OMNIVIS09
OMNIVIS09
Download as pdf or txt
You might also like
- Dense Visual SLAM For RGB-D CamerasDocument7 pagesDense Visual SLAM For RGB-D CamerasAwais MuhammadNo ratings yet
- Im High Quality Structure ICCV 2015 PaperDocument9 pagesIm High Quality Structure ICCV 2015 PaperGhazlan HishamNo ratings yet
- Large-Scale and Drift-Free Surface Reconstruction Using Online Subvolume RegistrationDocument9 pagesLarge-Scale and Drift-Free Surface Reconstruction Using Online Subvolume RegistrationdewddudeNo ratings yet
- Real-Time Camera Tracking and 3D Reconstruction Using Signed Distance FunctionsDocument8 pagesReal-Time Camera Tracking and 3D Reconstruction Using Signed Distance FunctionsBinh Pham ThanhNo ratings yet
- Real-Time 6-DOF Monocular Visual SLAM in A Large-Scale EnvironmentDocument8 pagesReal-Time 6-DOF Monocular Visual SLAM in A Large-Scale EnvironmentAntonio C. KeithNo ratings yet
- 2012-Dense Reconstruction On The FlyDocument9 pages2012-Dense Reconstruction On The FlyMarcelo VieiraNo ratings yet
- Pose-Guided Diffusion ModelDocument15 pagesPose-Guided Diffusion ModelauserNo ratings yet
- Multi View Environment - Fuhrmann-2014-MVEDocument8 pagesMulti View Environment - Fuhrmann-2014-MVES GuruNo ratings yet
- Dust3R: Geometric 3D Vision Made EasyDocument23 pagesDust3R: Geometric 3D Vision Made Easypaul rodriguez lopezNo ratings yet
- Reconstructing Street-Scenes in Real-Time From A Driving CarDocument8 pagesReconstructing Street-Scenes in Real-Time From A Driving CarSan Lug OmaNo ratings yet
- Digitalisation of Warped Documents Supported by 3D Surface ReconstructionDocument10 pagesDigitalisation of Warped Documents Supported by 3D Surface ReconstructionGus DurNo ratings yet
- Ijciet 09 09 070Document17 pagesIjciet 09 09 070alaawagdybv2No ratings yet
- Realtime Omnidirectional Stereo For Obstacle Detection and Tracking in Dynamic EnvironmentsDocument6 pagesRealtime Omnidirectional Stereo For Obstacle Detection and Tracking in Dynamic Environmentsestraj1954No ratings yet
- Gaze Ma Nip La Ti OnDocument8 pagesGaze Ma Nip La Ti OnSungjin HongNo ratings yet
- Get Out of My Lab: Large-Scale, Real-Time Visual-Inertial LocalizationDocument10 pagesGet Out of My Lab: Large-Scale, Real-Time Visual-Inertial LocalizationSergio CabreraNo ratings yet
- Computer VisionDocument13 pagesComputer VisionPhani NNo ratings yet
- Qualitative Vision-Based Path Following: Zhichao Chen and Stanley T. Birchfield, Senior Member, IEEEDocument6 pagesQualitative Vision-Based Path Following: Zhichao Chen and Stanley T. Birchfield, Senior Member, IEEEJulierme SilvaNo ratings yet
- Rethinking Optical Flow From Geometric Matching Consistent PerspectiveDocument17 pagesRethinking Optical Flow From Geometric Matching Consistent PerspectiveEngineer1990No ratings yet
- 2013 Real-Time 3D Reconstruction in Dynamic Scenes Using Point-Based FusionDocument8 pages2013 Real-Time 3D Reconstruction in Dynamic Scenes Using Point-Based FusionVivian LiNo ratings yet
- 2D-to-3D Photo Rendering For 3D Displays: Comandu@dsi - Unifi.it Atsuto - Maki@crl - Toshiba.co - UkDocument8 pages2D-to-3D Photo Rendering For 3D Displays: Comandu@dsi - Unifi.it Atsuto - Maki@crl - Toshiba.co - UkoidoithatdayNo ratings yet
