MA20010: Vector Calculus and Partial Differential Equations
MA20010: Vector Calculus and Partial Differential Equations
Download as pdf or txt
You might also like
- ENG2005 Lecture BookDocument230 pagesENG2005 Lecture Bookأزيان زكرياNo ratings yet
- MA250 - Intro To PDEsDocument16 pagesMA250 - Intro To PDEsRebecca RumseyNo ratings yet
- Apache CouchDB Unauthenticated Administrative Access (CVE-2017-12635)Document18 pagesApache CouchDB Unauthenticated Administrative Access (CVE-2017-12635)RefawNo ratings yet
- Web Classplusapp Com ViewPdfDocument1 pageWeb Classplusapp Com ViewPdfSoumyajit BagchiNo ratings yet
- Victor Guillemin-Multilinear Algebra and Differential Forms For Beginners (Fall 2010 MIT Notes)Document290 pagesVictor Guillemin-Multilinear Algebra and Differential Forms For Beginners (Fall 2010 MIT Notes)deolaya1318No ratings yet
- EEL Continuum PrePrimaryDocument1 pageEEL Continuum PrePrimarysuji1974No ratings yet
- Lesson Plan Gr. 9 Life Orientation T1 W 7&8Document7 pagesLesson Plan Gr. 9 Life Orientation T1 W 7&8jenoNo ratings yet
- Relativistic Quantum Fields 1Document60 pagesRelativistic Quantum Fields 1Junior LimaNo ratings yet
- Pde m1 LernerDocument95 pagesPde m1 Lernerkap42No ratings yet
- Manuscript M1 15 10 2021Document103 pagesManuscript M1 15 10 2021wallonNo ratings yet
- VC RZDocument94 pagesVC RZHSi92100% (2)
- Ebooks File Classical Electromagnetism Second Edition Jerrold Franklin All ChaptersDocument62 pagesEbooks File Classical Electromagnetism Second Edition Jerrold Franklin All Chaptersbolfeksanzo11100% (7)
- 3 LectureOnGeneralRelativity OyvindGronDocument186 pages3 LectureOnGeneralRelativity OyvindGronomid parsiaNo ratings yet
- Webber, Cooper. Theoretical Physics 2 (Quantum Theory) Lecture Notes (Cambridge, 2004) (184s) PDFDocument184 pagesWebber, Cooper. Theoretical Physics 2 (Quantum Theory) Lecture Notes (Cambridge, 2004) (184s) PDFMark Alexander Ruiz100% (1)
- Adel-Bilal QFT 2014Document132 pagesAdel-Bilal QFT 2014LNo ratings yet
- Efficient Numerical Methods For Fractional Differential Equations and Their Analytical BackgroundDocument224 pagesEfficient Numerical Methods For Fractional Differential Equations and Their Analytical BackgroundM. Gökhan HabiboğluNo ratings yet
- Relativistic Quantum Fields 1Document56 pagesRelativistic Quantum Fields 1pticicaaa100% (1)
- 22 Scheme Physics For Eee Module 4 NotesDocument34 pages22 Scheme Physics For Eee Module 4 Notessnehashiragannavar773No ratings yet
- DE - Corrected - 18 12 15 PDFDocument98 pagesDE - Corrected - 18 12 15 PDFIoana Pinzaru100% (1)
- Food ShoppingDocument60 pagesFood ShoppingRushil GholkarNo ratings yet
- Lectures On AMDocument384 pagesLectures On AMPrevalisNo ratings yet
- Math PhysiqueDocument91 pagesMath PhysiqueYoussef ArbaNo ratings yet
- Electromagnetism & Relativity: Brian PendletonDocument106 pagesElectromagnetism & Relativity: Brian PendletonfahimNo ratings yet
- Electromagnetism & Relativity: Brian PendletonDocument106 pagesElectromagnetism & Relativity: Brian PendletonUjjwal Pratap SinghNo ratings yet
- Question Bank MathDocument82 pagesQuestion Bank MathnimiNo ratings yet
