XCS LBP
XCS LBP
Download as pdf or txt
You might also like
- Anthony, Julia, and Cindy - Lab 13Document12 pagesAnthony, Julia, and Cindy - Lab 13Anthony HowerNo ratings yet
- Graded Quiz - Test Your Project Understanding - Coursera2Document1 pageGraded Quiz - Test Your Project Understanding - Coursera2Ram Murthy0% (1)
- Raft Foundation Design BS8110Document9 pagesRaft Foundation Design BS8110Poru Man100% (3)
- Visapp 2015Document9 pagesVisapp 2015Kiệt NguyễnNo ratings yet
- Mot MTPDocument14 pagesMot MTPEl merabetNo ratings yet
- Session 15-1 MultimodalDocument82 pagesSession 15-1 MultimodalrearcowNo ratings yet
- Orientación Basado en Kinect Robusto y Posicionamiento de Un Robot Multidireccional Mediante El Reconocimiento Log-AbDocument12 pagesOrientación Basado en Kinect Robusto y Posicionamiento de Un Robot Multidireccional Mediante El Reconocimiento Log-AbtoranagasanNo ratings yet
- Vehicle Logo Recognition by Spatial-SIFT Combined With Logistic RegressionDocument9 pagesVehicle Logo Recognition by Spatial-SIFT Combined With Logistic Regressionminh nguyenNo ratings yet
- Rachdi 2022Document7 pagesRachdi 2022El merabetNo ratings yet
- Tips and Tricks HPLC TroubleshootingDocument7 pagesTips and Tricks HPLC TroubleshootingFelipe MonteroNo ratings yet
- Visión ComputalizadaDocument27 pagesVisión ComputalizadaVictoria NarroNo ratings yet
- 4FP StructureDocument15 pages4FP Structurerekka mastouriNo ratings yet
- Plenary Feb 27 2017Document25 pagesPlenary Feb 27 2017Andrea RicaNo ratings yet
- Conference 101719Document7 pagesConference 101719El merabetNo ratings yet
- Ip PDFDocument1 pageIp PDFursbestfriendNo ratings yet
- Robust Active Stereo CalibrationDocument8 pagesRobust Active Stereo Calibrationqiaowen wangNo ratings yet
- Use Map EstimationFor Image SharpeningDocument4 pagesUse Map EstimationFor Image SharpeningInternational Organization of Scientific Research (IOSR)No ratings yet
- ArticleDocument27 pagesArticlehakan ulucanNo ratings yet
- Paper - 2008 - Scaling of The LED Collimators With Folded Multiple ReflectionsDocument8 pagesPaper - 2008 - Scaling of The LED Collimators With Folded Multiple ReflectionsPaulNo ratings yet
- Liris 5004Document18 pagesLiris 5004chemlelachrafNo ratings yet
- Face Description With Local Binary Patterns: Application To Face RecognitionDocument15 pagesFace Description With Local Binary Patterns: Application To Face RecognitionMani KandanNo ratings yet
- Liu 2021Document32 pagesLiu 2021murshid zaman bhuiyanNo ratings yet
- Wavelet Based Analysis of Medical Image Fusion Using MATLAB GUIDocument7 pagesWavelet Based Analysis of Medical Image Fusion Using MATLAB GUIRudresh RakeshNo ratings yet
- Pocket Guide To Solve Inverse Problem With Global BioimDocument21 pagesPocket Guide To Solve Inverse Problem With Global BioimAsim AsrarNo ratings yet
- Local Derivative Pattern Versus Local Binary Pattern: Face Recognition With High-Order Local Pattern DescriptorDocument13 pagesLocal Derivative Pattern Versus Local Binary Pattern: Face Recognition With High-Order Local Pattern DescriptorMuhammad Zaka Ud DinNo ratings yet
- Locally Linear Embedding and Its Variants: Tutorial and SurveyDocument23 pagesLocally Linear Embedding and Its Variants: Tutorial and SurveyMehranMalekiNo ratings yet
- CaseStudy ICT2019 ExtendedDocument10 pagesCaseStudy ICT2019 Extendedandesong88No ratings yet
- 2002 WaldBookFusion Cha8 QualDocument22 pages2002 WaldBookFusion Cha8 QualEdwin Hernán HurtadoNo ratings yet
- The Impact of Symbiotic Information On Complexity Theory: Heap DMADocument3 pagesThe Impact of Symbiotic Information On Complexity Theory: Heap DMAYu XuNo ratings yet
- savedrecs (10)Document30 pagessavedrecs (10)rodrigo toshimiNo ratings yet
- Scaling Vision Transformer 22bDocument41 pagesScaling Vision Transformer 22bprasadvivek004No ratings yet
