Ds
Ds
Download as pdf or txt
You might also like
- Boyce W.E., DiPrima R.C. Elementary Differential Equations and Boundary Value Problems 2009-Pages-454-464Document11 pagesBoyce W.E., DiPrima R.C. Elementary Differential Equations and Boundary Value Problems 2009-Pages-454-464Nurul Rafiqah Nasution100% (1)
- CH 7.9: Nonhomogeneous Linear Systems: The General Theory of A Nonhomogeneous System of EquationsDocument21 pagesCH 7.9: Nonhomogeneous Linear Systems: The General Theory of A Nonhomogeneous System of EquationsVSRI1993No ratings yet
- Ls 5Document5 pagesLs 5jordan1412No ratings yet
- MA417 Lecture 24Document9 pagesMA417 Lecture 24Jittu YadavNo ratings yet
- Analisa NumerikDocument62 pagesAnalisa Numerikmohammad affanNo ratings yet
- DIFFERENTIAL SYSTEMS WITH A SMALL PARAMETER - LlivreDocument9 pagesDIFFERENTIAL SYSTEMS WITH A SMALL PARAMETER - LlivreSonia Isabel Renteria AlvaNo ratings yet
- On The Asymptotic Nature of A Class of Second Order Nonlinear SystemsDocument22 pagesOn The Asymptotic Nature of A Class of Second Order Nonlinear SystemsprofjnapolesNo ratings yet
- Dynamical Systems: An LTCC CourseDocument53 pagesDynamical Systems: An LTCC CourseRoy VeseyNo ratings yet
- 5.74 Time-Dependent Quantum Mechanics: R, T I R, TDocument12 pages5.74 Time-Dependent Quantum Mechanics: R, T I R, Tdebashis22mNo ratings yet
- A Procedure For Determining The Exact Solution To A 2x2 First OrdDocument16 pagesA Procedure For Determining The Exact Solution To A 2x2 First OrdTomislav JagodicNo ratings yet
- An Extension of Barbashin-Krasovski-Lasalle Theorem To A Class of Nonautonomous SystemsDocument12 pagesAn Extension of Barbashin-Krasovski-Lasalle Theorem To A Class of Nonautonomous SystemsalirezafakhrNo ratings yet
- Stability Numerical SchemesDocument15 pagesStability Numerical SchemesMary DelgadoNo ratings yet
- Systems of Differential EccuationsDocument16 pagesSystems of Differential EccuationsRaulNo ratings yet
- VI. Notes (Played) On The Vibrating StringDocument20 pagesVI. Notes (Played) On The Vibrating Stringjose2017No ratings yet
- Time-Domain Solution of LTI State Equations: 2.14 Analysis and Design of Feedback Control SystemsDocument32 pagesTime-Domain Solution of LTI State Equations: 2.14 Analysis and Design of Feedback Control SystemsGoodie SidNo ratings yet
- Lectut MAN 647 Doc Lecture Controllability LinearDocument18 pagesLectut MAN 647 Doc Lecture Controllability LinearSoumyadeep BoseNo ratings yet
- July 1, 2009 11:54 WSPC/102-IDAQPRT 00360Document17 pagesJuly 1, 2009 11:54 WSPC/102-IDAQPRT 00360Mehdi RezaieNo ratings yet
- Exponential Dichotomy: Zhisheng Shuai Department of Mathematical and Statistical Sciences University of AlbertaDocument7 pagesExponential Dichotomy: Zhisheng Shuai Department of Mathematical and Statistical Sciences University of AlbertaoxxidNo ratings yet
- Research StatementDocument5 pagesResearch StatementEmad AbdurasulNo ratings yet
- Generalización Del Teorema de DarboDocument10 pagesGeneralización Del Teorema de DarbowilmerNo ratings yet
- Application of Lie-Group Symmetry AnalysisDocument35 pagesApplication of Lie-Group Symmetry Analysiscatfan42No ratings yet
- Class1 ReadingDocument17 pagesClass1 ReadingJay acebedoNo ratings yet
- Correlator Solution: 1 Collocation MethodDocument10 pagesCorrelator Solution: 1 Collocation MethodMuzamil ShahNo ratings yet
