Basic Bioinstrumentation Systems
Basic Bioinstrumentation Systems
Download as pdf or txt
You might also like
- Application Note Matlab Calls CSTDocument6 pagesApplication Note Matlab Calls CSTsmriti127100% (4)
- Essilor 2015 Range GuideDocument226 pagesEssilor 2015 Range GuideharidwNo ratings yet
- Files 2-Chapters Chapter 6 Electrical and Electromechanical Systems 2Document19 pagesFiles 2-Chapters Chapter 6 Electrical and Electromechanical Systems 2Naveen KrishnaNo ratings yet
- Ee303 1Document10 pagesEe303 1api-288751705No ratings yet
- Chapter 2 DC Circuit TheoryDocument37 pagesChapter 2 DC Circuit TheoryTynoh MusukuNo ratings yet
- Chapter 2: DC Circuit TheoryDocument37 pagesChapter 2: DC Circuit TheoryTaonga Nhambi100% (1)
- EC-IIDocument17 pagesEC-IIAnikendu MaitraNo ratings yet
- 2-Chapters Chapter 6 Electrical and Electromechanical Systems 2Document21 pages2-Chapters Chapter 6 Electrical and Electromechanical Systems 2Krushnasamy SuramaniyanNo ratings yet
- Electrical Components and Circuits Not MineDocument21 pagesElectrical Components and Circuits Not MineMark Cliffton BadlonNo ratings yet
- Electronics Engineering Notes Unit 1st YearDocument11 pagesElectronics Engineering Notes Unit 1st Yearmahvs.1311No ratings yet
- Basic Writing Skill TxtbookDocument16 pagesBasic Writing Skill Txtbookyacob sozoNo ratings yet
- Chapter02Document26 pagesChapter02ahmedamer0aa0No ratings yet
- Theories of Electric Circuit AnalysisDocument11 pagesTheories of Electric Circuit AnalysisKhaled IbrahimNo ratings yet
- Ch-2 Electrical Circuit Anlysis-PART 1Document44 pagesCh-2 Electrical Circuit Anlysis-PART 1temesgen adugnaNo ratings yet
- Chapter 1Document20 pagesChapter 1cherkos weldayNo ratings yet
- BEEE - Part a - Unit I - DC & AC CircuitsDocument46 pagesBEEE - Part a - Unit I - DC & AC Circuitsthrishareddy112No ratings yet
- E109 - AgustinDocument25 pagesE109 - AgustinSeth Jarl G. AgustinNo ratings yet
- Network Analysis Chap.1 KVL & KCL - pdf-1Document34 pagesNetwork Analysis Chap.1 KVL & KCL - pdf-1thanu100% (2)
- Module1 1Document46 pagesModule1 1Disha GoyalNo ratings yet
- Topics To Be Covered: Unit-2: Basic Circuit ElementsDocument11 pagesTopics To Be Covered: Unit-2: Basic Circuit ElementsParthaNo ratings yet
- Module 1 - BEE - DC Circuits & Electromagnetic InductionDocument21 pagesModule 1 - BEE - DC Circuits & Electromagnetic InductionSanjay SNo ratings yet
- 04 Basic Electrical, Electronics and Measurement EngineeringDocument82 pages04 Basic Electrical, Electronics and Measurement EngineeringkrishnandrkNo ratings yet
- Chapter 1 Basic ElectricityDocument26 pagesChapter 1 Basic ElectricityBirhex FeyeNo ratings yet
- RLC Series-Parallel Circuit AnalysisDocument2 pagesRLC Series-Parallel Circuit AnalysisShah Zeb Yousafzai100% (1)
- BEEE Quick NotesDocument83 pagesBEEE Quick Notespriyazoe54No ratings yet
- EIS Nota AC-1 EG&GDocument13 pagesEIS Nota AC-1 EG&GHarry MarshallNo ratings yet
- Network Analysis: by Mrs - Eranki Laita Mrs Jyoti MaheshwariDocument47 pagesNetwork Analysis: by Mrs - Eranki Laita Mrs Jyoti Maheshwarilalitaeranki100% (1)
- BEEM 2marks PDFDocument40 pagesBEEM 2marks PDFPragna Sidhireddy100% (1)
- UNIT 1 (3)Document46 pagesUNIT 1 (3)Risika SinghNo ratings yet
- Chapter 2Document17 pagesChapter 2ahmedherohero9No ratings yet
