Himatrix f3 Aio 84 01
Himatrix f3 Aio 84 01
Uploaded by
khaldoun samiCopyright:
Available Formats
Himatrix f3 Aio 84 01
Himatrix f3 Aio 84 01
Uploaded by
khaldoun samiOriginal Title
Copyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Copyright:
Available Formats
Himatrix f3 Aio 84 01
Himatrix f3 Aio 84 01
Uploaded by
khaldoun samiCopyright:
Available Formats
HIMatrix
Safety-Related Controller
F3 AIO 8/4 01 Manual
HIMA Paul Hildebrandt GmbH + Co KG
Industrial Automation
Rev. 1.01 HI 800 161 E
All HIMA products mentioned in this manual are protected by the HIMA trade-mark. Unless noted
otherwise, this also applies to other manufacturers and their respective products referred to herein.
All of the instructions and technical specifications in this manual have been written with great care and
effective quality assurance measures have been implemented to ensure their validity. For questions,
please contact HIMA directly. HIMA appreciates any suggestion on which information should be
included in the manual.
Equipment subject to change without notice. HIMA also reserves the right to modify the written material
without prior notice.
For further information, refer to the CD-ROM and our website http://www.hima.de and
http://www.hima.com.
© Copyright 2010, HIMA Paul Hildebrandt GmbH + Co KG
All rights reserved
Contact
HIMA Address
HIMA Paul Hildebrandt GmbH + Co KG
P.O. Box 1261
68777 Brühl, Germany
Tel: +49 6202 709-0
Fax: +49 6202 709-107
E-mail: info@hima.com
Revision Revisions Type of Change
index technical editorial
1.00 Added: Configuration with SILworX; X X
Chapter Connection Variants
1.01 Deleted: Chapter Monitoring the Temperature State displaced into X
the system manual
HI 800 161 E Rev. 1.01 (1025)
F3 AIO 8/4 01 Table of Contents
Table of Contents
1 Introduction ............................................................ 5
1.1 Structure and Use of this Manual......................................................................... 5
1.2 Target Audience..................................................................................................... 6
1.3 Formatting Conventions ....................................................................................... 7
1.3.1 Safety Notes ............................................................................................................ 7
1.3.2 Operating Tips ......................................................................................................... 8
2 Safety ...................................................................... 9
2.1 Intended Use .......................................................................................................... 9
2.1.1 Environmental Requirements................................................................................... 9
2.1.2 ESD Protective Measures........................................................................................ 9
2.2 Residual Risk ....................................................................................................... 10
2.3 Safety Precautions............................................................................................... 10
2.4 Emergency Information....................................................................................... 10
3 Product Description .............................................. 11
3.1 Safety Function .................................................................................................... 11
3.1.1 Safety-Related Analog Inputs ................................................................................ 11
3.1.1.1 Reaction in the Event of a Fault............................................................................. 12
3.1.2 Line Monitoring for Digital Outputs......................................................................... 12
3.1.2.1 Requirements......................................................................................................... 12
3.1.2.2 Examples ............................................................................................................... 12
3.2 Analog Outputs .................................................................................................... 17
3.3 Equipment, Scope of Delivery ............................................................................ 18
3.3.1 IP Address and System ID (SRS) .......................................................................... 18
3.4 Type Label ............................................................................................................ 19
3.5 Assembly .............................................................................................................. 20
3.5.1 LED Indicators ....................................................................................................... 21
3.5.1.1 Operating Voltage LED .......................................................................................... 21
3.5.1.2 System LEDs ......................................................................................................... 22
3.5.1.3 Communication LEDs ............................................................................................ 23
3.5.2 Communication ...................................................................................................... 24
3.5.2.1 Connections for Ethernet Communication ............................................................. 24
3.5.2.2 Network Ports Used for Ethernet Communication ................................................. 24
3.5.3 Reset Key .............................................................................................................. 25
3.6 Product Data......................................................................................................... 26
3.6.1 Product Data F3 AIO 8/4 011 (-20 °C) ................................................................... 27
3.6.2 Product Data F3 AIO 8/4 012 (subsea / -20°C) ..................................................... 27
3.7 Certified HIMatrix F3 AIO 8/4 01.......................................................................... 29
4 Start-Up................................................................. 30
4.1 Installation and Mounting ................................................................................... 30
4.1.1 Connecting the Analog Inputs................................................................................ 30
4.1.1.1 Shunt Adapter ........................................................................................................ 31
HI 800 161 E Rev. 1.01 Page 3 of 54
Table of Contents F3 AIO 8/4 01
4.1.2 Connecting the Analog Outputs ............................................................................. 31
4.1.3 Mounting the F3 AIO 8/4 01 in Zone 2 ................................................................... 32
4.2 Configuration ........................................................................................................ 33
4.3 Configuring a Remote I/O with SILworX............................................................. 33
4.3.1 Parameters and Error Codes for the Inputs and Outputs ....................................... 33
4.3.2 Analog Inputs F3 AIO 8/4 01 .................................................................................. 34
4.3.2.1 Module Tab............................................................................................................ 34
4.3.2.2 AI 8: Channels Tab ............................................................................................... 35
4.3.3 Analog Outputs F3 AIO 8/4 01 ............................................................................... 36
4.3.3.1 Module Tab............................................................................................................ 36
4.3.3.2 AO 8: Channels Tab ............................................................................................. 37
4.4 Configuring a Resource Using ELOP II Factory ................................................ 37
4.4.1 Configuring the Inputs and Outputs........................................................................ 37
4.4.2 Signals and Error Codes for the Inputs and Outputs.............................................. 37
4.4.3 Analog Inputs F3 AIO 8/4 01 .................................................................................. 38
4.4.4 Analog Outputs F3 AIO 8/4 01 ............................................................................... 40
4.5 Connection Variants............................................................................................. 41
4.5.1 Connecting Proximity Switches .............................................................................. 41
4.5.1.1 Limits to Configure in the User Program ................................................................ 42
5 Operation .............................................................. 43
5.1 Handling ................................................................................................................ 43
5.2 Diagnosis .............................................................................................................. 43
6 Maintenance .......................................................... 44
6.1 Faults..................................................................................................................... 44
6.1.1 Operating System Version 6.42 and Beyond ......................................................... 44
6.1.2 Operating System Versions Prior to 6.42 ............................................................... 44
6.2 Maintenance Measures ........................................................................................ 44
6.2.1 Loading the Operating System ............................................................................... 44
6.2.2 Proof Test............................................................................................................... 44
7 Decommissioning .................................................. 45
8 Transport .............................................................. 46
9 Disposal ................................................................ 47
Appendix ............................................................... 49
Glossary ................................................................................................................ 49
Index of Figures.................................................................................................... 50
Index of Tables ..................................................................................................... 51
Index ...................................................................................................................... 52
Page 4 of 54 HI 800 161 E Rev. 1.01
F3 AIO 8/4 01 1 Introduction
1 Introduction
This manual describes the technical characteristics of the device and its use. It also
includes instructions on how to install, start up and replace it.
1.1 Structure and Use of this Manual
The content of this manual is part of the hardware description of the HIMatrix
programmable electronic system.
This manual is organized in the following main chapters:
Introduction
Safety
Product Description
Start-Up
Operation
Maintenance
Decommissioning
Transport
Disposal
This manual distinguishes between the following variants of the HIMatrix system:
Programming tool Processor operating system
SILworX Versions Beyond 7
ELOP II Factory Versions Prior to 7
Table 1: HIMatrix System Variants
The manual distinguishes among the different variants using:
Separated chapters,
Tables differentiating among the versions, e.g., versions beyond 7, or prior to 7
Projects created with ELOP II Factory cannot be edited with SILworX, and vice versa!
i
This manual usually refers to compact controllers and remote I/Os as devices, and to the
i plug-in cards of a modular controller as modules.
HI 800 161 E Rev. 1.01 Page 5 of 54
1 Introduction F3 AIO 8/4 01
Additionally, the following documents must be taken into account:
Name Content Document number
HIMatrix System Manual Hardware description of the HIMatrix HI 800 141 E
Compact Systems compact systems
HIMatrix System Manual Hardware description of the HIMatrix HI 800 191 E
Modular System F60 modular system
Himatrix Safety Manual Safety functions of the HIMatrix HI 800 023 E
system
HIMatrix Engineering Project planning description for HI 800 101 E
Manual HIMatrix systems
SILworX Online Help Instructions on how to use SILworX -
ELOP II Factory Online Instructions on how to use ELOP II -
Help Factory, Ethernet IP protocol,
INTERBUS protocol
First Steps Introduction to SILworX using the HI 801 103 E
SILworX HIMax system as an example
First Steps Introduction to ELOP II Factory HI 800 006 E
ELOP II Factory
Table 2: Additional Relevant Documents
The latest manuals can be downloaded from the HIMA website www.hima.com. The
revision index on the footer can be used to compare the current version of existing manuals
with the Internet edition.
1.2 Target Audience
This document addresses system planners, configuration engineers, programmers of
automation devices and personnel authorized to implement, operate and maintain the
modules and systems. Specialized knowledge of safety-related automation systems is
required.
Page 6 of 54 HI 800 161 E Rev. 1.01
F3 AIO 8/4 01 1 Introduction
1.3 Formatting Conventions
To ensure improved readability and comprehensibility, the following fonts are used in this
document:
Bold: To highlight important parts
Names of buttons, menu functions and tabs that can be clicked and
used in the programming tool.
Italics: For parameters and system variables
Courier Literal user inputs
RUN Operating state are designated by capitals
Chapter 1.2.3 Cross references are hyperlinks even though they are not
particularly marked. When the cursor hovers over a hyperlink, it
changes its shape. Click the hyperlink to jump to the corresponding
position.
Safety notes and operating tips are particularly marked.
1.3.1 Safety Notes
The safety notes are represented as described below.
These notes must absolutely be observed to reduce the risk to a minimum. The content is
structured as follows:
Signal word: danger, warning, caution, notice
Type and source of danger
Consequences arising from the danger
Danger prevention
SIGNAL WORD
Type and source of danger!
Consequences arising from the danger
Danger prevention
The signal words have the following meanings:
Danger indicates hazardous situation which, if not avoided, will result in death or serious
injury.
Warning indicates hazardous situation which, if not avoided, could result in death or
serious injury.
Warning indicates hazardous situation which, if not avoided, could result in minor or
modest injury.
Notice indicates a hazardous situation which, if not avoided, could result in property
damage.
NOTE
Type and source of damage!
