Instruction Sets - Appendix B Operand Storage
Instruction Sets - Appendix B Operand Storage
Download as pdf or txt
You might also like
- 600 Watt, 3d-Printed, Halbach Array, Brushless Motor - ProjectsDocument13 pages600 Watt, 3d-Printed, Halbach Array, Brushless Motor - ProjectsGianlucaD'Andrea100% (1)
- Computer ArchitectureDocument667 pagesComputer Architecturevishalchaurasiya360001No ratings yet
- RISC V Intro For HackathonDocument40 pagesRISC V Intro For HackathonPavan Dhake100% (2)
- 3 Bit AdderDocument11 pages3 Bit AdderAvirup DasguptaNo ratings yet
- Ansaldo SM-6470B Coded Track CircuitDocument160 pagesAnsaldo SM-6470B Coded Track CircuitjmmfonsecaNo ratings yet
- Assembly LanguageDocument26 pagesAssembly LanguageECE N.V.Satyanarayana MurthyNo ratings yet
- Lecture 7: Instruction Set Architectures IV - Previously - TodayDocument12 pagesLecture 7: Instruction Set Architectures IV - Previously - TodayFazal JadoonNo ratings yet
- Risc Ppt Final v1Document98 pagesRisc Ppt Final v1Vaishnavi PanduranganNo ratings yet
- Instruction Set Architecture (ISA)Document41 pagesInstruction Set Architecture (ISA)StarqueenNo ratings yet
- Challenges & Implications For VLSI Architectures For Multimedia ProcessingDocument35 pagesChallenges & Implications For VLSI Architectures For Multimedia ProcessingVSNo ratings yet
- Lecture 4: Reduced Instruction Set Computers (RISC) and Assembly LanguageDocument39 pagesLecture 4: Reduced Instruction Set Computers (RISC) and Assembly Languagejamespong007No ratings yet
- SiFive - RISCV 101Document42 pagesSiFive - RISCV 101Iulian MocanuNo ratings yet
- Lec03 ISA PDFDocument9 pagesLec03 ISA PDFbadhri91No ratings yet
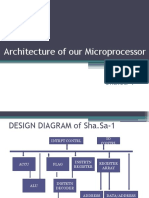
- Architecture of Sha - Sa-1 MicroprocessorDocument13 pagesArchitecture of Sha - Sa-1 MicroprocessorHeather HarrisNo ratings yet
- Lecture6-80x86 Assembly Programming IIDocument17 pagesLecture6-80x86 Assembly Programming IIsaminn2442No ratings yet
- 13 Assembly1Document57 pages13 Assembly1thenewcreation337No ratings yet
- Instruction Set Principles and ExamplesDocument77 pagesInstruction Set Principles and Examplesdayat_ridersNo ratings yet
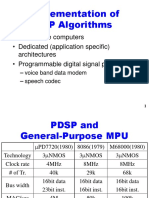
- Implementation of DSP AlgorithmsDocument20 pagesImplementation of DSP Algorithmss tharunNo ratings yet
- Lec7 - Os - PK - MemDocument41 pagesLec7 - Os - PK - MemPartha KuriNo ratings yet
- Lec7 - Os - PK - MemDocument41 pagesLec7 - Os - PK - MemPartha KuriNo ratings yet
- Lec7 - Os - PK - MemDocument41 pagesLec7 - Os - PK - MemPartha KuriNo ratings yet
- ISA 2 Regular SolutionDocument4 pagesISA 2 Regular SolutionmqtmqyNo ratings yet
- Ventana HotChips23 - FinalDocument16 pagesVentana HotChips23 - Finallshx9018No ratings yet
- HX1750 (MIL-STD-1750A Microprocessor)Document2 pagesHX1750 (MIL-STD-1750A Microprocessor)faradelectronicNo ratings yet
- CA04 2022S2 NewDocument33 pagesCA04 2022S2 NewPhạm Hiếu AhiiNo ratings yet
- KTMT HN - Ch05.assembly BasicsDocument21 pagesKTMT HN - Ch05.assembly BasicsNguyênNo ratings yet
- Operating Systems: Memory ManagementDocument32 pagesOperating Systems: Memory ManagementHIRAN KUMAR SINHANo ratings yet
- LLVM at Raincode LabsDocument28 pagesLLVM at Raincode LabsanibalNo ratings yet
- 1a.RISC-V ISA NomenclaturaDocument5 pages1a.RISC-V ISA Nomenclaturatantianyi.309No ratings yet