- Tracking of Industrial Objects by Using CAD Models: October 2007Document10 pagesTracking of Industrial Objects by Using CAD Models: October 2007thanhit08No ratings yet
- Structure-From-Motion in Spherical Video Using The Von Mises-Fisher DistributionDocument13 pagesStructure-From-Motion in Spherical Video Using The Von Mises-Fisher DistributionlaloNo ratings yet
- Design of Panoramic Mosaic Camera Based On FPGA Using Optimal Mosaic AlgorithmDocument8 pagesDesign of Panoramic Mosaic Camera Based On FPGA Using Optimal Mosaic Algorithmhanumantha12No ratings yet
- Multi View Three Dimensional Reconstruction: Advanced Techniques for Spatial Perception in Computer VisionFrom EverandMulti View Three Dimensional Reconstruction: Advanced Techniques for Spatial Perception in Computer VisionNo ratings yet
- 1 s2.0 S0045790622001045 MainDocument15 pages1 s2.0 S0045790622001045 MainfoolloveslifeNo ratings yet
- Robust Odometry Estimation For RGB-D Cameras: Christian Kerl, J Urgen Sturm, and Daniel CremersDocument8 pagesRobust Odometry Estimation For RGB-D Cameras: Christian Kerl, J Urgen Sturm, and Daniel CremersLegna LopezNo ratings yet
- Cube-To-Sphere Projections For Procedural Texturing and BeyondDocument22 pagesCube-To-Sphere Projections For Procedural Texturing and Beyondqrwyy8763876No ratings yet
- 6614 Ijma 01Document19 pages6614 Ijma 01IJMAJournalNo ratings yet
- KleinMurray2007ISMAR PDFDocument10 pagesKleinMurray2007ISMAR PDFjoaofaroNo ratings yet
- A Real-Time Compact Structured-Light Based RangeDocument10 pagesA Real-Time Compact Structured-Light Based Rangesyed hasan alaviNo ratings yet
- A New Approach To Image-Based Realistic Architecture ModelingDocument10 pagesA New Approach To Image-Based Realistic Architecture ModelingPlavo MoreNo ratings yet
- Visual Features For Vehicle Localization and Ego-Motion EstimationDocument7 pagesVisual Features For Vehicle Localization and Ego-Motion EstimationassdNo ratings yet
- Computer Vision Mesh PaperDocument10 pagesComputer Vision Mesh Papersujaljindal2026No ratings yet
- Real Time TrackingDocument8 pagesReal Time Trackingmaacpie8353No ratings yet
- 73 Rasterization HwImplOfMicropolygonRasterizationDocument9 pages73 Rasterization HwImplOfMicropolygonRasterizationabijoshNo ratings yet
- Yang SANet Scene Agnostic Network For Camera Localization ICCV 2019 PaperDocument10 pagesYang SANet Scene Agnostic Network For Camera Localization ICCV 2019 Papervishalk172No ratings yet
- Automatic Generation of 3D Polygon Maps For Mobile RobotsDocument5 pagesAutomatic Generation of 3D Polygon Maps For Mobile Robotsjesus_larrazabal_salasNo ratings yet
- Dissertation Proposal: Greg Coombe University of North Carolina August 22, 2005Document17 pagesDissertation Proposal: Greg Coombe University of North Carolina August 22, 2005LambertNo ratings yet
- Visual SLAM For Flying Vehicles: Bastian Steder Giorgio Grisetti Cyrill Stachniss Wolfram BurgardDocument5 pagesVisual SLAM For Flying Vehicles: Bastian Steder Giorgio Grisetti Cyrill Stachniss Wolfram BurgardAnjana AravindNo ratings yet
- Using Vanishing Points For Camera CalibrationDocument26 pagesUsing Vanishing Points For Camera CalibrationLucas D.AvilaNo ratings yet