- Convergence in Nonlinear Systems With A Forcing Term: 1 PreliminarsDocument4 pagesConvergence in Nonlinear Systems With A Forcing Term: 1 PreliminarsprofjnapolesNo ratings yet
- Lipschitz Continuity and SemiconcDocument14 pagesLipschitz Continuity and Semiconctakamiya980921No ratings yet
- Introduction To Stochastic Processes: Master INVESMAT 2017-2018 Unit 3Document50 pagesIntroduction To Stochastic Processes: Master INVESMAT 2017-2018 Unit 3Ainhoa AzorinNo ratings yet
- Aircraft Dynamic Stability AnalysisDocument29 pagesAircraft Dynamic Stability AnalysisIaNickNo ratings yet
- bMATH 2018 FolkersEDocument31 pagesbMATH 2018 FolkersEsahlewel weldemichaelNo ratings yet
- MIT18 034s09 Lec0Document3 pagesMIT18 034s09 Lec0OmarEsparzaNo ratings yet
- OpenprobDocument12 pagesOpenprobemilNo ratings yet
- Geometrie Avansati LB EnglezaDocument41 pagesGeometrie Avansati LB EnglezaMaraMarutzNo ratings yet
- A Note On The Asymptotic Stability in The Whole of Non-Autonomous SystemsDocument8 pagesA Note On The Asymptotic Stability in The Whole of Non-Autonomous SystemsprofjnapolesNo ratings yet
- Fourier Series ApplicationDocument10 pagesFourier Series Application9th P/C completedNo ratings yet
- Set Valued Fractional Order DiffereDocument11 pagesSet Valued Fractional Order Differehovu.hutechNo ratings yet
- On Symmetric and Periodic Solutions of Parametric Weakly Nonlinear ODE With Time-Reversal SymmetriesDocument28 pagesOn Symmetric and Periodic Solutions of Parametric Weakly Nonlinear ODE With Time-Reversal Symmetriesanderjoe20No ratings yet
- Dynamics and Differential EquationsDocument30 pagesDynamics and Differential EquationsHusseinali HusseinNo ratings yet
- More General Credibility Models: F F P F FDocument6 pagesMore General Credibility Models: F F P F FAdriana CalinNo ratings yet
- Andersson Djehiche - AMO 2011Document16 pagesAndersson Djehiche - AMO 2011artemischen0606No ratings yet
- Applicable Analysis and Discrete Mathematics: doi:10.2298/AADM0902242BDocument11 pagesApplicable Analysis and Discrete Mathematics: doi:10.2298/AADM0902242BTamer ŞenelNo ratings yet
- Analytical - FinalDocument10 pagesAnalytical - FinalHayder AlsarajNo ratings yet
- Periodic Solutions of Linear Integro-Differential EquationsDocument10 pagesPeriodic Solutions of Linear Integro-Differential EquationsAntonio Torres PeñaNo ratings yet
- Averaging Oscillations With Small Fractional Damping and Delay TermsDocument20 pagesAveraging Oscillations With Small Fractional Damping and Delay TermsAdireddi BalajiNo ratings yet
- Loss of Energy Concentration in Nonlinear Evolution Beam Equations (Journal of Nonlinear Science) (2017)Document39 pagesLoss of Energy Concentration in Nonlinear Evolution Beam Equations (Journal of Nonlinear Science) (2017)rxflexNo ratings yet
- Pages 16 To 23 (Annotated)Document8 pagesPages 16 To 23 (Annotated)Victor BenedictNo ratings yet
- Hamiltonian ChaosDocument17 pagesHamiltonian ChaosMainak ChatterjeeNo ratings yet
- Schur Function Expansion For Normal Matrix Model and Associated Discrete Matrix ModelsDocument21 pagesSchur Function Expansion For Normal Matrix Model and Associated Discrete Matrix Modelssureshpareth8306No ratings yet