Damage prevention
HI 800 161 E Rev. 1.01 Page 7 of 54
1 Introduction F3 AIO 8/4 01
1.3.2 Operating Tips
Additional information is structured as presented in the following example:
The text corresponding to the additional information is located here.
i
Useful tips and tricks appear as follows:
TIP The tip text is located here.
Page 8 of 54 HI 800 161 E Rev. 1.01
F3 AIO 8/4 01 2 Safety
2 Safety
The following safety information, notes and instructions must be strictly observed. The
product may only be used if all guidelines and safety instructions are adhered to.
This product is operated with SELV or PELV. No imminent danger results from the product
itself. The use in Ex-Zone is permitted if additional measures are taken.
2.1 Intended Use
HIMatrix components are designed for assembling safety-related controller systems.
When using the components in the HIMatrix system, comply with the following general
requirements
2.1.1 Environmental Requirements
Requirement type Range of values 1)
Protection class Protection class III in accordance with IEC/EN 61131-2
Ambient temperature 0...+60 °C
Storage temperature -40...+85 °C
Pollution Pollution degree II in accordance with IEC/EN 61131-2
Altitude < 2000 m
Housing Standard: IP20
Supply voltage 24 VDC
1)
The values specified in the technical data apply and are decisive for devices with
extended environmental requirements.
Table 3: Environmental Requirements
Exposing the HIMax system to environmental conditions other than those specified in this
manual can cause the HIMatrix system to malfunction.
2.1.2 ESD Protective Measures
Only personnel with knowledge of ESD protective measures may modify or extend the
system or replace devices.
NOTE
Device damage due to electrostatic discharge!
When performing the work, make sure that the workspace is free of static, and
wear an ESD wrist strap.
If not used, ensure that the device is protected from electrostatic discharge, e.g.,
by storing it in its packaging.
HI 800 161 E Rev. 1.01 Page 9 of 54
2 Safety F3 AIO 8/4 01
2.2 Residual Risk
No imminent danger results from a HIMatrix system itself.
Residual risk may result from:
Faults in the engineering
Faults in the user program
Faults in the wiring
2.3 Safety Precautions
Observe all local safety requirements and use the protective equipment required on site.
2.4 Emergency Information
A HIMatrix system is a part of the safety equipment of a site.If a device or a module fails,
the site adopts the safe state.
In case of emergency, no action that may prevent the HIMatrix systems from operating
safely is permitted.
Page 10 of 54 HI 800 161 E Rev. 1.01
F3 AIO 8/4 01 3 Product Description
3 Product Description
The safety-related F3 AIO 8/4 01 remote I/O is a compact system located in a metal
enclosure with 8 analog inputs and 4 analog outputs.
The remote I/O is available in three model variants for SILworX and three model variants
for ELOP II Factory, see Chapter 3.3. All variants are described in this manual.
The remote I/O serves as extension of the I/O level of HIMax and HIMatrix controllers, and
is connected to them via safeethernet. The remote I/O itself is not able to run a user
program.
The HIMatrix remote I/Os are not multi-master capable.
The remote I/O is suitable for mounting in Ex-zone 2, see Chapter 4.1.3.
The device has been certified by the TÜV for safety-related applications up to SIL 3 (IEC
61508, IEC 61511 and IEC 62061), Cat. 4 (EN 954-1) and PL e (EN ISO 13849-1). Further
safety standards, application standards and test standards are specified in the certificate
available on the HIMA website.
3.1 Safety Function
The remote I/O is equipped with safety-related analog inputs. The input values on the
inputs are safely transmitted to the connected controller via safeethernet. The outputs are
safely assigned their values by the connected controller via safeethernet.
3.1.1 Safety-Related Analog Inputs
The remote I/O is equipped with 8 analog inputs with transmitter supplies for the unipolar
measurement of voltages, referenced to L-.
The remote I/O is intended to measure the voltage on the inputs. To measure the current
on the inputs, connect a resistor of up to 500 Ω in parallel to each input.
Only shielded cables with a length of a maximum of 300 m must be connected to the
analog inputs. Each analog input must be connected to a twisted pair of wires. The
shielding must be connected to the remote I/O and the sensor housing and earthed of one
end to the remote I/O side to form a Faraday cage.
Unused input channels must each be short-circuited to the ground (L-).
i
The following input values are available:
Input Polarity Current Range of values Safety-related
channels Voltage in the application accuracy
8 unipolar 0...+10 V 0...2000 2%
0...10001) 2%
8 unipolar 0/4...20 mA
0…20002) 2%
1)
with external Z 7301 shunt adapter, see Chapter 4.1.1.1
2)
with external Z 7302 shunt adapter, see Chapter 4.1.1.1
Table 4: Input Values for the Analog Inputs
HI 800 161 E Rev. 1.01 Page 11 of 54
3 Product Description F3 AIO 8/4 01
If an open-circuit occurs during voltage measurement (the line is not monitored), any input
signals are processed on the high-resistance inputs. The value resulting from this
fluctuating input voltage is not reliable; with voltage inputs, the channels must be terminated
with a 10 kΩ resistor. The internal resistance of the source must be taken into account.
For a current measurement with the shunt connected in parallel, the 10 kΩ resistor is not
required.
The analog inputs are designed to retain the metrological accuracy for 10 years. A
recalibration must be carried out every 10 years.
3.1.1.1 Reaction in the Event of a Fault
If the device detects a fault on an analog input, the AI.Error Code system parameter > 0 is
set. In case of module faults, the Mod. Error Code system parameter > 0 is set.
In both cases, the device activates the FAULT LED.
In addition to the analog value the the error code must be evaluated. The analog value
must be configured to ensure a safety-related reaction.
The error code allows the user to configure additional fault reactions in the user program.
3.1.2 Line Monitoring for Digital Outputs
The analog inputs (AI) of the F3 AIO 8/4 01 can also be used to monitor the line for open-
circuits and short-circuits of digital outputs of other HIMatrix controllers (line monitoring). To
this end, the transmitter supply must be set to 26 V. To do so, set the Transmitter
Voltage[01] parameter in SILworX and ELOP II Factory to 2, see Table 26 und Table 30.
3.1.2.1 Requirements
Using HIMatrix devices with analog inputs, the digital outputs of any HIMatrix controller can
be monitored under the following conditions:
The transmitter supply of analog inputs exists,
An external shunt can be connected to the analog inputs.
These conditions apply for all systems within the HIMatrix family, from compact to modular
systems.
3.1.2.2 Examples
The digital outputs of the F2 DO 16 01 or F20 can be monitored with the analog inputs of
the F3 AIO 8/4 01.
The analog inputs of the F3 AIO 8/4 01 can monitor the digital outputs of the DIO 24/16 01
(modular system).
Figure 1 shows how the lines of a digital output (DO) to an actuator (e.g., solenoid valve)
can be monitored for open-circuits and short-circuits.
The connection must be adapted to the field devices used and the functionality checked
i accordingly!
Page 12 of 54 HI 800 161 E Rev. 1.01
F3 AIO 8/4 01 3 Product Description
Circuitry:
Series Resistor (Rseries resistor) Field Clamp Terminal
Field Clamp Terminal Series Resistor (RDiode)
Solenoid Valve 8 W, 24 VDC Shunt (RShunt)
Figure 1: Circuitry for Line Monitoring
Line monitoring (LB/LS) range
Protective circuit with short-circuit
Examples of how to configure line monitoring for the digital output DO (circuit with solenoid
valve 8 W 24 VDC):
Resistance values:
Series resistor: Rseries resistor 1.6 kΩ
Solenoid valve resistance: Rsolenoid valve 75 Ω
Shunt: Rshunt 10 Ω
Table 5: Examples of Line Monitoring - Resistance Values
Voltage values:
Transmitter voltage: 26.4 V
Output voltage DO during normal operation: 24 V
Output voltage DO with a short-circuit: 26.8 V
Voltage drop on the solenoid valve: 21 V
Switching voltage of the Z-diode: 12 V
Table 6: Examples of Line Monitoring - Voltage Values
HI 800 161 E Rev. 1.01 Page 13 of 54
3 Product Description F3 AIO 8/4 01
Measured values for voltage on AI with line monitoring of DO
Voltage drop Voltage drop Voltage drop Values for AI
Rseries resistor Rsolenoid valve RShunt (with FSx000 resolution)
FS1000 FS2000
Output DO False or 0
(output DO is deactivated; de-energized state)
25.08 V 1.15 V 0.15 V 14 28
Output DO True or 1
(output DO activated)
- 21 V 3V 300 600
Break in the field wiring
- - 0V 0 0
Short-circuit in the field wiring or actuator
- 0V 26.8 V 10001) 20001)
1)
maximum resolution of the analog inputs AI with voltage limited to 12 V by Z-diode
Table 7: Voltage Values with Line Monitoring of DO
Illustration of Figure 1 and Table 7
1. Open-circuit:
The supply voltage of the series resistor (transmitter voltage) fluctuates within a tolerance
range, see Specifications in Table 18. For this reason, the voltage drops on the resistors
can change slightly. Within the fluctuation range, a measurable voltage drop is definitely still
detected on shunt Rshunt.
The series resistor was dimensioned such that when DO = FALSE, the voltage drop on the
solenoid valve is as low as possible (valve is slightly warmed up) and the voltage drop on
the shunt is still measurable.
The shunt Rshunt was measured with dependence on the solenoid valve resistance such that
if the output DO is activated (DO = TRUE), the voltage drop on the solenoid valve is higher
than the switching threshold of the solenoid valve, i.e., the coil of the solenoid valve is
energized.
Additionally, the shunt RShunt is designed such that with any switching state of the output
DO (TRUE or FALSE), a measurable voltage drop results (values for AI > 10, see Table 7).
On the other hand, if field wiring breakage occurs within the red-colored area, voltage drops
are no longer present on the shunt.
An open-circuit within the red-colored area (see Figure 1) can be monitored through the
voltage drop on the shunt Rshunt , i.e., the input value of AI, see Table 7.
To allow line monitoring, the value of AI must be evaluated in the logic of the user program.
Connect the series resistor Rseries resistor and the shunt Rshunt directly to the terminals of the
i controller or remote I/O to maximize the monitored line area.
Page 14 of 54 HI 800 161 E Rev. 1.01
F3 AIO 8/4 01 3 Product Description
2. Short-circuit:
An short-circuit within the actuator circuitry (including the actuator) results in a high voltage
drop (≤ output voltage of DO) through the shunt, which causes the short-circuit to be
detected (maximum resolution of AI, see Table 7). The overvoltage protection of the analog
inputs is activated at approximately 15 V.
A protective circuit consisting of a Z-diode and series resistor must be implemented to
avoid an overload of the internal overvoltage protection.
