Basic Block Diagram of MTI Radar System:: 1-Transmitting Section 2 - Receiving Section
Basic Block Diagram of MTI Radar System:: 1-Transmitting Section 2 - Receiving Section
Download as docx, pdf, or txt
You might also like
- The Art of Looking SidewaysDocument5 pagesThe Art of Looking SidewaysLee Winters33% (3)
- FDMADocument66 pagesFDMApoojapriya204100% (3)
- Network Protocols and StandardsDocument4 pagesNetwork Protocols and StandardsPrathash Kumar100% (2)
- Workday Integration On Demand Whitepaper - OfficialDocument11 pagesWorkday Integration On Demand Whitepaper - OfficialPrashant Adhikari100% (1)
- Mti Radar:: 1.MTI Radar Principle and MTI Radar With Power Amplifier and Power OscillatorDocument16 pagesMti Radar:: 1.MTI Radar Principle and MTI Radar With Power Amplifier and Power OscillatorGopala Krishna Mazundar100% (1)
- RADAR SYSTEMS VR19-unit2Document59 pagesRADAR SYSTEMS VR19-unit2Mummana Mohan ShankarNo ratings yet
- Blind Speed and Staggered PRF - Notes FinalDocument6 pagesBlind Speed and Staggered PRF - Notes FinalNelarapuMaheshNo ratings yet
- Electronics and Communication Lab Manual PDFDocument41 pagesElectronics and Communication Lab Manual PDFtester100% (2)
- Communication Engineering Unit 1 Lecture 1Document22 pagesCommunication Engineering Unit 1 Lecture 1Deepak SinghNo ratings yet
- 1 Basics and Block Diagram of Digital CommunicationDocument54 pages1 Basics and Block Diagram of Digital Communicationsivaani sangeethaNo ratings yet
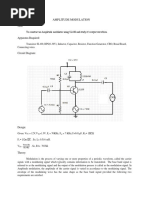
- FET Push-Pull Balanced Modulator: FET - A Non-Linear Device That Exhibits Square-Law Properties and Produce OnlyDocument2 pagesFET Push-Pull Balanced Modulator: FET - A Non-Linear Device That Exhibits Square-Law Properties and Produce OnlyKai Giruete100% (1)
- Types of Mixers in Radar ReceiversDocument23 pagesTypes of Mixers in Radar ReceiversFarin Mahzabeen50% (2)
- Classification of RADARsDocument5 pagesClassification of RADARsSaifudin Zuhri100% (1)
- Balanced Modulator Using DiodesDocument5 pagesBalanced Modulator Using DiodesJasdeep SinghNo ratings yet
- PCM Principles, Digital Multiplexing Hierarchy, Principles of MUX and Higher Order MUXDocument53 pagesPCM Principles, Digital Multiplexing Hierarchy, Principles of MUX and Higher Order MUXdeardestiny100% (1)
- Introduction To Communication SystemsDocument19 pagesIntroduction To Communication SystemsSolomon Tadesse AthlawNo ratings yet
- Principles of Electronic Communication Systems: Second Edition Louis FrenzelDocument41 pagesPrinciples of Electronic Communication Systems: Second Edition Louis FrenzelSwaminathan RajaramNo ratings yet
- Lab 5 FM Modulation DemodulationDocument5 pagesLab 5 FM Modulation DemodulationRida100% (1)
- Horn AntennaDocument18 pagesHorn AntennaMuhammad HashimNo ratings yet
- Chapter Three Mobile Radio Channel Modelling & Mitigations: 3.2 Mitigation Techniques For Fading Wireless ChannelsDocument34 pagesChapter Three Mobile Radio Channel Modelling & Mitigations: 3.2 Mitigation Techniques For Fading Wireless ChannelsChimd-AR DibaNo ratings yet
- Single Side BandDocument12 pagesSingle Side BandApril RodriquezNo ratings yet
- Balanced ModulatorDocument14 pagesBalanced ModulatorArchana Trivedi67% (3)
- Microprocessor Unit 4Document55 pagesMicroprocessor Unit 4Vekariya KaranNo ratings yet
- 8051 Timer CounterDocument40 pages8051 Timer Counterআশিক পালোয়ানNo ratings yet
- Monochrome TV TransmissionDocument2 pagesMonochrome TV TransmissionSam DyNo ratings yet
- 1.classification of Amplifiers, Distortions in AmplifiersDocument12 pages1.classification of Amplifiers, Distortions in AmplifiersMrs. P. Ganga BhavaniNo ratings yet
