
Skip Cycle Engine
Uploaded by
kumar_yogesh223881Copyright:
Available Formats
Skip Cycle Engine
Uploaded by
kumar_yogesh223881Copyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Copyright:
Available Formats
Skip Cycle Engine
Uploaded by
kumar_yogesh223881Copyright:
Available Formats
AbstractSkip cycle is a working strategy for spark ignition
engines, which allows changing the effective stroke of an engine
through skipping some of the four stroke cycles. This study proposes
a new mechanism to achieve the desired skip-cycle strategy for
internal combustion engines. The air and fuel leakage, which occurs
through the gas exchange, negatively affects the efficiency of the
engine at high speeds and loads. An absolute sealing is assured by
direct use of poppet valves, which are kept in fully closed position
during the skipped mode. All the components of the mechanism were
designed according to the real dimensions of the Anadolu Motor`s
gasoline engine and modeled in 3D by means of CAD software. As
the mechanism operates in two modes, two dynamically equivalent
models are established to obtain the force and strength analysis for
critical components.
KeywordsDynamic Model, Mechanical Design, Skip Cycle
System (SCS), Valve Disabling Mechanism
I. INTRODUCTION
NTERNAL combustion engines have a variety of
application area owing to the traditional advantages, like
providing high power density, having high energy content and
the ease of onboard storage of liquid fuels. The concern for the
environment and the insufficient fuel resources increases with
the growing amount of internal combustion engines. So, the
trend in the industry has been increasing engine efficiency
which is reducing the fuel consumption and the generation of
pollutants. The total efficiency of the conventional spark
ignition engines is approximately 30-35% as a result of many
factors including internal friction and parasitic losses, rolling
resistance and air drag. The IC engines at full load have a
limited thermodynamic efficiency. On the contrary, at partial
load due to the pumping losses, the efficiency of the engine
This work is supported by the Anadolu Motor Co., Istanbul, Turkey.
Ismail Gerzeli is with the Machine Design Department, Mechanical
Engineering Faculty, Istanbul Technical University, Istanbul, Turkey
(corresponding author to provide phone: +90 212 245 60 73; fax: +90 212
245 07 95; e-mail: gerzeli@itu.edu.tr)
Cemal Baykara is with the Machine Design Department, Mechanical
Engineering Faculty, Istanbul Technical University, Istanbul, Turkey (phone:
+90 212 245 60 73; fax: +90 212 245 07 95; e-mail: baykaracem@itu.edu.tr)
Osman Akin Kutlar is with the Automotive Department, Mechanical
Engineering Faculty, Istanbul Technical University, Istanbul, Turkey (phone:
+90 212 285 34 63; fax: +90 212 285 34 43; e-mail: kutlar@itu.edu.tr)
dramatically decreases. To solve this problem the variable
valve actuation, the reduction of the gas exchange through
charge dilution, and for larger engines the cylinder
deactivation was developed [1].
The skip-cycle strategy for spark ignition engines, presented
and analyzed by Kutlar [2]-[3], allows to change the density
of power strokes per revolution of the engine through skipping
some of the four stroke cycles. The result proves that the SCS
makes it possible to operate the engine at lower speeds and
loads with less fuel consumption, without any stability
problems. On the other hand, the brake specific fuel
consumption increases at high speeds and loads, due to the fuel
and air leakage of rotary valves used on research engine. The
result shows that the fuel consumption increases the HC and
O
2
emissions and decreases CO and CO
2
emissions compared
to the normal stroke mode. Kutlar also suggests that the direct
use of poppet valves instead of rotary valve for cycle skipping
may solve the leakage problem [3].
Some valve disabling mechanisms were represented by the
inventors to keep intake and/or exhaust poppet valves in fully
closed position during the engine operation. Walsch [4]
invented a valve disabling device associated with a rocker arm.
Also, a finger follower rocker arm system was represented and
patented by Diggs [5] including an actuating mechanism to
engage/disengage a pin to limit the movement of the rocker
arm. Then, a mechanism was defined by Dyer [6] for
controlling the valve operation in an internal combustion
engine based on shifting the cam lobes which controls the
valve lift at zero to maximum deflection. And finally, another
valve actuating mechanism, which offers optional disabling
valves, was proposed by Ajiki and Matsuura [7].
On the research engine, rotary valves placed on the inlet port
and are used to prevent the gas exchange. Even though, they
are in fully closed position, they do not acquire a complete
sealing [3]. As a solution, direct use of poppet valves instead
of rotary valves is suggested and the mechanism is based on
holding valves in fully closed position during the skipped
cycle.
