Assignment 1
Assignment 1
Download as pdf or txt
You might also like
- Assignment 1: Reinforcement Learning Prof. B. RavindranDocument4 pagesAssignment 1: Reinforcement Learning Prof. B. Ravindranudayraj singh100% (2)
- Physics For Scientists and Engineers 3rd Edition Fishbane Solutions ManualDocument20 pagesPhysics For Scientists and Engineers 3rd Edition Fishbane Solutions ManuallafixaNo ratings yet
- Pearson R.PPTX Version 1Document29 pagesPearson R.PPTX Version 1JetmayNo ratings yet
- Cyclotomic Polynomials.Document19 pagesCyclotomic Polynomials.PerepePereNo ratings yet
- 1155 EEE F416 20230524085323 Mid Semester Question PaperDocument2 pages1155 EEE F416 20230524085323 Mid Semester Question Papereducation.servingNo ratings yet
- Ee321a HW6Document2 pagesEe321a HW6Tran Minh QuanNo ratings yet
- Exam MRI02 ELE102 2023Document3 pagesExam MRI02 ELE102 2023nefife8398No ratings yet
- EE - 325 - Sheet 0Document2 pagesEE - 325 - Sheet 0sokr100aaaNo ratings yet
- EE531 Practice Questions - Nov 16, 2015Document9 pagesEE531 Practice Questions - Nov 16, 2015ThiyaguDhanam MohansriRithubaranNo ratings yet
- Sampling and QuantizationDocument2 pagesSampling and Quantizationzakia zerroukiNo ratings yet
- Digital Electronics 1 2022 Test 3 MemoDocument8 pagesDigital Electronics 1 2022 Test 3 MemoSakhile Nhlakanipho ZithaNo ratings yet
- LAB 9 - Multirate SamplingDocument8 pagesLAB 9 - Multirate SamplingM Hassan BashirNo ratings yet
- PBL2 Op-AmpDocument11 pagesPBL2 Op-AmpMinh Ánh TrầnNo ratings yet
- Qbank DSPDocument4 pagesQbank DSPSanjeev AcharNo ratings yet
- Lecture 23 Ece4330tDocument58 pagesLecture 23 Ece4330tmanse yukiNo ratings yet
- Vyboldin - 2019 - J. - Phys. - Conf. - Ser. - 1384 - 012069 PDFDocument6 pagesVyboldin - 2019 - J. - Phys. - Conf. - Ser. - 1384 - 012069 PDFY.VyboldinNo ratings yet
- Emcs - 607P 11-07-2014Document68 pagesEmcs - 607P 11-07-2014abdulbari.abNo ratings yet
- DegitalDocument7 pagesDegitalRICKNo ratings yet
- EE301 FINAL Fall22 Allquestions Ver5Document7 pagesEE301 FINAL Fall22 Allquestions Ver5hasan MD. ShazidNo ratings yet
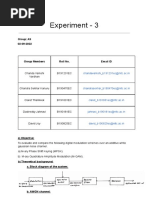
- A9 Exp3Document25 pagesA9 Exp3Chandra Sekhar KanuruNo ratings yet
- 06 Modelling Discrete Control SystemsDocument11 pages06 Modelling Discrete Control SystemsHamilton MupoperiNo ratings yet
- Worksheet #1Document2 pagesWorksheet #1simonkasahun69No ratings yet
- 1.2 Basic Digital Control System: Input To A Controlled SystemDocument22 pages1.2 Basic Digital Control System: Input To A Controlled Systemwondi BETNo ratings yet
- 1155 EEE F416 20230525114734 Comprehensive Exam Question PaperDocument2 pages1155 EEE F416 20230525114734 Comprehensive Exam Question Papereducation.servingNo ratings yet
- MP Unit 1Document8 pagesMP Unit 1nithyaNo ratings yet
- 1.+ENEE+3309+Hashlamoun+Project+Fall 22 23Document1 page1.+ENEE+3309+Hashlamoun+Project+Fall 22 23عبدالرحمن عطاريNo ratings yet
- Matched FilterDocument6 pagesMatched Filter20ELB355 MOHAMMAD ESAAMNo ratings yet
- An5087 PDFDocument9 pagesAn5087 PDFgottdammerNo ratings yet
- Communication Systems HW 2Document3 pagesCommunication Systems HW 2Parsa AseminiaNo ratings yet
- Lab Manual Rev 5 Lab 4 - Amplitude Modulation - 0Document14 pagesLab Manual Rev 5 Lab 4 - Amplitude Modulation - 0FNo ratings yet