- Notes FullDocument139 pagesNotes Fullstoch stephens 005No ratings yet
- Lineear Algebra Ki BookDocument235 pagesLineear Algebra Ki BookYouFroggerzNo ratings yet
- Electromagnetism and Relativity - Brian PendeltonDocument107 pagesElectromagnetism and Relativity - Brian PendeltonMartin Vidmar (Navadimo vas)No ratings yet
- Calculus Question BankDocument83 pagesCalculus Question BankchitraNo ratings yet
- Scattering TheoryDocument131 pagesScattering Theorypepin morenoNo ratings yet
- App Math II For EngineeringDocument86 pagesApp Math II For EngineeringhdjdjsysndNo ratings yet
- 2. Mathematical Methods Class 11 Physics NotesDocument60 pages2. Mathematical Methods Class 11 Physics Notestvipad99No ratings yet
- Manifolds 2012Document95 pagesManifolds 2012Kirk BennettNo ratings yet
- AM Core 2021Document279 pagesAM Core 2021Alex KirimiNo ratings yet
- Clifford Algebra, Geometric Algebra and Applications - Lundholm, DDocument137 pagesClifford Algebra, Geometric Algebra and Applications - Lundholm, DRodrigo LedesmaNo ratings yet
- Theoretical Physics 2 (Quantum Theory) Lecture NotesDocument184 pagesTheoretical Physics 2 (Quantum Theory) Lecture NotesAbdullah SamirNo ratings yet
- Dictaat ScatteringDocument131 pagesDictaat ScatteringSANDIPAN BHATTACHERJEENo ratings yet
- Quantum Radiative Corrections To Slow-Roll InflationDocument81 pagesQuantum Radiative Corrections To Slow-Roll InflationSteven CsornaNo ratings yet
- Calculus Question BankDocument83 pagesCalculus Question BankpoornesNo ratings yet
- Mathematics For Engineers and Scientists 4 Notes For F1.8XD2Document137 pagesMathematics For Engineers and Scientists 4 Notes For F1.8XD2Shailin SequeiraNo ratings yet
- Lecture_Notes_Introduction_to_Differential_GeometrDocument220 pagesLecture_Notes_Introduction_to_Differential_GeometrShakila VNo ratings yet
- Operator Theory Project.Document32 pagesOperator Theory Project.Pintu DasNo ratings yet
- MainDocument114 pagesMainluke091xNo ratings yet
- Prelims Intro Calc Lecture Notes MT 2021Document68 pagesPrelims Intro Calc Lecture Notes MT 2021Russell KohNo ratings yet
- Complete Download Transmission problems for elliptic second order equations in non smooth domains 1st Edition Mikhail Borsuk (Auth.) PDF All ChaptersDocument60 pagesComplete Download Transmission problems for elliptic second order equations in non smooth domains 1st Edition Mikhail Borsuk (Auth.) PDF All Chaptersmalielehde7l100% (4)
- Mathematical Techniques III FigueroaDocument248 pagesMathematical Techniques III FigueroajcgomezuNo ratings yet
- Numerical Methods For Partial Differential Equations: Joachim SCH Oberl April 6, 2009Document135 pagesNumerical Methods For Partial Differential Equations: Joachim SCH Oberl April 6, 2009Javier ToledoNo ratings yet
- Lecture Notes. Waves in Random Media: Guillaume BalDocument102 pagesLecture Notes. Waves in Random Media: Guillaume BaljuliusaisecondNo ratings yet
- Relativistic Quantum Fields 1: Mark Hindmarsh University of Sussex M.b.hindmarsh (NOSPAM) Sussex - Ac.uk Autumn Term 2004Document91 pagesRelativistic Quantum Fields 1: Mark Hindmarsh University of Sussex M.b.hindmarsh (NOSPAM) Sussex - Ac.uk Autumn Term 2004Ayan MitraNo ratings yet
