa Outline - Communications - AC 800M Communication InterfacesKourosh52100% (1)
- Garrettcom User GuideDocument329 pagesGarrettcom User GuidenaceurmaNo ratings yet
- Auma Sa 07.2-Sa 16.2....Document56 pagesAuma Sa 07.2-Sa 16.2....Q Llanos HenryNo ratings yet
- Prok SCS Digital Earth Leakage RelaysDocument9 pagesProk SCS Digital Earth Leakage RelaysjigyeshNo ratings yet
- 9ARD171384-600 - en System 800xa 6.0 IEC 61850 Engineering WorkflowDocument300 pages9ARD171384-600 - en System 800xa 6.0 IEC 61850 Engineering Workflownormando pantoja queirozNo ratings yet
- 2-Cablare Senzori - Actuatoare Și ConectoriDocument766 pages2-Cablare Senzori - Actuatoare Și ConectoriSilvian IonescuNo ratings yet
- 8DJHDocument76 pages8DJHMahesh JadavNo ratings yet
- Applying Igcts: Application Note 5sya 2032-04Document23 pagesApplying Igcts: Application Note 5sya 2032-04Shaibal BarikNo ratings yet
- 3BSE078159 en E ABB Ability System 800xa 6.0.3.2 System Guide Summary PDFDocument76 pages3BSE078159 en E ABB Ability System 800xa 6.0.3.2 System Guide Summary PDFEdison Morales San Martin100% (1)
- Catalogo KAVSDocument10 pagesCatalogo KAVShudsonNo ratings yet
- 2019.1.3 ST-E Earthing Switch Catalogue EN PDFDocument10 pages2019.1.3 ST-E Earthing Switch Catalogue EN PDFJosimar Llerena PintoNo ratings yet
- Simovert Master DriveDocument30 pagesSimovert Master Drivedrmsola9803No ratings yet
- S&C Series 2000 Circuit-Switchers: Table IV-Recommended Inspection ProceduresDocument8 pagesS&C Series 2000 Circuit-Switchers: Table IV-Recommended Inspection ProceduresAllen Dick ScottNo ratings yet
- ACS1000 Product Brochure Low-Res RevIDocument28 pagesACS1000 Product Brochure Low-Res RevISergio Fuentealba FuenzalidaNo ratings yet
- Simotic Siemens MotorDocument2 pagesSimotic Siemens Motorqdod_waffiNo ratings yet
- Power Plus Cable Co LLC - Cable Manufacturing Company in UAEDocument17 pagesPower Plus Cable Co LLC - Cable Manufacturing Company in UAELIjo JosephNo ratings yet
- HVX SelectionListDocument40 pagesHVX SelectionListkenlavie2100% (1)
- Ingecon h2 Powerstation FSK E6000 E12000 enDocument4 pagesIngecon h2 Powerstation FSK E6000 E12000 enpabloNo ratings yet
- Installation: Order No.: Customer: Equipment: Converter Type: Document: 3BHS213774E01 ACS 1000 WDocument73 pagesInstallation: Order No.: Customer: Equipment: Converter Type: Document: 3BHS213774E01 ACS 1000 WBastian ParedesNo ratings yet
- Ansi-Ieee 841 ArtDocument9 pagesAnsi-Ieee 841 ArtVICTOR JOSE VILORIANo ratings yet
- MasterClad-Non-Arc-Resistant - NEMA Academy 2015Document61 pagesMasterClad-Non-Arc-Resistant - NEMA Academy 2015cachilet100% (1)
- Tuning DC Drives Training Material: G. Franklin Stephenson Abb LTD BangaloreDocument56 pagesTuning DC Drives Training Material: G. Franklin Stephenson Abb LTD BangaloreRamaKrishna A100% (1)
- 4 3 Moran ApprovedDocument18 pages4 3 Moran ApprovedJonathanNo ratings yet
- Lbs Motorize Schneider RLDocument24 pagesLbs Motorize Schneider RLMohamad AriefNo ratings yet
- Ce Const2 132kv CB Siemens 2012 PDFDocument12 pagesCe Const2 132kv CB Siemens 2012 PDFOctavio EspañaNo ratings yet
- UM 1000water12 3BHS102768 RevG EnglishDocument190 pagesUM 1000water12 3BHS102768 RevG EnglishFarshad MahmoudiNo ratings yet
- E510-Manual (English) V07 20150825Document222 pagesE510-Manual (English) V07 20150825Bang BorilNo ratings yet
- Insulation Resistance Value Measurement (1.8.23)Document9 pagesInsulation Resistance Value Measurement (1.8.23)sandeep_bcplNo ratings yet
- EZ ThumpModelV3-12kV - DS - US - V04Document3 pagesEZ ThumpModelV3-12kV - DS - US - V04sandeep_bcplNo ratings yet
- Lux Meter ManualDocument6 pagesLux Meter Manualsandeep_bcplNo ratings yet
