BODAS Design Document
BODAS Design Document
Download as pdf or txt
At a glance
Powered by AI
The document discusses error detection techniques for various inputs and outputs on control systems.
Digital inputs, analog inputs, current inputs, and DSM frequency inputs can be diagnosed.
Short circuit to ground or open load, short circuit to battery or open load, and out of range.
You might also like
- Removing and Installing Onboard Supply Control Unit - J519Document2 pagesRemoving and Installing Onboard Supply Control Unit - J519Mark PageNo ratings yet
- Lifan Cross 200 LF200GY-5a Parts CatalogDocument44 pagesLifan Cross 200 LF200GY-5a Parts CatalogRoberto ClementeNo ratings yet
- 4TWX4036 Service FactsDocument4 pages4TWX4036 Service FactsAlejandro OrdoñezNo ratings yet
- Ddso-100 Hdso-100 User GuideDocument17 pagesDdso-100 Hdso-100 User GuideSturovo Turbo0% (1)
- RTD Scaler ISP Programming SOPDocument11 pagesRTD Scaler ISP Programming SOPpasmanteriabellaNo ratings yet
- Manual BeremizDocument24 pagesManual BeremizSergio MfNo ratings yet
- AT6356E microIFEM Piezo 4P4x PDFDocument64 pagesAT6356E microIFEM Piezo 4P4x PDFmilkicas266No ratings yet
- Stag Diesel - Manual Ver.1.2b enDocument39 pagesStag Diesel - Manual Ver.1.2b enTeodor AynadzhievNo ratings yet
- Getting Started On The AT91SAM7X-EK PDFDocument16 pagesGetting Started On The AT91SAM7X-EK PDFJohn DerteanoNo ratings yet
- 20-Service Manual Direct Petrol Injection and Ignition System (8-Cyl 4 2 LTR 4-Valve)Document75 pages20-Service Manual Direct Petrol Injection and Ignition System (8-Cyl 4 2 LTR 4-Valve)ДмитрийNo ratings yet
- Modeling of Over Current Relay Using MATLAB Simulink ObjectivesDocument6 pagesModeling of Over Current Relay Using MATLAB Simulink ObjectivesMashood Nasir67% (3)
- Thomson Electrac HD Linear Actuator Motion Control per CAN BusFrom EverandThomson Electrac HD Linear Actuator Motion Control per CAN BusNo ratings yet
- ATmega328 DatasheetDocument567 pagesATmega328 DatasheetEthan Carlisle Couto ArchibaldNo ratings yet
- M400 M600 M800 M880 Manual A5Document101 pagesM400 M600 M800 M880 Manual A5Hoff ZhangNo ratings yet
- SRI986 2MI A 001 enDocument32 pagesSRI986 2MI A 001 enclebeson_pontalNo ratings yet
- Bosch CC 750Document58 pagesBosch CC 750wtn2013No ratings yet
- Service Bulletin: Fuel Injection PumpDocument15 pagesService Bulletin: Fuel Injection PumpKrunoslavNo ratings yet
- FJD Autosteering Kit User Manual v2.1 - CompressedDocument84 pagesFJD Autosteering Kit User Manual v2.1 - CompressedOlivér KarmacsiNo ratings yet
- DE-5000 Portable, Full-Featured LCR Meter User and Service ManualDocument52 pagesDE-5000 Portable, Full-Featured LCR Meter User and Service ManualGuido PorruNo ratings yet
- IBM ThinkPad T42 Service ManualDocument260 pagesIBM ThinkPad T42 Service ManualluissilvaleiriaNo ratings yet
- Trionic 5 PDFDocument192 pagesTrionic 5 PDFAnderson ZambrzyckiNo ratings yet
- DG1022 Legacy LDR Update InstructionsDocument4 pagesDG1022 Legacy LDR Update InstructionsgunmoxNo ratings yet
- Stag200 Gofast Manual EngDocument18 pagesStag200 Gofast Manual EngAleksandar Bauman100% (1)