- Prelims Intro Calc Lecture Notes MT 2022Document68 pagesPrelims Intro Calc Lecture Notes MT 2022Chandan GuptaNo ratings yet
- Naspde 039Document126 pagesNaspde 039georgez111No ratings yet
- Complex AnalysisDocument208 pagesComplex AnalysisTamsanqa Miles Kolele100% (3)
- Analysis in MultivariablesDocument90 pagesAnalysis in Multivariablesjohn.saji13No ratings yet
- Maths 3Document88 pagesMaths 3arabisch21.63No ratings yet
- Book Introduction To Quantum Mechanics For StudentsDocument164 pagesBook Introduction To Quantum Mechanics For StudentsMikael SævarNo ratings yet
- PII - Theoretical Physics 2 - Topics in Quantum Theory - (2006) 138pgDocument138 pagesPII - Theoretical Physics 2 - Topics in Quantum Theory - (2006) 138pgfdsdsfsdfmgNo ratings yet
- Inverse ProblemsDocument45 pagesInverse ProblemsJulianDavidPulidoNo ratings yet
- Electromagnetic Theory: Raymond Walters College University of CincinnatiDocument348 pagesElectromagnetic Theory: Raymond Walters College University of Cincinnatibluepearl576No ratings yet
- Clifford AlgebrasDocument117 pagesClifford Algebrasrasgrn7112No ratings yet
- Elliptic Partial Differential Equations and Quasiconformal Mappings in the PlaneFrom EverandElliptic Partial Differential Equations and Quasiconformal Mappings in the PlaneNo ratings yet
- The Finite Element Method for Electromagnetic ModelingFrom EverandThe Finite Element Method for Electromagnetic ModelingGérard MeunierNo ratings yet
- Software Engineering - Ec803a - 12Document4 pagesSoftware Engineering - Ec803a - 12Soumyajit BagchiNo ratings yet
- Vector Spaces: Theory and PracticeDocument23 pagesVector Spaces: Theory and PracticeSoumyajit BagchiNo ratings yet
- Number SystemDocument11 pagesNumber SystemSoumyajit BagchiNo ratings yet
- Brainware University Department of Computer Science & Engineering Course: B. Tech. Computer Science & Engineering (Specialized in Data Science) 2021Document4 pagesBrainware University Department of Computer Science & Engineering Course: B. Tech. Computer Science & Engineering (Specialized in Data Science) 2021Soumyajit BagchiNo ratings yet
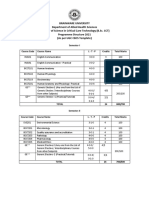
- B.Sc. (CCT) 2021Document4 pagesB.Sc. (CCT) 2021Soumyajit BagchiNo ratings yet
- Application Format For Noc of Vocational ItiDocument1 pageApplication Format For Noc of Vocational ItiSoumyajit BagchiNo ratings yet
- Admission Notice 05 17 18Document1 pageAdmission Notice 05 17 18Soumyajit BagchiNo ratings yet
- 11 SM 2017 Math Eng-1Document222 pages11 SM 2017 Math Eng-1nehabehlNo ratings yet
- Admission ID Name Sex Caste P.H. Board F. Lang S. Lang UG/PG Course ID Sub. Id Sub. Combination RollDocument2 pagesAdmission ID Name Sex Caste P.H. Board F. Lang S. Lang UG/PG Course ID Sub. Id Sub. Combination RollSoumyajit BagchiNo ratings yet
- Admission Id Name Sex Caste Board F. Lang S. Lang Ug/Pg Course Id Sub Id Sub. Combination RollnoDocument1 pageAdmission Id Name Sex Caste Board F. Lang S. Lang Ug/Pg Course Id Sub Id Sub. Combination RollnoSoumyajit BagchiNo ratings yet
