Application Characteristics of Permanent Magnet Synchronous Motors (Case Study)
Application Characteristics of Permanent Magnet Synchronous Motors (Case Study)
Download as pdf or txt
You might also like
- Application Characteristics of Permanent Magnet Synchronous and Brushless DC Motors For Servo DrivesDocument11 pagesApplication Characteristics of Permanent Magnet Synchronous and Brushless DC Motors For Servo DrivessambhanimadhubabuNo ratings yet
- DQ InductanceDocument11 pagesDQ Inductancegthulasi789193No ratings yet
- Steady State Analysis of Brushless Doubly Fed Induction Machine Taking Core Loss Into AccountDocument6 pagesSteady State Analysis of Brushless Doubly Fed Induction Machine Taking Core Loss Into AccountnaserhashemniaNo ratings yet
- Dual-Rotor Multiphase Permanent Magnet Machine With Harmonic Injection To Enhance Torque DensityDocument4 pagesDual-Rotor Multiphase Permanent Magnet Machine With Harmonic Injection To Enhance Torque DensitygogjwjNo ratings yet
- Chapter 6 Brushless Motors and ControllersDocument21 pagesChapter 6 Brushless Motors and ControllersFaiz Ahadan Rijalis SirajNo ratings yet
- CCCCCCCCCCCCCCCCCC CCCC CCCCCCCCCCCCC CCCCCCCDocument37 pagesCCCCCCCCCCCCCCCCCC CCCC CCCCCCCCCCCCC CCCCCCCRamani NalajalaNo ratings yet
- Brushless MotorDocument44 pagesBrushless MotorabduljasNo ratings yet
- Permanent Magnet Synchronous MachineDocument7 pagesPermanent Magnet Synchronous MachineSantiago DavidNo ratings yet
- Permanent Magnet Synchronous Motors (PMSM)Document34 pagesPermanent Magnet Synchronous Motors (PMSM)Navdeep KaurNo ratings yet
- Mixer Grinder MotorDocument6 pagesMixer Grinder MotorKkbhuvan KkNo ratings yet
- Modeling Simulation and Analysis of Permanent-Magnet Motor Drives. I. The Permanent-Magnet Synchronous Motor DriveDocument9 pagesModeling Simulation and Analysis of Permanent-Magnet Motor Drives. I. The Permanent-Magnet Synchronous Motor DriveArthur CaiNo ratings yet
- Design and Development of Switched Reluctance Motor For Electric Vehicle ApplicationDocument6 pagesDesign and Development of Switched Reluctance Motor For Electric Vehicle ApplicationjuhiparikhNo ratings yet
- Reliance RPM AC Motors-Optimum Pole ConfigurationDocument10 pagesReliance RPM AC Motors-Optimum Pole ConfigurationKyaw KhNo ratings yet
- Applying PMDC Motors: Product FocusDocument4 pagesApplying PMDC Motors: Product FocusAniesh MahajanNo ratings yet
- Vartanian2009 PDFDocument6 pagesVartanian2009 PDF13sandipNo ratings yet
- Synchronous Motor ThesisDocument6 pagesSynchronous Motor Thesissandyharwellevansville100% (2)
- An Improved Algorithm For Direct Computation of OpDocument11 pagesAn Improved Algorithm For Direct Computation of Optranduchuy141No ratings yet
- Module 4 - 2&16marksDocument22 pagesModule 4 - 2&16markskesavantNo ratings yet
- Vector Control of Permanent Magnet Synchronous MotorDocument51 pagesVector Control of Permanent Magnet Synchronous MotorFAIZAN ALINo ratings yet
- Calculation of Total Current Harmonic Distortion by PWM Method For Permanent Magnet Synchronous MotorsDocument4 pagesCalculation of Total Current Harmonic Distortion by PWM Method For Permanent Magnet Synchronous MotorsShakeel RanaNo ratings yet
- Super-High-Speed Switched Reluctance Motor For Automotive TractionDocument8 pagesSuper-High-Speed Switched Reluctance Motor For Automotive TractionHarshitha AspariNo ratings yet
- Lipo PDFDocument11 pagesLipo PDFjalilemadiNo ratings yet