- Et STM32F103Document25 pagesEt STM32F103priyosantosaNo ratings yet
- SRX ManualDocument20 pagesSRX ManualLucas50% (2)
- Instrukcja Obslugi Mercedes GL 2007 (ENG)Document587 pagesInstrukcja Obslugi Mercedes GL 2007 (ENG)malypebikNo ratings yet
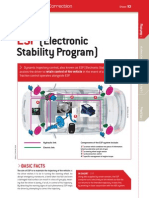
- Electronic Stability Program (ESP)Document2 pagesElectronic Stability Program (ESP)Kumar Ranjan100% (1)
- Prius 2004 - Brakes - BleedingDocument17 pagesPrius 2004 - Brakes - Bleedingburvi20011186No ratings yet
- Esab Vision 500 ManualDocument327 pagesEsab Vision 500 ManualHELIO SANTOS JUNIOR100% (1)
- Flir t620 Datasheet PDFDocument2 pagesFlir t620 Datasheet PDFBayu Jatmiko UtomoNo ratings yet
- PCF 7941Document1 pagePCF 7941Dmitriy DmitrievNo ratings yet
- Black BoxDocument7 pagesBlack Boxlokesh_045No ratings yet
- Alineadora 650 660 Lista de PartesDocument24 pagesAlineadora 650 660 Lista de PartesHenry AlvaxNo ratings yet
- Motronic 2.5 Operation BoschDocument6 pagesMotronic 2.5 Operation Boschgosheto2397No ratings yet
- CAT TonkaDocument24 pagesCAT TonkaGERSON RAFAEL CUAQUIRA MEDINA100% (1)
- Roboteq Controllers User Manual v18 PDFDocument384 pagesRoboteq Controllers User Manual v18 PDFJustin SimNo ratings yet
- AbsDocument11 pagesAbsStojan B. TasicNo ratings yet
- 2.6 SIEMENS SIMATIC ET200SP, Digital Input Module - 6ES7131-6BH00-0BA0Document26 pages2.6 SIEMENS SIMATIC ET200SP, Digital Input Module - 6ES7131-6BH00-0BA0Rakib HasanNo ratings yet
- Fotoelectricos Festo 275842dDocument52 pagesFotoelectricos Festo 275842dRichard WccNo ratings yet
- Quectel EG91 Series Hardware Design V2.0Document105 pagesQuectel EG91 Series Hardware Design V2.0PinNo ratings yet
- Electronic Throttle Body Datasheet 51 en 10726070795pdfDocument5 pagesElectronic Throttle Body Datasheet 51 en 10726070795pdfOsmar Franco PiresNo ratings yet
- Ingenico I5100 User Guide PDFDocument20 pagesIngenico I5100 User Guide PDFbjerre bjeffNo ratings yet
- Front Electronic Module FUB-FUB-FB-610002-K11 - V.9 (Interior Lighting Module) - ALLDATA RepairDocument16 pagesFront Electronic Module FUB-FUB-FB-610002-K11 - V.9 (Interior Lighting Module) - ALLDATA RepairfernandoNo ratings yet
- MERCEDES 722.6: Ause OmplaintDocument1 pageMERCEDES 722.6: Ause OmplaintVjollcaCuciNo ratings yet
- Using SST With Gen4 SystemsDocument8 pagesUsing SST With Gen4 SystemsdmaslachNo ratings yet
- TTC Manual - English - Ver 7-0Document156 pagesTTC Manual - English - Ver 7-0pradojuan100% (1)
- Treadmill 95T-DOMLX-DOMHX-INTHX-01 - Service - Manual - M051 - 00K65-A003Document94 pagesTreadmill 95T-DOMLX-DOMHX-INTHX-01 - Service - Manual - M051 - 00K65-A003powerliftermiloNo ratings yet
- EFIE-Duino: ConnectionsDocument7 pagesEFIE-Duino: Connectionsvenom1377No ratings yet
- FHPP Positioning Library Step7 enDocument42 pagesFHPP Positioning Library Step7 enMartin GuzmanNo ratings yet
- BLR-CA Banco CapacitoresDocument4 pagesBLR-CA Banco Capacitoresalex0% (1)
- Calculation Parameters (SC) Results (SC) Theory of Short Circuit Calculation Calculation of Partial Networks (SC)Document14 pagesCalculation Parameters (SC) Results (SC) Theory of Short Circuit Calculation Calculation of Partial Networks (SC)Cristian AndresNo ratings yet