NOTE
To protect the input multiplexer of the analog inputs from overload, a protective
circuit consisting of Z-diode and a series resistor must be connected within the input
circuit in parallel to the existing shunt
The configuration of the Z-diode with series resistor depends on the overvoltage protection
threshold and must be set up to ensure that the HIMatrix overvoltage protection is not
activated if a short-circuit occurs.
Configuration example for short-circuits:
Shunt: Rshunt 10 Ω
Solenoid valve resistance: Rsolenoid valve 75 Ω
Maximum output voltage of the digital output DO Umax 26.8 V
Table 8: Example of Short-Circuit
Z-diode with switching voltage of 12 V
Analog input with operating range of 0...10 V
Overvoltage protection in the HIMatrix with input voltage > 15 V
Normal operation (no short-circuit):
Umax = Usolenoid valve + Ushunt = 26.8 V = 23.65 V + 3.15 V
The voltage Ushunt is also present on the protective circuit consisting of Z-diode and series
resistor.
The Z-diode does not switch on at 3.15 V, i.e., the voltage drop of 3.15 V on the shunt is
present on the analog input.
Short-circuit:
Umax = Usolenoid valve + Ushunt = 26.8 V = 0 V + 26.8 V
If a short-circuit occurs in the external circuit (actuator or line), the voltage from DO is
dropped completely at the shunt.
The switching threshold of the overvoltage protection of AI is approximately 15 V.
The Z-diode should become conductive at 12 V such that no more than 12 V is present on
AI and the entire scaling range of AI is available.
The maximum voltage drop Udiode on the series resistor Rdiode of the Z-diode results from:
Udiode = 26.8 V – 12 V = 14.8 V
HI 800 161 E Rev. 1.01 Page 15 of 54
3 Product Description F3 AIO 8/4 01
The current through the Z-diode should be limited to 20 mA (specification of the Z-diode).
This results in a minimum value for the series resistor of:
Rdiode = 14.8 V / 20 mA = 740 Ω
The value for Rdiode can be set to 1 KΩ.
This resistance limits the maximum current through the Z-diode to approximately 15 mA.
A short-circuit within the red-colored area (see circuit diagram) can be monitored through
the voltage drop on the shunt Rshunt, i.e., the input value of AI, see Table 7.
To allow line monitoring, the value of AI must be evaluated in the logic of the user program.
Page 16 of 54 HI 800 161 E Rev. 1.01
F3 AIO 8/4 01 3 Product Description
3.2 Analog Outputs
The remote I/O is equipped with 4 analog outputs. These outputs are not safety-related, but
all together they can be shut down safely thanks to the configuration in the user program.
To achieve SIL 3, the output values must be read back via safety-related analog inputs and
evaluated in the user program. Reactions to incorrect output values must also be specified
in the user program.
NOTE
The analog outputs may only be used as safety-related outputs, if the output values
are read back to safety-related analog inputs and evaluated in the user program.
To configure the safe reaction, set the 4 Channel Used [BOOL] -> system parameters to
FALSE (SILworX) or the 4 AO[1..4].Used system signals to FALSE (ELOP II Factory). This
opens internal safety switches, ensuring that no output signal is output.
Alternatively, the safety reaction can be triggered using the Emergency Stop system
variable.
Application example for safety-related analog outputs
Rshunt Actuator
Figure 2: Application Example for Safety-Related Analog Outputs
The following output values are available:
Range of values in the application Output current
0 0.0 mA
2000 20.0 mA
Table 9: Output Values of the Analog Outputs
The analog outputs are designed to retain the metrological accuracy for 10 years. A
recalibration must be carried out every 10 years.
HI 800 161 E Rev. 1.01 Page 17 of 54
3 Product Description F3 AIO 8/4 01
3.3 Equipment, Scope of Delivery
The following list specifies the available components and the corresponding part numbers:
Designation Description Part no.
F3 AIO 8/4 01 Remote I/O with 8 analog inputs and 4 non-safety- 98 2200409
related analog outputs,
Operating temperature 0…+60 °C, for ELOP II
Factory programming tool
F3 AIO 8/4 011 Remote I/O with 8 analog inputs and 4 non-safety- 98 2200457
(-20 °C) related analog outputs,
Operating temperature -20…+60 °C, for ELOP II
Factory programming tool
F3 AIO 8/4 012 Remote I/O with 8 analog inputs and 4 non-safety- 98 2200458
(subsea / -20 °C) related analog outputs,
Operating temperature -20…+60 °C, subsea,
Complying with ISO 13628-6: 2006, for ELOP II
Factory programming tool
F3 AIO 8/4 01 Remote I/O with 8 analog inputs and 4 non-safety- 98 2200483
SILworX related analog outputs,
Operating temperature 0…+60 °C, for SILworX
programming tool
F3 AIO 8/4 011 Remote I/O with 8 analog inputs and 4 non-safety- 98 2200489
SILworX related analog outputs,
(-20 °C) Operating temperature -20…+60 °C, for SILworX
programming tool
F3 AIO 8/4 012 Remote I/O with 8 analog inputs and 4 non-safety- 98 2200493
SILworX related analog outputs,
(subsea / -20 °C) Operating temperature -20…+60 °C, subsea,
Complying with ISO 13628-6: 2006, for SILworX
programming tool
Table 10: Part Numbers
3.3.1 IP Address and System ID (SRS)
A transparent label is delivered with the device to allow one to note the IP address and the
system ID (SRS for system rack slot) after a change.
IP___.___.___.___SRS____.__.__
Default value for IP address: 192.168.0.99
Default value for SRS: 60000.200.0 (SILworX)
60000.0.0 (ELOP II Factory)
The label must be affixed such that the ventilation slots in the housing are not obstructed.
Refer to the First Steps manual of the programming tool for more information on how to
modify the IP address and the system ID.
Page 18 of 54 HI 800 161 E Rev. 1.01
F3 AIO 8/4 01 3 Product Description
3.4 Type Label
The type plate contains the following details:
Product name
Bar code (1D or 2D code)
Part no.
Production year
Hardware revision index (HW Rev.)
Firmware revision index (FW Rev.)
Operating voltage
Mark of conformity
Figure 3: Sample Type Label
HI 800 161 E Rev. 1.01 Page 19 of 54
3 Product Description F3 AIO 8/4 01
3.5 Assembly
This chapter describes the layout and function of the remote I/Os, and their communication
via safeethernet.
AIO
8/4 01
Figure 4: Front View
8 Analog Inputs Watchdog
Safety-Related Processor System 4 Analog Outputs
Switch
Figure 5: Block Diagram
Page 20 of 54 HI 800 161 E Rev. 1.01
F3 AIO 8/4 01 3 Product Description
3.5.1 LED Indicators
The light-emitting diodes (LEDs) indicate the operating state of the remote I/O. The LEDs
are classified as follows:
Operating voltage LED
System LEDs
Communication LEDs
3.5.1.1 Operating Voltage LED
LED Color Status Description
24 VDC Green On 24 VDC operating voltage present
Off No operating voltage
Table 11: Operating Voltage LED
HI 800 161 E Rev. 1.01 Page 21 of 54
3 Product Description F3 AIO 8/4 01
3.5.1.2 System LEDs
While the system is being booted, all LEDs are lit simultaneously.
LED Color Status Description
RUN Green On Device in RUN, normal operation
A loaded user program is being executed (not with remote I/Os).
Blinking Device in STOP
A new operating system is being loaded.
Off The device is not in the RUN state.
ERROR Red On The device is in the ERROR STOP state.
Internal fault detected by self-tests
e.g., hardware fault, software error or cycle time overrun.
The processor system can only be restarted with a command from
the PADT (reboot).
Blinking If ERROR blinks and all others LEDs are lit simultaneously, the boot
loader has detected an operating system fault in the flash memory
and waits for a new operating system to be loaded.
Off No faults detected.
PROG Yellow On A new configuration is being loaded into the device.
Blinking The device switches from INIT to STOP
A new operating system is being loaded into the flash ROM.
Off No configuration or operating system is being loaded.
FORCE Yellow On The device is in RUN, forcing was activated.
Blinking The device is in STOP, forcing has been prepared and is activated
when the device is started.
Off Forcing is not activated.
The FORCE LED of a remote I/O is not functioning. The FORCE
LED of the associated controller serves to signal the forcing of a
remote I/O.
FAULT Yellow On The loaded configuration is defective.
The new operating system is corrupted (after OS download).
Blinking Fault while loading a new operating system
One or multiple I/O faults occurred.
Off None of the described faults occurred.
OSL Yellow Blinking Operating system emergency loader active.
Off Operating system emergency loader inactive.
BL Yellow Blinking OS and OLS binary defective or INIT_FAIL hardware fault.
Off Boot loader inactive
Table 12: System LEDs
Page 22 of 54 HI 800 161 E Rev. 1.01
F3 AIO 8/4 01 3 Product Description
3.5.1.3 Communication LEDs
All RJ-45 connectors are provided with a small green and a yellow LEDs. The LEDs signal
the following states:
LED Status Description
Green On Full duplex operation
Blinking Collision
Off Half duplex operation, no collision
Yellow On Connection available
Blinking Interface activity
Off No connection available
Table 13: Ethernet Indicators
HI 800 161 E Rev. 1.01 Page 23 of 54
3 Product Description F3 AIO 8/4 01
3.5.2 Communication
The remote I/O communicates with the associated controller via safeethernet.
3.5.2.1 Connections for Ethernet Communication
Property Description
Port 2 x RJ-45
Transfer standard 10/100/Base-T, half and full duplex
Auto negotiation Yes
Auto crossover Yes
Connection socket RJ-45
IP address Freely configurable1)
Subnet mask Freely configurable1)
Supported protocols Safety-related: safeethernet
Non-safety-related:
programming and debugging tool (PADT), SNTP
1)
The general rules for assigning IP address and subnet masks must be adhered to.
Table 14: Ethernet Interfaces Properties
The two RJ-45 connectors with integrated LEDs are located on the bottom left-hand side of
the enclosure. Refer to Chapter 3.5.1.3 for a description of the LEDs' function.
The connection parameters are read based on the MAC address (media access control
address) defined during manufacturing.
The MAC address for the remote I/O is specified on a label located above the two RJ-45
connectors (1 and 2).
Figure 6: Sample MAC Address Label
The remote I/O is equipped with an integrated switch for safety-related Ethernet
communication (safeethernet). For further information on the integrated switch and
safeethernet, refer to Chapter Communication of the System Manual for Compact Systems
(HI 800 141 E).