- Digital Frequency MeterDocument10 pagesDigital Frequency MeterSANTOSH THE DON100% (2)
- Lab - 3 Single - Stage MOSFET AmplifiersDocument11 pagesLab - 3 Single - Stage MOSFET AmplifiersMuhammad TehreemNo ratings yet
- Unit - Iv MultivibratorsDocument41 pagesUnit - Iv MultivibratorsSanjana PulapaNo ratings yet
- CDMA Basics Is-95 Forward & Reverse ChannelDocument41 pagesCDMA Basics Is-95 Forward & Reverse Channeldainbramaged16No ratings yet
- Communication SystemsDocument16 pagesCommunication SystemsLakshmiNo ratings yet
- Unit-3::Half Wave Rectifier, Ripple Factor, Full WaveDocument12 pagesUnit-3::Half Wave Rectifier, Ripple Factor, Full WaveHemant TulsaniNo ratings yet
- Architecture of Digital Signal Processor TMS320C54XDocument50 pagesArchitecture of Digital Signal Processor TMS320C54XNayan SenNo ratings yet
- Gunn Diode: Transferred Electron Device (Ted)Document20 pagesGunn Diode: Transferred Electron Device (Ted)Shreya RameshNo ratings yet
- Low and High Transmitter Block DiagramDocument6 pagesLow and High Transmitter Block DiagramRainier RamosNo ratings yet
- Chapter One Introduction To Antenna Systems PDFDocument64 pagesChapter One Introduction To Antenna Systems PDFAmare KassawNo ratings yet
- Amplifiers and OscillatorsDocument10 pagesAmplifiers and OscillatorsKapil Choudhary100% (2)
- MOSFETDocument4 pagesMOSFETelen19111036 KFUEITNo ratings yet
- Digital Communication Line Codes PDFDocument7 pagesDigital Communication Line Codes PDFAzImmNo ratings yet
- GSM Frame StructureDocument25 pagesGSM Frame StructureVarun SoodNo ratings yet
- Radar :radio Detection and Ranging Seminar ReportDocument18 pagesRadar :radio Detection and Ranging Seminar ReportRavindra Mathanker89% (9)
- Chapter 7 - Data Transmission and TelemetryDocument16 pagesChapter 7 - Data Transmission and Telemetryjst86No ratings yet
- Wireless Communication 2 MarksDocument14 pagesWireless Communication 2 MarksBala Subramani100% (2)
- Lica Unit-1 Notes (3-1 ECE)Document52 pagesLica Unit-1 Notes (3-1 ECE)vasantha_btech90% (20)
- Narrow-Band FM and Wide-Band FM: Presented by N.A.Pappathi Ap / Ece, NprcetDocument32 pagesNarrow-Band FM and Wide-Band FM: Presented by N.A.Pappathi Ap / Ece, NprcetShayaan PappathiNo ratings yet
- EC734 MWE PPT Unit 2 Module 2Document17 pagesEC734 MWE PPT Unit 2 Module 2Dinesh ReddyNo ratings yet
- Ldica Objective..Unit WiseDocument5 pagesLdica Objective..Unit WiseRAJOLI GIRISAI MADHAVNo ratings yet
- Mti and Pulsed DopplerDocument33 pagesMti and Pulsed DopplerWaqar Shaikh67% (3)
- Class Notes - Am & FM TransmittersDocument64 pagesClass Notes - Am & FM Transmittersvignesh__m100% (1)
- Characteristics of DSPDocument15 pagesCharacteristics of DSPParesh Sawant100% (1)
- Unit 2 - Radar Engineering - WWW - Rgpvnotes.inDocument16 pagesUnit 2 - Radar Engineering - WWW - Rgpvnotes.inPranav ChaturvediNo ratings yet
- Radar Unit 3Document29 pagesRadar Unit 3Vickey MNo ratings yet
- RS UNIT 3Document23 pagesRS UNIT 3Rajitha DatlaNo ratings yet
- 4 Mti Radar 1jan2021Document56 pages4 Mti Radar 1jan2021Pravin PrajapatiNo ratings yet
- RT-CH 4 - MTI and Pulse Doppler RadarDocument31 pagesRT-CH 4 - MTI and Pulse Doppler RadarHemant YadavNo ratings yet
- Unit 5 - MTInPDR - Part ADocument51 pagesUnit 5 - MTInPDR - Part AChandrashekher CNo ratings yet
- RS Unit 3Document14 pagesRS Unit 3ECE AKITSNo ratings yet
- MWE Radar Notes Set-2Document10 pagesMWE Radar Notes Set-2Yeslin SequeiraNo ratings yet
- Mti and Pulse Doppler RadarDocument50 pagesMti and Pulse Doppler RadarSaurabh KatiyarNo ratings yet
