IEEE MVC 2023 Final 20221125 CopyrightAccepted
IEEE MVC 2023 Final 20221125 CopyrightAccepted
Download as pdf or txt
You might also like
- Modeling, Simulation, and Analysis of Hybrid Electric Vehicle Using MATLAB Simulink2Document5 pagesModeling, Simulation, and Analysis of Hybrid Electric Vehicle Using MATLAB Simulink2SureshNo ratings yet
- V 81 N 183 A 10Document11 pagesV 81 N 183 A 10Sergio M. WerleNo ratings yet
- Mechanical Engineering and SciencesDocument11 pagesMechanical Engineering and ScienceswarnoiseNo ratings yet
- Torque Vectoring For Electric Vehicles With Individually Controlled Motors: State-of-the-Art and Future DevelopmentsDocument12 pagesTorque Vectoring For Electric Vehicles With Individually Controlled Motors: State-of-the-Art and Future DevelopmentseldincelebicNo ratings yet
- Modelling and Simulation of Electric and Hybrid Electric VehiclesDocument6 pagesModelling and Simulation of Electric and Hybrid Electric VehiclesYaz BentancourNo ratings yet
- A MATLAB Simulink Model For Toyota Prius 2004 Based On DOE ReportsDocument9 pagesA MATLAB Simulink Model For Toyota Prius 2004 Based On DOE ReportssifoouNo ratings yet
- Model Based Development of Future Small Electric Vehicle by ModelicaDocument8 pagesModel Based Development of Future Small Electric Vehicle by ModelicashubhamformeNo ratings yet
- JCAMECH Volume 54 Issue 4 Pages 607-622Document16 pagesJCAMECH Volume 54 Issue 4 Pages 607-622Nguyen KhaiNo ratings yet
- Modeling Simulation and Energy-Flow Study of A Battery Electric Vehicle in LabviewDocument7 pagesModeling Simulation and Energy-Flow Study of A Battery Electric Vehicle in LabviewhemaNo ratings yet
- Parallel HEV Hybrid Controller Modeling For Power ManagementDocument7 pagesParallel HEV Hybrid Controller Modeling For Power ManagementIago HenriqueNo ratings yet
- AndredeSousa ExtendedAbstractDocument10 pagesAndredeSousa ExtendedAbstractabidparipurnaNo ratings yet
- Fuzzy Logic Controller For Parallel Plug-In Hybrid VehicleDocument14 pagesFuzzy Logic Controller For Parallel Plug-In Hybrid Vehiclep.coding063No ratings yet
- Improved DTC Strategy of An Electric Vehicle With Four In-Wheels Induction Motor Drive 4WDEV Using Fuzzy Logic ControlDocument12 pagesImproved DTC Strategy of An Electric Vehicle With Four In-Wheels Induction Motor Drive 4WDEV Using Fuzzy Logic ControlInternational Journal of Power Electronics and Drive SystemsNo ratings yet
- HEV V-Elph 2Document9 pagesHEV V-Elph 2api-3709675No ratings yet
- Design and Development of The Hybrid-Electric Vehicle by Achieving The Best Operating Performance and Highest EfficiencyDocument7 pagesDesign and Development of The Hybrid-Electric Vehicle by Achieving The Best Operating Performance and Highest EfficiencyДрагана КрстевскаNo ratings yet
- Optimal Torque Split Strategy of Dual-Motor ElectrDocument21 pagesOptimal Torque Split Strategy of Dual-Motor Electrquang caoNo ratings yet
- Direct Torque Control Versus Indirect Field-Oriented Control of Induction Motors For Electric Vehicle ApplicationsDocument10 pagesDirect Torque Control Versus Indirect Field-Oriented Control of Induction Motors For Electric Vehicle ApplicationsVishal ThakurNo ratings yet
- FINALVERSIONDocument12 pagesFINALVERSIONquang caoNo ratings yet
- Modelling of Electric Vehicles Using MatlabDocument10 pagesModelling of Electric Vehicles Using MatlabHiếu Hoàng TrungNo ratings yet