- CNN-SLAM: Real-Time Dense Monocular SLAM With Learned Depth PredictionDocument10 pagesCNN-SLAM: Real-Time Dense Monocular SLAM With Learned Depth PredictionbocailloNo ratings yet
- An Efficient Ceiling View SLAM Using Relational Constraints Between LandmarksDocument11 pagesAn Efficient Ceiling View SLAM Using Relational Constraints Between LandmarksAurel GSNo ratings yet
- Ao 60 31 9790Document9 pagesAo 60 31 9790rezaferidooni00No ratings yet
- An Evaluation of Camera Calibration MethDocument7 pagesAn Evaluation of Camera Calibration Methximena zeballosNo ratings yet
- Term Project ReportDocument8 pagesTerm Project Reportnorthslosh.0oNo ratings yet
- 3D Mapping and Navigation For Autonomous Quadrotor AircraftDocument6 pages3D Mapping and Navigation For Autonomous Quadrotor AircraftErvin DavilaNo ratings yet
- RGB-D Mapping Using Depth Cameras For Dense 3D Modeling of Indoor EnvironmentsDocument2 pagesRGB-D Mapping Using Depth Cameras For Dense 3D Modeling of Indoor EnvironmentsMotín ArNo ratings yet
- Automatic Camera Placement For Image-Based ModelingDocument9 pagesAutomatic Camera Placement For Image-Based ModelingKhoid DiamNo ratings yet
- 3D Reconstruction USING MULTIPLE 2D IMAGESDocument4 pages3D Reconstruction USING MULTIPLE 2D IMAGESKifayat UllahNo ratings yet
- Applsci 12 10602Document15 pagesApplsci 12 10602satwikNo ratings yet
- A Real-Time Image-To-Panorama Registration Approach For BackgroundDocument6 pagesA Real-Time Image-To-Panorama Registration Approach For BackgroundUttapawn AwutpetchNo ratings yet
- Li SECAD-Net Self-Supervised CAD Reconstruction by Learning Sketch-Extrude Operations CVPR 2023 PaperDocument11 pagesLi SECAD-Net Self-Supervised CAD Reconstruction by Learning Sketch-Extrude Operations CVPR 2023 Paper7knhfwr87wNo ratings yet
- Sitzmann 2022 CVPRDocument13 pagesSitzmann 2022 CVPRYan AecNo ratings yet
- 3d Object ReconstructionDocument23 pages3d Object ReconstructionMarius DanduNo ratings yet
- Remote Sensing: Real-Time Orthophoto Mosaicing On Mobile Devices For Sequential Aerial Images With Low OverlapDocument15 pagesRemote Sensing: Real-Time Orthophoto Mosaicing On Mobile Devices For Sequential Aerial Images With Low Overlap673555014qqNo ratings yet
- A Pipelined Architecture For Real-Time Correction of Barrel Distortion in Wide-Angle Camera ImagesDocument9 pagesA Pipelined Architecture For Real-Time Correction of Barrel Distortion in Wide-Angle Camera Imagesart101988No ratings yet
- GP-Recon Online Monocular Neural 3D Reconstruction With Geometric PriorDocument16 pagesGP-Recon Online Monocular Neural 3D Reconstruction With Geometric Priorghfm4kffrmNo ratings yet
- Lyu Learning To Segment 3D Point Clouds in 2D Image Space CVPR 2020 PaperDocument10 pagesLyu Learning To Segment 3D Point Clouds in 2D Image Space CVPR 2020 PaperArmandoNo ratings yet
- Module 1Document45 pagesModule 1SohanNo ratings yet
- 2015 A - Reconfiguration - Strategy - For - Reconfigurable - Cable-Driven - Parallel - RobotsDocument8 pages2015 A - Reconfiguration - Strategy - For - Reconfigurable - Cable-Driven - Parallel - RobotsThanh Hai NguyenNo ratings yet
- Metso Unveils Plant PredictiveDocument4 pagesMetso Unveils Plant PredictiveJuliana AguiarNo ratings yet
- Presentation On MANAGING DIVERSITYDocument11 pagesPresentation On MANAGING DIVERSITYAbhishek KallaNo ratings yet