- ECE 152 Introduction To Computer Architecture Where We Are in This Course Right NowDocument12 pagesECE 152 Introduction To Computer Architecture Where We Are in This Course Right NowDaniel FsNo ratings yet
- ARM ProcessorDocument24 pagesARM ProcessorShreya AnushreeNo ratings yet
- Stored Program Concept InstructionsDocument7 pagesStored Program Concept InstructionsMahmood Ul HassanNo ratings yet
- X 86 AsmDocument18 pagesX 86 AsmAbdelouahid AlouaneNo ratings yet
- 2.2 DD2356 ThreadsDocument22 pages2.2 DD2356 ThreadsDaniel AraújoNo ratings yet
- Sctalk 2Document41 pagesSctalk 2Leandro YakoNo ratings yet
- AltivecPresentation 6upDocument3 pagesAltivecPresentation 6upnachiketakumar8882No ratings yet
- The Pros and Cons of Erasure Coding & Replication vs. RAID in Next-Gen Storage PlatformsDocument22 pagesThe Pros and Cons of Erasure Coding & Replication vs. RAID in Next-Gen Storage PlatformsharindramehtaNo ratings yet
- CA I - Chapter 2 ISA 2 RISC VDocument65 pagesCA I - Chapter 2 ISA 2 RISC VĐức MinhNo ratings yet
- ISA 2 Regular Solution-1Document4 pagesISA 2 Regular Solution-1mqtmqyNo ratings yet
- Operating Systems: Memory Management (Chapter 8: 8.1-8.6)Document48 pagesOperating Systems: Memory Management (Chapter 8: 8.1-8.6)Rachit SinghalNo ratings yet
- Lecture02 Memhier MM Yelick20Document68 pagesLecture02 Memhier MM Yelick20Maham SajjadNo ratings yet
- Computer Organization and Architecture Major Advances in ComputersDocument14 pagesComputer Organization and Architecture Major Advances in ComputersFehmi DenguirNo ratings yet
- Processors and Programmable Logic: Khaled Grati Grati - Khaled@Supcom - TN 2020-2021Document18 pagesProcessors and Programmable Logic: Khaled Grati Grati - Khaled@Supcom - TN 2020-2021ibrahimNo ratings yet
- Complex Instruction Set Computer (CISC)Document28 pagesComplex Instruction Set Computer (CISC)NS Engg&Tech EEE DEPTNo ratings yet
- Computer Architecture ISADocument32 pagesComputer Architecture ISA22021150No ratings yet
- Embeded Systems Unit 1Document73 pagesEmbeded Systems Unit 1ashwinigundale2003No ratings yet
- Su L17 Processor DatapathDocument33 pagesSu L17 Processor DatapathindramanokaranNo ratings yet
- Ca 12Document64 pagesCa 12SXNo ratings yet
- Sap - 2Document135 pagesSap - 2Muh Nur FaiziNo ratings yet
- Optimization Techniques Code OptimizationsDocument10 pagesOptimization Techniques Code OptimizationsVishal SainiNo ratings yet
- Lab 2Document59 pagesLab 2J JAYDONNo ratings yet
- Lecture1 2Document21 pagesLecture1 2da_oakNo ratings yet
- Week 4 - Lecture 4 - MIPS ISADocument38 pagesWeek 4 - Lecture 4 - MIPS ISAkhoản 1 tàiNo ratings yet
- EE209A - 24 14 Assembly1Document40 pagesEE209A - 24 14 Assembly1김문엽No ratings yet
- Chapter 7Document25 pagesChapter 7fenty4105No ratings yet
- ARM Arch2Document20 pagesARM Arch2anyela aquino velasquezNo ratings yet
- Hydrabad PPT PDFDocument164 pagesHydrabad PPT PDFDSDNo ratings yet
- L06 - RISCV Datapath DesignDocument78 pagesL06 - RISCV Datapath DesignMishkaat100% (1)
- 2 Instruction Formats StudyDocument39 pages2 Instruction Formats StudyRohan TiwariNo ratings yet
- Emulation Technique: Why Do We Talk About Emulation ?Document21 pagesEmulation Technique: Why Do We Talk About Emulation ?Malik UsamaNo ratings yet
- 2 - Programmer View of Computer and Instruction CycleDocument45 pages2 - Programmer View of Computer and Instruction CycleHammad UllahNo ratings yet
