The Art of LEGO Design: Fred G. Martin March 15, 1995
The Art of LEGO Design: Fred G. Martin March 15, 1995
Download as pdf or txt
You might also like
- Service Manual: Models Mercury/Mariner 40 45 50 50 Bigfoot (4-Stroke)Document599 pagesService Manual: Models Mercury/Mariner 40 45 50 50 Bigfoot (4-Stroke)Carsten LarsenNo ratings yet
- Comparison Between Different Commercial Gear Tooth Contact Analysis Software PackagesDocument16 pagesComparison Between Different Commercial Gear Tooth Contact Analysis Software PackagesAbhijeet DeshmukhNo ratings yet
- Stability & Determinacy of TrussesDocument5 pagesStability & Determinacy of TrussesJames CENo ratings yet
- 4319B - Flank Modifications in Bevel Gears Using A UMCDocument22 pages4319B - Flank Modifications in Bevel Gears Using A UMCRaul PerezNo ratings yet
- LEGO Boost Pipe Cleaner Bending RobotDocument14 pagesLEGO Boost Pipe Cleaner Bending Robotazat.mukhamadeev84No ratings yet
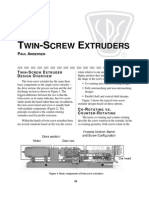
- Paul AndersenDocument24 pagesPaul AndersenAli Nurrakhmad Siregar100% (1)
- 3 TYPES OF GEARS & Gear TrainsDocument17 pages3 TYPES OF GEARS & Gear TrainsabinmwangiNo ratings yet
- Dobby SheddingDocument3 pagesDobby SheddingLondon StNo ratings yet
- LEGO Building Tips and Tricks: LEGO Building Tips and TricksDocument6 pagesLEGO Building Tips and Tricks: LEGO Building Tips and TricksJesus CarpioNo ratings yet
- LEGO Building Tips and Tricks: LEGO Building Tips and TricksDocument6 pagesLEGO Building Tips and Tricks: LEGO Building Tips and TricksP. GuadamuzNo ratings yet
- Tech Sec 8Document6 pagesTech Sec 8Nabende UmarNo ratings yet
- Cross ChainingDocument20 pagesCross ChainingRohanNo ratings yet
- Lotus Academy: Functions of The Draw FrameDocument10 pagesLotus Academy: Functions of The Draw FrameomiNo ratings yet
- Axles / Beams / Tires Cross Axles: Picture Name UsageDocument8 pagesAxles / Beams / Tires Cross Axles: Picture Name UsageNazri IsmailNo ratings yet
- Activity 1.1.3 Gears - VEX: N 2 GR G R N 1Document6 pagesActivity 1.1.3 Gears - VEX: N 2 GR G R N 1Nate FrieslNo ratings yet
- Gear Train (Session 2022)Document47 pagesGear Train (Session 2022)munizahqNo ratings yet
- Gears-Force Transmission and Gear Train-PaperDocument19 pagesGears-Force Transmission and Gear Train-Paperakshay_pundeNo ratings yet
- Bevel Gear CalcsDocument11 pagesBevel Gear Calcsmanish_umdNo ratings yet
- For The Gear-Like Device Used To Drive A Roller Chain, See - This Article Is About Mechanical Gears. For Other Uses, SeeDocument25 pagesFor The Gear-Like Device Used To Drive A Roller Chain, See - This Article Is About Mechanical Gears. For Other Uses, SeeNasir HadranNo ratings yet
- 1.1.3.a.vex - Ak GearsDocument6 pages1.1.3.a.vex - Ak GearsNaigel BennettNo ratings yet
- CH 01 OddslnsDocument2 pagesCH 01 OddslnsPhạm Minh KhuêNo ratings yet
- Turkred Globoid WormgearingDocument3 pagesTurkred Globoid Wormgearingnagaraj.ss@quest-global.comNo ratings yet
- Section 8 Bevel GearingDocument5 pagesSection 8 Bevel GearingLiniel de JesusNo ratings yet
- Internal Ring Gears Design and ConsiderationsDocument3 pagesInternal Ring Gears Design and ConsiderationsRZW RNo ratings yet
- Finding Gear Ratio Student PagesDocument9 pagesFinding Gear Ratio Student PagesM Jobayer AzadNo ratings yet
- Ch1 Gear TrainsDocument79 pagesCh1 Gear Trainsخالد المالكيNo ratings yet
- CourveDocument24 pagesCourveNeeraj SharmaNo ratings yet
