Paper Journal PDF
Paper Journal PDF
Download as pdf or txt
You might also like
- PUP Medical Health Information Form For Students 2022Document1 pagePUP Medical Health Information Form For Students 2022ReineirDuranNo ratings yet
- Industry Internship Report-11Document54 pagesIndustry Internship Report-11Satadeep Datta100% (3)
- Integrated Comfort Adaptive Cruise and Semi Active Suspension Control For An Autonomous Vehicle An LPV Approach PDFDocument25 pagesIntegrated Comfort Adaptive Cruise and Semi Active Suspension Control For An Autonomous Vehicle An LPV Approach PDFThanh Phong PhamNo ratings yet
- IJSTM17451382214600Document14 pagesIJSTM17451382214600Viraj GaonkarNo ratings yet
- Applsci 10 07923Document22 pagesApplsci 10 07923AmanuelAlemaNo ratings yet
- Conventional and Intelligent Controller For Quarter Car Suspension SystemDocument4 pagesConventional and Intelligent Controller For Quarter Car Suspension SystemInternational Jpurnal Of Technical Research And ApplicationsNo ratings yet
- Ghasem IDocument8 pagesGhasem IAnonymous LU3Dz3TKtVNo ratings yet
- Research Article: Intelligent Torque Vectoring Approach For Electric Vehicles With Per-Wheel MotorsDocument15 pagesResearch Article: Intelligent Torque Vectoring Approach For Electric Vehicles With Per-Wheel MotorsSanthoshbharathi MECHNo ratings yet
- ICAC2021 YK NAO VV DI DG Optimized Selfadaptive PID Speed Control For Autonomous VehiclesDocument6 pagesICAC2021 YK NAO VV DI DG Optimized Selfadaptive PID Speed Control For Autonomous VehiclesLy Hoang HiepNo ratings yet
- Dual-Mode Distributed Model Predictive Control For Platooning of Con-Nected Vehicles With Nonlinear DynamicsDocument11 pagesDual-Mode Distributed Model Predictive Control For Platooning of Con-Nected Vehicles With Nonlinear DynamicslaeeeqNo ratings yet
- MPC-based Path Tracking With PID Speed Control ForDocument16 pagesMPC-based Path Tracking With PID Speed Control ForZerøNo ratings yet
- v1 CoveredDocument27 pagesv1 CoveredengineeringtipsaNo ratings yet
- Predictive Active Steering Control For Autonomous Vehicle SystemsDocument14 pagesPredictive Active Steering Control For Autonomous Vehicle Systemsjiugarte1No ratings yet
- ICAC2021 YK NAO VV DI DG Optimized Selfadaptive PID Speed Control for Autonomous VehiclesDocument7 pagesICAC2021 YK NAO VV DI DG Optimized Selfadaptive PID Speed Control for Autonomous VehiclesHuynh Duy PhuongNo ratings yet
- Mathematical Modelling of Engineering Problems: Received: 25 October 2021 Accepted: 16 March 2022Document10 pagesMathematical Modelling of Engineering Problems: Received: 25 October 2021 Accepted: 16 March 2022Hailush TgNo ratings yet
- A Deep Reinforcement Learning-Based Controller For Magnetorheological-Damped Vehicle SuspensionDocument19 pagesA Deep Reinforcement Learning-Based Controller For Magnetorheological-Damped Vehicle Suspensionankon dasNo ratings yet
- Rowling J K HP01 Harry Potter Et La Pierre PhilosophaleDocument7 pagesRowling J K HP01 Harry Potter Et La Pierre PhilosophaleSf FgNo ratings yet
- Nonlinear Model Predictive Extended Eco-Cruise Control For Battery Electric VehiclesDocument6 pagesNonlinear Model Predictive Extended Eco-Cruise Control For Battery Electric VehiclesasadjadiNo ratings yet
- Fiver ProjectDocument2 pagesFiver ProjecttehseenmisbahNo ratings yet
- 10ijss DraftDocument25 pages10ijss DraftSuresh PatilNo ratings yet
- MPC Based Approach To Active Steering For Autonomous Vehicle SystemsDocument25 pagesMPC Based Approach To Active Steering For Autonomous Vehicle SystemsAmy CNo ratings yet