II. SUMMARY OF THE MECHANISM AND WORKING PRINCIPLE
The present valve actuating mechanism used on engine
consists of a cam lobe, tappet, push rod, rocker arm, poppet
valve and its spring. The rocker arm is pivoted on the support
shaft which is horizontally placed through the journal of
cylinder head. The tappet and pushrod are interposed between
Mechanical Design and Theoretical Analysis of
a Skip-Cycle Mechanism for an Internal
Combustion Engine
Ismail Gerzeli, Cemal Baykara, and Osman Akin Kutlar
I
World Academy of Science, Engineering and Technology 53 2009
403
the cam and the rocker arm. So, one end of the rocker arm is
actuated by a cam, and the other end engages the free stem of
the intake or exhaust poppet valve. According to the rotation
of the cam, the rocker arm undergoes a see saw motion and
pushes the valves against the reaction force generated by valve
springs.
The new mechanism is designed for Anadolu Motor`s water
cooled gasoline engine which has limited space and is not
suitable to make some constructive changes at particular areas.
The most suitable option is the cylinder head assembly to
accommodate the mechanism. Although the engine has a single
cylinder and one pair of inlet and exhaust valves, this
mechanism can be adopted for the multi cylinder engines. As
the last step, all the specifications of the engine parts are
obtained from the manufacturer and the final assembly was
embodied according to the real dimensions of the original
engine.
The skip cycle strategy is assured by keeping the poppet
valves in the closed position which are operating in two
modes, normal or skip mode. In the normal four stroke mode
(n), the SCM is disabled, so the valves are activated according
to the rocker arm motion. However, during the skip four stroke
mode (s), the SCM is enabled and valves remains in the fully
closed position during the gas exchange (intake or exhaust).
A. Valve Disabled Mode
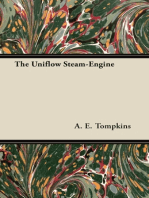
The section view of the mechanism during the valve
disabled mode is shown in (Fig. 1). In this application, locking
plate remains in the retracted position. So, the plunger, which
contacts the rocker arm, is free to slide in a close fit inside the
spring retainer. The spring, located in the hollow, is used to lift
up the plunger to keep always in contact with the rocker arm.
Furthermore, the spring retainer is connected to the poppet
valve with half collets and clamps the valve spring. The valve
spring is stiffer than the plunger spring and assembled
preloaded. As the plunger spring has a low spring rate, its
reaction force at maximum deflection will not be enough to
overcome the initial force of the valve spring. So, the axial
force acting on the plunger is not transmitted to the valves, and
they remain fully closed position.
Locking Plate
(Retracted)
Rocker Arm
Pushrod
Tappet
Cam
Poppet Valve
Engine Block
Valve Spring
Plunger Spring
Plunger
Spring Retainer
Cylinder Head
Fig. 1 Valve disabled mode of the skip-cycle mechanism
Locking Plate
(Locked)
Fig. 2 Valve enabled mode of the skip-cycle mechanism
B. Valve Enabled Mode
The section view of the mechanism during the valve enabled
mode is shown in (Fig. 2). In this operating mode, the locking
plate slides horizontally and locates under the plunger. So, the
movement of the plunger relative to the spring retainer is
limited and the mechanism functions as a one single piece. The
spring retainer is free to slide in a close fit inside the cylinder
head body. Eventually, the oscillating motion of the rocker
arm is transmitted to the valves. When the rocker arm pivots in
reverse direction, the valve spring force pushes the retainer
and the locking plate in upward direction. Simultaneously, it is
supposed to pull back the locking plate to the first position.
Rocker Arm
A.Cylinder Head
B.Spring Retainer
E.Locking Plate
C.Plunger
Pivot Shaft
Poppet Valve
Fig. 3 The 3D model of the skip-cycle mechanism assembly
III. DESIGN OF COMPONENTS
The skip-cycle mechanism assembly (Fig. 3) is located
between rocker arm and valve stem, and includes some newly
designed and modified components. The design can be
World Academy of Science, Engineering and Technology 53 2009
404
categorized into five distinct areas, namely; A. Cylinder Head,
B. Spring Retainer, C. Plunger, D. Plunger Spring, E. Locking
Plate.
A. Cylinder Head
Basically, the cylinder head assembly consists of two parts,
the cylinder head body (Fig. 4) and the cover which are
located at the top section of the engine. Furthermore, it
includes the main parts of the valve actuating mechanism, the
rocker arms and the pivot shaft, the valve stems, springs, and
spring retainers.
The SCM is interpolated between the rocker arm and the
valve stem, which unavoidably increases the dimensions of
cylinder head assembly and also changes the axial position of
pivot shaft bushing. As the rise of dimension triggers the
material consumption and makes manufacturing difficult, it
should be preserved at minimum level.