- BEE - EEE - B22EE0101 - Unit 1 - NotesDocument46 pagesBEE - EEE - B22EE0101 - Unit 1 - NotesKhaushik KumaarNo ratings yet
- DC and Ac NetworksDocument12 pagesDC and Ac NetworksEzekiel JamesNo ratings yet
- Module 1 DC Circuits (Part - 2)Document14 pagesModule 1 DC Circuits (Part - 2)Sattwik MannaNo ratings yet
- ABC of Battery TestingDocument18 pagesABC of Battery TestingAbid HussainNo ratings yet
- Unit I - NotesDocument42 pagesUnit I - NotesPrashant DandadeNo ratings yet
- Circuit Lab Report 2Document8 pagesCircuit Lab Report 2aeshahalmutairi4No ratings yet
- WWW Universityquestions inDocument63 pagesWWW Universityquestions inRajgir Raj100% (1)
- GEL104 DC CircuitsDocument25 pagesGEL104 DC CircuitsBhupender Singh ChughNo ratings yet
- Unit 2Document11 pagesUnit 2abhimanyukr00003No ratings yet
- 2 Ohm's Law: ExperimentDocument25 pages2 Ohm's Law: ExperimentAkshay PabbathiNo ratings yet
- BEEE NotesDocument8 pagesBEEE NotesSrinathReddyNo ratings yet
- الدوائر الكهربائية من 1 لغاية 8 1Document60 pagesالدوائر الكهربائية من 1 لغاية 8 1abbas00170No ratings yet
- Basics of Power SystemsDocument63 pagesBasics of Power SystemsAravind BalaNo ratings yet
- BE3251-BASIC ELECTRICAL AND ELECTRONICS ENGINEERING-985171954-BE 3251 BEEE NotesDocument64 pagesBE3251-BASIC ELECTRICAL AND ELECTRONICS ENGINEERING-985171954-BE 3251 BEEE NotesJemima ANo ratings yet
- General Physics 2: Grade 12Document53 pagesGeneral Physics 2: Grade 12Del Mundo, Jelo ArsuaNo ratings yet
- DC Network - 6 - 26 - 18Document61 pagesDC Network - 6 - 26 - 18Neli Aguilar SenupeNo ratings yet
- Eee Chapter-2Document4 pagesEee Chapter-2JANAPANA TIRUMALA RAONo ratings yet
- Current ElectricityDocument10 pagesCurrent ElectricityClemence TafitiNo ratings yet
- ETE 1112 - Basic Electrical Engineering Lab ManualDocument27 pagesETE 1112 - Basic Electrical Engineering Lab ManualSabuj Ahmed100% (1)
- Chapter 1 - Basic Concepts in Electrical TechnologyDocument31 pagesChapter 1 - Basic Concepts in Electrical TechnologyDouglas OngomNo ratings yet
- Basic Electrical LabDocument32 pagesBasic Electrical Labsrinu247No ratings yet
- Unit 1 - Network Analysis - WWW - Rgpvnotes.inDocument17 pagesUnit 1 - Network Analysis - WWW - Rgpvnotes.inmishranitesh25072004No ratings yet
- Circuit Chapter One and TwoDocument44 pagesCircuit Chapter One and Twokalkidaneb21No ratings yet
- Chapter 1Document48 pagesChapter 1bekeledamtew6No ratings yet
- 0.circuit VariableDocument17 pages0.circuit Variablemehmet kayacanNo ratings yet
- Basic Electronics Terms and DefinitionsDocument7 pagesBasic Electronics Terms and Definitionspondu888No ratings yet
- Basic Electrical Engineering - Leacture NotesDocument29 pagesBasic Electrical Engineering - Leacture NotesEngineer Zeeshan RasheedNo ratings yet
- Electrical Elements of Lift Technology Ed 3Document51 pagesElectrical Elements of Lift Technology Ed 3Fiorella Amer CarrNo ratings yet
- CB Lab Manual Cicrcuit LawsDocument13 pagesCB Lab Manual Cicrcuit LawsLin RongrongNo ratings yet
- Hypersensitivity ReactionDocument11 pagesHypersensitivity Reactionglorynjoku20No ratings yet
- VaccinationDocument25 pagesVaccinationglorynjoku20No ratings yet
- Femoral and Obturator NerveDocument41 pagesFemoral and Obturator Nerveglorynjoku20No ratings yet
- Rectum and Anal CanalDocument31 pagesRectum and Anal Canalglorynjoku20No ratings yet