- 2008-01-0085 - Model - Based - Design - HEV - Final - 1 10 08 PDFDocument10 pages2008-01-0085 - Model - Based - Design - HEV - Final - 1 10 08 PDFrathorsumit2006No ratings yet
- A Study of Converting A Conventional Vehicle Into An Electric VehicleDocument6 pagesA Study of Converting A Conventional Vehicle Into An Electric VehicleLit LeNo ratings yet
- Maplesoft ISKO Designing HEVs Using OptimizationstrategiesDocument17 pagesMaplesoft ISKO Designing HEVs Using Optimizationstrategiesfaizshaikh101101No ratings yet
- Eleves: A New Software Tool For Electric Vehicle Modeling and SimulationDocument8 pagesEleves: A New Software Tool For Electric Vehicle Modeling and Simulationakhil nigamNo ratings yet
- Model Based System Design For Electric Vehicle ConDocument19 pagesModel Based System Design For Electric Vehicle ConAmanuelAlemaNo ratings yet
- Optimal Component Sizing of A Four-Wheel Independently Actuated ElectricDocument17 pagesOptimal Component Sizing of A Four-Wheel Independently Actuated ElectricSmmj SmmjNo ratings yet
- Hadboul 2021 IOP Conf. Ser. Mater. Sci. Eng. 1105 012022Document11 pagesHadboul 2021 IOP Conf. Ser. Mater. Sci. Eng. 1105 012022Luong Ngoc MinhNo ratings yet
- Power Management Strategy For Parallel Hybrid Electric VehiclesDocument6 pagesPower Management Strategy For Parallel Hybrid Electric VehiclesGaurav DeshmukhNo ratings yet
- Paper 2 PDFDocument6 pagesPaper 2 PDFSwati NikamNo ratings yet
- Comparison Between Parallel Hybrid ConceptsDocument11 pagesComparison Between Parallel Hybrid ConceptsDon ReloNo ratings yet
- Model-Based Design For Hybrid Electric Vehicle SystemsDocument10 pagesModel-Based Design For Hybrid Electric Vehicle Systemssharmamohana19946511No ratings yet
- Mathematical Modelling and Simulation of Electric Vehicle Using Matlab-SimulinkDocument10 pagesMathematical Modelling and Simulation of Electric Vehicle Using Matlab-SimulinkZAGAOUCH RedouaneNo ratings yet
- Simulation of BLDC Motor Drive Systems For ElectriDocument5 pagesSimulation of BLDC Motor Drive Systems For ElectriMinh Điền PhanNo ratings yet
- SAE 42 Volt PaperDocument7 pagesSAE 42 Volt PaperWilliam KibbeNo ratings yet
- Cas 6849Document22 pagesCas 6849tripleayear5No ratings yet
- Simulation Model of A Military HEV With A Highly Redundant ArchitectureDocument10 pagesSimulation Model of A Military HEV With A Highly Redundant ArchitectureSekwah HawkesNo ratings yet
- A State-Of-The-Art Review On Torque Distribution Strategies AimedDocument15 pagesA State-Of-The-Art Review On Torque Distribution Strategies AimedSmmj SmmjNo ratings yet
- Edt Seminar ReportDocument10 pagesEdt Seminar Reportinteresting facts in worldNo ratings yet
- Sliding Mode Based Powertrain Control For Efficiency Improvement in Series Hybrid-Electric VehiclesDocument12 pagesSliding Mode Based Powertrain Control For Efficiency Improvement in Series Hybrid-Electric Vehicles시드세흐리아르알리나크비No ratings yet
- Designing Energy Efficient Traction Machines For Electric and Hybrid VehiclesDocument9 pagesDesigning Energy Efficient Traction Machines For Electric and Hybrid VehicleskodeegNo ratings yet
- Virtual Prototyping of An Electric Power Steering SimulatorDocument10 pagesVirtual Prototyping of An Electric Power Steering SimulatorBalajiNo ratings yet
- Power Losses and Energy Efficiency of Multi-Wheel Drive VehiclesDocument12 pagesPower Losses and Energy Efficiency of Multi-Wheel Drive VehiclesDeepak KayNo ratings yet
