Position Estimator and Simplified Current Control Strategy For Brushless-Dc Motors, Using DSP Technology
Position Estimator and Simplified Current Control Strategy For Brushless-Dc Motors, Using DSP Technology
Download as pdf or txt
You might also like
- Communication Systems by R P Singh and SD Sapre PDFDocument2 pagesCommunication Systems by R P Singh and SD Sapre PDFTara25% (4)
- Simplified Sensorless Control For BLDC Motor, Using DSP TechnologyDocument12 pagesSimplified Sensorless Control For BLDC Motor, Using DSP Technologymichael.schuhNo ratings yet
- Prototyping Approach To Neuro-Fuzzy Speed Control of Trapezoidal Brushless DC MotorDocument6 pagesPrototyping Approach To Neuro-Fuzzy Speed Control of Trapezoidal Brushless DC MotorJournal of ComputingNo ratings yet
- Simplified Sensorless Control For BLDC MDocument12 pagesSimplified Sensorless Control For BLDC MAlg DimasNo ratings yet
- Simulation and Implementation of Current Control of Brushless DC Motor Based On A Common DC SignalDocument8 pagesSimulation and Implementation of Current Control of Brushless DC Motor Based On A Common DC SignalVally ZazaNo ratings yet
- Simulation and Implementation of Current Control of BLDC Motor Based On A Common DC SignalDocument8 pagesSimulation and Implementation of Current Control of BLDC Motor Based On A Common DC SignalNguyễn Trung HiếuNo ratings yet
- Simulation and Implementation of Current Control of Brushless DC Motor Based On A Common DC SignalDocument8 pagesSimulation and Implementation of Current Control of Brushless DC Motor Based On A Common DC SignalbijalmehtaNo ratings yet
- Current Control of Brushless DC Motor Based On A Common DC Signal For Space Operated VehicleDocument7 pagesCurrent Control of Brushless DC Motor Based On A Common DC Signal For Space Operated VehicleArif HassanNo ratings yet
- Speed Control of BLDC Motor Using DSP: 1 4 1 JNTUH Hyderabad, India 2 JNTUH Hyderabad, IndiaDocument5 pagesSpeed Control of BLDC Motor Using DSP: 1 4 1 JNTUH Hyderabad, India 2 JNTUH Hyderabad, IndiapravnkumarNo ratings yet
- Direct Torque Control of Brushless DC Motor: With Non-Sinusoidal Back-EMFDocument7 pagesDirect Torque Control of Brushless DC Motor: With Non-Sinusoidal Back-EMFGenaro Bessa CeppoNo ratings yet
- BLDC Motor ControlDocument6 pagesBLDC Motor ControlLalithNo ratings yet
- Brushless DC Motor Speed Control System of The Walking Aids MachineDocument4 pagesBrushless DC Motor Speed Control System of The Walking Aids MachineAl-ShukaNo ratings yet
- IET Electric Power Appl - 2017 - Valle - Unipolar PWM Predictive Current Mode Control of A Variable Speed Low InductanceDocument9 pagesIET Electric Power Appl - 2017 - Valle - Unipolar PWM Predictive Current Mode Control of A Variable Speed Low InductancesaipavanNo ratings yet
- BLDC Motor Speed Control ThesisDocument6 pagesBLDC Motor Speed Control ThesisSandra Long100% (2)
- BLDC Sepic Motor Torque ControlDocument60 pagesBLDC Sepic Motor Torque ControlSuresh SsbnNo ratings yet
- DC Link Approach To Variable-Speed, Sensorless,: Induction Motor DriveDocument5 pagesDC Link Approach To Variable-Speed, Sensorless,: Induction Motor DrivesamirmansourNo ratings yet