3.5.2.2 Network Ports Used for Ethernet Communication
UDP ports Usage
8000 Programming and operation with the programing tool
8001 Configuration of the remote I/O using the PES (ELOP II Factory)
8004 Configuration of the remote I/O using the PES (SILworX)
6010 safeethernet
123 SNTP (time synchronization between PES and remote I/O, PES and
external devices)
Table 15: Network Ports in Use
Page 24 of 54 HI 800 161 E Rev. 1.01
F3 AIO 8/4 01 3 Product Description
3.5.3 Reset Key
The remote I/O is equipped with a reset key. The key is only required if the user name or
password for administrator access is not known. If only the IP address set for the remote
I/O does not match the PADT (PC), the connection can be established with a Route add
entry on the PC.
The key can be accessed through a small round hole located approximately 5 cm from the
upper left-hand side of the enclosure. The key is engaged using a suitable pin made of
insulating material to avoid short-circuits within the remote I/O.
The reset is only effective if the remote I/O is rebooted (switched off and on) while the key
is simultaneously engaged for at least 20 seconds. Engaging the key during operation has
no effect.
Properties and behavior of the remote I/IO after a reboot with engaged reset key:
Connection parameters (IP address and system ID) are set to the default values.
All accounts are deactivated except for the default account administrator with empty
password.
After a new reboot without the reset key engaged
the user-defined connection parameters (IP address and system ID) and accounts
become effective.
no changes were performed, and the connection parameters and accounts valid prior to
the reboot with the reset key engaged still apply.
HI 800 161 E Rev. 1.01 Page 25 of 54
3 Product Description F3 AIO 8/4 01
3.6 Product Data
General
Response time ≥ 20 ms
Ethernet interfaces 2 x RJ-45, 10/100BaseT (with 100 Mbit/s) with integrated switch
Operating voltage 24 VDC, -15 %...+20 %, wss ≤ 15 %,
from a power supply unit with safe insulation in accordance with
IEC 61131-2.
Current input max. 0.8 A (with maximum load)
Idle: approx. 0.4 A at 24 V
Fuse (external) 10 A time-lag (T)
back-up battery None
Operating 0 °C...+60 °C
temperature
Storage temperature -40 °C...+85 °C
Type of protection IP20
Max. dimensions Width: 207 mm (with enclosure screws)
(without plug) Height: 114 mm (with fixing bolt)
Depth: 97 mm (with earthing rail)
Weight 0.95 kg
Table 16: Product Data
Analog inputs
Number of inputs 8 (non-galvanically isolated)
Nominal range 0...+10 VDC,
0/4...+20 mA with 500 Ω shunt
Operating range -0.1...+11.5 VDC,
-0.4...+23 mA with 500 Ω shunt
Input resistance > 2 MΩ
Source resistance input ≤ 500 Ω
of the input signal
Digital resolution 12-bit
Measurement accuracy at ±0.1 % of final value
25 °C, max.
Measurement accuracy on ±0.5 % of final value
full temperature range, max.
Temperature coefficient, ±0.011 %/K of final value
max.
Safety-related accuracy, ±2 % of final value
max
Measured value refresh once per cycle of the controller
Sampling time approx. 45 µs
Table 17: Specifications for the Analog inputs
Page 26 of 54 HI 800 161 E Rev. 1.01
F3 AIO 8/4 01 3 Product Description
Supply outputs
Number of supply outputs 8
Nominal voltages 8.2 VDC / 26 VDC, switchable
Tolerance ±5%
Safely monitored limits
Range 8.2 V 7.6 V...8.8 V, (tolerance range: 7.3...9.1 V)
Range 26 V 24.3 V...27.7 V, (tolerance range: 24.0...28.0 V)
Current limiting > 200 mA, the output is switched off
Table 18: Specifications for the Transmitter Supply
Analog Outputs
Number of outputs 4 non-galvanically isolated,
non-safety-related,
common safe shutdown
Nominal value 4...20 mA
Operating value 0...21 mA
Digital resolution 12-bit
Load impendance max. 600 Ω
Measurement accuracy at ±0.1 % of final value
25 °C, max.
Measurement accuracy on ±0.5 % of final value
full temperature range, max.
Temperature coefficient, ±0.011 %/K of final value
max.
Safety-related accuracy, ±1 % of final value
max
Table 19: Specifications for the Pulsed Outputs
3.6.1 Product Data F3 AIO 8/4 011 (-20 °C)
The HIMatrix F3 AIO 8/4 011 (-20 °C) model variant is intended for use at the extended
temperature range of -20…+60 °C. The electronic components are coated with a protective
lacquer.
General
Operating -20 °C...+60 °C
temperature
Weight approx. 0.95 kg
Table 20: Product Data of F3 AIO 8/4 011 (-20 °C)
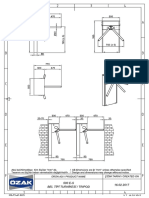
3.6.2 Product Data F3 AIO 8/4 012 (subsea / -20°C)
The HIMatrix F3 AIO 8/4 012 (subsea / -20°C) model variant is intended for subsea-use
according to ISO 13628 Part 6: Subsea production control systems. The electronic
components are coated with a protective lacquer. The enclosure of the remote I/O is made
of V2A stainless steel; the remote I/O is intended for mounting on a mounting plate. The
enclosure is equipped with a massive aluminum plate, see Figure 7. Figure 8 specifies the
centre hole distances.
HI 800 161 E Rev. 1.01 Page 27 of 54
3 Product Description F3 AIO 8/4 01
General
Enclosure material V2A stainless steel
Operating -20 °C...+60 °C
temperature
ISO 13628-6: 2006 Shock and vibration tests according to Level Q1 and Q2.
Random vibration test, ESS (environmental stress screening)
Max. dimensions Width: 207 mm (with enclosure screws)
(without connectors Height: 114 mm (with fixing bolt)
and aluminum plate) Depth: 97 mm (with earthing rail)
Dimensions: (200 x 160 x 6) mm
Aluminum plate
(W x H x D)
Weight approx. 1.4 kg
Table 21: Product Data of F3 AIO 8/4 012 (subsea / -20°C)
Figure 7: HIMatrix F3 AIO 8/4 01 012 (Subsea / -20°C) with Aluminum Plate
Page 28 of 54 HI 800 161 E Rev. 1.01
F3 AIO 8/4 01 3 Product Description
Figure 8: Aluminum Plate with Dimensions
3.7 Certified HIMatrix F3 AIO 8/4 01
HIMatrix F3 AIO 8/4 01
CE EMC, ATEX Zone 2
TÜV IEC 61508 1-7:2000 up to SIL 3
IEC 61511:2004
EN 954-1:1996 up to Cat. 4
TÜV ATEX 94/9/EG
EN 1127-1
EN 61508
UL Underwriters ANSI/UL 508, NFPA 70 – Industrial Control Equipment
Laboratories Inc. CSA C22.2 No.142
UL 1998 Software Programmable Components
NFPA 79 Electrical Standard for Industrial Machinery
IEC 61508
FM Approvals Class I, DIV 2, Groups A, B, C and D
Class 3600, 1998
Class 3611, 1999
Class 3810, 1989
Including Supplement #1, 1995
CSA C22.2 No 142
CSA C22.2 No 213
Table 22: Certified HIMatrix F3 AIO 8/4 01
HI 800 161 E Rev. 1.01 Page 29 of 54
4 Start-Up F3 AIO 8/4 01
4 Start-Up
To start up the remote I/O, it must be mounted, connected and configured in the
programming tool.
4.1 Installation and Mounting
The remote I/O is mounted on a 35 mm DIN rail (DIN) or a mounting plate in case of the
F3 AIO 8/4 012 (subsea / -20 °C).
4.1.1 Connecting the Analog Inputs
Use the following terminals to connect the analog inputs:
Terminal Designation Function (analog inputs AI)
1 S1 Transmitter supply 1
2 I1+ Analog input 1
3 I1- Ground
4 S2 Transmitter supply 2
5 I2+ Analog input 2
6 I2- Ground
Terminal Designation Function (analog inputs AI)
7 S3 Transmitter supply 3
8 I3+ Analog input 3
9 I3- Ground
10 S4 Transmitter supply 4
11 I4+ Analog input 4
12 I4- Ground
Terminal Designation Function (analog inputs AI)
13 S5 Transmitter supply 5
14 I5+ Analog input 5
15 I5- Ground
16 S6 Transmitter supply 6
17 I6+ Analog input 6
18 I6- Ground
Terminal Designation Function (analog inputs AI)
19 S7 Transmitter supply 7
20 I7+ Analog input 7
21 I7- Ground
22 S8 Transmitter supply 8
23 I8+ Analog input 8
24 I8- Ground
Table 23: Terminal Assignment for the Analog Inputs
Only shielded cables with a maximum length of 300 m should be connected to the inputs.
i The shielding must be connected to the remote I/O and the sensor housing and earthed on
one end to the remote I/O side to form a Faraday cage.
Page 30 of 54 HI 800 161 E Rev. 1.01
F3 AIO 8/4 01 4 Start-Up
4.1.1.1 Shunt Adapter
The shunt adapter is a plug-in module for the analog inputs of the safety-related remote I/O
F3 AIO 8/4 01.
Five variants are available:
Model Equipment Part no.
Z 7301 250 Ω shunt 98 2220059
Z 7302 500 Ω shunt 98 2220067
Z 7306 250 Ω shunt 98 2220115
Overvoltage protection
HART series resistor (current limiting)
Z 7308 Voltage divider 98 2220137
Overvoltage protection
Z 7309 1) 500 Ω shunt 98 2220177
1)
If proximity switches are connected, see Chapter 4.5.1
Table 24: Shunt Adapter
Refer to the corresponding manuals for further information on the shunt adapters.
4.1.2 Connecting the Analog Outputs
Use the following terminals to connect the analog outputs:
Terminal Designation Function (analog outputs AO)
25 1+ Analog output 1
26 1- Ground output 1
27 2+ Analog output 2
28 2- Ground output 2
29 3+ Analog output 3
30 3- Ground output 3
31 4+ Analog output 4
32 4- Ground output 4
Table 25: Terminal Assignment for the Analog Outputs
HI 800 161 E Rev. 1.01 Page 31 of 54
4 Start-Up F3 AIO 8/4 01
4.1.3 Mounting the F3 AIO 8/4 01 in Zone 2
(EC Directive 94/9/EC, ATEX)
The remote I/O is suitable for mounting in zone 2. Refer to the corresponding declaration of
conformity available on the HIMA website.
When mounting the device, observe the special conditions specified in the following
section.