- Ec2032 DSP QP End 2024Document7 pagesEc2032 DSP QP End 2024monicaNo ratings yet
- Lab 2Document4 pagesLab 2Risinu WijesingheNo ratings yet
- High Pass FilteringDocument65 pagesHigh Pass Filteringgodidet305No ratings yet
- Assignment4 4Document5 pagesAssignment4 4ARUOS SouraNo ratings yet
- 2023 EC3012D CTS 2 Problem Sheet 2Document2 pages2023 EC3012D CTS 2 Problem Sheet 2B NikethNo ratings yet
- DSP hw3Document3 pagesDSP hw3hadiNo ratings yet
- Ece503 ps04Document5 pagesEce503 ps04Rushabh MehtaNo ratings yet
- Information Theory CodingDocument9 pagesInformation Theory CodingRoshdy AbdelRassoulNo ratings yet
- Examination Paper For TTT4120 Digital Signal Processing: Department of Electronic SystemsDocument7 pagesExamination Paper For TTT4120 Digital Signal Processing: Department of Electronic SystemsSr SeNo ratings yet
- digital 2Document21 pagesdigital 2a7madsala7ussainNo ratings yet
- LAB 11 - Design of Discrete-Time IIR Filters - IDocument8 pagesLAB 11 - Design of Discrete-Time IIR Filters - IM Hassan BashirNo ratings yet
- LAB 8 - Sampling and Reconstruction of SignalsDocument7 pagesLAB 8 - Sampling and Reconstruction of SignalsJahanzaib RanaNo ratings yet
- Mod 4 - 2Document83 pagesMod 4 - 2anuNo ratings yet
- Problem Set 1Document4 pagesProblem Set 1Rushabh Mehta100% (1)
- DSP Lab With Theory III Year ECE B SectionDocument12 pagesDSP Lab With Theory III Year ECE B SectionLokam AvanthikaNo ratings yet
- Exercise 9Document5 pagesExercise 9nani chkhenkeliNo ratings yet
- Digital Communication Lecture-2Document73 pagesDigital Communication Lecture-2Suren D. SalvatoreNo ratings yet
- Lab 3Document7 pagesLab 3ARSLAN HAIDERNo ratings yet
- Experiment No.1 I DSP TMS320C6713 DSK & O DT & Matlab: Lab Manual EEE324 Digital Signal ProcessingDocument14 pagesExperiment No.1 I DSP TMS320C6713 DSK & O DT & Matlab: Lab Manual EEE324 Digital Signal ProcessingMirza Riyasat AliNo ratings yet
- EE 121 - Introduction To Digital Communications Final Exam Practice ProblemsDocument4 pagesEE 121 - Introduction To Digital Communications Final Exam Practice ProblemsNowshin AlamNo ratings yet
- Question Bank SSDocument3 pagesQuestion Bank SSreyannn14No ratings yet
- Rls PaperDocument12 pagesRls Paperaneetachristo94No ratings yet
- Orakel Support Services: Read More About Cheating and Plagiarism HereDocument4 pagesOrakel Support Services: Read More About Cheating and Plagiarism HereSr SeNo ratings yet
- Digital Signal Processing Practical 2Document8 pagesDigital Signal Processing Practical 2ravisankarmurugan217No ratings yet
- Chap7 Digital FilterDocument18 pagesChap7 Digital FilterAzeem AliNo ratings yet
- Channel Equalization For Side Channel AttacksDocument16 pagesChannel Equalization For Side Channel Attackstechshow722No ratings yet
- Chapter Three Source Coding: 1-Sampling TheoremDocument19 pagesChapter Three Source Coding: 1-Sampling Theoremعلو الدوريNo ratings yet
- Active Learning Exercise #1 The LS Optimal Filter: The System Identification ProblemDocument3 pagesActive Learning Exercise #1 The LS Optimal Filter: The System Identification ProblemkleephNo ratings yet
- MUSIC Algorithm ProjectDocument3 pagesMUSIC Algorithm ProjectFrank NguyenNo ratings yet
- Worksheet 20IDocument4 pagesWorksheet 20IMulugeta AlewaNo ratings yet