Rocker Arm Slot
Cylinder Shaped
Block
Locking
Plate Slot
Pivot Shaft
Bushing
Fig. 4 Cylinder head body
In the valve enabled mode of the mechanism, while the
spring retainer and the locking plate have reciprocating
motion, both need a close fit to easily slide. For guiding the
spring retainer, a cylinder shaped block was designed on the
inner front section of cylinder head. However, the walls of
housing hinders the see saw motion of rocker arm. So, a slot
was drilled to solve this problem. As the last step, for pivoting
locking plate a vertical slot was milled to the outer wall of the
cylinder head.
B. Spring Retainer
Spring retainers are designed to clamp and securely hold
upper portions of the spring and generally used in valve
actuating mechanisms. The valve stems are connected to the
retainers with half collets. In preliminary steps of embodiment,
although the SCM and retainers were decided to be designed
as separate parts, to gain space and simplify installation, both
of them were formed as a single part (Fig. 5). Hereby, the
retainer was rearranged as a main body of skip-cycle
mechanism, and includes the plunger and the plunger spring.
To confine the plunger spring, a hole was drilled in the
middle of the retainer. The diameter of the hole (18 mm) and
the outer diameter (17,6 mm) of the plunger spring are related
with each other and optimized in dimensions for best
performance. Also, note that the natural diameter changes are
considered, when springs are compressed and therefore the
hole was drilled in tolerance limits.
Plunger Spring
Constrain
Locking Plate Slot
Rocker Arm Slot
Bottom Geometry For
Constraining Valve Spring
Plunger Hollow
Fig. 5 Spring retainer
To guide the locking plate, a slot is machined on the outer
surface of the retainer. The junction point and the bottom
geometry of the retainers stayed the same as in the original
one.
C. Plunger
The plunger (Fig. 6) is always in contact with the rocker
arm. The contact pressure between mating surfaces of the
plunger and the rocker arm causes Hertz contact stress
distributions. To prevent the surface failure, the maximum
surface contact pressure should not exceed the endurance limit.
$QVVQO
IGQOGVT[
Fig. 6 Plunger
While designing the bottom of the plunger, the original
geometry of the spring retainer is used to constrain the upper
portion of the plunger spring.
D. Plunger Spring
A constant pitch round-wire helical compression spring is
used to raise the plunger during the valve disabled mode. It is
important to define the spring geometry for calculation and
manufacturing (Table I). The working length of the plunger
spring is equal to the stroke distance of the rocker arm. As the
limited outside diameter of the spring is known, a suitable
spring index C is selected, and the wire diameter is
determined, and selected from the preferred diameter table of
the material. As a material, the same one with valve spring
chrome vanadium, identified A232 in ASTM designations, is
World Academy of Science, Engineering and Technology 53 2009
405
used, because it is suitable for fatigue loading and also good
for shock and impact loads [8]. The temperature at the cylinder
head is approximately 150C degrees, which has to be taken
into account because the load exerted by the spring will
gradually relax with time.
The reaction force of the spring at the maximum deflection
should equal to the total weight at the valve side of rocker arm.
So, the spring rate is found and subsequently the number of
active coils is determined (1).
4
3
8
a
d G
N
D k
(1)
where D is mean coil diameter, d is wire diameter, N
a
is
number of active coils, which is an important parameter for the
height of the assembly and G is the shear modulus of material.
As the spring has squared-ground ends, number of total coils
N
t
is equal to:
2
t a
N N (2)
So, according to the total number of coils (2), the shut height
of the spring is determined. The spring is assembled in the
retainer with initial deflection (approx. 20% of the working
deflection) and clash allowance is taken (approx. 15% of the
working deflection) to avoid reaching the shut height [9].
TABLE I
THE GEOMETRY PARAMETERS OF THE PLUNGER SPRING
d (mm) D (mm) C (D/d) Na
Min.
Working
Len. (mm)
Assembly
Length
(mm)
1,6 16 10 6,5 15,175 25,675
E. Locking Plate
The locking plate (Fig. 7) is formed as cylindrical shape. To
increase the contacting area with the plunger the front side of
the locking plate is milled. In the preliminary steps of design,
the shape and the diameter of the locking plate is not
determined. After the dynamic force analysis the final
embodiment of this plate is made.
Plane Surface to Increase
the Contacting Area
Fig. 7 Locking Plate
IV. EQUIVALENT SYSTEM MODEL OF SKIP-CYCLE
MECHANISM
The main purpose of establishing dynamic models is to
determine the forces that occur in moving mechanism.
Creating lumped parameter model of complicated mechanism
greatly simplify the mathematical calculations [10]. All the
mass which moves during the operation lumped together as
m
eff
, the elasticity of all parts as the spring constant k
eff
.