- Speed Control of Permanent Magnet Brushless DC Motor Using Fuzzy Logic Controller-Hardware ImplementationDocument5 pagesSpeed Control of Permanent Magnet Brushless DC Motor Using Fuzzy Logic Controller-Hardware ImplementationSofyan AhmadiNo ratings yet
- Ijert Ijert: Microcontroller Controlled BLDC Drive For Electric Vehicle Raju Yanamshetti, Juhi Nishat AnsariDocument4 pagesIjert Ijert: Microcontroller Controlled BLDC Drive For Electric Vehicle Raju Yanamshetti, Juhi Nishat AnsariAvinash Babu KmNo ratings yet
- SSRN Id3917884Document9 pagesSSRN Id3917884Asha PatilNo ratings yet
- Sensorless Control of A Brushless DC MotorDocument7 pagesSensorless Control of A Brushless DC MotorTrong LeNo ratings yet
- Direct Torque Control (DTC) of PMSM Using Space Vector Modulated Inverter: A Simulink ApproachDocument4 pagesDirect Torque Control (DTC) of PMSM Using Space Vector Modulated Inverter: A Simulink ApproachKushagra KhamesraNo ratings yet
- Dsp-Controlled Intelligent High-Performance AC Present FutureDocument8 pagesDsp-Controlled Intelligent High-Performance AC Present FuturePraful YadavNo ratings yet
- 5sensorlessBLDC PDFDocument7 pages5sensorlessBLDC PDFAlex CastilloNo ratings yet
- 2008 - A Low Cost Drive Strategy For BLDC Motor With Low Torque RipplesDocument4 pages2008 - A Low Cost Drive Strategy For BLDC Motor With Low Torque RipplesgrcatuNo ratings yet
- Simulation of Brushless DC Motor Speed Control in Matlab-Ijaerdv04i1290151Document7 pagesSimulation of Brushless DC Motor Speed Control in Matlab-Ijaerdv04i1290151Wairokpam DhanrajNo ratings yet
- EKF Applied To BLDCDocument9 pagesEKF Applied To BLDCUma SathyadevanNo ratings yet
- Paper - 5 Noise MinimizationDocument5 pagesPaper - 5 Noise MinimizationLTE002No ratings yet
- BLDC1Document5 pagesBLDC1elabam39No ratings yet
- Vsi Fed 3ph ImDocument13 pagesVsi Fed 3ph ImWisemin LinsNo ratings yet
- ST Motor Controller 1878Document22 pagesST Motor Controller 1878Ali ErNo ratings yet
- Paper 9Document5 pagesPaper 9SanthoshNo ratings yet
- 245915-FinalDocument13 pages245915-FinalUtkarsh PrakashNo ratings yet
- BLDCDocument53 pagesBLDCstarboyNo ratings yet
- 3530 3802 1 PBDocument7 pages3530 3802 1 PBAn NguyễnNo ratings yet
- Jacob 2016Document7 pagesJacob 2016TrơNhưNitơNo ratings yet
- A Voltage Regulator For Power Quality Improvement in Low-Voltage Distribution GridsDocument12 pagesA Voltage Regulator For Power Quality Improvement in Low-Voltage Distribution GridsSiva KumarNo ratings yet
- Overview of Industrial Motor Control SystemsDocument8 pagesOverview of Industrial Motor Control Systemsiwuo4797No ratings yet
- CHB Multilevel Inverter With Sliding Mode Controller For DSTATCOM ApplicationsDocument9 pagesCHB Multilevel Inverter With Sliding Mode Controller For DSTATCOM ApplicationsInternational Journal of Power Electronics and Drive SystemsNo ratings yet
- Four - Quadrant Control SystemsDocument4 pagesFour - Quadrant Control SystemsRICHARDNo ratings yet
- Sensorless Speed Controlled Brushless DC Drive Using The TMS320C242 DSP ControllerDocument17 pagesSensorless Speed Controlled Brushless DC Drive Using The TMS320C242 DSP ControllerVladv123No ratings yet