- 224 AbstractPaperFileIEOMDocument9 pages224 AbstractPaperFileIEOMAbdisa BirUKNo ratings yet
- MEPCON 2019 Paper 188Document7 pagesMEPCON 2019 Paper 188SanjayNo ratings yet
- Plug-In Hybrid Electric Vehicle Control Strategy Parameter OptimizationDocument14 pagesPlug-In Hybrid Electric Vehicle Control Strategy Parameter OptimizationPrateesh RajNo ratings yet
- 1.2 Introduction of Electrical Machines, Drive Systems, and Their Applications 5Document16 pages1.2 Introduction of Electrical Machines, Drive Systems, and Their Applications 5gurunathan14No ratings yet
- Vehicles 06 00023Document30 pagesVehicles 06 00023vikram29586No ratings yet
- Adaptive Multiresolution Energy Consumption Prediction For Electric VehiclesDocument11 pagesAdaptive Multiresolution Energy Consumption Prediction For Electric VehiclesMuhammed AlhanoutiNo ratings yet
- Modeling and Simulation of EV HEV PDFDocument17 pagesModeling and Simulation of EV HEV PDFshawn liNo ratings yet
- Article StudyDocument16 pagesArticle StudymounaNo ratings yet
- E3sconf Icregcsd2023 01006Document12 pagesE3sconf Icregcsd2023 01006kanchanmshinde2000No ratings yet
- Analysis and Design of A Functional Electric Motorcycle PrototypeDocument6 pagesAnalysis and Design of A Functional Electric Motorcycle PrototypearielguerreroNo ratings yet
- Transportation Research Part D: Konstantinos N. Genikomsakis, Georgios MitrentsisDocument21 pagesTransportation Research Part D: Konstantinos N. Genikomsakis, Georgios MitrentsisEdwin SilvaNo ratings yet
- Electric Vehicle Drive Simulation With MATLAB/SimulinkDocument24 pagesElectric Vehicle Drive Simulation With MATLAB/SimulinkSingam SridharNo ratings yet
- Comparison of Early-Stage Design Methods For A Two-Mode Hybrid Electric VehicleDocument6 pagesComparison of Early-Stage Design Methods For A Two-Mode Hybrid Electric Vehiclejin11004No ratings yet
- Fuzzy 20 Logic 20 Control 20 For 20 Parallel 20 Hybrid 20 VehiclesDocument10 pagesFuzzy 20 Logic 20 Control 20 For 20 Parallel 20 Hybrid 20 VehiclesSmokeysGarageNo ratings yet
- Gun A Balan 2015Document6 pagesGun A Balan 2015Lava KumarNo ratings yet
- Simulation Analysis of Dynamical Performance and eDocument9 pagesSimulation Analysis of Dynamical Performance and eFolix AckahNo ratings yet
- Introduction to Hybrid Vehicle System Modeling and ControlFrom EverandIntroduction to Hybrid Vehicle System Modeling and ControlRating: 4 out of 5 stars4/5 (1)
- Advances in Motion Sensing and Control for Robotic Applications: Selected Papers from the Symposium on Mechatronics, Robotics, and Control (SMRC’18)- CSME International Congress 2018, May 27-30, 2018 Toronto, CanadaFrom EverandAdvances in Motion Sensing and Control for Robotic Applications: Selected Papers from the Symposium on Mechatronics, Robotics, and Control (SMRC’18)- CSME International Congress 2018, May 27-30, 2018 Toronto, CanadaFarrokh Janabi-SharifiNo ratings yet
- Energy and Thermal Management, Air-Conditioning, and Waste Heat Utilization: 2nd ETA Conference, November 22-23, 2018, Berlin, GermanyFrom EverandEnergy and Thermal Management, Air-Conditioning, and Waste Heat Utilization: 2nd ETA Conference, November 22-23, 2018, Berlin, GermanyChristine JuniorNo ratings yet
- TimelineDocument32 pagesTimelinegoogols7521No ratings yet
- Manual Completo Sinovo SD600Document221 pagesManual Completo Sinovo SD600Felipe de PaulaNo ratings yet
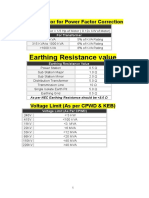