Special Conditions X
1. Mount the remote I/O in an enclosure that meets the EN 60079-15 requirements and
achieves a type of protection of at least IP54, in accordance with EN 60529. Provide the
enclosure with the following label:
Work is only permitted in the de-energized state
Exception:
If a potentially explosive atmosphere has been precluded, work can be also performed
when the device is under voltage.
2. The enclosure in use must be able to safely dissipate the generated heat. The power
dissipation of the module F3 AIO 8/4 01 is 18 W at maximum.
3. Protect the HIMatrix F3 AIO 8/4 01 with a 10 A time-lag fuse.
The remote I/O must be supplied with 24 VDC from a power supply unit with safe
isolation. Use only power supply units of type PELV or SELV.
4. Applicable standards:
VDE 0170/0171 Part 16, DIN EN 60079-15: 2004-5
VDE 0165 Part 1, DIN EN 60079-14: 1998-08
Pay particular attention to the following sections:
DIN EN 60079-15:
Chapter 5 Design
Chapter 6 Terminals and cabling
Chapter 7 Air and creeping distances
Chapter 14 Connectors
DIN EN 60079-14:
Chapter 5.2.3 Equipment for use in zone 2
Chapter 9.3 Cabling for zones 1 and 2
Chapter 12.2 Equipment for zones 1 and 2
The remote I/O is additionally equipped with the represented label:
Figure 9: Label for Ex Conditions
Page 32 of 54 HI 800 161 E Rev. 1.01
F3 AIO 8/4 01 4 Start-Up
4.2 Configuration
The remote I/O can be configured using a programming tool, SILworX or ELOP II Factory.
Which programming tool should be used, depends on the revision status of the operating
system (firmware):
ELOP II Factory is required for operating system versions prior to 7.
SILworX is required for operating system version 7 and beyond.
ELOP II Factory is required to load a new operating system (version 7 and beyond) into a
i remote I/O with a CPU operating system version prior to 7. SILworX is then required once
the loading procedure is completed.
4.3 Configuring a Remote I/O with SILworX
In the Hardware Editor, the remote I/Os are represented like a base plate equipped with the
following modules:
Processor module (CPU)
Input module (AI 8)
Output module (AO 4)
Double-click the module to open the Detail View with the corresponding tabs. The tabs are
used to assign the global variables configured in the user program to the system variables
of the corresponding module.
4.3.1 Parameters and Error Codes for the Inputs and Outputs
The following tables specify the system parameters that can be read and set for the inputs
and outputs, including the corresponding error codes.
In the user program, the error codes can be read using the variables assigned within the
logic.
The error codes can also be displayed in SILworX.
HI 800 161 E Rev. 1.01 Page 33 of 54
4 Start-Up F3 AIO 8/4 01
4.3.2 Analog Inputs F3 AIO 8/4 01
The following tables present the statuses and parameters for the input module (AI 8) in the
same order as given in the Hardware Editor.
4.3.2.1 Module Tab
The Module tab contains the following system parameters.
System parameter Data type R/W Description
AI.Error Code WORD R Error codes for all analog inputs
Coding Description
0x0001 Fault within the digital inputs
0x0002 FTT test of test pattern faulty
Module.Error Code WORD R Module error code
Coding Description
0x0000 I/O processing, if required with
errors, see other error codes
0x0001 No I/O processing (CPU not in
RUN)
0x0002 No I/O processing during the
booting test
0x0004 Manufacturer interface operating
0x0010 No I/O processing: incorrect
configuration
0x0020 No I/O processing: fault rate
exceeded
0x0040/ No I/O processing: configured
0x0080 module not plugged in
Module.SRS UDINT R Slot number (System Rack Slot)
Module.Type UINT R Type of module, target value: 0x00A5 [165dec]
Transmitter Voltage[01] USINT W Switching of the transmitter supply for each group:
1 = 8.2 V
2 = 26.0 V
Transmitter.Error Code WORD R Error codes for the transmitter unit
Coding Description
0x0001 Fault in the transmitter supply
0x0400 FTT test 1: Temperature threshold
exceeded
0x0800 FTT test 2: Temperature threshold
exceeded
Transmitter[01].Error Code BYTE R Error codes for each transmitter group
Coding Description
0x01 Module fault of transmitter supply
0x02 Overcurrent of transmitter supply
0x04 Low voltage of transmitter supply.
0x08 Overvoltage of transmitter supply.
Table 26: SILworX - System Parameters for the Analog Inputs, Module Tab
Page 34 of 54 HI 800 161 E Rev. 1.01
F3 AIO 8/4 01 4 Start-Up
4.3.2.2 AI 8: Channels Tab
The AI 8: Channels tab contains the following system variables.
System Data R/W Description
parameter type
-> Error Code BYTE R Error codes for the analog input channels
[BYTE] Coding Description
0x01 Fault in the analog input module
0x02 Out of the defined limit values.
0x04 A/D converter faulty, measured values invalid
0x08 Measured value out of the safety-related
accuracy
0x10 Measured value overflow
0x20 Channel not operating
0x40 Address error of both A/D converters
-> Value [INT] INT R Analog value for each channel [INT] from 0...+2000 (0...+10 V).
The validity depends on AI.Error Code.
Channel Used BOOL W Channel configuration:
[BOOL] -> 1 = operating
0 = not operating
Limit Value LOW INT W Voltage range upper limit for low level -> Underflow [BOOL]
[INT] ->
Limit Value HIGH INT W Voltage range low limit for high level -> Overflow [BOOL]
[INT] ->
Transmitter BOOL W AI channel used with transmitter supply:
Used [BOOL] -> 1 = used
0 = not used
-> Underflow BOOL R Underflow -> Value [INT] in accordance with Limit Value LOW
[BOOL] [INT] ->
The validity depends on AI.Error Code
-> Overflow BOOL R Overflow -> Value [INT] in accordance with Limit Value HIGH
[BOOL] [INT] ->
The validity depends on AI.Error Code
Table 27: SILworX - System Parameters for the Analog Inputs, AI 8: Channels Tab
HI 800 161 E Rev. 1.01 Page 35 of 54
4 Start-Up F3 AIO 8/4 01
4.3.3 Analog Outputs F3 AIO 8/4 01
The following tables present the statuses and parameters for the output module (AO 4) in
the same order as given in the Hardware Editor.
4.3.3.1 Module Tab
The Module tab contains the following system parameters.
System parameter Data R/W Description
type
AO.Error Code WORD R Error codes for all analog outputs
Coding Description
0x0001 Module fault.
0x0002 MOT test: Safety switch 1 faulty
0x0004 MOT test: Safety switch 2 faulty
0x0008 FTT test of test pattern faulty
0x0010 FTT test: Error while checking coefficients
0x0400 FTT test: 1st temperature threshold
exceeded
0x0800 FTT test: 2nd temperature threshold
exceeded
0x2000 MOT test: status of safety switches
0x4000 MOT test: active shutdown via watchdog
faulty
Module.Error Code WORD R Module error code
Coding Description
0x0000 I/O processing, if required with errors, see
other error codes
0x0001 No I/O processing (CPU not in RUN)
0x0002 No I/O processing during the booting test
0x0004 Manufacturer interface operating
0x0010 No I/O processing: incorrect configuration
0x0020 No I/O processing: fault rate exceeded
0x0040/ No I/O processing: configured module not
0x0080 plugged in
Module.SRS UDINT R Slot number (System Rack Slot)
Module.Type UINT R Type of module, target value: 0x0069 [105dec]
Table 28: SILworX - System Parameters for the Analog Outputs, Module Tab
Page 36 of 54 HI 800 161 E Rev. 1.01
F3 AIO 8/4 01 4 Start-Up
4.3.3.2 AO 8: Channels Tab
The AO 8: Channels tab contains the following system parameters.
System Data R/W Description
parameter type
-> Error Code BYTE R Error codes for the analog output channels
[BYTE] Coding Description
0x01 Fault in the analog output unit
0x80 -> Value [INT] out of the specified range
-> Value [INT] INT R Output value of AO channels:
Current characteristic curve: 0...+2000 (0 mA...+20 mA)
Current characteristic curve: -2000...0 (0 mA)
Before being normalized, the values are checked for
plausibility.
Current characteristic curve:
- Values < 0:
are normalized to 0
-Values < intermediate data point LOW:
Normalization with intermediate data point LOW
-Values > intermediate data point HIGH:
Normalization with intermediate data point HIGH
Outputs must not be used as safety-related outputs!
Channel Used BOOL W Channel configuration:
[BOOL] 1 = operating
0 = not operating
Table 29: SILworX - System Parameters for the Analog Outputs, AO 8: Channels Tab
4.4 Configuring a Resource Using ELOP II Factory
4.4.1 Configuring the Inputs and Outputs
The signals previously defined in the Signal Editor (Hardware Management) are assigned
to the individual channels (inputs and outputs) using ELOP II Factory. Refer to the System
Manual for Compact Systems or the online help for more details.
The system signals available for allocating signals in the remote I/Os are described in the
following chapter.
4.4.2 Signals and Error Codes for the Inputs and Outputs
The following tables specify the system signals that can be read and set for the inputs and
outputs, including the corresponding error codes.
In the user program, the error codes can be read using the signals assigned within the
logic.
The error codes can also be displayed in ELOP II Factory.
HI 800 161 E Rev. 1.01 Page 37 of 54
4 Start-Up F3 AIO 8/4 01
4.4.3 Analog Inputs F3 AIO 8/4 01
System Signal R/W Description
Mod.SRS [UDINT] R Slot number (System Rack Slot)
Mod. Type [UINT] R Type of module, target value: 0x001E [30dec]
Mod. Error Code R Module error code
[WORD] Coding Description
0x0000 I/O processing, if required with errors, see other error
codes
0x0001 No I/O processing (CPU not in RUN)
0x0002 No I/O processing during the booting test
0x0004 Manufacturer interface operating
0x0010 No I/O processing: incorrect configuration
0x0020 No I/O processing: fault rate exceeded
0x0040/ No I/O processing: configured module not plugged in
0x0080
AI.Error Code R Error codes for all analog inputs
[WORD] Coding Description
0x0001 Module fault.
0x0004 MOT test: time monitoring of conversion
0x0008 FTT test: Walking bit of data bus faulty
0x0010 FTT test: Error while checking coefficients
0x0020 FTT test: Operating voltages faulty
0x0040 A/D conversion faulty (DRDY_LOW)
0x0080 MOT test: Cross links of MUX faulty
0x0100 MOT test: Walking bit of data bus faulty
0x0200 MOT test: Multiplexer addresses faulty
0x0400 MOT test: Operating voltages faulty
0x0800 MOT test: Measuring system (characteristic) faulty
(unipolar)
0x1000 MOT test: Measuring system (final values, zero point)
faulty (unipolar)
0x8000 A/D conversion faulty (DRDY_HIGH)
AI[xx].Error Code R Error codes for the analog input channels
[BYTE] Coding Description
0x01 Fault in the analog input module
0x02 Out of the defined limit values.