- Optimal Flux Weakening in Surface PM Machines UsinDocument12 pagesOptimal Flux Weakening in Surface PM Machines UsinakhilnandanNo ratings yet
- Synchronous Drive PerformanceDocument8 pagesSynchronous Drive PerformancehaimantiNo ratings yet
- ConfPaperEPE 2007 PDFDocument9 pagesConfPaperEPE 2007 PDFSelva KumarNo ratings yet
- A Review of The Design Issues and Techniques For Radial-Flux Brush Surface and Internal Rare Earth PM MotorsDocument17 pagesA Review of The Design Issues and Techniques For Radial-Flux Brush Surface and Internal Rare Earth PM MotorsأسامةبوعزيزNo ratings yet
- 492 FerreiraDocument6 pages492 FerreiraRonald LiemNo ratings yet
- BLDCDocument53 pagesBLDCstarboyNo ratings yet
- Finken - Comparison Machines For Hybrid Vehicles PDFDocument5 pagesFinken - Comparison Machines For Hybrid Vehicles PDFOctavian MardaraseviciNo ratings yet
- PM-Synchronous MotorsDocument54 pagesPM-Synchronous MotorsDivyam GargNo ratings yet
- Induction MotorDocument11 pagesInduction Motorisrealuka17No ratings yet
- SEM Subject Impt Two Marks Question With AnswersDocument8 pagesSEM Subject Impt Two Marks Question With AnswersvlkumashankardeekshithNo ratings yet
- DW TechTip Brushless Servo SystemsDocument14 pagesDW TechTip Brushless Servo SystemsgubiliNo ratings yet
- Module 3 - 2&16marksDocument25 pagesModule 3 - 2&16markskesavantNo ratings yet
- Capacitive Power Transfer For Rotor Field Current in Synchronous MachinesDocument8 pagesCapacitive Power Transfer For Rotor Field Current in Synchronous MachinesHuong ThaoNo ratings yet
- MotoringDocument6 pagesMotoringmitsuiNo ratings yet
- A New Energy Optimal Control Scheme For A Separately Excited DC Motor Based Incremental Motion DriveDocument10 pagesA New Energy Optimal Control Scheme For A Separately Excited DC Motor Based Incremental Motion DriveNani KumarNo ratings yet
- Thesis On Switched Reluctance MotorDocument4 pagesThesis On Switched Reluctance Motorbsqxd5g1100% (2)
- Torque Control of Three Phase PMSM Motor by Direct Torque Control Technique and Torque Ripple CancellationDocument7 pagesTorque Control of Three Phase PMSM Motor by Direct Torque Control Technique and Torque Ripple CancellationThiện HàNo ratings yet
- Ijtra1909013 1Document5 pagesIjtra1909013 1parlin76No ratings yet
- Modelling and Simulation of Permanent Magnet Synchronous MotorDocument40 pagesModelling and Simulation of Permanent Magnet Synchronous MotorezeonyechinonsoNo ratings yet
- Trapezoidal Control of BLDC Motors Using Hall Effect SensorsDocument33 pagesTrapezoidal Control of BLDC Motors Using Hall Effect Sensorstoggle123No ratings yet
- Modeling and Simulation of Three Phase Induction Machine Using Written Pole TechnologyDocument7 pagesModeling and Simulation of Three Phase Induction Machine Using Written Pole TechnologyJOHN MINKHANTNo ratings yet
- C1201042329 PDFDocument7 pagesC1201042329 PDFJOHN MINKHANTNo ratings yet
- Permanent Magnet Synchronous MachineDocument8 pagesPermanent Magnet Synchronous MachineWilli Apupalo NaranjoNo ratings yet
- AC Induction Motor SlipDocument6 pagesAC Induction Motor SlipnotastudentNo ratings yet
- Design of A Compact Winding For An Axial-Flux Permanent-Magnet Brushless DC Motor Used in An Electric Two-WheelerDocument3 pagesDesign of A Compact Winding For An Axial-Flux Permanent-Magnet Brushless DC Motor Used in An Electric Two-WheelerhooshyarNo ratings yet
- Simulation Study of Conventional Control Versus MTPA-Based For PMSM ControlDocument4 pagesSimulation Study of Conventional Control Versus MTPA-Based For PMSM Controlpersian67No ratings yet