Coulomb friction, resulting between contacting surfaces, and
the viscous damping, resulting from the shearing of a lubricant
in the gap between the moving parts, are assumed negligible in
order to simplify dynamic model and calculations.
The present valve actuating mechanism is modeled as a
massless displacement for representing the position of the next
component (Fig. 8). In the valve disabled mode, the system
displacement represents the position of the plunger, which is
coupled through the plunger spring. On the other hand, in the
valve enabled mode, the system displacement refers to the
position of skip-cycle mechanism which is coupled to the
engine block through the valve spring.
All components are treated as lumped masses and all forces
are considered to be coaxial and are not generating any
moment.
Once all the components reduced to a single degree of
freedom equivalent system, free-body diagrams of the locking
plate and the plunger are gained and all the acting forces are
attached, which are equal to the inertial forces of the
components according to d`Alembert principle.
A. Lumped Parameter Dynamic Model
The system is separated individual parts as shown in (Fig. 8)
and each of the significant components are represented with a
lumped mass element [10]. The elasticity of individual
elements is shown as springs that connected together in series.
It is assumed that the rocker arm consists of two lumped
masses at endings and is connected with a rigid, massless rod
together. Furthermore, each mass has own displacement which
are symbolized by y
1
to y
5
.
m
tp
m
pr
m
rA
m
rB
k
rA
k
pr
k
tp
k
rB
y
1
y
2
y
3
y
4
y
5
System
A B
Fig. 8 Five-DOF model of the valve actutating system
World Academy of Science, Engineering and Technology 53 2009
406
B. Determining and Combining Masses and Springs
Spring elements, representing the elasticity of lumped
masses, derived from the deformation formula.
Both tappet and pushrod are subjected an axial load, so the
equation for the deformation and their spring rate k are;
tp pr
AE
k k
l
(3)
where A is known as cross-sectional area, l is length and E is
the modulus of elasticity.
Any applied bending load will causes deflection on rocker
arm. As it is lumped with two masses at each side, it can be
modeled as it is double cantilever beam fixed at the bearing
axis and unsupported at the other end [10]. The bending
deflection of a rocker arm is calculated by the formula given:
3
3 I
rA rB
E
k k
l
(4)
where I is the cross-sectional second moment of area of beam,
l is its length, and E is the modulus of elasticity for the
material.
Skip-cycle mechanism consists of two helical coil
compression springs, valve and plunger spring. As the valve
spring specifications were obtained from the manufacturer; its
spring rate was directly used in calculations. However, the
plunger spring is custom design and its geometry is defined by
some parameters which are used for calculation and
manufacturing purposes. The rate of a round-wire helical
compression spring can be written as:
4
3
8
s
a
d G
k
D N
(5)
All the springs, which are connected in series to each other,
have own displacement and subjected to the same force. So,
the effective spring constant is found respectively for both
sides.
1
1 1 1
1
1
A
tp pr kA
B
kB
k
k k k
k
k
(6)
All masses, on the left and right side of rocker arm, are
connected in series to each other and have separate
displacements. Similar lumped mass model of rocker arm is
represented by two masses placed at cam side (A) and valve
side (B). Statically equivalent model can be used as a solution,
because the mass of the model is assumed equal to the original
body and the center of gravity is in the same location as that of
the original rocker arm [10]. The rocker arm was modeled as
3D in digital environment and the center of gravity was
defined by means of CAD Software (Fig. 9). The moments of
lumped masses according to pivot point should be equal, so
the static equivalence can be written as:
rA rB r
g rB b rA a
m m m
ml m l m l
(7)
m
rA
m
rB
A B
l
A
l
B
l
G
Fig. 9 Statically equivalent lumped mass model of the rocker arm
So, the effective masses are found respectively for both sides.
A tp pr rA
B rB
m m m m
m m
(8)
All the masses and spring constants should gather at the
valve side (B) of the rocker arm to model a single-DOF
lumped parameter system for generating dynamic force
analysis. The total mass m
A
and the total spring constant k
A
at
cam side (A) are modified by the square of the lever ratio of
the rocker arm (9). So, the effective masses and spring
constants at point B is derived from the equation given below:
2
2
eff B A
eff B A
a
m m m
b
a
k k k
b
(9)
C. Dynamically Equivalent System for Valve Enabled and
Disabled Mode of the Mechanism
As the locking plate and the plunger are newly designed, the
forces acting on, are supposed to be calculated to prevent the
mechanical failures.