- Courseware - O&M of Valves & ActuatorsDocument154 pagesCourseware - O&M of Valves & Actuatorssandeep_bcplNo ratings yet
- Facts About InvertersDocument9 pagesFacts About Inverterssandeep_bcplNo ratings yet
- Motor DatasheetDocument12 pagesMotor Datasheetsandeep_bcplNo ratings yet
- GM150 Commissioning Manual PDFDocument358 pagesGM150 Commissioning Manual PDFsandeep_bcpl100% (2)
- GM150 Listenhandbuch LH3 0112 EngDocument1,480 pagesGM150 Listenhandbuch LH3 0112 Engsandeep_bcpl50% (2)
- Oisd STD 137Document45 pagesOisd STD 137sandy_nits100% (4)
- 21FG1RGDocument22 pages21FG1RGMelina Lara Lezama100% (1)
- Applications of Electromagnetic Induction TransformersDocument10 pagesApplications of Electromagnetic Induction Transformersapi-245497801No ratings yet
- Appendix-I: A Brief History of ElectricityDocument8 pagesAppendix-I: A Brief History of ElectricityjayantabhbasuNo ratings yet
- ULLD For Nohmi - Brand - (TN51483e - Rev.0)Document33 pagesULLD For Nohmi - Brand - (TN51483e - Rev.0)vu thien100% (1)
- Types of FuseDocument10 pagesTypes of FuseRane SiddeshNo ratings yet
- Industrial Electrician QFILEDocument32 pagesIndustrial Electrician QFILEVikyNo ratings yet
- NM230-F Form-Fit Damper Actuator 8 NMDocument4 pagesNM230-F Form-Fit Damper Actuator 8 NMNenad MutavdzicNo ratings yet
- Shinsung Distribution Eqpts.Document34 pagesShinsung Distribution Eqpts.joydeep_d3232No ratings yet
- Product Overview - ELKO EPDocument52 pagesProduct Overview - ELKO EPRazvan FarcasNo ratings yet
- 04 ResidualCurrentProtectiveDevices LV10 102023 en 202312061615170682Document92 pages04 ResidualCurrentProtectiveDevices LV10 102023 en 202312061615170682José CamposNo ratings yet
- Se-4e15 Avr Manual 2021Document10 pagesSe-4e15 Avr Manual 2021Kostas Ioannou50% (2)
- Ac Motor Controller: Daci Series F InverterDocument4 pagesAc Motor Controller: Daci Series F Inverternolasco rodriguezNo ratings yet
- Carmel Polytechnic College PUNNAPRA - 688 004Document34 pagesCarmel Polytechnic College PUNNAPRA - 688 004shuhaib nassarNo ratings yet
- Panasonic VF0 InvertersDocument4 pagesPanasonic VF0 InvertersTecnico 1 EmbarbaNo ratings yet
- OES2CABLESANDACCESSORIESDocument150 pagesOES2CABLESANDACCESSORIESSivanandNo ratings yet
- 80 Kva Modular Ups SpecDocument12 pages80 Kva Modular Ups SpecGebre Hailemariam BerheiNo ratings yet
- Section - : Exit To Main MenuDocument180 pagesSection - : Exit To Main Menuadi100% (2)
- Syllabus - EEE - IvyearDocument38 pagesSyllabus - EEE - IvyearSIETDOC100% (1)
- Chapter 6 - Electrical Motors Flashcards - QuizletDocument6 pagesChapter 6 - Electrical Motors Flashcards - QuizletAli UzairNo ratings yet
- Price ListDocument2 pagesPrice Listsaurabhjerps231221No ratings yet
- RM 23Document36 pagesRM 23Jabita Aguilera CabreraNo ratings yet
- E10-S01 - 0 Adjustable Freq Drive For Low Voltage MotorDocument11 pagesE10-S01 - 0 Adjustable Freq Drive For Low Voltage MotorMuhammad IrfanNo ratings yet
- Generation of Three Phase AC QuantityDocument6 pagesGeneration of Three Phase AC QuantityRenuka KutteNo ratings yet
- Technical Service Information: Automatic Transmission Service GroupDocument6 pagesTechnical Service Information: Automatic Transmission Service GroupfulltransmissionNo ratings yet
- Brochure CAT Advanced series-B-CATADV-112-ENDocument21 pagesBrochure CAT Advanced series-B-CATADV-112-ENSelk CLNo ratings yet
- Manual Inverter ABB PVS800 - 630Document14 pagesManual Inverter ABB PVS800 - 630Alejandro William AbagnaleNo ratings yet
- Att TP 76400 12Document48 pagesAtt TP 76400 12joserobertosolanoNo ratings yet
- Electric Traction - 1 PDFDocument46 pagesElectric Traction - 1 PDFbbbbbbbNo ratings yet