- Earthing Resistance Value: Size of Capacitor For Power Factor CorrectionDocument17 pagesEarthing Resistance Value: Size of Capacitor For Power Factor Correctiondhruv100% (2)
- Failure Mode and Effects Analysis of Hotwell System Motor Operated Butterfly ValveDocument19 pagesFailure Mode and Effects Analysis of Hotwell System Motor Operated Butterfly ValveBalan SelvanNo ratings yet
- Gearmotors: Achieving The Perfect Motor & Gearbox Match: Deeper InsightsDocument16 pagesGearmotors: Achieving The Perfect Motor & Gearbox Match: Deeper InsightsRadu BadoiuNo ratings yet
- User Manual 345Document5 pagesUser Manual 345AmirulHanif AlyahyaNo ratings yet
- MERCEDES S-560-EDocument5 pagesMERCEDES S-560-EOSCAR BARRERA DOBLADONo ratings yet
- Fabrication of Mini Conveyor Using Mechanical (Geneva) Mechanism4Document14 pagesFabrication of Mini Conveyor Using Mechanical (Geneva) Mechanism4Nilesh patilNo ratings yet
- Vibration Diagnostic ChartDocument49 pagesVibration Diagnostic ChartAlex George100% (4)
- Zigbee Based Speed ControlDocument68 pagesZigbee Based Speed Controlbvkarthik2711No ratings yet
- ECO.32 ManualDocument24 pagesECO.32 Manualcharles cashNo ratings yet
- Calculations of Short Circuit CurrentsDocument9 pagesCalculations of Short Circuit CurrentsCorneliusmusyokaNo ratings yet
- VVVF Inverter InstructionDocument14 pagesVVVF Inverter InstructionХамит Фатхлисламов100% (2)
- ABB Drive and Motor Selector ACS880-04 Module PDFDocument3 pagesABB Drive and Motor Selector ACS880-04 Module PDFBataa BatsuuriNo ratings yet
- 2009 PD Plus 1200 ManualDocument60 pages2009 PD Plus 1200 ManualRoberto Carlos Campos MitoNo ratings yet
- Super Efficient AC - DaikinDocument35 pagesSuper Efficient AC - DaikinSaravanan SengazhaniNo ratings yet
- Count Description CR 10-5 A-A-A-E-HQQE: Product Photo Could Vary From The Actual ProductDocument4 pagesCount Description CR 10-5 A-A-A-E-HQQE: Product Photo Could Vary From The Actual Productdedy setiawanNo ratings yet
- Pt. Kartika Sistim Indag: Motor Data ReferencesDocument15 pagesPt. Kartika Sistim Indag: Motor Data Referencesika yuliyani murtiharjonoNo ratings yet
- CP18 ManualDocument72 pagesCP18 Manualkomalinternational5No ratings yet
- Steering Mechanism of Autonomous VehicleDocument27 pagesSteering Mechanism of Autonomous VehicleChetan SwaroopNo ratings yet
- User's ManualDocument42 pagesUser's ManualSupriya ManojNo ratings yet
- ch1 DC MachineDocument134 pagesch1 DC MachineniteshNo ratings yet
- Lecture 2 Railway ElectrificationDocument51 pagesLecture 2 Railway ElectrificationMaalmalan Keekiyyaa100% (1)
- 590 Series DC DrivesDocument6 pages590 Series DC DrivesCidronia GomesNo ratings yet
- HDP Serie Installation Operation and Maintenance ManualDocument68 pagesHDP Serie Installation Operation and Maintenance ManualMar CrucisNo ratings yet
- Flux & FluxMotor New Features 12.2Document88 pagesFlux & FluxMotor New Features 12.2luis900000No ratings yet
- Motor Data: Datasheet For SIMOGEAR Geared Motors Article No.: 2KJ3510-9EK23-4CP1-ZDocument3 pagesMotor Data: Datasheet For SIMOGEAR Geared Motors Article No.: 2KJ3510-9EK23-4CP1-ZAlexis InfanteNo ratings yet
- Philosophy Protn Coordination OldDocument14 pagesPhilosophy Protn Coordination OldsalmanNo ratings yet
- Profiles of Hyundai Elevator (2007) - 200787Document18 pagesProfiles of Hyundai Elevator (2007) - 200787Chang ChangNo ratings yet
- Ezi SERVO - Plus R - Manual User PDFDocument80 pagesEzi SERVO - Plus R - Manual User PDFNguyễn Văn ThắngNo ratings yet