- Practice 2. Gic: Direccion@ece - Buap.mxDocument4 pagesPractice 2. Gic: Direccion@ece - Buap.mxJose Juan MendozaNo ratings yet
- Get Solution Manual for Launching New Ventures An Entrepreneurial Approach 7th Edition Allen 1305102509 9781305102507 free all chaptersDocument40 pagesGet Solution Manual for Launching New Ventures An Entrepreneurial Approach 7th Edition Allen 1305102509 9781305102507 free all chapterswhabytic100% (18)
- F. Y. B. Sc. (Cmputer Science) Paper I Question BankDocument32 pagesF. Y. B. Sc. (Cmputer Science) Paper I Question BankJash GNo ratings yet
- Elementary ProbabilityDocument25 pagesElementary ProbabilityTAWHID ARMANNo ratings yet
- Table - Coordinate SystemsDocument1 pageTable - Coordinate Systemsrevo32No ratings yet
- Project ExampleDocument19 pagesProject Examplebenjaminxin11No ratings yet
- Statistics 11 Chapter 4 SummativeDocument3 pagesStatistics 11 Chapter 4 SummativeCatalina Perry100% (1)
- Assumptions of The Classical Linear Regression ModelDocument7 pagesAssumptions of The Classical Linear Regression ModelpmackkyNo ratings yet
- MCA Syllabus 2019-22-2Document242 pagesMCA Syllabus 2019-22-2Krishna Randad0% (1)
- Math ENG Gr4 B2Document134 pagesMath ENG Gr4 B2rizwan MohideenNo ratings yet
- Grade 10 Maths 2015Document8 pagesGrade 10 Maths 2015pirimatipenareNo ratings yet
- CT Dimensioning in Low-Impedance Differential Protection PDFDocument20 pagesCT Dimensioning in Low-Impedance Differential Protection PDFRafael Lopez100% (2)
- Eee1 Syllabus 2s0910Document6 pagesEee1 Syllabus 2s0910jaymie_llaneraNo ratings yet
- Chapter 4Document20 pagesChapter 4EricBSNo ratings yet
- Nadia Karima Izzaty 1306369466 Dept. Teknik Sipil: Time Ordinate Effective Rainfall OutputDocument9 pagesNadia Karima Izzaty 1306369466 Dept. Teknik Sipil: Time Ordinate Effective Rainfall OutputNadia Karima100% (1)
- 2014 To 2018 O-Level P1Document264 pages2014 To 2018 O-Level P1BharatonNo ratings yet
- Dca7101 - Probability and StatisticsDocument6 pagesDca7101 - Probability and Statisticsarmaan rathoreNo ratings yet
- 2022 Asme Poster JonDocument1 page2022 Asme Poster Jonjonathan wijayaNo ratings yet
- 9.4 Multiply Divide Rational FunctionsDocument2 pages9.4 Multiply Divide Rational FunctionsBryant Bachelor100% (1)
- Solution - MAT - NTSE STG1 - Delhi - (2015-16) PDFDocument9 pagesSolution - MAT - NTSE STG1 - Delhi - (2015-16) PDFPraveen KumarpillaiNo ratings yet
- 8 3 - Law of Cosine and Sine - Lesson PlanDocument1 page8 3 - Law of Cosine and Sine - Lesson Planapi-215449942No ratings yet
- Polygon: Circuit. The Solid Plane Region, The Bounding Circuit, or The Two Together, May Be Called ADocument52 pagesPolygon: Circuit. The Solid Plane Region, The Bounding Circuit, or The Two Together, May Be Called AeliodefedericoNo ratings yet
- Air Data Computer 3Document172 pagesAir Data Computer 3khidirtayNo ratings yet
- Basic Models of Simultaneous Heat and Mass TransferDocument9 pagesBasic Models of Simultaneous Heat and Mass TransferSaurabh KinareNo ratings yet
- IFEM Ch03Document15 pagesIFEM Ch03Eng AlwardiNo ratings yet
- Software FoxylogicDocument53 pagesSoftware FoxylogicGeraldine AcevedoNo ratings yet
- Plant Structure TutorialDocument48 pagesPlant Structure TutorialAmitabha DebNo ratings yet