- Project Report On Compound Gear TrainDocument22 pagesProject Report On Compound Gear Trainsourabh singh tomer71% (7)
- Mechanical Power Transmission Fundamentals-R1Document33 pagesMechanical Power Transmission Fundamentals-R1V SquareNo ratings yet
- GeartrainsDocument19 pagesGeartrainsGgogpl YyoggshNo ratings yet
- Stability & Determinacy of Trusses PDFDocument5 pagesStability & Determinacy of Trusses PDFuwj123No ratings yet
- Chapter 9 Gear TrainsDocument99 pagesChapter 9 Gear TrainsAmalina100% (1)
- JETIRFX06156Document5 pagesJETIRFX06156deepsidpara88No ratings yet
- Origami - GearwheelDocument1 pageOrigami - Gearwheelapi-3709851No ratings yet
- Chapter - 1Document34 pagesChapter - 1Yuva RajNo ratings yet
- Gear Train PDFDocument10 pagesGear Train PDFABHIJITNo ratings yet
- Chapter 3 Gears and Gear Trains 19 PDFDocument37 pagesChapter 3 Gears and Gear Trains 19 PDFMITTAPALLI PAVAN KUMAR REDDY100% (1)
- Bounds On Rubik's Cube and Mirror Cube Configurations: Grace Hsu, Sissi LiuDocument22 pagesBounds On Rubik's Cube and Mirror Cube Configurations: Grace Hsu, Sissi LiuAldrin RegalaNo ratings yet
- Numerical Modelling of Rubber Vibration Isolators: BaqusDocument8 pagesNumerical Modelling of Rubber Vibration Isolators: BaqussabihaNo ratings yet
- Robo-Sloth: A Rope-Climbing RobotDocument10 pagesRobo-Sloth: A Rope-Climbing RobotmatitotbuNo ratings yet
- Problem 4.1: Three Dimensional MazesDocument2 pagesProblem 4.1: Three Dimensional MazesJoe BergeronNo ratings yet
- Chapter 09 Solutions-MergedDocument20 pagesChapter 09 Solutions-MergedNguyễn Đức TuấnNo ratings yet
- Ring internal pumpDocument3 pagesRing internal pumpRaghad AsNo ratings yet
- KOM Unit 6 - (Revised)Document70 pagesKOM Unit 6 - (Revised)a c s KumarNo ratings yet
- Simple Machines Wheel and AxleDocument12 pagesSimple Machines Wheel and Axleobiuju048No ratings yet
- SP 12Document194 pagesSP 12papuca papucaNo ratings yet
- Universidad Autónoma de Querétaro.: Facultad de Ingeniería. Ingeniería ElectromecánicaDocument16 pagesUniversidad Autónoma de Querétaro.: Facultad de Ingeniería. Ingeniería ElectromecánicaSalvador Vega MancillaNo ratings yet
- Noncircular GearsDocument6 pagesNoncircular GearsRăzvan NicolaeNo ratings yet
- MAE 211 MechatronicsDocument74 pagesMAE 211 Mechatronicsapi-27637095100% (1)
- SBE SS5 SecureDocument131 pagesSBE SS5 SecureSergio ValeNo ratings yet
- Retop - Cheat Sheet HacksDocument23 pagesRetop - Cheat Sheet HacksMelissaBonfim MelbonfimNo ratings yet
- MoM ManualDocument79 pagesMoM ManualHamid CheemaNo ratings yet
- 2 TYPES OF GEARSDocument10 pages2 TYPES OF GEARSsilasally272No ratings yet
- Diseño de Cimentaciones en Suelos No Susceptibles A HumedecerseDocument2 pagesDiseño de Cimentaciones en Suelos No Susceptibles A HumedecerseAdriCastro90No ratings yet
- CHP 3 Power Transmission GEARSDocument18 pagesCHP 3 Power Transmission GEARSabinmwangiNo ratings yet
- 19FTM05. Design of A Double Spiral Bevel Gearset: ISBN: 978-1-64353-044-4Document1 page19FTM05. Design of A Double Spiral Bevel Gearset: ISBN: 978-1-64353-044-4gioNo ratings yet
- Self-Assembling Systems: Theory and SimulationFrom EverandSelf-Assembling Systems: Theory and SimulationLi-Tang YanNo ratings yet
- Planar Linkage Synthesis: A modern CAD based approachFrom EverandPlanar Linkage Synthesis: A modern CAD based approachNo ratings yet