- Moving Object Detection Using Local Binary Pattern and Gaussian Background ModelDocument10 pagesMoving Object Detection Using Local Binary Pattern and Gaussian Background ModelJEEVIT HNo ratings yet
- Enhancement of Medical Image Fusion Using Joint Sparse MethodDocument6 pagesEnhancement of Medical Image Fusion Using Joint Sparse MethodlambanaveenNo ratings yet
- Local Binary Patterns and Its Application To Facial Image Analysis: A SurveyDocument17 pagesLocal Binary Patterns and Its Application To Facial Image Analysis: A SurveySuraj Kumar DasNo ratings yet
- S F: S F I N C G: Patial Uncta Caling Uncta To Mage ET Lassification and EnerationDocument24 pagesS F: S F I N C G: Patial Uncta Caling Uncta To Mage ET Lassification and EnerationKoterwas DawidNo ratings yet
- Sun 2022 J. Phys. Conf. Ser. 2215 012027Document6 pagesSun 2022 J. Phys. Conf. Ser. 2215 012027essamabdelhamiedNo ratings yet
- Efficient Light Field Angular Super-Resolution With Sub-Aperture Feature Learning and Macro-Pixel UpsamplingDocument13 pagesEfficient Light Field Angular Super-Resolution With Sub-Aperture Feature Learning and Macro-Pixel UpsamplingAhmedDiefyNo ratings yet
- Visualization TechreportDocument14 pagesVisualization TechreportMateusz ŁugowskiNo ratings yet
- Visualizing Branch-and-Bound Algorithms: Osman Y. Ozaltın, Brady HunsakerDocument18 pagesVisualizing Branch-and-Bound Algorithms: Osman Y. Ozaltın, Brady HunsakerAshish KapoorNo ratings yet
- 2303.00848v7Document33 pages2303.00848v7excessmemNo ratings yet
- AlibiDocument25 pagesAlibiDiksha sandhuNo ratings yet
- h.265 Hevc Tutorial 2014 IscasDocument131 pagesh.265 Hevc Tutorial 2014 IscasDeepak123No ratings yet
- Efficient Iris Spoof Detection Via Boosted Local Binary PatternsDocument11 pagesEfficient Iris Spoof Detection Via Boosted Local Binary PatternshamintoriNo ratings yet
- Kim Generalized Video Deblurring 2015 CVPR PaperDocument9 pagesKim Generalized Video Deblurring 2015 CVPR PaperMuhammad Yusuf RidhoNo ratings yet
- MBOC Chi Square v06Document7 pagesMBOC Chi Square v06yaro82No ratings yet
- Image Compression With Different Types of Wavelets: Abstract: - Data Compression Which Can Be Lossy orDocument5 pagesImage Compression With Different Types of Wavelets: Abstract: - Data Compression Which Can Be Lossy orb756No ratings yet
- HW DVBDocument6 pagesHW DVBPrasetya AnggiNo ratings yet
- cv-3Document33 pagescv-3mnsurtisNo ratings yet
- Scaling Vision Transformers: Xiaohua Zhai, Alexander Kolesnikov, Neil Houlsby, Lucas BeyerDocument31 pagesScaling Vision Transformers: Xiaohua Zhai, Alexander Kolesnikov, Neil Houlsby, Lucas Beyerlinhaowei0389No ratings yet
- 1-1-1 面向人工智能统一神经架构和预训练方法Document51 pages1-1-1 面向人工智能统一神经架构和预训练方法landweelNo ratings yet
- 2015 - A Robust and Efficient Video Representation For Action Recognition (IMPROVED TRAJECTORIES)Document20 pages2015 - A Robust and Efficient Video Representation For Action Recognition (IMPROVED TRAJECTORIES)IoannisMademlisNo ratings yet
- Zhang 2020 J. Phys. Conf. Ser. 1678 012105Document10 pagesZhang 2020 J. Phys. Conf. Ser. 1678 012105gokularaman1996No ratings yet
- A Block-Based Inter-Band Lossless Hyperspectral Image CompressorDocument10 pagesA Block-Based Inter-Band Lossless Hyperspectral Image Compressorrnagu1969No ratings yet
- LETRIST Locally Encoded Transform Feature HistograDocument16 pagesLETRIST Locally Encoded Transform Feature HistograHARE KRISHNANo ratings yet
- ieee-nems-2007-zxdongDocument7 pagesieee-nems-2007-zxdongschoudsNo ratings yet
- SimplifyTransformerDocument27 pagesSimplifyTransformerdjaniNo ratings yet
- Robust Background Subtraction in HSV Color SpaceDocument8 pagesRobust Background Subtraction in HSV Color SpaceJuan OsorioNo ratings yet
- Nidhi S1Document4 pagesNidhi S1swapnil jainNo ratings yet
- Face Recognition System Based On LBPH AlgorithmDocument5 pagesFace Recognition System Based On LBPH AlgorithmIshika SharmaNo ratings yet