The dynamically effective system of skip-cycle mechanism
for the valve enabled mode is shown in (Fig. 10a), which is a
conservative model as it keeps energy constant with no losses.
y is the actual lift of equivalent mass and y
c
is the rise of cam,
which is not equal to y due to the linkage deflection. The free-
body diagram (Fig. 10b) shows the acting forces on the SCM,
which are the cam force symbolized by F
c
, denoted depending
on the time, the valve spring force F
vs
, initial force of valve
spring at assembly F
vsi
, and F
1
is the contact force occurs
between the mass of the system and the mechanism. Finally,
the force occurred due to the spring constant of the system is
represented by F
k
.
World Academy of Science, Engineering and Technology 53 2009
407
m
eff
Cam
Cam Motion
k
eff
y
y
c
F
c
(t)
m
scm
F
k
F
1
F
1
F
1
F
vs
F
vsi
m
scm
m
eff
k
vs
(a) (b)
Fig. 10 Valve enabled mode of the skip-cycle mechanism: a) Dynamically
equivalent model; b) Free-body diagram
Note that, in the valve enabled mode, the mechanism
functions as a one single piece, so the acting net force on the
locking plate is equal to the inertial force of the SCM.
According to Newton`s second law, the equilibrium of
vertical forces can be written for the effective mass of the
system:
1
( )
( )
c k eff
k eff c
F t F F m y
F k y y
(10)
And for the locking plate equation can be written as given
below:
1 vs vsi scm
vs vs
F F F m y
F k y
(11)
As both equations (10)-(11) are simultaneously solved the net
force yields:
( )
c k eff vs vsi net scm
F t F m y F F F m y (12)
The mass properties of the newly designed components
were estimated by means of CAD software. The mass of skip-
cycle mechanism contains plunger, spring retainer, locking
plate, half collets and also includes one-third of the actual
effective weight of plunger spring.
1/ 3 2
scm sr lp pl ps hc
m m m m m m (13)
Some modifications are required during constituting the
dynamically equivalent model of the valve disabled mode. The
mass of the plunger and the spring rate of the plunger spring,
represented relatively as m
pl
and k
ps
, are attached to the system
displacement of the original model (Fig. 8) and the
dynamically equivalent model for the valve disabled mode
(Fig. 11a) and the free-body diagram of the plunger (Fig. 11b)
are obtained.
m
eff
Cam
Cam Motion
k
eff
y
y
c
F
c
(t)
m
pl
F
k
F
2
F
2
F
2
F
ps
F
psi
m
pl
m
eff
k
ps
(a) (b)
Fig. 11 Valve disabled mode of the skip-cycle mechanism: a) Dynamically
equivalent model; b) Free-body diagram
The equilibrium of vertical forces can be written for the
plunger as given below:
( )
c k eff ps psi net pl
F t F m y F F F m y (14)
D. Determination of Cam Profile and Actual Cam
Displacement
The polydyne cam, which is defined by means of
polynomial equation, was chosen as it generally preferred in
highly flexible and high-speed mechanisms [11]. As long as
manufacturing accuracy is justified, the polynomial curve
shows excellent performance, because there is no sudden
change in acceleration at the intersection of the dwell periods
and the rise curve.
The 3-4-5 polynomial is consistent as the displacement
equation. As simultaneously solved, the boundary conditions
substituted in the general polynomial equation. So, the
equations yield for unit maximum rise in a unit cam angle:
3 4 6
2 3 4
2 3
1 10 15 6
30 60 30
60 180 120
y
y
y
(15)
The displacement formula has units in mm and the acceleration
formula has units in millimeter/degree
2
(15). It is convenient to
change the independent variable from the cam angle to the
time t by multiplying the equation with 36s
2
, where s is the
speed of the cam (rpm).
Furthermore, it is compulsory substituting the actual rise
and cam angle to give the particular equation of skip-cycle
mechanism. The conversion is accomplished by multiplying
each term of polynomial by the ratio K
n
, where is the total
World Academy of Science, Engineering and Technology 53 2009
408
cam angle from initial point to maximum rise, and h is the total
rise in cam angle . The displacement formula is derived for
the cam side (A) of the mechanism. Nevertheless, the
displacement at the valve side (B) is different due to the lever
ratio of the rocker arm (16).
n
A n
n
B
B n
A
y hC
l
y hC
l
(16)
The polydyne method is applied when designing the actual
cam profile, as it cannot be assumed that the follower lift and
the cam lift is the same due to clearances and the flexibility of
the system. Designing the cam profile to give the desired
follower action, polydyne method was derived by Rothbart
[11] as given below:
eff s
vsi
c
eff eff eff
c a r
k k
L F m
y y y
k k k
y r k y cy
(17)
where L is the external load and zero for this case, F
vsi
is the
preload of the valve spring, r
a
is the ramp height, which is the
sum of the initial static deflection r
s
and clearances of backlash
in linkage r
k
. Initial static deflection is negligible in calculation
because it is small when compared with static deflection.