- Design of A Synchronous Reluctance DriveDocument9 pagesDesign of A Synchronous Reluctance DriveroyourboatNo ratings yet
- Ee6703 Sem Eee Viist Au Unit Ivbldc Lecture NotesDocument25 pagesEe6703 Sem Eee Viist Au Unit Ivbldc Lecture NotesDEEPANo ratings yet
- Speed Control of PMSM Using HALL Signal Effect With Six Pulse Inverter in MATLAB/SIMLINKDocument8 pagesSpeed Control of PMSM Using HALL Signal Effect With Six Pulse Inverter in MATLAB/SIMLINKB.yaswanth KumarNo ratings yet
- Integrated Starter GeneratorDocument9 pagesIntegrated Starter GeneratorThanh NgaNo ratings yet
- THE FULL PAPER by DR Sab Safi of SDT Drives PDFDocument10 pagesTHE FULL PAPER by DR Sab Safi of SDT Drives PDFmohanNo ratings yet
- International Journal of Engineering Research and Development (IJERD)Document7 pagesInternational Journal of Engineering Research and Development (IJERD)IJERDNo ratings yet
- Definition: In: o o o oDocument4 pagesDefinition: In: o o o orevurevathiNo ratings yet
- Study of a reluctance magnetic gearbox for energy storage system applicationFrom EverandStudy of a reluctance magnetic gearbox for energy storage system applicationRating: 1 out of 5 stars1/5 (1)
- Influence of System Parameters Using Fuse Protection of Regenerative DC DrivesFrom EverandInfluence of System Parameters Using Fuse Protection of Regenerative DC DrivesNo ratings yet
- An Efficient Architecture For The Development of Open Cloud Computing BackboneDocument7 pagesAn Efficient Architecture For The Development of Open Cloud Computing BackboneRakeshconclaveNo ratings yet
- Some Statistics of Rain Rate & Rain Attenuation For Tropical & Non Tropical CountriesDocument15 pagesSome Statistics of Rain Rate & Rain Attenuation For Tropical & Non Tropical CountriesRakeshconclaveNo ratings yet
- Arsenic and Heavy Metals in Waters of Oluyole NE, Ibadan SW, NigeriaDocument13 pagesArsenic and Heavy Metals in Waters of Oluyole NE, Ibadan SW, NigeriaRakeshconclaveNo ratings yet
- A Highly Stable 8T SRAM Cell: P.Rama Koteswara Rao and D.Vijaya KumarDocument6 pagesA Highly Stable 8T SRAM Cell: P.Rama Koteswara Rao and D.Vijaya KumarRakeshconclaveNo ratings yet
- Galactic Chemical Evolution and Formation of The AtmosphereDocument16 pagesGalactic Chemical Evolution and Formation of The AtmosphereRakeshconclaveNo ratings yet
- Mesh - Encoding and Decoding: D. Srinivasa Reddy Dr. M. V. Subba Reddy and Dr. B. Jaya Rami ReddyDocument11 pagesMesh - Encoding and Decoding: D. Srinivasa Reddy Dr. M. V. Subba Reddy and Dr. B. Jaya Rami ReddyRakeshconclaveNo ratings yet
- Paper 9Document9 pagesPaper 9RakeshconclaveNo ratings yet
- Causes For Triggered Earthquakes - A Recent Review: R.Samuel Selvaraj and B.UmamaheswariDocument5 pagesCauses For Triggered Earthquakes - A Recent Review: R.Samuel Selvaraj and B.UmamaheswariRakeshconclaveNo ratings yet
- Design and Performance Analysis of 8-Bit RISC Processor Using Xilinx & Microwind ToolDocument10 pagesDesign and Performance Analysis of 8-Bit RISC Processor Using Xilinx & Microwind ToolRakeshconclaveNo ratings yet
- Vibrational Pseudospin Solution (Triglycine Sulphate Crystal) For Computing TechnologyDocument10 pagesVibrational Pseudospin Solution (Triglycine Sulphate Crystal) For Computing TechnologyRakeshconclaveNo ratings yet