- Pulse Doppler RadarDocument7 pagesPulse Doppler RadarHimNo ratings yet
- MTI and Pulse Doppler RadarDocument24 pagesMTI and Pulse Doppler RadarHaswanth CHNo ratings yet
- Amateur Radio Electronics on Your MobileFrom EverandAmateur Radio Electronics on Your MobileRating: 5 out of 5 stars5/5 (1)
- UG - B.A.ENGLISH - Periyar University - SyllabusDocument108 pagesUG - B.A.ENGLISH - Periyar University - SyllabusSiddharth S KumarNo ratings yet
- 5 PDFDocument219 pages5 PDFChristina leeNo ratings yet
- Chương 2 Test BankDocument16 pagesChương 2 Test BankMỹ Huyền100% (1)
- Mock Bar Examination Questions in Legal Ethics and Legal and Judicial FormsDocument21 pagesMock Bar Examination Questions in Legal Ethics and Legal and Judicial FormsrolandbcaspeNo ratings yet
- Chapter 4 Organisational Structure and Design 1Document58 pagesChapter 4 Organisational Structure and Design 1GUDATA ABARANo ratings yet
- Gov Map TunnelsDocument34 pagesGov Map TunnelsMariusz S100% (1)
- LDM1 Procedure For Evaluating Outputs of LAC LeadersDocument12 pagesLDM1 Procedure For Evaluating Outputs of LAC LeadersMidas ArdsacsNo ratings yet
- Lab 11 ManualDocument6 pagesLab 11 Manualmubarik aliNo ratings yet
- MIDTERM EXAM Filipino PsyDocument7 pagesMIDTERM EXAM Filipino PsyJeffrey100% (1)
- NCERT Solutions For Class 12 Chemistry Chapter 4 Chemical KineticsDocument42 pagesNCERT Solutions For Class 12 Chemistry Chapter 4 Chemical KineticsAbhishek KumarNo ratings yet
- Neurociencia AdiccionesDocument18 pagesNeurociencia AdiccionesAlejandro GuevaraNo ratings yet
- Tum Master Thesis AuslandDocument4 pagesTum Master Thesis Auslandmichellewilsonvirginiabeach100% (2)
- 6 - Study Plan - MaretaliniaDocument5 pages6 - Study Plan - MaretaliniaMareta LiniaNo ratings yet
- Abnormal PsychologyDocument19 pagesAbnormal PsychologyEzekiel LiwanagNo ratings yet
- Flavours Price ListDocument10 pagesFlavours Price Listadnan54321No ratings yet
- The Man He KilledDocument2 pagesThe Man He KilledHans BacchooNo ratings yet
- Soal Bahasa Inggris Unit 1 Kelas VIIDocument7 pagesSoal Bahasa Inggris Unit 1 Kelas VIIAan Ramadhansyah0% (1)
- Environmental Impact AssessmentDocument24 pagesEnvironmental Impact AssessmentSeann Marquez100% (1)
- PAMI Basic Principles of Pain Management FinalDocument130 pagesPAMI Basic Principles of Pain Management FinalJisaNo ratings yet
- Positioning and Presenting Design Science Research For Maximum ImpactDocument6 pagesPositioning and Presenting Design Science Research For Maximum ImpactBehrooz DwazzaNo ratings yet
- Ielts Introduction SB Unit 1 Finding Out About The WorldDocument12 pagesIelts Introduction SB Unit 1 Finding Out About The WorldChristina Natalia PuspitaNo ratings yet
- Handcuffing SuspectsDocument25 pagesHandcuffing SuspectsRanier Factor Aguilar100% (1)
- Behavioural Economics Is Also Useful in MacroeconomicsDocument4 pagesBehavioural Economics Is Also Useful in MacroeconomicsmanvlogmanNo ratings yet
- Unit 2,2Document23 pagesUnit 2,2zixiangxu.andyNo ratings yet
- ENT 304 Leadership and Corporate Governance - 0Document191 pagesENT 304 Leadership and Corporate Governance - 0VEMPCOS NIGNo ratings yet
- Change Management in Hewlett Packard & Role of Carly FiorinaDocument38 pagesChange Management in Hewlett Packard & Role of Carly FiorinaSunil KatalNo ratings yet
- Advance Stage ResultsDocument2 pagesAdvance Stage ResultsAkash79No ratings yet
- Financial Accounting and Reporting (: Assignment #1)Document4 pagesFinancial Accounting and Reporting (: Assignment #1)Mary Elouise BundaNo ratings yet