- HaemoglobinopathiesDocument45 pagesHaemoglobinopathiesglorynjoku20No ratings yet
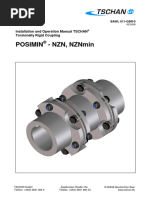
- Instrukcja Tschan Posimin NZN NZN MinDocument17 pagesInstrukcja Tschan Posimin NZN NZN MinAkshay SetlurNo ratings yet
- Understanding Caking Phenomena in Industrial Fertilizers: A ReviewDocument14 pagesUnderstanding Caking Phenomena in Industrial Fertilizers: A ReviewAlexandros GiannikosNo ratings yet
- E5174 RbeDocument4 pagesE5174 RbeVinod YbNo ratings yet
- Corey E.G., Chelg X. The Logic of Chemical Synthesis (Wiley, SDocument462 pagesCorey E.G., Chelg X. The Logic of Chemical Synthesis (Wiley, SHarrison VanKoten100% (1)
- CH 14 Hull OFOD9 TH EditionDocument31 pagesCH 14 Hull OFOD9 TH Editionseanwu95No ratings yet
- 5054 s18 QP 11 PDFDocument20 pages5054 s18 QP 11 PDFBreezy BrownNo ratings yet
- Food Safety SeminarDocument60 pagesFood Safety SeminarYuli ResmayantiNo ratings yet
- Math Worksheet Grade 1 RevisiDocument3 pagesMath Worksheet Grade 1 Revisianisasimamora19No ratings yet
- Integer SolutionDocument2 pagesInteger SolutionDrkhan JdpNo ratings yet
- Budget of Work in Mathematics 9Document3 pagesBudget of Work in Mathematics 9reysheila.boholNo ratings yet
- CH3 - Stiffness Method - Beams FramesDocument58 pagesCH3 - Stiffness Method - Beams Frames2499361939wNo ratings yet
- What Is Voltage Stabilizer & How It Works? Types of StabilizersDocument15 pagesWhat Is Voltage Stabilizer & How It Works? Types of StabilizersCHakornNo ratings yet
- Defects in TMT Bars, Possible Causes and Potential Solutions.Document14 pagesDefects in TMT Bars, Possible Causes and Potential Solutions.Prashant Goswami100% (1)
- Untitled ScenarioDocument6 pagesUntitled ScenarioOmer JavidNo ratings yet
- Manual Honeywell 3200Document101 pagesManual Honeywell 3200transfat transnovagNo ratings yet
- OH WWWDocument46 pagesOH WWWEduardCraciunNo ratings yet
- 4_5866132153250614247Document5 pages4_5866132153250614247aabaky35No ratings yet
- CE 16 Timber Midterm 2020Document3 pagesCE 16 Timber Midterm 2020Angelo VilleroNo ratings yet
- Grade 10: Physics Chapter 2: SoundDocument3 pagesGrade 10: Physics Chapter 2: SoundKashif AliiiNo ratings yet
- CO2 Type Fire Extinguisher Technical Data SheetDocument2 pagesCO2 Type Fire Extinguisher Technical Data SheetSonu KrishnaNo ratings yet
- Lubrication System: Service DataDocument11 pagesLubrication System: Service DataEko SunaryoNo ratings yet
- Ground-Fault Monitoring - The Concept - BenderDocument6 pagesGround-Fault Monitoring - The Concept - BenderSathish KumarNo ratings yet
- Python Question BankDocument2 pagesPython Question BankShreyas Adki100% (1)
- Make and Program Your Own Robots For The Commodore 64 and VIC 20Document50 pagesMake and Program Your Own Robots For The Commodore 64 and VIC 20turboc201No ratings yet
- DLL - Mathematics 5 Q1 W8Document9 pagesDLL - Mathematics 5 Q1 W8Yvonne Sujede FloritaNo ratings yet
- Computer ICT AwarenessDocument340 pagesComputer ICT Awarenessjoginder kumarNo ratings yet
- Huawei RRU RRU3268 Installation Guide PDFDocument131 pagesHuawei RRU RRU3268 Installation Guide PDFgazouliNo ratings yet
- Learning A Structured Latent Space For Unsupervised Point Cloud CompletionDocument11 pagesLearning A Structured Latent Space For Unsupervised Point Cloud CompletionTimemachine611 “Timemachine611”No ratings yet