Finally, k
r
is the spring ratio constant, which is related to the
spring constant of the system k
eff
and the valve spring k
vs
, and c
is the dynamic constant.
V. RESULTS OF THE FORCE AND STRENGTH ANALYSIS
The dynamic force analysis was performed for both mode of
the mechanism at a cam speed of 1500 rpm, which is the
maximum speed of the Anadolu Motor`s gasoline engine. The
tappet raises 6.55 mm in with 70 degrees of cam rotation. So,
the maximum acceleration at cam side was found
approximately 650 m/s
2
, however, at the valve side due to
lever ratio of the rocker arm it increases to 1000 m/s
2
. So, the
completely reversed cyclic fluctuating loads are illustrated in
(Fig. 12), which was calculated for the locking plate and the
plunger.
A. Locking Plate
The plate is subjected to a completely reversed axial force
of 150 N. As the actual shearing stress distribution is not
uniform, the maximum direct shearing stress at neutral axis for
cylindrical section shape is equal to:
4
3
a
F
A
(18)
where A is the cross-sectional area of the plate and F
a
is the
alternating load amplitude. Consequently, the shearing stress is
found 6.4 MPa (18). As the locking plate is made from the
same material of the spring retainer (AISI 1050, normalized at
900C), the desired fatigue life is obtained according to the
Smith diagram of the material [12].
Fig. 12 The fluctuating load acting on the plunger and the locking plate
B. Plunger Spring
As the spring generates a reaction force only proportional
with maximum deflection and the spring rate, the purpose of
the spring is not compensate the inertial force of the plunger.
However, it is subjected to a fluctuating load and so; the shear
stress in the coil is calculated according to the formula given;
3
8
a
a w
F D
K
d
(18)
where K
w
is Wahl`s factor, which considers both direct shear
stress and the stress concentration due to curvature, and F
a
is
the alternating load (18.25 N). The alternating shear stress in
the coil found 300.5 MPa and consequently, the spring-wire
has a torsional endurance limit which for peened springs is
approximately 465 MPa (Table II) [13].
TABLE II
THE ENDURANCE LIMIT OF SPRINGS
S
ew
310 MPa for unpeened springs
S
ew
465 MPa for peened springs
VI. CONCLUSION & FUTURE WORK
A novel skip cycle mechanism for the Anadolu Motor`s
gasoline engine was presented. The design was focused on the
leakage problem of the rotary valves, which especially affects
the efficiency of the skip-cycle strategy at high speeds and
loads. As the valves stay in closed position, an absolute sealing
is obtained. Furthermore, this proposed mechanism allows to
perform different skip cycle scenarios for different engine
speeds and loads. Although this solution is proposed for a
single cylinder engine, it could be adopted for the multi
cylinder engines.
Future work will focus on the actuation of the locking plate
because it is not considered as a problem of this study. The
geometry of the plate could change depending on the new
solutions of actuating mechanism. A linear solenoid, linear
motor or a new cam mechanism may bring a satisfactory
solution.
World Academy of Science, Engineering and Technology 53 2009
409
ACKNOWLEDGMENT
Ismail Gerzeli is greatful to Ceren Demirkesen and Dilara
Yamac for their indispensable and greatly appreciated
supports.
The authors also wish to thank Abdulhadi Ozcalici from
Anadolu Motor Co. for his cooperation during this work.
REFERENCES
[1] O. A. Kutlar, H. Arslan, and A.T. Calik, 'Methods to improve
efficiency of four stroke spark ignition engines at part load, Energy
Conversion and Management, vol. 46, pp. 32023220, 2005.
[2] O. A. Kutlar, 'A new method to decrease the fuel consumption at part
load conditions of four stroke Otto cycle (Rochas) Engine-skip cycle
engine, PhD Thesis, Institute of Science and Technology, Istanbul
Technical University, Istanbul, 1999 [in Turkish].
[3] O. A. Kutlar, H. Arslan, and A. T. Calik, 'Skip cycle system Ior spark
ignition engines: An experimental investigation of a new type working
strategy, Energy Conversion and Management, vol. 48, pp. 370379,
2007.
[4] M. M. Walsch, 'Valve disabling mechanism, U.S. Patent, 4 380 219,
April 19, 1983.
[5] M. B. Diggs, 'Finger follower rocker arm, U.S. Patent, 5 653 198,
August 5, 1997.
[6] G. L. Dyer, 'Camshaft for controlling variably opening valves, U.S.
Patent, 3 986 484, October 19, 1976.
[7] Y. Ajiki, and M. Matsuura, 'Valve actuating apparatus, U.S. Patent,
4 537 164, August 27, 1985.