- An Illustrated Guide to Making Mobile Toys - Scooter, Tricycle, Two Utility Carts and Wooden Land RoverFrom EverandAn Illustrated Guide to Making Mobile Toys - Scooter, Tricycle, Two Utility Carts and Wooden Land RoverNo ratings yet
- Hazardous Locations Cec ClassificationsDocument4 pagesHazardous Locations Cec ClassificationsFernandoCrespoMonNo ratings yet
- 1591861190-ABB New+generation+ATS+solutionsDocument29 pages1591861190-ABB New+generation+ATS+solutionsFernandoCrespoMonNo ratings yet
- Scanned From Padre Xerox Multifunction PrinterDocument3 pagesScanned From Padre Xerox Multifunction PrinterFernandoCrespoMonNo ratings yet
- Schneider Electric - PowerPacT-PFrame-Molded-Case-Circuit-Breakers - S29450Document3 pagesSchneider Electric - PowerPacT-PFrame-Molded-Case-Circuit-Breakers - S29450FernandoCrespoMonNo ratings yet
- AISIKAI-SKT Series Automatic Transfer Switch Catalogue2022V1.0Document17 pagesAISIKAI-SKT Series Automatic Transfer Switch Catalogue2022V1.0FernandoCrespoMonNo ratings yet
- C Form 02Document72 pagesC Form 02FernandoCrespoMonNo ratings yet
- DOE - Motor - and - Drive - Assessment - Leads - To - Energy - Savings - For - Power - Drive - SystemsDocument8 pagesDOE - Motor - and - Drive - Assessment - Leads - To - Energy - Savings - For - Power - Drive - SystemsFernandoCrespoMonNo ratings yet
- Operator's Manual: Nirvana Cycling Refrigerated DryerDocument50 pagesOperator's Manual: Nirvana Cycling Refrigerated DryerFernandoCrespoMonNo ratings yet
- Layers of Protection AnalysisDocument8 pagesLayers of Protection AnalysisFernandoCrespoMonNo ratings yet
- 4 Types of Motor Enclosures TMEIC - Reprint - 0621Document3 pages4 Types of Motor Enclosures TMEIC - Reprint - 0621FernandoCrespoMonNo ratings yet
- Taking Medium-Voltage Motor Control Centers To New Levels of SafetyDocument10 pagesTaking Medium-Voltage Motor Control Centers To New Levels of SafetyFernandoCrespoMonNo ratings yet
- Iec 60243-1-2013Document58 pagesIec 60243-1-2013FernandoCrespoMon100% (1)
- Good - Preparation - Electrical - SafetyDocument1 pageGood - Preparation - Electrical - SafetyFernandoCrespoMonNo ratings yet
- Ice 2005Document62 pagesIce 2005FernandoCrespoMonNo ratings yet
- Notice 1 PageDocument2 pagesNotice 1 PageFernandoCrespoMonNo ratings yet
- DM 6XXX Register MapDocument5 pagesDM 6XXX Register MapFernandoCrespoMonNo ratings yet
- 051109556894Document16 pages051109556894FernandoCrespoMonNo ratings yet
- GFCI Fact SheetDocument3 pagesGFCI Fact SheetFernandoCrespoMonNo ratings yet
- D3 D4 Unidades Evaporadoras DanfossDocument36 pagesD3 D4 Unidades Evaporadoras DanfossFernandoCrespoMonNo ratings yet
- How To Weigh - CAT ScaleDocument4 pagesHow To Weigh - CAT ScaleFernandoCrespoMonNo ratings yet
- Spear - Long Range 1080p 2MP 60 FPS License Plate Recognition (LPR) CameraDocument4 pagesSpear - Long Range 1080p 2MP 60 FPS License Plate Recognition (LPR) CameraFernandoCrespoMonNo ratings yet
- POM301W SpecificationsDocument3 pagesPOM301W SpecificationsFernandoCrespoMonNo ratings yet
- SR-SB1029-5C InstructionDocument2 pagesSR-SB1029-5C InstructionFernandoCrespoMonNo ratings yet
- D5-2 Prepainted Galvanized Galvalume Steel Coils With Protective Plastic FilmDocument2 pagesD5-2 Prepainted Galvanized Galvalume Steel Coils With Protective Plastic FilmFernandoCrespoMonNo ratings yet
- Algorithm To Calculate Western - Catholic Easter Date. (#1180480) - DrupalDocument2 pagesAlgorithm To Calculate Western - Catholic Easter Date. (#1180480) - DrupalFernandoCrespoMonNo ratings yet