- Chapter 4 em Eng 1Document16 pagesChapter 4 em Eng 1Jero RafaelNo ratings yet
- Salesforce QB - Internal FinalDocument6 pagesSalesforce QB - Internal Final20kd1a05c1No ratings yet
- Wide Band FM If DemodulatorDocument28 pagesWide Band FM If DemodulatorA. Villa100% (1)
- Review 2Document8 pagesReview 2Phong Trần ThanhNo ratings yet
- On Adaptation of English Nominal Compounds in The Serbian Language With Reference To Word-Formation TypesDocument8 pagesOn Adaptation of English Nominal Compounds in The Serbian Language With Reference To Word-Formation TypesIjahss JournalNo ratings yet
- Lesson Plan RubricDocument3 pagesLesson Plan Rubricapi-452943700No ratings yet
- Script VipproDocument2 pagesScript VipproXauSkeletonNo ratings yet
- Enduring Legacy: A Trail of Doctrinal Uniqueness and Unity of The Evangelical Church Winning ALL (ECWA)Document12 pagesEnduring Legacy: A Trail of Doctrinal Uniqueness and Unity of The Evangelical Church Winning ALL (ECWA)Titus TankoNo ratings yet
- Java Io NotesDocument19 pagesJava Io Notesgupta_ssrkm2747No ratings yet
- Advanced Trigonometry Calculator - User GuideDocument100 pagesAdvanced Trigonometry Calculator - User Guiderenatofreitas91No ratings yet
- COEN 231 CourseSummary W18 VFDocument5 pagesCOEN 231 CourseSummary W18 VFMohammad Ali ZahirNo ratings yet
- IMSLP622465-PMLP442568-Iwan Müller - Duo Concertante Op 23 - Violin 2Document6 pagesIMSLP622465-PMLP442568-Iwan Müller - Duo Concertante Op 23 - Violin 2hamidNo ratings yet
- Bài test ôn tập hệ quản trị CSDLDocument17 pagesBài test ôn tập hệ quản trị CSDLHồng Hạnh NguyễnNo ratings yet
- Detailed Lesson Plan Columbus PoetryDocument2 pagesDetailed Lesson Plan Columbus Poetrydaren verdidaNo ratings yet
- Poweredge-6800 User's Guide En-UsDocument31 pagesPoweredge-6800 User's Guide En-UsRamskiNo ratings yet
- Bae, Jacqueline Nichole D. - 3A7 - Midterm ProjectDocument4 pagesBae, Jacqueline Nichole D. - 3A7 - Midterm Projectjacqueline baeNo ratings yet
- Complete The SentencesDocument9 pagesComplete The SentencesAlbaVozmedianoRodillaNo ratings yet
- What Are Arguments?: Logic Is The Science That EvaluatesDocument9 pagesWhat Are Arguments?: Logic Is The Science That EvaluatesHami KhaNNo ratings yet
- Unclaimed Dividend 200809 79Document4 pagesUnclaimed Dividend 200809 79Nasir AhmedNo ratings yet
- The Love PotionDocument11 pagesThe Love PotionzanelemarionkhanyileNo ratings yet
- Operasional Riset II Program DinamikDocument8 pagesOperasional Riset II Program DinamikSendi PTMNo ratings yet
- Time LinkerDocument16 pagesTime LinkerHema SengodanNo ratings yet
- H480C OI RuDocument168 pagesH480C OI Rudenwww2015No ratings yet
- Trithemius Johannes Encyclopedia of RenaDocument3 pagesTrithemius Johannes Encyclopedia of RenasabscribdNo ratings yet
- An Introduction To The VinADocument77 pagesAn Introduction To The VinATim100% (2)
- English 9 Test Questionaire 2nd QuarterDocument14 pagesEnglish 9 Test Questionaire 2nd QuarterRicardo Acedo Jr.No ratings yet
- Modals For DeductionDocument3 pagesModals For DeductiondaliborsekiNo ratings yet