0x04 A/D converter faulty, measured values invalid
0x08 Measured value out of the safety-related accuracy
0x10 Measured value overflow
0x20 Channel not operating
0x40 Address error of both A/D converters
AI[xx].Value R Analog value for each channel [INT] from 0...+2000 (0...+10 V).
[INT] The validity depends on AI[xx].Error Code
AI[xx].Used [BOOL] W Channel configuration:
1 = operating
0 = not operating
AI[xx].Transmitter W AI channel used with transmitter supply:
Used 1 = used
[BOOL] 0 = not used
Transmitter W Switching of the transmitter supply for each group:
Voltage[01] [USINT] 1 = 8.2 V
2 = 26.0 V
Page 38 of 54 HI 800 161 E Rev. 1.01
F3 AIO 8/4 01 4 Start-Up
System Signal R/W Description
Transmitter. R Error codes for the transmitter unit
Error Code [WORD] Coding Description
0x0001 Fault in the transmitter supply
0x0400 FTT test 1: Temperature threshold exceeded
0x0800 FTT test 2: Temperature threshold exceeded
Transmitter[01]. R Error codes for each transmitter group
Error Code [BYTE] Coding Description
0x01 Module fault of transmitter supply
0x02 Overcurrent of transmitter supply
0x04 Low voltage of transmitter supply.
0x08 Overvoltage of transmitter supply.
AI[xx].Underflow R Underflow AI[INT].Value in accordance with AI[xx].Limit Value LOW
[BOOL] The validity depends on AI[xx].Error Code
AI[xx].Overflow R Overflow AI[INT].Value in accordance with AI[xx].Limit Value HIGH
[BOOL] The validity depends on AI[xx].Error Code
AI[xx].Limit Value W Voltage range upper limit for low level AI[xx].Underflow
LOW
[INT]
AI[xx].Limit Value W Voltage range low limit for high level AI[xx].Overflow
HIGH
[INT]
Table 30: ELOP II Factory - System Signals for the Analog Inputs
HI 800 161 E Rev. 1.01 Page 39 of 54
4 Start-Up F3 AIO 8/4 01
4.4.4 Analog Outputs F3 AIO 8/4 01
System Signal R/W Description
Mod.SRS [UDINT] R Slot number (System Rack Slot)
Mod. Type [UINT] R Type of module, target value: 0x0069 [105dec]
Mod. Error Code R Module error code
[WORD] Coding Description
0x0000 I/O processing, if required with errors, see other error
codes
0x0001 No I/O processing (CPU not in RUN)
0x0002 No I/O processing during the booting test
0x0004 Manufacturer interface operating
0x0010 No I/O processing: incorrect configuration
0x0020 No I/O processing: fault rate exceeded
0x0040/ No I/O processing: configured module not plugged in
0x0080
AO.Error Code R Error codes for the analog output channels
[WORD] Coding Description
0x0001 Module fault.
0x0002 MOT test: Safety switch 1 faulty
0x0004 MOT test: Safety switch 2 faulty
0x0008 FTT test of test pattern faulty
0x0010 FTT test: Error while checking coefficients
0x0400 FTT test: 1st temperature threshold exceeded
0x0800 FTT test: 2nd temperature threshold exceeded
0x2000 MOT test: status of safety switches
0x4000 MOT test: active shutdown via watchdog faulty
AO[xx].Error Code R Error codes for the analog output channels
[BYTE] Coding Description
0x01 Fault in the analog output unit
0x80 AO [0x].Value out of specified range
AO[xx].Value [BOOL] W Output value of AO channels:
Current characteristic curve: 0...+2000 (0 mA...+20 mA)
Current characteristic curve: -2000...0 (0 mA)
Before being normalized, the values are checked for plausibility.
Current characteristic curve:
- Values < 0:
are normalized to 0
-Values < intermediate data point LOW:
Normalization with intermediate data point LOW
-Values > intermediate data point HIGH:
Normalization with intermediate data point HIGH
Outputs must not be used as safety-related outputs!
AO[x].Used [BOOL] W Channel configuration
1 = Channel operating
0 = Channel not operating
Table 31: ELOP II Factory - System Signals for the Analog Outputs
Page 40 of 54 HI 800 161 E Rev. 1.01
F3 AIO 8/4 01 4 Start-Up
4.5 Connection Variants
This chapter describes the correct wiring of the remote I/O in safety-related applications.
4.5.1 Connecting Proximity Switches
Proximity switches can be evaluated with the analog inputs using the wiring shown in
Figure 10.
The proximity switch is connected to its supply via the line resistor RL. Afterwards, it is
connected in series to the R1 resistor.
Proximity Switch F3 AIO 8/4 01 Remote I/O
Line Resistance of < 50 Ω Supply
Z 7309 Shunt Adapter Analog Input
R1 = 500 Ω Ground
Figure 10: Proximity Switch on Analog Inputs
Unshielded cables may be used (zone A, in accordance with EN 61131 – 2: 2007).
i Shielded cables must be used if the system is located in a hostile EMC environment (zone
B or C). The shielding must be earthed by attaching it to the shroud.
HI 800 161 E Rev. 1.01 Page 41 of 54
4 Start-Up F3 AIO 8/4 01
NOTE
Overload, failure due to improperly set voltage (8.2 V / 26 V)!
Failure to comply with these instructions can damage the electronic components.
Prior to start-up, set the Transmitter Supply[01] system parameter to 1 (8.2 V). If the
shunt adapter has been overloaded, it must be replaced.
4.5.1.1 Limits to Configure in the User Program
The following values concerning a final value of 2000 digits, must be configured in the user
program. The line resistance has already been taken into account with the limits.
Standard values for the digital inputs
NAMUR proximity switches in Verify the values of the proximity switches actually in
accordance with EN 60947-5-6 use.
Switch-on threshold Low -> High 1.75 mA [175 digits]
Switch-off threshold High -> Low 1.55 mA [155 digits]
Open-circuit (LB) ≤ 0.200 mA [20 digits]
Short-circuit (LS) ≥ 10.86 mA [1086 digits]
SN / S1N proximity switches Verify the values of the proximity switches actually in
from P+F use.
Switch-on threshold Low -> High 2.45 mA [245 digits]
Switch-off threshold High -> Low 2.25 mA [225 digits]
Open-circuit ≤ 0.200 mA [20 digits]
Short-circuit ≥ 5.63 mA [563 digits]
Table 32: Standard Values for the Digital Inputs
Page 42 of 54 HI 800 161 E Rev. 1.01
F3 AIO 8/4 01 5 Operation
5 Operation
The remote I/O can only operate together with a controller. No specific monitoring is
required for remote I/Os.
5.1 Handling
Handling of the remote I/O during operation is not required.
5.2 Diagnosis
A first diagnosis results from evaluating the LEDs, see Chapter 3.5.1.
The device's diagnostic history can also be read using the programming tool.
HI 800 161 E Rev. 1.01 Page 43 of 54
6 Maintenance F3 AIO 8/4 01
6 Maintenance
No maintenance measures are required during normal operation.
If a device or module fails, it must be replaced with a faultless device or module of the
same type or with an approved replacement model.
Only the manufacturer is authorized to repair the device/module.
6.1 Faults
Refer to Chapter 3.1.1.1, for more information on the fault reaction of inputs.
Refer to Chapter 3.2, for more information on the fault reaction of the outputs.
6.1.1 Operating System Version 6.42 and Beyond
If the test harnesses detect faults in the processor system, the remote I/O enters the
STOP_INVALID state and is restarted (RUN state) by the associated controller. If a further
internal fault occurs within the first minute after start-up, the device enters the
STOP_INVALID state and will remain in this state. This means that the input signals are no
longer processed by the device and the outputs switch to the de-energized, safe state. The
evaluation of diagnostics provides information on the fault cause.
6.1.2 Operating System Versions Prior to 6.42
If the test harnesses detect faults in the processor system, the module automatically enters
the ERROR STOP state and will remain in this state. This means that the input signals are
no longer processed by the device and the outputs switch to the de-energized, safe state.
The evaluation of diagnostics provides information on the fault cause.
6.2 Maintenance Measures
The following measures are required for the processor module:
Loading the operating system, if a new version is required
Executing the proof test
6.2.1 Loading the Operating System
HIMA is continuously improving the operating system of the devices. HIMA recommends to
use system downtimes to load a current version of the operating system into the devices.
Refer to the release list to check the consequences of the new operation system version on
the system!
Load the operating system using the programming tool.
Prior to loading the operating system, the device must be in STOP (displayed in the
programming tool). Otherwise, stop the device.
For more information, refer to the programming tool documentation.
6.2.2 Proof Test
Test the HIMatrix devices and modules every 10 years. For more information, refer to the
Safety Manual (HI 800 003 E).
Page 44 of 54 HI 800 161 E Rev. 1.01
F3 AIO 8/4 01 7 Decommissioning
7 Decommissioning
Remove the supply voltage to decommission the device. Afterwards pull out the pluggable
screw terminal connector blocks for inputs and outputs and the Ethernet cables.
HI 800 161 E Rev. 1.01 Page 45 of 54
8 Transport F3 AIO 8/4 01
8 Transport
To avoid mechanical damage, HIMatrix components must be transported in packaging.
Always store HIMatrix components in their original product packaging. This packaging also
provides protection against electrostatic discharge. Note that the product packaging alone
is not suitable for transmission.
Page 46 of 54 HI 800 161 E Rev. 1.01
F3 AIO 8/4 01 9 Disposal
9 Disposal
Industrial customers are responsible for correctly disposing of decommissioned HIMatrix
hardware. Upon request, a disposal agreement can be arranged with HIMA.
All materials must be disposed of in an ecologically sound manner.
