Final: CS 188 Fall 2013 Introduction To Artificial Intelligence
Final: CS 188 Fall 2013 Introduction To Artificial Intelligence
Download as pdf or txt
You might also like
- cs188 sp19 Final SolDocument28 pagescs188 sp19 Final SolDũng MinhNo ratings yet
- HW3 SolsDocument5 pagesHW3 SolsDon NguyenNo ratings yet
- CSE 101 Homework 1 Solutions: Winter 2021Document3 pagesCSE 101 Homework 1 Solutions: Winter 2021Hoang NguyenNo ratings yet
- 2024 CSC14111 Lecture03 BacktrackingDocument29 pages2024 CSC14111 Lecture03 BacktrackingLuân Nguyễn ThànhNo ratings yet
- 2024 CSC14111 Lecture03 Backtracking MergedDocument170 pages2024 CSC14111 Lecture03 Backtracking MergedLuân Nguyễn ThànhNo ratings yet
- Final Exam: CS 188 Spring 2019 Introduction To Artificial IntelligenceDocument23 pagesFinal Exam: CS 188 Spring 2019 Introduction To Artificial IntelligenceMuhammad AwaisNo ratings yet
- Midterm Practice Problems: N N 1 N 2 N 3 N 4Document10 pagesMidterm Practice Problems: N N 1 N 2 N 3 N 4Lionel CarlosNo ratings yet
- 2022 Worksheet 2Document6 pages2022 Worksheet 2pzydf6wjxvNo ratings yet
- CIS 391/521: HW 2 - Search Solutions (Preliminary) : 1 Written Portion (35 PTS, 5 Points Each)Document7 pagesCIS 391/521: HW 2 - Search Solutions (Preliminary) : 1 Written Portion (35 PTS, 5 Points Each)Patrick Yeoho YoonNo ratings yet
- PVMT2024 TeamDocument2 pagesPVMT2024 Teamjakekuo38No ratings yet
- National Board For Higher MathematicsDocument6 pagesNational Board For Higher MathematicsPutrevu UmaMaheswararaoNo ratings yet
- 03 Randomgraphs PDFDocument66 pages03 Randomgraphs PDFEdward YraitaNo ratings yet
- Question - Maths 02 10 19Document14 pagesQuestion - Maths 02 10 19M KeningNo ratings yet
- Must Seeeeee AnsDocument16 pagesMust Seeeeee AnsNeda'a HamedNo ratings yet
- Exam CO March 2022 FinalDocument8 pagesExam CO March 2022 Finalsemihkilic1997No ratings yet
- XX Open Cup Grand Prix of Warsaw Editorial: Mateusz Radecki (Radewoosh) Marek Sokolowski (Mnbvmar) September 15, 2019Document9 pagesXX Open Cup Grand Prix of Warsaw Editorial: Mateusz Radecki (Radewoosh) Marek Sokolowski (Mnbvmar) September 15, 2019Roberto FrancoNo ratings yet
- Problem Set 2 (L. Centinaje)Document3 pagesProblem Set 2 (L. Centinaje)Leah CentinajeNo ratings yet
- Pgcs2018 SolutionsDocument9 pagesPgcs2018 SolutionsRishi DeyNo ratings yet
- CS1231 Mockmidterm CompleteDocument11 pagesCS1231 Mockmidterm CompleteRobert Fisher100% (1)
- Solutions To In-Class Problems Week 5, WedDocument5 pagesSolutions To In-Class Problems Week 5, WedrizkiNo ratings yet
- cs170 Fa2013 mt1 Rao SolnDocument10 pagescs170 Fa2013 mt1 Rao SolnimsNo ratings yet
- Exam cs120 2019 Ss SolutionsDocument7 pagesExam cs120 2019 Ss SolutionsHenry XuNo ratings yet
- Nef 2023 TutorialDocument9 pagesNef 2023 TutorialMd Sahin SirajNo ratings yet
- Quiz SolutionsDocument11 pagesQuiz Solutionsapi-34798317695% (20)
- Problem Set 2: InstructionsDocument4 pagesProblem Set 2: InstructionsballechaseNo ratings yet
- MIT6 042JS10 Lec39 SolDocument4 pagesMIT6 042JS10 Lec39 SolRaihan Kabir RifatNo ratings yet
- Problem Tutorial: "Apollonian Network"Document6 pagesProblem Tutorial: "Apollonian Network"Roberto FrancoNo ratings yet
- Ph106a 2019 SFinDocument17 pagesPh106a 2019 SFinPythonraptorNo ratings yet
- Quiz 1 A SolutionsDocument4 pagesQuiz 1 A SolutionsTamanna 1303No ratings yet