- Performance Analysis of VBLAST MIMO-OFDM System For Intelligent Transportation SystemDocument9 pagesPerformance Analysis of VBLAST MIMO-OFDM System For Intelligent Transportation SystemRakeshconclaveNo ratings yet
- On The Security of An Efficient Time-Bound Hierarchical Key Management Scheme With BiometricsDocument3 pagesOn The Security of An Efficient Time-Bound Hierarchical Key Management Scheme With BiometricsRakeshconclaveNo ratings yet
- ARM: Advanced File Replication and Consistency Maintenance in P2P SystemDocument5 pagesARM: Advanced File Replication and Consistency Maintenance in P2P SystemRakeshconclaveNo ratings yet
- Noise Figure Measurement in Mobile Radio EnvironmentDocument7 pagesNoise Figure Measurement in Mobile Radio EnvironmentRakeshconclaveNo ratings yet
- A Review On Invasion in Ad Hoc Networks and Its Detection ProceduresDocument10 pagesA Review On Invasion in Ad Hoc Networks and Its Detection ProceduresRakeshconclaveNo ratings yet
- Enabling Public Auditability For Cloud Data Storage SecurityDocument5 pagesEnabling Public Auditability For Cloud Data Storage SecurityRakeshconclaveNo ratings yet
- Enhanced Video Search Using Multimodal Fusion With CR RerankingDocument5 pagesEnhanced Video Search Using Multimodal Fusion With CR RerankingRakeshconclaveNo ratings yet
- Applying Gene Grouping Genetic Algorithm For Solving Travelling Salesman ProblemDocument5 pagesApplying Gene Grouping Genetic Algorithm For Solving Travelling Salesman ProblemRakeshconclaveNo ratings yet
- Probabilistic Data Deduplication Using Modern Backup OperationDocument5 pagesProbabilistic Data Deduplication Using Modern Backup OperationRakeshconclaveNo ratings yet
- Paper 4Document7 pagesPaper 4RakeshconclaveNo ratings yet
- Mesh Completion Using Incomplete Mesh and Template Model: D. Srinivasa Reddy Dr. M. V. Subba ReddyDocument6 pagesMesh Completion Using Incomplete Mesh and Template Model: D. Srinivasa Reddy Dr. M. V. Subba ReddyRakeshconclaveNo ratings yet
- Using Local Histogram and FCM Technique For Object Extraction in Semen Sample Microscopic Images, Based On Mathematical MorphologyDocument4 pagesUsing Local Histogram and FCM Technique For Object Extraction in Semen Sample Microscopic Images, Based On Mathematical MorphologyRakeshconclaveNo ratings yet
- A Survey On Network Layer Attacks On Mobile Ad-Hoc NetworksDocument6 pagesA Survey On Network Layer Attacks On Mobile Ad-Hoc NetworksRakeshconclaveNo ratings yet
- Solution of Transonic Gas Equation by Using Symmetry GroupsDocument7 pagesSolution of Transonic Gas Equation by Using Symmetry GroupsRakeshconclaveNo ratings yet
- Jamming and Network Restoration On Multi Channel Wireless Sensor NetworksDocument5 pagesJamming and Network Restoration On Multi Channel Wireless Sensor NetworksRakeshconclaveNo ratings yet
- Paper 2Document9 pagesPaper 2RakeshconclaveNo ratings yet
- Paper 13Document7 pagesPaper 13RakeshconclaveNo ratings yet
- Color Image Techniques For Image Retrieval in Large Image Set of DatabaseDocument10 pagesColor Image Techniques For Image Retrieval in Large Image Set of DatabaseRakeshconclaveNo ratings yet
- Paper 8Document7 pagesPaper 8RakeshconclaveNo ratings yet
- Linear and Nonlinear Stability of Couple-Stress Fluid Heated From Below Under The Effect of RotationDocument10 pagesLinear and Nonlinear Stability of Couple-Stress Fluid Heated From Below Under The Effect of RotationRakeshconclaveNo ratings yet
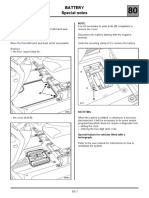
