MIPS Report File
MIPS Report File
Download as docx, pdf, or txt
You might also like
- Rolan RD 700 Service ManualDocument34 pagesRolan RD 700 Service ManualAgung Supadma100% (1)
- Acid Base Tutorial - University of ConnecticutDocument47 pagesAcid Base Tutorial - University of ConnecticutClaudioGutierrezFrausto83% (6)
- CA 2mark and 16 Mark With AnswerDocument112 pagesCA 2mark and 16 Mark With AnswerOmprakash DNo ratings yet
- Q # 1 What Is Machine Cycle in Computer and How It Works?Document4 pagesQ # 1 What Is Machine Cycle in Computer and How It Works?Coding Expert100% (1)
- MP Assignment 1Document9 pagesMP Assignment 1Fatima SheikhNo ratings yet
- Respiratory SystemDocument32 pagesRespiratory Systemapi-202513022No ratings yet
- Statistics Booklet For NEW A Level AQADocument66 pagesStatistics Booklet For NEW A Level AQAMurk NiazNo ratings yet
- BIT SINDRI, CSE SyllabusDocument36 pagesBIT SINDRI, CSE SyllabusNikhil Surya Mukhi100% (1)
- OLP NotesDocument11 pagesOLP NotesSathish NarayananNo ratings yet
- Ec 6009 - Advanced Computer Architecture 2 MarksDocument8 pagesEc 6009 - Advanced Computer Architecture 2 MarksNS Engg&Tech EEE DEPTNo ratings yet
- Computer Architecture Unit V - Advanced Architecture Part-ADocument4 pagesComputer Architecture Unit V - Advanced Architecture Part-AJennifer PeterNo ratings yet
- CA Classes-106-110Document5 pagesCA Classes-106-110SrinivasaRaoNo ratings yet
- Ambo University Waliso Campus: Dep:-Information Technology Group 8 It2 YearDocument10 pagesAmbo University Waliso Campus: Dep:-Information Technology Group 8 It2 YearChala GetaNo ratings yet
- Unit 2Document7 pagesUnit 2sikesag308No ratings yet
- Design of 32-Bit Risc Cpu Based On Mips: Journal of Global Research in Computer ScienceDocument5 pagesDesign of 32-Bit Risc Cpu Based On Mips: Journal of Global Research in Computer ScienceAkanksha Dixit ManodhyaNo ratings yet
- Computer Organization - Hardwired V/s Micro-Programmed Control UnitDocument9 pagesComputer Organization - Hardwired V/s Micro-Programmed Control UnitChala GetaNo ratings yet
- Unit Reduced Instruction Set Computer Architecture: Structure NoDocument17 pagesUnit Reduced Instruction Set Computer Architecture: Structure NoShubh YadavNo ratings yet
- Concept of Pipelining - Computer Architecture Tutorial What Is Pipelining?Document5 pagesConcept of Pipelining - Computer Architecture Tutorial What Is Pipelining?Ayush Kumar100% (1)
- Computer Hardware Lecturer - 4Document9 pagesComputer Hardware Lecturer - 4RC SharmaNo ratings yet
- Aca Univ 2 Mark and 16 MarkDocument20 pagesAca Univ 2 Mark and 16 MarkmenakadevieceNo ratings yet
- Aca 2 Marks With AnswersDocument22 pagesAca 2 Marks With AnswersmenakadevieceNo ratings yet
- COA AnswersDocument5 pagesCOA Answersgurly101No ratings yet
- CA Classes-241-245Document5 pagesCA Classes-241-245SrinivasaRaoNo ratings yet
- CPU Structure and FunctionsDocument39 pagesCPU Structure and FunctionsNICE ONENo ratings yet
- Concept of Pipelining 3.1.3Document6 pagesConcept of Pipelining 3.1.3fovov27364No ratings yet
- CA Classes-76-80Document5 pagesCA Classes-76-80SrinivasaRaoNo ratings yet
- RISC MicroprocessorsDocument63 pagesRISC MicroprocessorsBoul chandra GaraiNo ratings yet
- B Kidus Moti Naol Gulet&Michael Operation FINALDocument16 pagesB Kidus Moti Naol Gulet&Michael Operation FINALNathnael MesfinNo ratings yet