HI 800 161 E Rev. 1.01 Page 47 of 54
9 Disposal F3 AIO 8/4 01
Page 48 of 54 HI 800 161 E Rev. 1.01
F3 AIO 8/4 01 Appendix
Appendix
Glossary
Term Description
ARP Address Resolution Protocol: Network protocol for assigning the network addresses
to hardware addresses
AI Analog Input
COM COMmunication module
CRC Cyclic Redundancy Check
DI Digital Input
DO Digital Output
ELOP II Factory Programming tool for HIMatrix systems
EMC ElectroMagnetic Compatibility
EN European Norm
ESD ElectroStatic Discharge
FB FieldBus
FBD Function Block Diagrams
FTA Field Termination Assembly
FTT Fault Tolerance Time
ICMP Internet Control Message Protocol: Network protocol for status or error messages
IEC International Electrotechnical Commission
MAC address Media Access Control address: Hardware address of one network connection
PADT Programming And Debugging Tool (in accordance with IEC 61131-3),
PC with SILworX or ELOP II Factory
PE Protective Earth
PELV Protective Extra Low Voltage
PES Programmable Electronic System
PFD Probability of Failure on Demand, probability of failure on demand of a safety
function
PFH Probability of Failure per Hour, probability of a dangerous failure per hour
R Read: The system variable or signal provides value, e.g., to the user program
Rack ID Base plate identification (number)
Non-reactive Supposing that two input circuits are connected to the same source (e.g., a
transmitter). An input circuit is termed non-reactive if it does not distort the signals
of the other input circuit.
R/W Read/Write (column title for system variable/signal type)
SB System Bus (module)
SELV Safety Extra Low Voltage
SFF Safe Failure Fraction, portion of safely manageable faults
SIL Safety Integrity Level (in accordance with IEC 61508)
SILworX Programming tool for HIMatrix systems
SNTP Simple Network Time Protocol (RFC 1769)
S.R.S System.Rack.Slot addressing of a module
SW Software
TMO TiMeOut
W Write: System variable/signal is provided with value, e.g., from the user program
WD WatchDog: Time monitoring for modules or programs. If the watchdog time is
exceeded, the module or program enters the ERROR STOP state.
WDT WatchDog Time
HI 800 161 E Rev. 1.01 Page 49 of 54
Appendix F3 AIO 8/4 01
Index of Figures
Figure 1: Circuitry for Line Monitoring 13
Figure 2: Application Example for Safety-Related Analog Outputs 17
Figure 3: Sample Type Label 19
Figure 4: Front View 20
Figure 5: Block Diagram 20
Figure 6: Sample MAC Address Label 24
Figure 7: HIMatrix F3 AIO 8/4 01 012 (Subsea / -20°C) with Aluminum Plate 28
Figure 8: Aluminum Plate with Dimensions 29
Figure 9: Label for Ex Conditions 32
Figure 10: Proximity Switch on Analog Inputs 41
Page 50 of 54 HI 800 161 E Rev. 1.01
F3 AIO 8/4 01 Appendix
Index of Tables
Table 1: HIMatrix System Variants 5
Table 2: Additional Relevant Documents 6
Table 3: Environmental Requirements 9
Table 4: Input Values for the Analog Inputs 11
Table 5: Examples of Line Monitoring - Resistance Values 13
Table 6: Examples of Line Monitoring - Voltage Values 13
Table 7: Voltage Values with Line Monitoring of DO 14
Table 8: Example of Short-Circuit 15
Table 9: Output Values of the Analog Outputs 17
Table 10: Part Numbers 18
Table 11: Operating Voltage LED 21
Table 12: System LEDs 22
Table 13: Ethernet Indicators 23
Table 14: Ethernet Interfaces Properties 24
Table 15: Network Ports in Use 24
Table 16: Product Data 26
Table 17: Specifications for the Analog inputs 26
Table 18: Specifications for the Transmitter Supply 27
Table 19: Specifications for the Pulsed Outputs 27
Table 20: Product Data of F3 AIO 8/4 011 (-20 °C) 27
Table 21: Product Data of F3 AIO 8/4 012 (subsea / -20°C) 28
Table 22: Certified HIMatrix F3 AIO 8/4 01 29
Table 23: Terminal Assignment for the Analog Inputs 30
Table 24: Shunt Adapter 31
Table 25: Terminal Assignment for the Analog Outputs 31
Table 26: SILworX - System Parameters for the Analog Inputs, Module Tab 34
Table 27: SILworX - System Parameters for the Analog Inputs, AI 8: Channels Tab 35
Table 28: SILworX - System Parameters for the Analog Outputs, Module Tab 36
Table 29: SILworX - System Parameters for the Analog Outputs, AO 8: Channels Tab 37
Table 30: ELOP II Factory - System Signals for the Analog Inputs 39
Table 31: ELOP II Factory - System Signals for the Analog Outputs 40
Table 32: Standard Values for the Digital Inputs 42
HI 800 161 E Rev. 1.01 Page 51 of 54
Appendix F3 AIO 8/4 01
Index
diagnosis..................................................43 reset key .................................................. 25
fault reaction safeethernet............................................ 24
analog Inputs........................................12 specifications ........................................... 26
part number..............................................18 SRS ......................................................... 18
Page 52 of 54 HI 800 161 E Rev. 1.01
HI 800 161 E © by HIMA Paul Hildebrandt GmbH + Co KG
HIMA Paul Hildebrandt GmbH + Co KG
P.O. Box 1261
68777 Brühl, Germany
Tel: +49 6202 709-0
Fax: +49 6202 709-107
(1025) E-mail: info@hima.com Internet: www.hima.com
You might also like
- IT6000E Technical ManualDocument72 pagesIT6000E Technical ManuallquickfallNo ratings yet
- It3000 Manual TecnicoDocument132 pagesIt3000 Manual TecnicoBraulio100% (2)
- Technical Manual: Industrial Weighing TerminalDocument72 pagesTechnical Manual: Industrial Weighing TerminalАнатолий ЖуровNo ratings yet
- Fabian HFO SM 113010.02EN V2.0 20180829Document129 pagesFabian HFO SM 113010.02EN V2.0 20180829Anne Stephany Zambrano86% (7)
- GEA IO 4 - Instruction Manual - 2017Document174 pagesGEA IO 4 - Instruction Manual - 2017Centrifugal Separator100% (3)
- Operating Manual Extruder MEV4 (Rev1.0)Document156 pagesOperating Manual Extruder MEV4 (Rev1.0)Wing ZenandNo ratings yet
- Service Manual 2.540105a en CS-200 Excellence ErgoSpiroDocument72 pagesService Manual 2.540105a en CS-200 Excellence ErgoSpiroHamdi ArmaganNo ratings yet
- Cyclic Interrupt (OB30)Document3 pagesCyclic Interrupt (OB30)khaldoun samiNo ratings yet
- 2) C1 Quadratic FunctionsDocument33 pages2) C1 Quadratic FunctionsIshy HereNo ratings yet
- Periodic Table TestDocument5 pagesPeriodic Table TestRica RoscoNo ratings yet
- Himatrix: F30 ManualDocument54 pagesHimatrix: F30 ManualMarcos JavierNo ratings yet
- Himatrix: F30 03 ManualDocument46 pagesHimatrix: F30 03 Manualenggar kalfianaNo ratings yet
- X Di 32 05 - Katalog78516Document56 pagesX Di 32 05 - Katalog78516PatrickNo ratings yet
- HIMax System ManualDocument122 pagesHIMax System ManualIsmail ShahidNo ratings yet
- Documentation PLC Controller PFC200Document424 pagesDocumentation PLC Controller PFC200guiller7No ratings yet
- Abb Temprature txTTF300-EN-B-04 - 2010Document78 pagesAbb Temprature txTTF300-EN-B-04 - 2010ABHAYNo ratings yet
- HT80C51 User Manual: Handshake SolutionsDocument132 pagesHT80C51 User Manual: Handshake SolutionsspotNo ratings yet
- m07508207 XXXXXXXX 0 enDocument424 pagesm07508207 XXXXXXXX 0 enStefan BusoiNo ratings yet
- Service Manual multiEA4000 HTS1500 enDocument49 pagesService Manual multiEA4000 HTS1500 enpramodyad5810No ratings yet
- VortexDocument136 pagesVortexLuis Felipe Turriate AlvaradoNo ratings yet
- KippZonen Manual Datalogger COMBILOG1022 V104 PDFDocument173 pagesKippZonen Manual Datalogger COMBILOG1022 V104 PDFHaimeNo ratings yet
- I SHDocument92 pagesI SHPhátTrầnNo ratings yet
- Buchholz Relay (RR Series GQ Series) Operating Instructions 10309636 00 enDocument59 pagesBuchholz Relay (RR Series GQ Series) Operating Instructions 10309636 00 enLeonel BermudezNo ratings yet
- Wago-I/O-System 750: ManualDocument46 pagesWago-I/O-System 750: ManualHaris bayu kurniawanNo ratings yet
- 9740440049a EN P8000 ServiceDocument66 pages9740440049a EN P8000 ServicePyl MercadeoNo ratings yet
- Wago 852-1102 User ManualDocument36 pagesWago 852-1102 User ManualIgnatius MidhunNo ratings yet
- PD OperaManC400 Us0811Document58 pagesPD OperaManC400 Us0811Hamed YazidiNo ratings yet
- FRED PA 1 User ManualDocument60 pagesFRED PA 1 User ManualsantiagoNo ratings yet
- X Base Plate - Katalog40463Document52 pagesX Base Plate - Katalog40463Roberto FinaNo ratings yet
- m07500362 XXXXXXXX 0enDocument296 pagesm07500362 XXXXXXXX 0enDavid GERARDNo ratings yet
- Scansonic TH6 Manual enDocument98 pagesScansonic TH6 Manual en532110007No ratings yet
- Instruction Manual: Model Order NoDocument53 pagesInstruction Manual: Model Order NoNgurah S. YasaNo ratings yet
- Alldos Pump ManualDocument76 pagesAlldos Pump Manualvikas_etoNo ratings yet
- HI 800 105 E H41qH51q Operating System ManualDocument98 pagesHI 800 105 E H41qH51q Operating System ManualBehar Mohamed100% (1)
- WAGO-I/O-System 750-882 ManualDocument450 pagesWAGO-I/O-System 750-882 ManualDavid CieloNo ratings yet