- Capacitor 2Document4 pagesCapacitor 2karthikdote100% (1)
- Vector Surge RelayDocument20 pagesVector Surge RelayLuka YannamNo ratings yet
- Csepro F CatalogueDocument23 pagesCsepro F CatalogueecplpraveenNo ratings yet
- Source ModelingDocument13 pagesSource ModelingAbdel-Rahman Saifedin ArandasNo ratings yet
- Basic Stamp - Digital Signal ConditioningDocument27 pagesBasic Stamp - Digital Signal ConditioningRussellNo ratings yet
- Vector Surge Relay - MRG20000Document20 pagesVector Surge Relay - MRG20000t_syamprasadNo ratings yet
- P00C0Document5 pagesP00C0Willie AustineNo ratings yet
- 1MRG008054 en Application Note Function Description For High Impedance Busbar ProtectionDocument13 pages1MRG008054 en Application Note Function Description For High Impedance Busbar ProtectionOsama Ahmad Chaudhary100% (1)
- TSWDocument1 pageTSWPankaj RamoleNo ratings yet
- Slow Feed Valve BlockDocument12 pagesSlow Feed Valve BlockPankaj RamoleNo ratings yet
- Winch Pilot Proportional BlockDocument3 pagesWinch Pilot Proportional BlockPankaj RamoleNo ratings yet
- A11V0 1 Series - Mud Pump ControllerDocument1 pageA11V0 1 Series - Mud Pump ControllerPankaj RamoleNo ratings yet
- CCD100Document1 pageCCD100Pankaj RamoleNo ratings yet
- A4VG145CC - Rotation Pump ControllerDocument1 pageA4VG145CC - Rotation Pump ControllerPankaj RamoleNo ratings yet
- M4 12 - Valve Solenoid Proportional 1Document1 pageM4 12 - Valve Solenoid Proportional 1Pankaj RamoleNo ratings yet
- 1018 BI Ultra Beam LED HFA EN PDFDocument2 pages1018 BI Ultra Beam LED HFA EN PDFPankaj RamoleNo ratings yet
- TSW TTDocument2 pagesTSW TTPankaj RamoleNo ratings yet
- Water and Winch Pilot Prportional ValveDocument8 pagesWater and Winch Pilot Prportional ValvePankaj RamoleNo ratings yet
- Zelio Electromechanical Relay - RPF2BBDDocument6 pagesZelio Electromechanical Relay - RPF2BBDPankaj RamoleNo ratings yet
- Rittal 1001600 Technical Details 3 2868Document1 pageRittal 1001600 Technical Details 3 2868Pankaj RamoleNo ratings yet
- Spacial s3d Nsys3d5320pDocument2 pagesSpacial s3d Nsys3d5320pPankaj RamoleNo ratings yet
- Re51013 2014-11Document32 pagesRe51013 2014-11Pankaj RamoleNo ratings yet
- Murphy CAN GaugeDocument4 pagesMurphy CAN GaugePankaj RamoleNo ratings yet
- P-Q Controls, Inc.: Operations Manual Model 509 / 519Document6 pagesP-Q Controls, Inc.: Operations Manual Model 509 / 519Pankaj Ramole100% (2)
- Allen Bradley JoystickDocument3 pagesAllen Bradley JoystickPankaj RamoleNo ratings yet
- k4 Sealed Toggle SwitchesDocument40 pagesk4 Sealed Toggle SwitchesPankaj RamoleNo ratings yet
- BMS2 Error Codes List - Sep 2008Document1 pageBMS2 Error Codes List - Sep 2008Pankaj RamoleNo ratings yet
- MP PLD Pin ConnectionsDocument4 pagesMP PLD Pin ConnectionsPankaj RamoleNo ratings yet
- GasifikasiDocument29 pagesGasifikasiMartha GamalNo ratings yet
- Basic AC MotorsDocument13 pagesBasic AC Motorssrmohapatra5086No ratings yet