- Modicon TSX Nano PLC: The Big Solution in A Small PackageDocument11 pagesModicon TSX Nano PLC: The Big Solution in A Small PackageFernandoCrespoMonNo ratings yet
- Setting Up Meross Smart Wifi Adapter For Regular Garage Door Opener Unit (Adds Voice and Smartphone Control)Document22 pagesSetting Up Meross Smart Wifi Adapter For Regular Garage Door Opener Unit (Adds Voice and Smartphone Control)FernandoCrespoMonNo ratings yet
- Nano PLCS: Selection GuideDocument34 pagesNano PLCS: Selection GuideFernandoCrespoMonNo ratings yet
- Tom MCQ VISemDocument5 pagesTom MCQ VISempurukumar32250% (2)
- Gear Types: - Cylindrical GearsDocument44 pagesGear Types: - Cylindrical Gearsmadream7100% (1)
- MTD Imperial136 638 03647 204 05Document39 pagesMTD Imperial136 638 03647 204 05DbirdManARNo ratings yet
- Power Transmission MethodsDocument23 pagesPower Transmission MethodsSachin Chaturvedi100% (4)
- 1.6 Features of Common Gears: Helical GearDocument8 pages1.6 Features of Common Gears: Helical Gearcmm5477No ratings yet
- Gear Hand BookDocument104 pagesGear Hand BookOddysseus5100% (7)
- VRM Drive Unit Ver FJC 2010Document60 pagesVRM Drive Unit Ver FJC 2010Mujahid Baloch100% (1)
- Vertical Axis Wind Turbine Literature ReviewDocument8 pagesVertical Axis Wind Turbine Literature Reviewj1zijefifin3100% (1)
- Notes BME 5 &6Document22 pagesNotes BME 5 &6eldhosekjnitNo ratings yet
- Section 2Document18 pagesSection 2Dhananjay SargarNo ratings yet
- Instructional Material (Manual) : HMM, More ComplicatedDocument32 pagesInstructional Material (Manual) : HMM, More ComplicatedJerald LatorreNo ratings yet
- Gearboxes: Motion Design GuideDocument26 pagesGearboxes: Motion Design GuideMohana Rao VabbilireddiNo ratings yet
- EoT Study MaterialsDocument24 pagesEoT Study Materialsishika SHANDILYANo ratings yet
- Gears Engineering InformationDocument138 pagesGears Engineering InformationoperationmanagerNo ratings yet
- Us 5492401Document10 pagesUs 5492401daygo21No ratings yet
- SKF Industrial Gearbox 2Document78 pagesSKF Industrial Gearbox 2dk_2k2002100% (2)
- Group 3 Disassembly and AssemblyDocument5 pagesGroup 3 Disassembly and AssemblyAndré TarginoNo ratings yet
- Design of Transmission Systems Question BankDocument27 pagesDesign of Transmission Systems Question BankbalajimetturNo ratings yet
- A. Simón, Fundamentos de Teoría de Máquinas y MecanismosDocument415 pagesA. Simón, Fundamentos de Teoría de Máquinas y MecanismosMarta BenitoNo ratings yet
- Transmission 3 D Users ManualDocument318 pagesTransmission 3 D Users ManualWilliam WadesNo ratings yet
- SAE Gear Design Course - C0223 - th003Document194 pagesSAE Gear Design Course - C0223 - th003mirekjanda100% (6)
- GCU Gear Assembly KitDocument1 pageGCU Gear Assembly KitNagy ChristianNo ratings yet
- Handbook of Metric Drive ComponentsDocument228 pagesHandbook of Metric Drive ComponentsbubickaNo ratings yet
- ANNA UNIVERSITY Dts Two MarkDocument7 pagesANNA UNIVERSITY Dts Two MarkkarthisanNo ratings yet
- Machine Elements NotesDocument97 pagesMachine Elements Notessharneybasiga2No ratings yet
- Helical Cooling B ABM Install Maint PDFDocument17 pagesHelical Cooling B ABM Install Maint PDFAvinash GamitNo ratings yet
- 3 Gear DrivesDocument19 pages3 Gear Drivessarprajkatre143No ratings yet
- Solar Pesticide Sprayer: Krishna Murthy B Rajan Kanwar Indrajeet Yadav, Vishnu DasDocument8 pagesSolar Pesticide Sprayer: Krishna Murthy B Rajan Kanwar Indrajeet Yadav, Vishnu DasNishithNo ratings yet