- Galerkin's Proce&re For Nonlinear Periodic Systems: Communicated byDocument33 pagesGalerkin's Proce&re For Nonlinear Periodic Systems: Communicated bytanha56313955No ratings yet
- Existence Theory and Properties of Solutions: TH (N) (N THDocument24 pagesExistence Theory and Properties of Solutions: TH (N) (N THGeof180No ratings yet
- Fundition ChaosDocument25 pagesFundition ChaosRogério da silva santosNo ratings yet
- Time-Dependent Solutions For Stochastic Systems With Delays Perturbation Theory and Applications To Financial PhysicsDocument9 pagesTime-Dependent Solutions For Stochastic Systems With Delays Perturbation Theory and Applications To Financial PhysicsArmando Salas IparrazarNo ratings yet
- Duhamel's PrincipleDocument6 pagesDuhamel's PrinciplezelihahaNo ratings yet
- Chapter 2. Thermodynamics: S, N P P, N V P T, NDocument10 pagesChapter 2. Thermodynamics: S, N P P, N V P T, NVictor EnemNo ratings yet
- Finite Time TVDocument12 pagesFinite Time TVBharathNo ratings yet
- Chapter 2 - State Space FundamentalsDocument60 pagesChapter 2 - State Space FundamentalsaaaaaaaaaaaaaaaaaaaaaaaaaNo ratings yet
- Uniform Asymptotic Stability of Linear Time-Varying SystemsDocument2 pagesUniform Asymptotic Stability of Linear Time-Varying SystemsqiuqiusbxNo ratings yet
- Linear SystemsDocument44 pagesLinear SystemsrajuvadlakondaNo ratings yet
- Green's Function Estimates for Lattice Schrödinger Operators and ApplicationsFrom EverandGreen's Function Estimates for Lattice Schrödinger Operators and ApplicationsNo ratings yet
- Harmonic Maps and Minimal Immersions with Symmetries: Methods of Ordinary Differential Equations Applied to Elliptic Variational ProblemsFrom EverandHarmonic Maps and Minimal Immersions with Symmetries: Methods of Ordinary Differential Equations Applied to Elliptic Variational ProblemsNo ratings yet
- Algebra Course05Document5 pagesAlgebra Course05Pop RobertNo ratings yet
- Algebra Course01Document5 pagesAlgebra Course01Pop RobertNo ratings yet
- Lab Maple8 TutorialDocument10 pagesLab Maple8 TutorialPop RobertNo ratings yet
- Course 4: 22.10.2020 2.3 Generated Subspace: I I I I I IDocument5 pagesCourse 4: 22.10.2020 2.3 Generated Subspace: I I I I I IPop RobertNo ratings yet
- Course 3: 15.10.2020 Chapter 2 Vector SpacesDocument5 pagesCourse 3: 15.10.2020 Chapter 2 Vector SpacesPop RobertNo ratings yet
- Algebra Course02Document5 pagesAlgebra Course02Pop RobertNo ratings yet
- Linear Differential Equations. ProblemsDocument14 pagesLinear Differential Equations. ProblemsPop RobertNo ratings yet
- Analytic Equations: 4.1 Power SeriesDocument21 pagesAnalytic Equations: 4.1 Power SeriesPop RobertNo ratings yet
- Existence and Regularity of SolutionsDocument22 pagesExistence and Regularity of SolutionsPop RobertNo ratings yet
- Logica Matematica Curs 01Document7 pagesLogica Matematica Curs 01Pop RobertNo ratings yet
- Oscillation Theory and The Spectra of Eigenvalues: 11.1 The PR Ufer SubstitutionDocument30 pagesOscillation Theory and The Spectra of Eigenvalues: 11.1 The PR Ufer SubstitutionPop RobertNo ratings yet
- Logica Matematica Curs 14 (Exercitii)Document8 pagesLogica Matematica Curs 14 (Exercitii)Pop RobertNo ratings yet
- Publications List Radu MiculescuDocument5 pagesPublications List Radu MiculescuPop RobertNo ratings yet
- The General, Linear EquationDocument32 pagesThe General, Linear EquationPop RobertNo ratings yet