- COMP90038 2022S1 A1 SolutionsDocument4 pagesCOMP90038 2022S1 A1 Solutionsfrancisco realesNo ratings yet
- 6.5620 (6.875), Fall 2022: TemplateDocument4 pages6.5620 (6.875), Fall 2022: TemplateWenjun HouNo ratings yet
- Discrete Structure Revision Questions v1Document9 pagesDiscrete Structure Revision Questions v1jonathaneshak202No ratings yet
- cs188 Fa18 Final SolDocument26 pagescs188 Fa18 Final SolDũng MinhNo ratings yet
- Problem Tutorial: "Minimum Spanning Trees": I, J 0,1 0, J I, JDocument6 pagesProblem Tutorial: "Minimum Spanning Trees": I, J 0,1 0, J I, JRoberto FrancoNo ratings yet
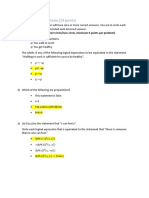
- Section A: Multiple Choice (24 Points) : (2 Points Each, - 1 Per Incorrect Circle/non-Circle, Minimum 0 Points Per Problem)Document11 pagesSection A: Multiple Choice (24 Points) : (2 Points Each, - 1 Per Incorrect Circle/non-Circle, Minimum 0 Points Per Problem)Rohit SuryavanshiNo ratings yet
- Vector Valued FunctionDocument3 pagesVector Valued FunctionsiddheshrakechaytNo ratings yet
- PUMDET-2018 82250001 Subject: Physics (Booklet Number) Duration: 90 Minutes Full Marks: 100Document10 pagesPUMDET-2018 82250001 Subject: Physics (Booklet Number) Duration: 90 Minutes Full Marks: 100Shreya DebnathNo ratings yet
- Midterm SolutionDocument11 pagesMidterm Solutionfrozenfire310803No ratings yet
- Solutions To Quiz 1Document8 pagesSolutions To Quiz 1Alireza KafaeiNo ratings yet
- 10-701/15-781, Machine Learning: Homework 1: Aarti Singh Carnegie Mellon UniversityDocument6 pages10-701/15-781, Machine Learning: Homework 1: Aarti Singh Carnegie Mellon Universitytarun guptaNo ratings yet
- ACM ICPC Finals 2012 SolutionsDocument5 pagesACM ICPC Finals 2012 Solutionsbarunbasak1No ratings yet
- Final 2003Document18 pagesFinal 2003Muhammad MurtazaNo ratings yet
- CS19M016 PGM Assignment1Document9 pagesCS19M016 PGM Assignment1avinashNo ratings yet
- Assignment 4 (Sol.) : Reinforcement LearningDocument6 pagesAssignment 4 (Sol.) : Reinforcement Learningsimar rocksNo ratings yet
- ECE 606, Fall 2019, Assignment 6: Zhijie Wang, Student ID Number: 20856733 Zhijie - Wang@uwaterloo - Ca October 22, 2019Document2 pagesECE 606, Fall 2019, Assignment 6: Zhijie Wang, Student ID Number: 20856733 Zhijie - Wang@uwaterloo - Ca October 22, 2019hstrybestNo ratings yet
- Topic 5Document32 pagesTopic 5hmood966No ratings yet
- Practice Questions 2Document13 pagesPractice Questions 2Prateek MehtaNo ratings yet
- Modular Arithmetic: Clocks and CirclesDocument3 pagesModular Arithmetic: Clocks and CirclesSaleh MuhammedNo ratings yet
- 18.785 Number Theory Fall 2017 Problem Set #4: The Instructor On The Due DateDocument5 pages18.785 Number Theory Fall 2017 Problem Set #4: The Instructor On The Due Datecrack wallNo ratings yet
- Solution: Cryptography - EndtermDocument5 pagesSolution: Cryptography - EndtermJun ParkNo ratings yet
- Hornsby Girls 2023 4U Trials & SolutionsDocument35 pagesHornsby Girls 2023 4U Trials & Solutionsramyasatchi02No ratings yet
- Problem Set 4Document5 pagesProblem Set 4AnthonyLobkoNo ratings yet
- Normo 2021 Extension 2 Mathematics TrialDocument13 pagesNormo 2021 Extension 2 Mathematics TrialSuleyman KumsuzNo ratings yet
- Theory of Computation Homework: P Is Closed Under Star OperationDocument2 pagesTheory of Computation Homework: P Is Closed Under Star OperationButch Ellen Grace SalemNo ratings yet