- Autonomous Lane Keeping with Model Predictive ControlDocument6 pagesAutonomous Lane Keeping with Model Predictive Controlchen4567No ratings yet
- Experimental Modelling and Optimal Torque Vectoring Control For 4WDDocument11 pagesExperimental Modelling and Optimal Torque Vectoring Control For 4WDLimonNo ratings yet
- Influence of Model Parameters On Vehicle Suspension Control: Sérgio Junichi Idehara, Matheus Rogério Roesler SabkaDocument11 pagesInfluence of Model Parameters On Vehicle Suspension Control: Sérgio Junichi Idehara, Matheus Rogério Roesler SabkaChethan GowdaNo ratings yet
- Distributed Control of A Car Suspension SystemDocument6 pagesDistributed Control of A Car Suspension Systemsardor88No ratings yet
- Enhanced Intelligent Driver Model To Access The Impact of Driving Strategies On Traffic CapacityDocument20 pagesEnhanced Intelligent Driver Model To Access The Impact of Driving Strategies On Traffic CapacityBruno FerreiraNo ratings yet
- Application of Hybrid ControlDocument12 pagesApplication of Hybrid ControlKatherine VasquezNo ratings yet
- Huang2019 PDFDocument15 pagesHuang2019 PDFLuis Jorge Herrera FernandezNo ratings yet
- Trajectory Planning and Feedforward Design For Electromechanical Motion Systems TUe 2003Document35 pagesTrajectory Planning and Feedforward Design For Electromechanical Motion Systems TUe 2003AquilesNo ratings yet
- Trajectory Planning1Document20 pagesTrajectory Planning1Ola SkeikNo ratings yet
- Evaluation of Impacts of Adaptive Cruise Control On Mixed Traffic FlowDocument8 pagesEvaluation of Impacts of Adaptive Cruise Control On Mixed Traffic FlowGrandis AdiatmaNo ratings yet
- Decentralized Model Predictive Control of Cooperating Uavs: Arthur Richards and Jonathan HowDocument6 pagesDecentralized Model Predictive Control of Cooperating Uavs: Arthur Richards and Jonathan HowjamestppNo ratings yet
- Multi-Rate Path Following ControlDocument6 pagesMulti-Rate Path Following ControlBinhMinh NguyenNo ratings yet
- Dynamics and Control of A Novel 3-DOF Parallel Manipulator With Actuation RedundancyDocument11 pagesDynamics and Control of A Novel 3-DOF Parallel Manipulator With Actuation RedundancyTanNguyễnNo ratings yet
- 1 s2.0 S0888327017305654 MainDocument10 pages1 s2.0 S0888327017305654 MainchinnavenkateswarluNo ratings yet
- Autonomous Intelligent Cruise Control: C. C. ChienDocument16 pagesAutonomous Intelligent Cruise Control: C. C. ChienAlex VladNo ratings yet
- Predictive Cruise Control in Hybrid Electric VehicDocument11 pagesPredictive Cruise Control in Hybrid Electric Vehickhoi.tonghuuNo ratings yet
- Semi-Automatic of Steer by Wire System Using Fuzzy Logic Control and Swarm OptimizationDocument9 pagesSemi-Automatic of Steer by Wire System Using Fuzzy Logic Control and Swarm OptimizationInternational Journal of Power Electronics and Drive SystemsNo ratings yet
- An Experiment For Position and Sway Control of A 3D Gantry CraneDocument6 pagesAn Experiment For Position and Sway Control of A 3D Gantry CraneandeshNo ratings yet
- Vehicle Stability Maintenance Through Online Estimation of Parameter UncertaintiesDocument5 pagesVehicle Stability Maintenance Through Online Estimation of Parameter UncertaintiesInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Vehicle System Dynamics: International Journal of Vehicle Mechanics and MobilityDocument29 pagesVehicle System Dynamics: International Journal of Vehicle Mechanics and MobilityjopiterNo ratings yet
- AEB Xe BusDocument6 pagesAEB Xe BusTu TruongNo ratings yet
- Applied Sciences: Nonlinear Control Design of A Half-Car Model Using Feedback Linearization and An LQR ControllerDocument17 pagesApplied Sciences: Nonlinear Control Design of A Half-Car Model Using Feedback Linearization and An LQR ControllerAntônio Luiz MaiaNo ratings yet