- Link For Entrance Test Syllabus: Name of Department Course Name LinkDocument10 pagesLink For Entrance Test Syllabus: Name of Department Course Name LinkUmangNo ratings yet
- MonarchNet2 Enterprise Printer Management SystemDocument2 pagesMonarchNet2 Enterprise Printer Management SystemAutoBoss MasterNo ratings yet
- Fuel Injection Pump Housing and Governor (New Scroll Fuel System Effective in Production With 10X5411-UP, 45V36536-UP)Document9 pagesFuel Injection Pump Housing and Governor (New Scroll Fuel System Effective in Production With 10X5411-UP, 45V36536-UP)Hammam al HammamNo ratings yet
- CVT PaperDocument5 pagesCVT Paperapi-664825940No ratings yet
- Justify Trip To ESRIDocument2 pagesJustify Trip To ESRIChristopher PaulNo ratings yet
- EcoGuide Operating-Manual 04 enDocument70 pagesEcoGuide Operating-Manual 04 enrizal pavillarNo ratings yet
- Regular Expressions With UltraeditDocument3 pagesRegular Expressions With Ultraeditelchavodel72No ratings yet
- CryogenicDocument20 pagesCryogenicPune Gas Service TeamNo ratings yet
- Affinity Laws - HVAC Pumps and FansDocument16 pagesAffinity Laws - HVAC Pumps and Fanssumair uddinNo ratings yet
- 04 VerifyDocument68 pages04 Verifyveena_scNo ratings yet
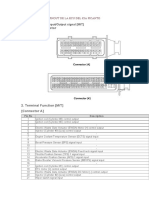
- Pinout de La Ecu Del Kia Picanto 2015Document7 pagesPinout de La Ecu Del Kia Picanto 2015Eitan VAN Muller100% (5)
- SparepartlistDocument1 pageSparepartlistNUR ARIF BIN MD YAMAN / HSAASNo ratings yet
- Vapi Export List2Document9 pagesVapi Export List2Nimesh C VarmaNo ratings yet
- NOTAM - Implementation of ADS-B Over The OceanDocument6 pagesNOTAM - Implementation of ADS-B Over The OceanMartim MartinsNo ratings yet
- Homework 03Document2 pagesHomework 03Shabi HassanNo ratings yet
- Best Practices of Software Engineering: Obj I ObjectivesDocument31 pagesBest Practices of Software Engineering: Obj I ObjectivesDeny KurniawanNo ratings yet
- Edge Banding MachineDocument19 pagesEdge Banding MachineYahia DesignerNo ratings yet
- MSC MEPC.7 Circ.6 DP Qualifications TrainingDocument4 pagesMSC MEPC.7 Circ.6 DP Qualifications TrainingcaptkcNo ratings yet
- KarylleDocument36 pagesKarylleJames Bernard R. BrocalNo ratings yet
- Boneco 2055DDocument12 pagesBoneco 2055DMBAlexNo ratings yet
- Hands-On Functional Pro-Gramming in Rust: Build Modular and Reactive Ap - Plications (True PDFDocument5 pagesHands-On Functional Pro-Gramming in Rust: Build Modular and Reactive Ap - Plications (True PDFteo2005No ratings yet
- Sky WatchDocument3 pagesSky WatchAlicia MGNo ratings yet
- Darrell Dixon Bash Word Resume-1-20-2011Document2 pagesDarrell Dixon Bash Word Resume-1-20-2011Linda BashNo ratings yet
- Dakshina Kannada Medium and Large ScaleDocument3 pagesDakshina Kannada Medium and Large Scaleprasad.i362001No ratings yet
- Handwritten Signature Verification FULLTEXT01Document50 pagesHandwritten Signature Verification FULLTEXT01Tushara.DNo ratings yet
- LTE TroubleshootingDocument27 pagesLTE TroubleshootingNeelabh Krishna91% (11)
- Viruzz Creation Company Profile Version 1.2 PDFDocument21 pagesViruzz Creation Company Profile Version 1.2 PDFmyemail.31121957No ratings yet
- 5G RAN Initial ConfigurationDocument55 pages5G RAN Initial Configurationrazafarhan100% (11)