- Swept EllipsoidDocument14 pagesSwept EllipsoidkillerghostYTNo ratings yet
- Final Exam B - Spring 2021Document11 pagesFinal Exam B - Spring 2021eswarsai saiNo ratings yet
- 6b SolnDocument3 pages6b SolnOmar AhmedNo ratings yet
- Sydney Grammar 2022 4U Trials & SolutionsDocument34 pagesSydney Grammar 2022 4U Trials & Solutionsz5588894No ratings yet
- Crux v13n04 AprDocument37 pagesCrux v13n04 AprpedrocoelhornNo ratings yet
- De Moiver's Theorem (Trigonometry) Mathematics Question BankFrom EverandDe Moiver's Theorem (Trigonometry) Mathematics Question BankNo ratings yet
- Artificial Intelligence: State Space Heuristic Function (Goal State: G)Document7 pagesArtificial Intelligence: State Space Heuristic Function (Goal State: G)TryerNo ratings yet
- Uninformed Search: CS 4804 Fall 2020Document30 pagesUninformed Search: CS 4804 Fall 2020TryerNo ratings yet
- Informed Search: CS 4804 Fall 2020Document27 pagesInformed Search: CS 4804 Fall 2020TryerNo ratings yet
- Homework 5: Due On Jun 2, 2017Document6 pagesHomework 5: Due On Jun 2, 2017TryerNo ratings yet
- Links CandDocument3,377 pagesLinks CandTryerNo ratings yet
- Recursion: Data Structures and Algorithms in Java 1/25Document25 pagesRecursion: Data Structures and Algorithms in Java 1/25Tryer0% (1)
- Word2vec Parameter Learning Explained: Xin Rong Ronxin@umich - EduDocument21 pagesWord2vec Parameter Learning Explained: Xin Rong Ronxin@umich - EduTryerNo ratings yet
- Inducing Neural Models of Script KnowledgeDocument9 pagesInducing Neural Models of Script KnowledgeTryerNo ratings yet
- How The Statistical Revolution Changes (Computational) LinguisticsDocument14 pagesHow The Statistical Revolution Changes (Computational) LinguisticsTryerNo ratings yet
- How The Statistical Revolution Changes (Computational) LinguisticsDocument9 pagesHow The Statistical Revolution Changes (Computational) LinguisticsTryerNo ratings yet
- Generating Phrasal and Sentential Paraphrases: A Survey of Data-Driven MethodsDocument48 pagesGenerating Phrasal and Sentential Paraphrases: A Survey of Data-Driven MethodsTryerNo ratings yet
- Efficient Elicitation of Annotations For Human Evaluation of Machine TranslationDocument11 pagesEfficient Elicitation of Annotations For Human Evaluation of Machine TranslationTryerNo ratings yet
- The Role of University in Computers, PDFDocument9 pagesThe Role of University in Computers, PDFTryerNo ratings yet
- m4326svd ExampleDocument8 pagesm4326svd ExampleTryerNo ratings yet
- Reading and Writing SkillsDocument31 pagesReading and Writing Skillsyellow heiressNo ratings yet
- Icaf Aislamiento y Proteccion PersonalDocument1 pageIcaf Aislamiento y Proteccion PersonalMiguel Martinez GuerreroNo ratings yet
- A Capillary Viscometer For Characterization of Fluid FoodsDocument5 pagesA Capillary Viscometer For Characterization of Fluid FoodsYevit RodríguezNo ratings yet
- 03 - Topology Optimization For Additive Manufacturing As An Enabler For Light Weight Flight HardwareDocument22 pages03 - Topology Optimization For Additive Manufacturing As An Enabler For Light Weight Flight HardwareKalyude DiógenesNo ratings yet
- Contoh Tes AceptDocument28 pagesContoh Tes AceptNisa Nisa100% (2)
- Local Ï 1Document38 pagesLocal Ï 1Athena Monica Carmela AltamuraNo ratings yet