- Ee3009-Special Electrical Machines-288337885-Ee 3009 Sem Lab ManualDocument23 pagesEe3009-Special Electrical Machines-288337885-Ee 3009 Sem Lab ManualPrabuNo ratings yet
- Design and Simulation of Programmable AC-DC Converter Using Pulse Width Modulation (PWM) Techniques in MATLABDocument5 pagesDesign and Simulation of Programmable AC-DC Converter Using Pulse Width Modulation (PWM) Techniques in MATLABJeannot MpianaNo ratings yet
- Sensorless Speed Control of Brushless DC Motor With Fuzzy Based EstimationDocument7 pagesSensorless Speed Control of Brushless DC Motor With Fuzzy Based EstimationPhạm Văn TưởngNo ratings yet
- MPC Rizado TorqueDocument6 pagesMPC Rizado TorquesebastianG1995No ratings yet
- Development of A BLDC Motor Drive With Improved Output CharacteristicsDocument4 pagesDevelopment of A BLDC Motor Drive With Improved Output CharacteristicskurlshNo ratings yet
- Control of BLDC Motor Using MC56F84789: AbstractDocument4 pagesControl of BLDC Motor Using MC56F84789: Abstractshruti talekarNo ratings yet
- Using 27667Document8 pagesUsing 27667Ugwu ArinzeNo ratings yet
- 2015 Fast-SpeedDrivesforPermanentMagnetDocument7 pages2015 Fast-SpeedDrivesforPermanentMagnetjemmyducNo ratings yet
- Sensorless BLDC Driver Circuit (SVCE) - 212714403012 PDFDocument5 pagesSensorless BLDC Driver Circuit (SVCE) - 212714403012 PDFThiaga RajanNo ratings yet
- Filterless and Sensorless Commutation Method For BLDC MotorsDocument13 pagesFilterless and Sensorless Commutation Method For BLDC MotorsPeter MüllerNo ratings yet
- Egrid48402 2019 9092655Document5 pagesEgrid48402 2019 9092655maynaraNo ratings yet
- Mepco Schlenk Engineering CollegeDocument9 pagesMepco Schlenk Engineering CollegeT.JEMIMAPRICILLAHNo ratings yet
- BLDC Motor ControlDocument6 pagesBLDC Motor ControlLalithNo ratings yet
- Research Paper A Novel Method For Near State Pulse Width Modulation (NSPWM) Based Chopper DrivesDocument4 pagesResearch Paper A Novel Method For Near State Pulse Width Modulation (NSPWM) Based Chopper Drivesdivyamanikandan007No ratings yet
- Basic BLDC ControllerDocument9 pagesBasic BLDC ControllerRen KiyoshiiNo ratings yet
- Sensorless Speed Control of Brushless DCDocument5 pagesSensorless Speed Control of Brushless DCekrem kayaNo ratings yet
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetNo ratings yet
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetNo ratings yet
- Some Power Electronics Case Studies Using Matlab Simpowersystem BlocksetFrom EverandSome Power Electronics Case Studies Using Matlab Simpowersystem BlocksetNo ratings yet
- Power Systems-On-Chip: Practical Aspects of DesignFrom EverandPower Systems-On-Chip: Practical Aspects of DesignBruno AllardNo ratings yet
- Simulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorFrom EverandSimulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorNo ratings yet
- CV RamanDocument1 pageCV RamanhemantNo ratings yet
- MDU Question Papers, Sample Papers, Results, Contests Everthing For Free !! Register NowDocument65 pagesMDU Question Papers, Sample Papers, Results, Contests Everthing For Free !! Register Nowsumit gandhiNo ratings yet
- Akps SVL BrochureDocument4 pagesAkps SVL BrochureGeorge O.No ratings yet