[8] Spring Design Manual, Warrandale, PA : Society of Automobile
Engineers, 1990, ch. 2
[9] R. L. Norton, 'Machine Design : An Integrated Approach, 3th ed.,
Prentice Hall, 2005, pp. 739810.
[10] R. L. Norton, 'Design of Machinery : An Introduction to the Synthesis
and Analysis of Mechanisms and Machines, New York : McGraw-
Hill, 1992, ch. 1417.
[11] H. A. Rothbart, 'Cams : Design, Dynamics, and Accuracy, New
York : Wiley, 1956, ch. 789.
[12] F. C. Babalik, 'Makine Elemanlari ve Konstruksiyon Ornekleri,
Ankara : Nobel Yayin Dagitim, 2006, pp. 58-64. [in Turkish]
[13] A. C. Ugural, 'Mechanical Design : An Integrated Approach, Boston :
McGraw-Hill /Higher Education, 2004, ch. 14.
.
World Academy of Science, Engineering and Technology 53 2009
410
You might also like
- Service Instructions: PERFECTA 76 / 92 / 115 / 132 / 168 Uc / TV100% (2)Service Instructions: PERFECTA 76 / 92 / 115 / 132 / 168 Uc / TV32 pages
- "Camless Engine": A Technical Seminar Report OnNo ratings yet"Camless Engine": A Technical Seminar Report On29 pages
- Tribology and Dynamics of Engine and Powertrain Fundamentals Applications and Future Trends0% (2)Tribology and Dynamics of Engine and Powertrain Fundamentals Applications and Future Trends13 pages
- A Seminar Report On "Camless Engine": Cochin University of Science and TechnologyNo ratings yetA Seminar Report On "Camless Engine": Cochin University of Science and Technology26 pages
- Intelligent Valve Actuation - A Radical New Electro-Magnetic Poppet Valve ArrangementNo ratings yetIntelligent Valve Actuation - A Radical New Electro-Magnetic Poppet Valve Arrangement23 pages
- Cylinder Deactivation System - An IntroductionNo ratings yetCylinder Deactivation System - An Introduction20 pages
- Camless Engine: Working of Push Rod EngineNo ratings yetCamless Engine: Working of Push Rod Engine14 pages
- 03.flexible Computer Based Control of Ignition and Injection Units of A Gasoline Engine With Skip Cycle MechanismNo ratings yet03.flexible Computer Based Control of Ignition and Injection Units of A Gasoline Engine With Skip Cycle Mechanism6 pages
- PDF Camless Engines Seminar Report Compress - PDF 20241117 092928 0000No ratings yetPDF Camless Engines Seminar Report Compress - PDF 20241117 092928 000021 pages
- Makalah Automatic Transmission ComponentsNo ratings yetMakalah Automatic Transmission Components8 pages
- Scms College of Polytechnics, Vaikkara Shim Underbucket TechnologyNo ratings yetScms College of Polytechnics, Vaikkara Shim Underbucket Technology29 pages
- Design and Analysis of Cam Shaft For Multi Cylinder Engine67% (3)Design and Analysis of Cam Shaft For Multi Cylinder Engine52 pages
- "Camless Engine": Visvesvaraya Technological University, Belgaum100% (1)"Camless Engine": Visvesvaraya Technological University, Belgaum29 pages
- Dept. of Mechanical Engg. 1 KMCT Ce, M-TechNo ratings yetDept. of Mechanical Engg. 1 KMCT Ce, M-Tech14 pages
- Ad Dit LC B Ti E I Advanced Internal Combustion Engines Mae 589V (Spring 2009)No ratings yetAd Dit LC B Ti E I Advanced Internal Combustion Engines Mae 589V (Spring 2009)15 pages
- Efficiency of A New Ic Engine Concept With Variable Piston MotionNo ratings yetEfficiency of A New Ic Engine Concept With Variable Piston Motion17 pages
- Final-Advance Breaking System For Hill Drive VehiclesNo ratings yetFinal-Advance Breaking System For Hill Drive Vehicles59 pages
- Hybrid Engine: BY:-Manjunath Jois 1SI04ME413No ratings yetHybrid Engine: BY:-Manjunath Jois 1SI04ME41318 pages
- Term Paper On Fluid Coupling and Torques Converter Converted 1100% (3)Term Paper On Fluid Coupling and Torques Converter Converted 124 pages
- Pimpri Chinchwad Municipal Corporation, Pimpri-18. Citizen Charter - Marriage RegistrationNo ratings yetPimpri Chinchwad Municipal Corporation, Pimpri-18. Citizen Charter - Marriage Registration2 pages
- Cylinder Pressure and Combustion Heat Release Estimation Using Nonlinear Sliding ObserversNo ratings yetCylinder Pressure and Combustion Heat Release Estimation Using Nonlinear Sliding Observers9 pages