- Occurrence of Globally Threatened Hoya Pandurata Tsiang (Apocynaceae: Asclepiadoideae) in Manipur-A New Record For IndiaDocument5 pagesOccurrence of Globally Threatened Hoya Pandurata Tsiang (Apocynaceae: Asclepiadoideae) in Manipur-A New Record For IndiaDanish HusainNo ratings yet
- KHBD TIẾNG ANH 4 GLOBAL SUCCESS THEO CV 2345 WORD Unit 2Document32 pagesKHBD TIẾNG ANH 4 GLOBAL SUCCESS THEO CV 2345 WORD Unit 2Ha Phương LêNo ratings yet
- Technical Drafting 9 - Draft Site Development Plan Week 2-3Document20 pagesTechnical Drafting 9 - Draft Site Development Plan Week 2-3Mary-Angel AlastreNo ratings yet
- Application of Nanotechnology in Petroleum Exploration & DevelopmentDocument4 pagesApplication of Nanotechnology in Petroleum Exploration & DevelopmentHans wilsonNo ratings yet
- Score: - : Instruction: Read Carefully Each Personality To Answer The Questions BelowDocument2 pagesScore: - : Instruction: Read Carefully Each Personality To Answer The Questions Belowcarlos andres buritica salazarNo ratings yet
- Math 10 Q4 Weeks 3 To 4 Activity SheetDocument2 pagesMath 10 Q4 Weeks 3 To 4 Activity Sheetdenielle villalbaNo ratings yet
- WebtocDocument59 pagesWebtocGuillermo Soto VergaraNo ratings yet
- Evaluation Instrument of PSU Partner Agencies (Student)Document1 pageEvaluation Instrument of PSU Partner Agencies (Student)Grace GloriaNo ratings yet
- Assessing and Teaching Fluency Mini Lesson Template 1 - MergedDocument7 pagesAssessing and Teaching Fluency Mini Lesson Template 1 - Mergedapi-711290159No ratings yet
- Difference Between Goals and Objectives - Difference BetweenDocument15 pagesDifference Between Goals and Objectives - Difference BetweenJeru MacNo ratings yet
- Blue Iris Info I InstallDocument10 pagesBlue Iris Info I InstallharipekNo ratings yet
- Banker's Algorithms-Safety AlgorithmDocument2 pagesBanker's Algorithms-Safety AlgorithmishitaNo ratings yet
- Sirona Orthophos 3 Dental X-Ray - Maintenance InstructionsDocument32 pagesSirona Orthophos 3 Dental X-Ray - Maintenance InstructionsHAITHM MURSHEDNo ratings yet
- Chapter 5 - FLUID MECHANICSDocument33 pagesChapter 5 - FLUID MECHANICSJOHN REY DATARIO TAGOCONNo ratings yet
- Fusion 360 Simulation For DummiesDocument41 pagesFusion 360 Simulation For DummiesDejan MarkovicNo ratings yet
- Some Gas Dispersion Characteristics of Mechanical Otation MachinesDocument9 pagesSome Gas Dispersion Characteristics of Mechanical Otation MachinesjvchiqueNo ratings yet
- A New Year, and The Same Old Life: Name Class DateDocument3 pagesA New Year, and The Same Old Life: Name Class DateGameBGplayerNo ratings yet
- Billions of Dollars of Marketing Research For Free: by Clayton MakepeaceDocument11 pagesBillions of Dollars of Marketing Research For Free: by Clayton MakepeaceFilipe Dos SantosNo ratings yet
- Life and Career in North and South EuropeDocument324 pagesLife and Career in North and South EuropeDesiré Abrante RodríguezNo ratings yet
- Essay On The Lottery by Shirley JacksonDocument6 pagesEssay On The Lottery by Shirley Jacksonezkep38r100% (2)
- Oumfs-Iiib Intelligent Near Infrared Moisture MoDocument5 pagesOumfs-Iiib Intelligent Near Infrared Moisture MoClouds Osteen JoreinNo ratings yet
- PRACTICE TEST 5 For The GiftedDocument9 pagesPRACTICE TEST 5 For The Giftedle thuong tranNo ratings yet
- Artificial Immune Systems (AIS)Document50 pagesArtificial Immune Systems (AIS)luzflyNo ratings yet
- A Brief Introduction To Basic FunctionalDocument50 pagesA Brief Introduction To Basic FunctionalkiflomNo ratings yet