- Bridge Type Sensor Measurements PDFDocument3 pagesBridge Type Sensor Measurements PDFSuvankar SasmalNo ratings yet
- pR6 40 8 3HPDocument2 pagespR6 40 8 3HPS.DharanipathyNo ratings yet
- E Ab 01-26 PDFDocument13 pagesE Ab 01-26 PDFJose M PeresNo ratings yet
- P V Q V Curve A Novel Approach For Voltage Stability Analysis PDFDocument5 pagesP V Q V Curve A Novel Approach For Voltage Stability Analysis PDFUzhansEell-neinoNo ratings yet
- Design of A Compact High Gain Microstrip Patch Antenna For Tri-Band 5 G Wireless CommunicationDocument9 pagesDesign of A Compact High Gain Microstrip Patch Antenna For Tri-Band 5 G Wireless CommunicationJuhi GargNo ratings yet
- Telemecanique Photoelectric Sensors XU XU5M18U1D DocumentDocument6 pagesTelemecanique Photoelectric Sensors XU XU5M18U1D DocumentHadNo ratings yet
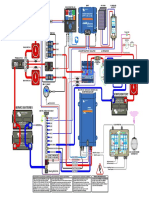
- 1.2KVA 12V MultiPlus 230 Volt System Example With Argo Fet and MPPTDocument1 page1.2KVA 12V MultiPlus 230 Volt System Example With Argo Fet and MPPTAlba Car Mar0% (1)
- DatasheetDocument4 pagesDatasheetJORGENo ratings yet
- Ac Fundamentals: Ethiopia Maritime Training InstituteDocument24 pagesAc Fundamentals: Ethiopia Maritime Training InstituteDan ManeaNo ratings yet
- Micro-Cap 9 Evaluation Version: Size LimitationsDocument8 pagesMicro-Cap 9 Evaluation Version: Size LimitationsAnonymous gB2dsimEj3No ratings yet
- 50 KW Solar - Project - by Nept SolarDocument13 pages50 KW Solar - Project - by Nept SolarShailendra Kumar VermaNo ratings yet
- Human Speed Detection ProjectDocument3 pagesHuman Speed Detection ProjectIJRASETPublications0% (1)
- Product Datasheet: Acti 9 iID - RCCB - 4P - 25A - 30ma - Type ACDocument3 pagesProduct Datasheet: Acti 9 iID - RCCB - 4P - 25A - 30ma - Type ACCivil EngineerNo ratings yet
- TP3231 00 - en UsDocument3 pagesTP3231 00 - en UsDaniel CalderonNo ratings yet
- 1308020EN Electrical EngineeringDocument20 pages1308020EN Electrical EngineeringamrehmaniNo ratings yet
- LS MCB & RCD CatalogDocument56 pagesLS MCB & RCD Catalogkmleongmy100% (1)
- A Survey of Micro-Actuator Technologies For Future Spacecraft MissionsDocument11 pagesA Survey of Micro-Actuator Technologies For Future Spacecraft Missionsalexandruanton8_4325No ratings yet
- SMART Transmitter Power Supply: Input Ch.1 Eex Ia Iic Input Ch.2 Eex Ia IicDocument4 pagesSMART Transmitter Power Supply: Input Ch.1 Eex Ia Iic Input Ch.2 Eex Ia IicAndy Kong KingNo ratings yet
- Model:: AE2425Z-GS3CDocument14 pagesModel:: AE2425Z-GS3Candrianimka100% (1)
- Assignment Stepper MotorDocument17 pagesAssignment Stepper MotorSaleem Akbar100% (1)
- Unit - Ii: Fibre Optics PhysicsDocument55 pagesUnit - Ii: Fibre Optics Physicsanon_233996424No ratings yet
- Mi 3250 Microohm 10A: Continuity TestersDocument2 pagesMi 3250 Microohm 10A: Continuity TestersManolo PhintoNo ratings yet
- A Project Report OnDocument80 pagesA Project Report OnChandan SrivastavaNo ratings yet
- FBs 4DADocument4 pagesFBs 4DAJoako FilipovichNo ratings yet
- Celda de Carga Tipo Z Sensortronics - 60050 (Molinos de Pasta)Document1 pageCelda de Carga Tipo Z Sensortronics - 60050 (Molinos de Pasta)Schiraldi BonillaNo ratings yet
- Busbar Selection ChartDocument1 pageBusbar Selection ChartSumaja Electroinfra Pvt LtdNo ratings yet