- Nissan Primastar X83 (2002-2006) Service Manual #17Document256 pagesNissan Primastar X83 (2002-2006) Service Manual #17János Závogyán50% (2)
- 50 πa (175 cc - s) (250G) 50 π (0.9 cm) : E= QB E= E=309 uVDocument26 pages50 πa (175 cc - s) (250G) 50 π (0.9 cm) : E= QB E= E=309 uVNida Bagoyboy NatichoNo ratings yet
- Bucher Ph.D.dissDocument221 pagesBucher Ph.D.dissTaina BucherNo ratings yet
- 612-Information Flow in Multi-Disciplinary Civil Engineering Project Design Teams IGLC18 V4-Libre PDFDocument21 pages612-Information Flow in Multi-Disciplinary Civil Engineering Project Design Teams IGLC18 V4-Libre PDFSree NivasNo ratings yet
- Dual Nature of Matter and Radiation-Notes-Iit-Jee - pdf-65Document7 pagesDual Nature of Matter and Radiation-Notes-Iit-Jee - pdf-65SRITIKANTA RAYNo ratings yet
- sl44 - Kannad - Elt - SBDocument4 pagessl44 - Kannad - Elt - SBNickNo ratings yet
- Em LightDocument4 pagesEm LightwmaheshNo ratings yet
- P.arumugam C.VDocument4 pagesP.arumugam C.VrevathisudhaNo ratings yet
- ECSE 200 - Electric CircuitsDocument5 pagesECSE 200 - Electric CircuitsAlainNo ratings yet
- Auto3D Kit User's Manual - ENGDocument17 pagesAuto3D Kit User's Manual - ENGAnand GovindarajNo ratings yet
- Hazard Identification Risk Assessment and Control Measures For MHFDocument46 pagesHazard Identification Risk Assessment and Control Measures For MHFgrandeNo ratings yet
- Performance Qualification PQ GuidlineDocument8 pagesPerformance Qualification PQ Guidlinejanu1211100% (1)
- GB 1400Document1 pageGB 1400Jury ZanniNo ratings yet
- Hive Tutorial PDFDocument14 pagesHive Tutorial PDFbewithyou2003No ratings yet
- Design QualificationDocument16 pagesDesign QualificationDoan Chi Thien85% (13)
- Despiece SUSP. DEL 930EDocument2 pagesDespiece SUSP. DEL 930EAndersson Campos VásquezNo ratings yet
- A Design Approach & Selected Wind-Tunnel Results at High Subsonic Speeds For Wing-Tip Mounted Winglets PDFDocument33 pagesA Design Approach & Selected Wind-Tunnel Results at High Subsonic Speeds For Wing-Tip Mounted Winglets PDFsubha_aeroNo ratings yet
- Piping and Instrumentation Diagram For HPU: Adcop - Abu Dhabi Crude Oil Pipeline Project Habshan - FujairahDocument4 pagesPiping and Instrumentation Diagram For HPU: Adcop - Abu Dhabi Crude Oil Pipeline Project Habshan - FujairahAdityaNo ratings yet
- Determing Calculation For Repair of Storage TankDocument4 pagesDeterming Calculation For Repair of Storage TankHendra Yudistira100% (2)
- Circuit DesignDocument90 pagesCircuit DesignsaiNo ratings yet
- SMC-ISA3-19-3 Digital Gap CheckDocument16 pagesSMC-ISA3-19-3 Digital Gap Checkquang vinhNo ratings yet
- Rota Disc OPERATORS MANUALDocument53 pagesRota Disc OPERATORS MANUALCoco BangoNo ratings yet
- External Level of IMSDocument6 pagesExternal Level of IMSBoobalan R100% (1)
- SwareDocument2 pagesSwareBradley JacksonNo ratings yet
- Eaton Internormen Stainless Steel FiltersDocument2 pagesEaton Internormen Stainless Steel FiltersEaton FiltrationNo ratings yet
- Adams ValveDocument5 pagesAdams ValveSuresh KumarNo ratings yet
- Pressure Gauge TemplateDocument1 pagePressure Gauge TemplateUTKARSH GADVENo ratings yet
- Oscillatory Motion: X X 0 X MDocument12 pagesOscillatory Motion: X X 0 X Mp_k_soni_iit_physicsNo ratings yet
- Pulastic SP Track 160 (Indoors - Multi Directional)Document4 pagesPulastic SP Track 160 (Indoors - Multi Directional)Halil GüneyNo ratings yet
- Baumer Bourdon BR EN 1506 11128030 PDFDocument12 pagesBaumer Bourdon BR EN 1506 11128030 PDFINZAMAM MUSHTAQNo ratings yet