- AIAA SDM 2015 Paper KierDocument13 pagesAIAA SDM 2015 Paper KierAnmar Hamid AliNo ratings yet
- Mathametiksel Hierarchical IRJET-V4I12280Document6 pagesMathametiksel Hierarchical IRJET-V4I12280mabontimeNo ratings yet
- Automatic Cruise ControlDocument16 pagesAutomatic Cruise ControlSiva SakthivelNo ratings yet
- 2004MultibodySystemsDynamics 114 - 365 394ControlofmultibodysystemsPAntos PDFDocument31 pages2004MultibodySystemsDynamics 114 - 365 394ControlofmultibodysystemsPAntos PDFVAIBHAV DHAR DWIVEDINo ratings yet
- Collision Avoidance Control With SteeringDocument7 pagesCollision Avoidance Control With SteeringDavid MartínezNo ratings yet
- New Microsoft Word DocumentDocument3 pagesNew Microsoft Word DocumentbaliarsinghpritamNo ratings yet
- Optimal Control of Vehicular Formations With Nearest Neighbor InteractionsDocument16 pagesOptimal Control of Vehicular Formations With Nearest Neighbor InteractionsAlex VladNo ratings yet
- Robot Manipulator Guidance ControlDocument19 pagesRobot Manipulator Guidance ControlWilliam VenegasNo ratings yet
- IJERT Fuzzy Logic Control For Half Car SDocument7 pagesIJERT Fuzzy Logic Control For Half Car SUmut PlakNo ratings yet
- Torque Vectoring With A Feedback and Feed Forward Controller-Applied To A Through The Road Hybrid Electric VehicleDocument6 pagesTorque Vectoring With A Feedback and Feed Forward Controller-Applied To A Through The Road Hybrid Electric Vehiclesmmj2010No ratings yet
- 16-Paper - Lateral Control of Front-Wheel-Steering PDFDocument46 pages16-Paper - Lateral Control of Front-Wheel-Steering PDFSri Harsha DannanaNo ratings yet
- Cost-Effective Skyhook ControlDocument9 pagesCost-Effective Skyhook Controlgloohuis463No ratings yet
- Vibration Control of Active Vehicle Suspension System Using Fuzzy Logic AlgorithmDocument28 pagesVibration Control of Active Vehicle Suspension System Using Fuzzy Logic AlgorithmAnirudh PanickerNo ratings yet
- Modeling and Analysis of Active Full VehDocument11 pagesModeling and Analysis of Active Full VehSalem SNo ratings yet
- Soft Computing Techniques in Electrical Engineering (Ee571) : Topic-Lateral Control For Autonomous Wheeled VehicleDocument13 pagesSoft Computing Techniques in Electrical Engineering (Ee571) : Topic-Lateral Control For Autonomous Wheeled VehicleShivam SinghNo ratings yet
- tmp4D3F TMPDocument8 pagestmp4D3F TMPFrontiersNo ratings yet
- 10 18038-Aubtda 340798-351378Document11 pages10 18038-Aubtda 340798-351378ayesha siddiqaNo ratings yet
- A Mixed Suspension System For ADocument24 pagesA Mixed Suspension System For AAditya ChittipeddiNo ratings yet
- Neues verkehrswissenschaftliches Journal - Ausgabe 16: Capacity Research in Urban Rail-Bound Transportation with Special Consideration of Mixed TrafficFrom EverandNeues verkehrswissenschaftliches Journal - Ausgabe 16: Capacity Research in Urban Rail-Bound Transportation with Special Consideration of Mixed TrafficNo ratings yet
- OrlovH infinityCDCpaperDocument7 pagesOrlovH infinityCDCpaperThanh Phong PhamNo ratings yet
- LQ-based CEP-2013 RoadmodelDocument10 pagesLQ-based CEP-2013 RoadmodelThanh Phong PhamNo ratings yet
- Generalized H2 ControlDocument6 pagesGeneralized H2 ControlThanh Phong PhamNo ratings yet
- quasi-NLPV Observer FaultDetectionDocument6 pagesquasi-NLPV Observer FaultDetectionThanh Phong PhamNo ratings yet
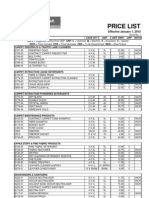
- Prochem Price List, January 1 2012Document7 pagesProchem Price List, January 1 2012Octavio Tornero MartosNo ratings yet