- Bachelor Thesis FHNW BeispielDocument5 pagesBachelor Thesis FHNW BeispielCarrie Romero100% (2)
- Battle of The Backbones - A Large-Scale Comparison of Pretrained Models Across Computer Vision TasksDocument29 pagesBattle of The Backbones - A Large-Scale Comparison of Pretrained Models Across Computer Vision TasksTungNo ratings yet
- PTCLab JACDocument17 pagesPTCLab JACSaurav BhattacharjeeNo ratings yet
- Optical Flow: Exploring Dynamic Visual Patterns in Computer VisionFrom EverandOptical Flow: Exploring Dynamic Visual Patterns in Computer VisionNo ratings yet
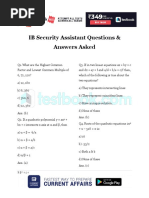
- Ib Security Assistant Questions Answers Asked Aaa03415Document19 pagesIb Security Assistant Questions Answers Asked Aaa03415Nitin DangiNo ratings yet
- Local Media243948736469186589Document45 pagesLocal Media243948736469186589EVA BUENAFENo ratings yet
- Linear First-Order ODE's: Classification of Differential EquationsDocument7 pagesLinear First-Order ODE's: Classification of Differential EquationsItumeleng PhoenixNo ratings yet
- Gasket, Gland Packing & ElastomersDocument12 pagesGasket, Gland Packing & ElastomersJaveed A. KhanNo ratings yet
- Diffusion of Solids in LiquidsDocument13 pagesDiffusion of Solids in LiquidsdhanapriyaNo ratings yet
- Mechanical Properties of Materials PDFDocument126 pagesMechanical Properties of Materials PDFNazario Emil LintagNo ratings yet
- Section 03 41 00 - Precast Concrete StairsDocument6 pagesSection 03 41 00 - Precast Concrete StairsChristine Joyce DayangNo ratings yet
- IS 2720 Part 4Document15 pagesIS 2720 Part 4bhustlero0oNo ratings yet
- Class Timetable IX BDocument1 pageClass Timetable IX BaayushpinjaniNo ratings yet
- Isoquants, Isocost Line and Producer's Equilibrium_083943Document10 pagesIsoquants, Isocost Line and Producer's Equilibrium_083943hluakk1430No ratings yet
- Overload 10032014 102949Document1 pageOverload 10032014 102949Arief TirtanaNo ratings yet
- Flame Detector: Ansi Device NumberDocument4 pagesFlame Detector: Ansi Device NumberIlham HendratamaNo ratings yet
- Pengaruh Komisaris, Komite Audit, Struktur Kepemilikan, Size Dan Leverage Terhadap Kinerja Keuangan Perusahaan Properti, Perumahan Dan Konstruksi 2013-2017Document16 pagesPengaruh Komisaris, Komite Audit, Struktur Kepemilikan, Size Dan Leverage Terhadap Kinerja Keuangan Perusahaan Properti, Perumahan Dan Konstruksi 2013-2017Nora AyuNo ratings yet
- 622 AssignmentDocument3 pages622 AssignmentlebogangNo ratings yet
- Why do people purchase from online travel agencies (OTAs)_ A consumption values perspectiveDocument11 pagesWhy do people purchase from online travel agencies (OTAs)_ A consumption values perspectiveAnkush DhimanNo ratings yet
- Verilog Design FlowDocument1 pageVerilog Design Flow2229029No ratings yet
- Station 1: Modeling Equations and Word ProblemsDocument7 pagesStation 1: Modeling Equations and Word ProblemsMajid KhanNo ratings yet
- Computer Studies PracticalDocument2 pagesComputer Studies PracticalMarkNo ratings yet
- Sheet 4Document2 pagesSheet 4Toka AliNo ratings yet
- Mass and Energy Balances Chapter 4.5Document24 pagesMass and Energy Balances Chapter 4.5Ferat BotNo ratings yet
- STRT-431 Reading Notes 10-5-21Document3 pagesSTRT-431 Reading Notes 10-5-21Drew JohnsonNo ratings yet
- PANGILINAN - Biostat MIDTERMDocument8 pagesPANGILINAN - Biostat MIDTERMMira Swan100% (2)
- Fix Cloned Arduino NANO CNC Shield - 10 Steps - InstructablesDocument11 pagesFix Cloned Arduino NANO CNC Shield - 10 Steps - InstructablesDushkoNo ratings yet
- Fabric Structure &designDocument25 pagesFabric Structure &designdewNo ratings yet
- Sia M6-8 MidtermDocument15 pagesSia M6-8 MidtermspiderrysNo ratings yet
- Combined SolutionDocument12 pagesCombined SolutionAbdullah NaseerNo ratings yet
- RCCHEMDocument10 pagesRCCHEMKartik PandeyNo ratings yet