- Canned Motor Pump API 685: Technical DataNo ratings yetCanned Motor Pump API 685: Technical Data2 pages
- Metallographic Specimen Preparation Basics: by Donald C. Zipperian, Ph.D. Pace TechnologiesNo ratings yetMetallographic Specimen Preparation Basics: by Donald C. Zipperian, Ph.D. Pace Technologies14 pages
- UK & Ireland Coating Selector: A Guide To The Kingspan Range of CoatingsNo ratings yetUK & Ireland Coating Selector: A Guide To The Kingspan Range of Coatings32 pages
- Draft: European Standard Norme Europeenne Europaische NormNo ratings yetDraft: European Standard Norme Europeenne Europaische Norm39 pages
- Aftertreatment Diesel Particulate Filter Systems100% (4)Aftertreatment Diesel Particulate Filter Systems20 pages
- Form 4 展商资料填报表 Exhibitor Registration FormNo ratings yetForm 4 展商资料填报表 Exhibitor Registration Form5 pages
- Practical Guidelines Inspect Repair HDG Coatings 2008 PDFNo ratings yetPractical Guidelines Inspect Repair HDG Coatings 2008 PDF24 pages

































































































- Service Instructions: PERFECTA 76 / 92 / 115 / 132 / 168 Uc / TVService Instructions: PERFECTA 76 / 92 / 115 / 132 / 168 Uc / TV
- Tribology and Dynamics of Engine and Powertrain Fundamentals Applications and Future TrendsTribology and Dynamics of Engine and Powertrain Fundamentals Applications and Future Trends
- A Seminar Report On "Camless Engine": Cochin University of Science and TechnologyA Seminar Report On "Camless Engine": Cochin University of Science and Technology
- Intelligent Valve Actuation - A Radical New Electro-Magnetic Poppet Valve ArrangementIntelligent Valve Actuation - A Radical New Electro-Magnetic Poppet Valve Arrangement
- 03.flexible Computer Based Control of Ignition and Injection Units of A Gasoline Engine With Skip Cycle Mechanism03.flexible Computer Based Control of Ignition and Injection Units of A Gasoline Engine With Skip Cycle Mechanism
- PDF Camless Engines Seminar Report Compress - PDF 20241117 092928 0000PDF Camless Engines Seminar Report Compress - PDF 20241117 092928 0000
- Scms College of Polytechnics, Vaikkara Shim Underbucket TechnologyScms College of Polytechnics, Vaikkara Shim Underbucket Technology
- Design and Analysis of Cam Shaft For Multi Cylinder EngineDesign and Analysis of Cam Shaft For Multi Cylinder Engine
- "Camless Engine": Visvesvaraya Technological University, Belgaum"Camless Engine": Visvesvaraya Technological University, Belgaum
- Ad Dit LC B Ti E I Advanced Internal Combustion Engines Mae 589V (Spring 2009)Ad Dit LC B Ti E I Advanced Internal Combustion Engines Mae 589V (Spring 2009)
- Efficiency of A New Ic Engine Concept With Variable Piston MotionEfficiency of A New Ic Engine Concept With Variable Piston Motion
- Final-Advance Breaking System For Hill Drive VehiclesFinal-Advance Breaking System For Hill Drive Vehicles
- Term Paper On Fluid Coupling and Torques Converter Converted 1Term Paper On Fluid Coupling and Torques Converter Converted 1
- Pimpri Chinchwad Municipal Corporation, Pimpri-18. Citizen Charter - Marriage RegistrationPimpri Chinchwad Municipal Corporation, Pimpri-18. Citizen Charter - Marriage Registration
- Cylinder Pressure and Combustion Heat Release Estimation Using Nonlinear Sliding ObserversCylinder Pressure and Combustion Heat Release Estimation Using Nonlinear Sliding Observers
- Metallographic Specimen Preparation Basics: by Donald C. Zipperian, Ph.D. Pace TechnologiesMetallographic Specimen Preparation Basics: by Donald C. Zipperian, Ph.D. Pace Technologies
- UK & Ireland Coating Selector: A Guide To The Kingspan Range of CoatingsUK & Ireland Coating Selector: A Guide To The Kingspan Range of Coatings
- Draft: European Standard Norme Europeenne Europaische NormDraft: European Standard Norme Europeenne Europaische Norm
- Practical Guidelines Inspect Repair HDG Coatings 2008 PDFPractical Guidelines Inspect Repair HDG Coatings 2008 PDF