- Computer System Organizations: Ms - Chit Su MonDocument74 pagesComputer System Organizations: Ms - Chit Su MonAjharuddin AnsariNo ratings yet
- CS2253 - Computerorganization Architecture-QbDocument54 pagesCS2253 - Computerorganization Architecture-QbVaishnavi RaveNo ratings yet
- Computer System Organization: ProcessorsDocument21 pagesComputer System Organization: Processorsfahadwahid550No ratings yet
- CUDA - Introduction CUDA - IntroductionDocument3 pagesCUDA - Introduction CUDA - Introductionolia.92No ratings yet
- RISC Instruction Set:: I) Data Manipulation InstructionsDocument8 pagesRISC Instruction Set:: I) Data Manipulation InstructionsSwarup BharNo ratings yet
- EC8552 Computer Architecture and Organization 2 MDocument23 pagesEC8552 Computer Architecture and Organization 2 MKeshvan DhanapalNo ratings yet
- Unit 5Document23 pagesUnit 5rengoku.slvzNo ratings yet
- Pipelining 2Document16 pagesPipelining 2Kumar GagneshNo ratings yet
- Ee/Ce 6370 Spring 2015: Design Assignment: Utd Pipelined MicroprocessorDocument7 pagesEe/Ce 6370 Spring 2015: Design Assignment: Utd Pipelined MicroprocessorRohit YedidaNo ratings yet
- Analysis and Programming of Kernel For Embedded SystemsDocument13 pagesAnalysis and Programming of Kernel For Embedded SystemsthatshowlifeworksNo ratings yet
- ACA Question BankDocument19 pagesACA Question BankVanitha VivekNo ratings yet
- Cao U2Document11 pagesCao U2vilasvairagade02No ratings yet
- Unit 6 - Pipeline, Vector Processing and MultiprocessorsDocument23 pagesUnit 6 - Pipeline, Vector Processing and MultiprocessorsPiyush KoiralaNo ratings yet
- Continuation 4TH Unit DpacoDocument18 pagesContinuation 4TH Unit DpacoSANJAY KASI VISVANATHANNo ratings yet
- 1st Year Chapter 3Document11 pages1st Year Chapter 3Sulphuric AcidNo ratings yet
- # Tutorial 9 & 10Document6 pages# Tutorial 9 & 10aojiru.coNo ratings yet
- Unit 3 - The ProcessorDocument4 pagesUnit 3 - The ProcessorAndreea CraescuNo ratings yet
- COA Unit-2 Notes (P3)Document13 pagesCOA Unit-2 Notes (P3)Sayan ChakrabortyNo ratings yet
- Ambo University Waliso Campus: Dep:-Information TechnologyDocument9 pagesAmbo University Waliso Campus: Dep:-Information TechnologyChala GetaNo ratings yet
- FinalDocument26 pagesFinalHứa Đăng KhoaNo ratings yet
- Unit 5 (Coa) NotesDocument35 pagesUnit 5 (Coa) NotesmudiyalaruchithaNo ratings yet
- Module 4 Ktunotes - in MinDocument11 pagesModule 4 Ktunotes - in MinJamieNo ratings yet
- COA Chapter 6Document6 pagesCOA Chapter 6Abebe GosuNo ratings yet
- 3 RdunitcsoDocument38 pages3 RdunitcsoGourav DubeyNo ratings yet
- CO Pipelining PDF notesDocument10 pagesCO Pipelining PDF notesMy NotesNo ratings yet
- Term Paper Title: Bachelor of Technology Computer Science and EngineeringDocument10 pagesTerm Paper Title: Bachelor of Technology Computer Science and EngineeringAqUa ForTisNo ratings yet
- 4 - Performance IssuesDocument48 pages4 - Performance IssueshakumbiladNo ratings yet
- WINSEM2022-23 CSE4001 ETH VL2022230504003 Reference Material I 05-01-2023 M-2 2ILPDocument42 pagesWINSEM2022-23 CSE4001 ETH VL2022230504003 Reference Material I 05-01-2023 M-2 2ILPnehaNo ratings yet
- Pentium 4 Pipe LiningDocument7 pagesPentium 4 Pipe Liningapi-3801329100% (5)
- Computer Architecture 16 MarksDocument28 pagesComputer Architecture 16 MarksBalachandar2000100% (1)