- Chapter 1 IGCSE - Edit - 2 - 27 April 2018 (No Comments)Document14 pagesChapter 1 IGCSE - Edit - 2 - 27 April 2018 (No Comments)Najia UmarNo ratings yet
- 1.operation PlanDocument9 pages1.operation PlanArchanaNo ratings yet
- Mayan Calendar System: HTTP://WWW - Ustream.tv/recorded/27679635Document50 pagesMayan Calendar System: HTTP://WWW - Ustream.tv/recorded/27679635John Pugno100% (3)
- x11 ModularDocument4 pagesx11 ModularHao XuNo ratings yet
- 1 s2.0 S1364032115012149 MainDocument12 pages1 s2.0 S1364032115012149 MainWuberestNo ratings yet
- PsocDocument1 pagePsocGayan ShashiNo ratings yet
- Chapter-1 SpillwayDocument22 pagesChapter-1 SpillwayzelalemniguseNo ratings yet
- Demand and Supply Crude OilDocument12 pagesDemand and Supply Crude OilMarketing Expert100% (2)
- Textbook - RPL v1.5 Dec 2020Document493 pagesTextbook - RPL v1.5 Dec 2020Batza BatsakisNo ratings yet
- TM65 Tool BEAMA Webinar Carl Collins Slides 1Document44 pagesTM65 Tool BEAMA Webinar Carl Collins Slides 1jack SplendorNo ratings yet
- TM 9-1787B M1 Heavy Tractor Allis-Chalmers HD-10WDocument328 pagesTM 9-1787B M1 Heavy Tractor Allis-Chalmers HD-10WAdvocate100% (1)
- Sulfur and Sulfuric AcidDocument20 pagesSulfur and Sulfuric AcidZakia LuthfianaNo ratings yet
- Full-Wave and Three - Phase RectifiersDocument55 pagesFull-Wave and Three - Phase Rectifierskornesuresh100% (1)
- South Stream Pan European ProjeDocument3 pagesSouth Stream Pan European Projechristiana_mNo ratings yet
- 50 JZDocument32 pages50 JZDiego MartinezNo ratings yet
- 4045hfu20 A15Document3 pages4045hfu20 A15OGNo ratings yet
- Power Plant Engineering: Aditya Engineering College (A) Aditya Engineering College (A)Document82 pagesPower Plant Engineering: Aditya Engineering College (A) Aditya Engineering College (A)Rajesh ShahNo ratings yet
- Setting Instructions For Perpetual Calendar Movement Caliber E760, E761, E76XDocument13 pagesSetting Instructions For Perpetual Calendar Movement Caliber E760, E761, E76XPaul ElliottNo ratings yet
- TH4M en Tcd210233ad 20230110 Inst WDocument1 pageTH4M en Tcd210233ad 20230110 Inst WHardi KurniawanNo ratings yet
- Infraredthermography PDFDocument21 pagesInfraredthermography PDFVitalyNo ratings yet
- Fans-And-Blowers LecturesDocument21 pagesFans-And-Blowers LecturesDeo WarrenNo ratings yet
- HFE InSolare - MH Park - CompressedDocument46 pagesHFE InSolare - MH Park - CompressedavanishNo ratings yet
- BASIC MECHANICAL ENGINEERING Lecture Notes 2 Part 1Document4 pagesBASIC MECHANICAL ENGINEERING Lecture Notes 2 Part 1Joanna SalandananNo ratings yet
- Compressor FundamentalsDocument28 pagesCompressor Fundamentalsbertan dağıstanlıNo ratings yet
- 40 Tips For An Exceptional Superb and Powerful LifeDocument3 pages40 Tips For An Exceptional Superb and Powerful Lifesieged_rj3165No ratings yet
- Operator Manual - ITC120 F8Document178 pagesOperator Manual - ITC120 F8Disd100% (1)
- User Manual: 3.2K / 5.2K 48V I NverterDocument38 pagesUser Manual: 3.2K / 5.2K 48V I NverterAbbasNo ratings yet
- New 12V New 12V: BK105 Metric Bolts Included in BoxDocument11 pagesNew 12V New 12V: BK105 Metric Bolts Included in BoxTalebNo ratings yet