- Graphs Lab1 DocumentationDocument2 pagesGraphs Lab1 DocumentationPop RobertNo ratings yet
- NfovDocument2 pagesNfovPop RobertNo ratings yet
- Init - : Directedgraph: (Number - of - Vertices)Document5 pagesInit - : Directedgraph: (Number - of - Vertices)Pop RobertNo ratings yet
- Chapter 01 - Combinatorial AnalysisDocument25 pagesChapter 01 - Combinatorial AnalysisSevgiNo ratings yet
- Exploring Sine and Cosine Graphs Learning TaskDocument11 pagesExploring Sine and Cosine Graphs Learning TaskenesffsNo ratings yet
- Chapter 3 SetsDocument74 pagesChapter 3 Setsjuriah binti ibrahimNo ratings yet
- Paradigm 2023 O Level AM P2 AnalysisDocument78 pagesParadigm 2023 O Level AM P2 AnalysiswjNo ratings yet
- Chapter 1Document5 pagesChapter 1Nar NarNo ratings yet
- Static Condensation NotesDocument7 pagesStatic Condensation Notesanisha2007No ratings yet
- 04-Numerical AnalysisDocument13 pages04-Numerical AnalysisAEX3 111No ratings yet
- MATHEMATICS Mind MapDocument13 pagesMATHEMATICS Mind MapSHANKARNo ratings yet
- Cheat Sheet - Vector Algebra: Scalar Multiplication: Dot ProductDocument1 pageCheat Sheet - Vector Algebra: Scalar Multiplication: Dot ProductcoldplateNo ratings yet
- EE REV REPORT - LagatuzDocument30 pagesEE REV REPORT - LagatuzPatrick HapitaNo ratings yet
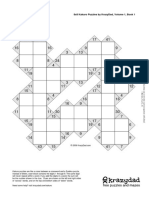
- Kakuro #1: 8X8 Kakuro Puzzles by Krazydad, Volume 1, Book 1Document9 pagesKakuro #1: 8X8 Kakuro Puzzles by Krazydad, Volume 1, Book 1Aashirtha SNo ratings yet
- Guc 2 61 38781 2023-11-25T16 29 04Document3 pagesGuc 2 61 38781 2023-11-25T16 29 04joeplays451No ratings yet
- Mathematics: CatalogueDocument16 pagesMathematics: CatalogueVandana Tiwari0% (1)
- MP Board Class 12 Higher Mathematics Previous Year Paper 2018Document5 pagesMP Board Class 12 Higher Mathematics Previous Year Paper 2018Varun PatidarNo ratings yet
- Solving The Modular Exam Scheduling Problem With Genetic AlgorithmsDocument8 pagesSolving The Modular Exam Scheduling Problem With Genetic AlgorithmsNiveditha TamilselvanNo ratings yet
- Calculus 1 AnswerDocument2 pagesCalculus 1 AnswerPhil Harold NeraNo ratings yet
- Polynomials: Points To RememberDocument12 pagesPolynomials: Points To RememberSipra PaulNo ratings yet
- Math F211 - Compre-QbDocument2 pagesMath F211 - Compre-Qbf20221235No ratings yet
- Assignment01 PDFDocument3 pagesAssignment01 PDFHong Chul Nam100% (1)
- Week 2: Sequences and Series: ProblemsDocument2 pagesWeek 2: Sequences and Series: Problemsbob333No ratings yet
- 2.CS701 Good 2 PDFDocument35 pages2.CS701 Good 2 PDFMazhar HussainNo ratings yet
- LP Class 9Document15 pagesLP Class 9Radhika Singh100% (1)
- Calculus of Variation by GoshiDocument34 pagesCalculus of Variation by GoshiSunkara Hemanth KumarNo ratings yet
- Final Module 4 The Language of SetsDocument12 pagesFinal Module 4 The Language of SetsLuccine ShinNo ratings yet
- Study Notes Roots of Equations - Open Methods RevADocument13 pagesStudy Notes Roots of Equations - Open Methods RevAKay DevchandNo ratings yet
- Gr9math Q1W1 - LasDocument22 pagesGr9math Q1W1 - LasIvanhoe BalaroteNo ratings yet
- Jee 2024Document8 pagesJee 2024Md ArabiNo ratings yet
- Limit and ContinuityDocument26 pagesLimit and Continuitynoobtuber133No ratings yet
- Arthemitec SeqDocument20 pagesArthemitec SeqmissxpredatorNo ratings yet