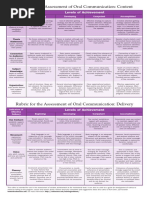
- Rubric For The Assessment of Oral Communication: ContentDocument2 pagesRubric For The Assessment of Oral Communication: ContentCons Agbon Monreal Jr.No ratings yet
- Victron Energy and Fischer Panda Freedom of YachtingDocument20 pagesVictron Energy and Fischer Panda Freedom of YachtingAlba Car MarNo ratings yet
- What Is A Schema in PsychologyDocument7 pagesWhat Is A Schema in PsychologyJoseph GattNo ratings yet
- 2tdc190005 - MNS-MCC LV Specification RevbDocument17 pages2tdc190005 - MNS-MCC LV Specification RevbAlejan-dro AlvarzNo ratings yet
- Math Olympiad Lunch ClubDocument2 pagesMath Olympiad Lunch Clubapi-258636998No ratings yet
- Voucher of Hotspot Users by Comment "KUNDUL2SEP"Document5 pagesVoucher of Hotspot Users by Comment "KUNDUL2SEP"Suherdi IrwansyahNo ratings yet
- Analisis Biaya Pada Perusahaan Produsen Air Minum (Studi Kasus Di PDAM Kabupaten Bondowoso)Document13 pagesAnalisis Biaya Pada Perusahaan Produsen Air Minum (Studi Kasus Di PDAM Kabupaten Bondowoso)Fajar AjaNo ratings yet
- MCS 012Document65 pagesMCS 012Vishal ThakorNo ratings yet
- Etv 214 PDFDocument2 pagesEtv 214 PDFKevin50% (2)
- Kajian Pustaka: Uji Kepekaan Antibiotik Pada CorynebacteriumDocument13 pagesKajian Pustaka: Uji Kepekaan Antibiotik Pada CorynebacteriumAgus DigitNo ratings yet
- Promotion BaruDocument23 pagesPromotion Barunurul anjaniNo ratings yet
- MID130 Eaton & Meritor Transmission DTCDocument9 pagesMID130 Eaton & Meritor Transmission DTCesam PhilipeNo ratings yet
- Barber EssayDocument8 pagesBarber Essayafhbgdmbt100% (2)
- GHS CLP Hazard Pictograms, H and P StatementsDocument10 pagesGHS CLP Hazard Pictograms, H and P StatementsatoxinfoNo ratings yet
- Determination of Consistency of Standard Cement PasteDocument2 pagesDetermination of Consistency of Standard Cement PasteDarshanNo ratings yet
- IRIS Texan II - Abbreviated ChecklistDocument3 pagesIRIS Texan II - Abbreviated Checklistpela182003No ratings yet
- Chapter 16 ScribdDocument7 pagesChapter 16 ScribdDennisAbelNo ratings yet
- Nokia For Sale From Powerstorm 4SU11151274Document3 pagesNokia For Sale From Powerstorm 4SU11151274Rinson Jawer Rivera GonzalezNo ratings yet
- IP Project File HarshDocument37 pagesIP Project File HarshbalotiyaprakeshNo ratings yet
- SAPN - 20.64 PUBLIC - SAPN Asset Management Plan 3.2.01 Substation Transformers 2014 To 2025 PDFDocument77 pagesSAPN - 20.64 PUBLIC - SAPN Asset Management Plan 3.2.01 Substation Transformers 2014 To 2025 PDFbhabani prasad pandaNo ratings yet
- For Pregnant Examinees, Please Refer To The Printed Names With The Triple A (AAA) LegendDocument23 pagesFor Pregnant Examinees, Please Refer To The Printed Names With The Triple A (AAA) LegendPhilBoardResultsNo ratings yet
- Learning and The BrainDocument5 pagesLearning and The BrainBrendan MakidonNo ratings yet
- Experiment No - 4: University of Zakho College of Engineering Department of Petroleum Eng Laboratory of Drilling FluidDocument12 pagesExperiment No - 4: University of Zakho College of Engineering Department of Petroleum Eng Laboratory of Drilling FluidNasih AhmadNo ratings yet
- Mathematical Statistics (MA212M) : Lecture SlidesDocument15 pagesMathematical Statistics (MA212M) : Lecture SlidesAkshay NarasimhaNo ratings yet
- Noite FelizDocument2 pagesNoite FelizMarianaNo ratings yet
- Thin Cylinderical ShellsDocument9 pagesThin Cylinderical ShellsYogendra KumarNo ratings yet
- Types of Controllers: P, I, D, PI, PD, and PID ControllersDocument5 pagesTypes of Controllers: P, I, D, PI, PD, and PID Controllerspratik chakrabortyNo ratings yet