- Eurotherm DetailsDocument88 pagesEurotherm DetailsMugesh DhasonNo ratings yet
- Interface Descriptioin JUMO DigiLineDocument52 pagesInterface Descriptioin JUMO DigiLineNatiqNo ratings yet
- Mapp 500Document317 pagesMapp 500rakesh hirparaNo ratings yet
- WAGO I/O System 750: ManualDocument342 pagesWAGO I/O System 750: Manualrahul.adityaNo ratings yet
- 113003.en v5.1.x 2019 Fabian Hfo Ifu PDFDocument178 pages113003.en v5.1.x 2019 Fabian Hfo Ifu PDFLeevan BauNo ratings yet
- Fcu2000 4Document100 pagesFcu2000 4Marius Adrian RaducanNo ratings yet
- SP500 Manual ENDocument51 pagesSP500 Manual ENassistenteintegradorNo ratings yet
- Wolf HD Endocam - User ManualDocument56 pagesWolf HD Endocam - User ManualAhmed 771000303No ratings yet
- 08-ELOP II V4.1 First Steps Manual PDFDocument116 pages08-ELOP II V4.1 First Steps Manual PDFwanto7050% (2)
- JUMO Quantrol LC100/LC200/LC300: Universal PID Controller SeriesDocument40 pagesJUMO Quantrol LC100/LC200/LC300: Universal PID Controller SeriesmikeNo ratings yet
- MN04802004Z enDocument79 pagesMN04802004Z encoldebelladNo ratings yet
- FCU 2000-1 Series FluidControl Unit Operating and Maintenance Instructions EN V 3.22 Up 3116140dDocument92 pagesFCU 2000-1 Series FluidControl Unit Operating and Maintenance Instructions EN V 3.22 Up 3116140dMehmet MısırNo ratings yet
- D02IB011EN-E MCP100 150 ManualDocument88 pagesD02IB011EN-E MCP100 150 Manualzitouniianis20% (1)
- R67068.0002 2 HB Profibus-Schnittstelle en KueblerDocument42 pagesR67068.0002 2 HB Profibus-Schnittstelle en KueblerSabari StunnerNo ratings yet
- It3000e Ex222 TheDocument128 pagesIt3000e Ex222 TheАнатолий ЖуровNo ratings yet
- buchholts relayDocument67 pagesbuchholts relaymhnasirriNo ratings yet
- Manual Servicio Eng - RevBDocument86 pagesManual Servicio Eng - RevBjean pierre fernandez villegasNo ratings yet
- isoPV D00024 M XXENDocument72 pagesisoPV D00024 M XXENHamza IssaouiNo ratings yet
- Wago Pfc200maneDocument460 pagesWago Pfc200maneGaurav BhardwajNo ratings yet
- Michell Instruments TDL600 Operating ManualDocument88 pagesMichell Instruments TDL600 Operating ManualEduard LebedevNo ratings yet
- H8S, H8/300 Series Cross AssemblerDocument289 pagesH8S, H8/300 Series Cross AssemblerThanh TrụNo ratings yet
- 00f4lebk300 PDFDocument108 pages00f4lebk300 PDFDull RahimNo ratings yet
- m07508214-00000000-0enDocument540 pagesm07508214-00000000-0endttNo ratings yet
- HI 801 003 E HIMax Safety ManualDocument66 pagesHI 801 003 E HIMax Safety ManualanoopmishrahitachistsNo ratings yet
- 32 H 8 IDocument88 pages32 H 8 IAnonymous Cv0l27No ratings yet
- Immulite 2000 Automated Immunoassay System: Service ManualDocument230 pagesImmulite 2000 Automated Immunoassay System: Service Manualşaban günerNo ratings yet
- Circuit breaker testDocument1 pageCircuit breaker testkhaldoun samiNo ratings yet
- Flame Detection - Flame Detection - 02.01.2020 - Saval - NL - enDocument1 pageFlame Detection - Flame Detection - 02.01.2020 - Saval - NL - enkhaldoun samiNo ratings yet
- AFCI TI en 10Document7 pagesAFCI TI en 10khaldoun samiNo ratings yet
- 500es Teknik Resim Technical DrawingDocument1 page500es Teknik Resim Technical Drawingkhaldoun samiNo ratings yet
- VMXB Soft Start PackagesDocument11 pagesVMXB Soft Start Packageskhaldoun samiNo ratings yet
- Toshiba Te Series StartupDocument38 pagesToshiba Te Series Startupkhaldoun samiNo ratings yet
- ENI-10 - 11 Network Interface Module Hardware Installation Manual. Revision B - AV July, 2003Document14 pagesENI-10 - 11 Network Interface Module Hardware Installation Manual. Revision B - AV July, 2003khaldoun samiNo ratings yet
- MAG8000Document23 pagesMAG8000khaldoun samiNo ratings yet
- CD 600 PlumeDocument196 pagesCD 600 Plumekhaldoun samiNo ratings yet
- Himatrix SeriesDocument110 pagesHimatrix Serieskhaldoun samiNo ratings yet
- Technical Data Sheet: Hlx-Nel (Narrow Edge Leading)Document3 pagesTechnical Data Sheet: Hlx-Nel (Narrow Edge Leading)khaldoun samiNo ratings yet
- Cooper Medc Datasheet dsmc0022c xb15Document2 pagesCooper Medc Datasheet dsmc0022c xb15khaldoun samiNo ratings yet
- Lcmass 100-140TDSDocument28 pagesLcmass 100-140TDSkhaldoun samiNo ratings yet
- Cooper Medc Schematics Wiring xb15 Ul 276 160Document1 pageCooper Medc Schematics Wiring xb15 Ul 276 160khaldoun samiNo ratings yet
- Turbine Meters For Crude Oil Measurement: BackgroundDocument4 pagesTurbine Meters For Crude Oil Measurement: Backgroundkhaldoun samiNo ratings yet
- Quick Exh Valves 13QS40 - 41 - 80 Rev 0110Document2 pagesQuick Exh Valves 13QS40 - 41 - 80 Rev 0110khaldoun samiNo ratings yet
- Electrical & Engineering Supplies LTD.: Sales@expresselectrical - Co.ukDocument2 pagesElectrical & Engineering Supplies LTD.: Sales@expresselectrical - Co.ukkhaldoun samiNo ratings yet
- Positive Displacement Spur Gear Flow MeterDocument2 pagesPositive Displacement Spur Gear Flow Meterkhaldoun samiNo ratings yet
- Pub 50001Document10 pagesPub 50001khaldoun samiNo ratings yet
- 110 Differential Pressure ValveDocument2 pages110 Differential Pressure Valvekhaldoun samiNo ratings yet
- ls3200 Point Level SwitchDocument2 pagesls3200 Point Level Switchkhaldoun samiNo ratings yet
- Scheduling With Release Times and Deadlines: Jan ElffersDocument64 pagesScheduling With Release Times and Deadlines: Jan Elfferskhaldoun samiNo ratings yet
- Studio 5000™ Logix Designer Level 3: Project Development: Course Number: CCP 143Document1 pageStudio 5000™ Logix Designer Level 3: Project Development: Course Number: CCP 143khaldoun samiNo ratings yet
- A Novel Control Strategy For An Ammonia PDFDocument8 pagesA Novel Control Strategy For An Ammonia PDFkhaldoun samiNo ratings yet
- New Updated Oracle 10g DBA Interview QuestionsDocument42 pagesNew Updated Oracle 10g DBA Interview QuestionsPrema LingamNo ratings yet
- TM I RangeDocument3 pagesTM I RangeJózsef JuhászNo ratings yet
- ch5 CPU SchedulingDocument72 pagesch5 CPU SchedulingIlham HafizNo ratings yet
- How To Critically Appraise A PaperDocument6 pagesHow To Critically Appraise A PaperAmbar RahmanNo ratings yet
- Avl Fuelexact Mass Flow&pluDocument2 pagesAvl Fuelexact Mass Flow&pluDEEPAK S SEC 2020No ratings yet
- Ionic Bonds (Handout), Class-6 PDFDocument1 pageIonic Bonds (Handout), Class-6 PDFKazi Tasfia RodoshiNo ratings yet
- Pages From 432912277-Manual-Air-Compresor-Atlas Copco-GA75-2-12Document5 pagesPages From 432912277-Manual-Air-Compresor-Atlas Copco-GA75-2-12Tolias EgwNo ratings yet
- DBMSDocument22 pagesDBMSnavneetkumar1800242No ratings yet
- IQML User GuideDocument225 pagesIQML User Guidekewoho2000No ratings yet
- Automatic Traffic Light ControllerDocument35 pagesAutomatic Traffic Light ControllerAmamhossain50% (2)
- SP3D Structure Users GuideDocument344 pagesSP3D Structure Users GuideGandul Sin Salsa100% (2)
- AmdcpuchartDocument20 pagesAmdcpuchartRene CleberNo ratings yet
- Simple Linear Regression and CorrelationDocument50 pagesSimple Linear Regression and CorrelationtesfuNo ratings yet
- Certificate of Calibration: Daniel NortonDocument1 pageCertificate of Calibration: Daniel NortonDiegoCastroNo ratings yet
- Endterm 1 Review SLIDESDocument38 pagesEndterm 1 Review SLIDESphamythienan.6a4.05No ratings yet
- Library Management System OnlineDocument39 pagesLibrary Management System Online1214 - MILLAN, CARLO, LNo ratings yet
- Java 1 Basic Syntax and SemanticsDocument135 pagesJava 1 Basic Syntax and SemanticsdelgadozerpaNo ratings yet
- الرِّواية العَربيّة بين الحَقِيقَة التَّاريخِيّة وتَعدُّدِ الرُّؤى رواية فردقان اعتقال الشّيخ الرَّئيس ليوسف زيدان أنموذDocument20 pagesالرِّواية العَربيّة بين الحَقِيقَة التَّاريخِيّة وتَعدُّدِ الرُّؤى رواية فردقان اعتقال الشّيخ الرَّئيس ليوسف زيدان أنموذVoxproduction vox donNo ratings yet
- ADS Matching and OptimizationDocument18 pagesADS Matching and OptimizationThanhha NguyenNo ratings yet
- Fiveable AP Chem Cram ChartDocument1 pageFiveable AP Chem Cram ChartkeipherNo ratings yet
- Operating Instructions For Electromagnetic Flowmeter Model: MIMDocument69 pagesOperating Instructions For Electromagnetic Flowmeter Model: MIMZsolt BodóNo ratings yet
- AWHERO - Military Applications Brochure - Gen2020Document4 pagesAWHERO - Military Applications Brochure - Gen2020زين الدين مروانيNo ratings yet
- ElectrostaticDocument77 pagesElectrostaticMritunjay KumarNo ratings yet
- Chapter - 10 - Capital Budgeting DecisionsDocument17 pagesChapter - 10 - Capital Budgeting DecisionsVishwa ShahNo ratings yet
- QT Iii Iv Sem PDFDocument17 pagesQT Iii Iv Sem PDFdil. 1122100% (1)
- Ocsetup Cbs Install OEMHelpCustomizationDocument15 pagesOcsetup Cbs Install OEMHelpCustomizationYuswarni YusNo ratings yet
- Lecture 4 Passive, ModalsDocument16 pagesLecture 4 Passive, ModalsMadalina GeorgianaNo ratings yet
- ISO-7183-2007 Compressed Air Dryers Specs and TestingDocument30 pagesISO-7183-2007 Compressed Air Dryers Specs and TestingR LNo ratings yet