- "Unleashing the Power of Assembly Language: Mastering the World's Most Efficient Code"From Everand"Unleashing the Power of Assembly Language: Mastering the World's Most Efficient Code"No ratings yet
- Relational Database Index Design and the Optimizers: DB2, Oracle, SQL Server, et al.From EverandRelational Database Index Design and the Optimizers: DB2, Oracle, SQL Server, et al.Rating: 5 out of 5 stars5/5 (1)
- Stock-LedMax - XLSX 0Document96 pagesStock-LedMax - XLSX 0Emidio CostaNo ratings yet
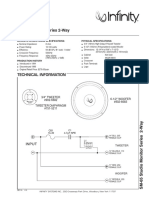
- Infiniti cm65Document1 pageInfiniti cm65Juan Carlos Miró Penalba100% (1)
- Session Experts: RegistrationDocument2 pagesSession Experts: RegistrationsahadevNo ratings yet
- Transistor Headphone Amplifier Audio CircuitDocument2 pagesTransistor Headphone Amplifier Audio CircuitPaulo Henrique Mareze100% (1)
- Ee Terms-ObjectivesDocument28 pagesEe Terms-ObjectivesZendrick MaltoNo ratings yet
- Snellen Chart Based On Android Control: Annisa Novantina Eka Fitria, Priyambada Cahya Nugraha, LamidiDocument7 pagesSnellen Chart Based On Android Control: Annisa Novantina Eka Fitria, Priyambada Cahya Nugraha, LamidiqurroNo ratings yet
- Filter DesignDocument15 pagesFilter DesigngeokaragNo ratings yet
- Brake - Control - 2 TKEDocument26 pagesBrake - Control - 2 TKETecwyn WebsterNo ratings yet
- Semester-IV EC401 Analog Communication 3L:0T:0P 3 CreditsDocument15 pagesSemester-IV EC401 Analog Communication 3L:0T:0P 3 CreditsChayan KoleyNo ratings yet
- Keytek Ce Master System UsersDocument108 pagesKeytek Ce Master System UsersSteven J BaynesNo ratings yet
- Multipurpose Smart Glove A Personal Assistant For Differently AbledDocument61 pagesMultipurpose Smart Glove A Personal Assistant For Differently AbledTanyaGargNo ratings yet
- RF Class C Power Amp Apt9501Document13 pagesRF Class C Power Amp Apt9501Ashvini VishvakarmaNo ratings yet
- Arduino Measurement Projects For BeginnersDocument175 pagesArduino Measurement Projects For BeginnersSimon Choquechambi Martinez100% (4)
- Computer StudyDocument45 pagesComputer StudyOlushola AdebisiNo ratings yet
- Nebu Skariah Koshy RESUME FINAL 2Document4 pagesNebu Skariah Koshy RESUME FINAL 2Nischal AnandNo ratings yet
- GP SeriesDocument6 pagesGP SeriesLanlan AmalanhasNo ratings yet
- Cross-Correlation and Auto - CorrelationDocument6 pagesCross-Correlation and Auto - CorrelationSowmya AnanthaNo ratings yet
- Manual UltrapipeDocument10 pagesManual UltrapipevalentinNo ratings yet
- DX DiagDocument27 pagesDX DiagGeorge GarciaNo ratings yet
- MT6582 Android ScatterDocument5 pagesMT6582 Android ScatterSharad PandeyNo ratings yet
- Note Book Laptops: 1. HP 15 - Intel CeleronDocument3 pagesNote Book Laptops: 1. HP 15 - Intel CeleronejoghenetaNo ratings yet
- GTP (66 20 6.6KV)Document99 pagesGTP (66 20 6.6KV)ms_kazmi100% (1)
- Matrix Vision System Manual enDocument235 pagesMatrix Vision System Manual enmedeepikaNo ratings yet
- 8080 Manual IntelDocument222 pages8080 Manual IntelM N GeethasreeNo ratings yet
- f2114 Gprs Ip Modem Technical SpecificationDocument4 pagesf2114 Gprs Ip Modem Technical SpecificationmandyfourfaithNo ratings yet
- Up QuizDocument2 pagesUp QuizJayesh NarayanNo ratings yet
- Vocational Report Bharat WagonDocument15 pagesVocational Report Bharat WagonRajdeep SikdarNo ratings yet