- Computer Organization: Virtual MemoryDocument26 pagesComputer Organization: Virtual Memorychuks felix michaelNo ratings yet
- Tutorial 2: CC118 Computer Organisation and ArchitectureDocument3 pagesTutorial 2: CC118 Computer Organisation and Architecturesajan gcNo ratings yet
- UNIT 5 RISC ArchitectureDocument16 pagesUNIT 5 RISC ArchitectureKESSAVAN.M ECE20No ratings yet
- Types of Operating System SchedulersDocument26 pagesTypes of Operating System SchedulersVa SuNo ratings yet
- Programming Your GPU with OpenMP: Performance Portability for GPUsFrom EverandProgramming Your GPU with OpenMP: Performance Portability for GPUsNo ratings yet
- PrinciplesofTransformerDesign PDFDocument236 pagesPrinciplesofTransformerDesign PDFelhaffarNo ratings yet
- Indian RMO 2000-11, CRMO 2012-18 With SolutionsDocument135 pagesIndian RMO 2000-11, CRMO 2012-18 With SolutionsMuhammad Abdullah KhanNo ratings yet
- Master Ecs Engineering of Complex Systems: (2019-2020) (The Programme Is Offered in English)Document7 pagesMaster Ecs Engineering of Complex Systems: (2019-2020) (The Programme Is Offered in English)AGA TAHANo ratings yet
- SyslogDocument8 pagesSyslogMaicon GameplayNo ratings yet
- H02152Document1 pageH02152Javier Lora BarbaNo ratings yet
- E7 - Ch02 - The Photoelectric Effect - FS - eDocument15 pagesE7 - Ch02 - The Photoelectric Effect - FS - eKenny LauNo ratings yet
- Dividend Policy Analysis For Sun PharmaceuticalsDocument16 pagesDividend Policy Analysis For Sun PharmaceuticalsIshita SoodNo ratings yet
- Javier Paper Enmap Eartharxiv Update 1Document13 pagesJavier Paper Enmap Eartharxiv Update 1acmora.cloudyNo ratings yet
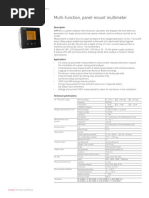
- Circutor CVM c4 MultimeterDocument2 pagesCircutor CVM c4 MultimeterMUHAMMAD USMANNo ratings yet
- Fact Sheet DPR2900 Rectifier PDFDocument2 pagesFact Sheet DPR2900 Rectifier PDFsam50% (2)
- Safecomp MISRA CS FinalDocument12 pagesSafecomp MISRA CS FinalCom DigfulNo ratings yet
- RAJ SoniDocument40 pagesRAJ SoniPATEL POOJANNo ratings yet
- 01-Flame Detection Paper - GPDocument6 pages01-Flame Detection Paper - GPHJNo ratings yet
- Optical Fiber Communications SyllabusDocument2 pagesOptical Fiber Communications SyllabusKrishna Prasad PheluNo ratings yet
- Common Expressions With Do and MakeDocument7 pagesCommon Expressions With Do and MakeLuis S. LopezNo ratings yet
- Chapter 6 STEELDocument20 pagesChapter 6 STEELhannah cedNo ratings yet
- Wi ViDocument15 pagesWi VinusrathshakeerNo ratings yet
- CRSP Guide Oct16Document11 pagesCRSP Guide Oct16Johnny LolNo ratings yet
- Data Processing CycleDocument12 pagesData Processing CycleAkash KumarNo ratings yet
- R2RDocument2 pagesR2Rrangga.priambudiNo ratings yet
- Installing Virl On Vmware Esxi 5Document12 pagesInstalling Virl On Vmware Esxi 5baraboljaNo ratings yet
- and 431 2080 Gates 2019 Hydraulic Catalog enDocument769 pagesand 431 2080 Gates 2019 Hydraulic Catalog enDiego AvendañoNo ratings yet
- Earthquakes and Earthquake-Resistant Design of Structures: Dr. R.S. JangidDocument94 pagesEarthquakes and Earthquake-Resistant Design of Structures: Dr. R.S. JangidFrans N PandjaitanNo ratings yet
- Assignment No 1: Department of Mechanical EngineeringDocument8 pagesAssignment No 1: Department of Mechanical EngineeringAnonymous a5FjVJQcXNo ratings yet
- Benq - MH534Document1 pageBenq - MH534Diogo RodasNo ratings yet