DC Shunt Motors (1) - 1
DC Shunt Motors (1) - 1
Download as pdf or txt
You might also like
- PPT Iot Based Smart Irrigration SystemDocument14 pagesPPT Iot Based Smart Irrigration Systemaqillahnurul89No ratings yet
- EES612 Lab1Document25 pagesEES612 Lab1Levan LomidzeNo ratings yet
- Exp. 3 - Load Test and Equivalent Circuit Determination On Three Phase Squirrel Cage Induction Motor andDocument9 pagesExp. 3 - Load Test and Equivalent Circuit Determination On Three Phase Squirrel Cage Induction Motor andSanjay MeenaNo ratings yet
- Experiment No 5 The DC Series MotorDocument6 pagesExperiment No 5 The DC Series MotorMadel Roque67% (3)
- Manual InstalacionDocument18 pagesManual Instalacionmguardia892No ratings yet
- DC Shunt MotorDocument9 pagesDC Shunt MotorPeterNo ratings yet
- DC Shunt Motor Speed ControlDocument7 pagesDC Shunt Motor Speed Controleric wahomeNo ratings yet
- Ac Servo Speed Torque Characteristics Measurement Unit - PREMIERDocument14 pagesAc Servo Speed Torque Characteristics Measurement Unit - PREMIERAAYUSH KUMARNo ratings yet
- DC Shunt MotorDocument9 pagesDC Shunt MotorPeterNo ratings yet
- Induction MatlabDocument12 pagesInduction Matlabgrido002No ratings yet
- Starting, Speed Control....Document6 pagesStarting, Speed Control....dickmjoloNo ratings yet
- Control Material Module IIDocument15 pagesControl Material Module IIAbiodun MustaphaNo ratings yet
- Ac Servo MotorDocument14 pagesAc Servo MotorJeyanthNo ratings yet
- Exp 7Document11 pagesExp 7John Renzel RiveraNo ratings yet
- Blocked Rotor TestDocument11 pagesBlocked Rotor TestIjabi100% (1)
- Lab # 7 - DC Machines Part 3 Separately Excited DC GeneratorDocument6 pagesLab # 7 - DC Machines Part 3 Separately Excited DC GeneratorAdeel SyedNo ratings yet
- De La Salle University Dasmarinas: Experiment No. 4 DC Shunt MotorDocument6 pagesDe La Salle University Dasmarinas: Experiment No. 4 DC Shunt MotorMizhar GerardoNo ratings yet
- DC Motors Speed Control - ModDocument9 pagesDC Motors Speed Control - ModAnuja VargheseNo ratings yet
- Electrical and Electronics Lab Manual For Mechanical EngineeringDocument21 pagesElectrical and Electronics Lab Manual For Mechanical EngineeringSreerag Kunnathu SugathanNo ratings yet
- BME634-Lab1 Separately Excited DC MotorDocument24 pagesBME634-Lab1 Separately Excited DC Motorc24bhrkk6pNo ratings yet
- DC Motors: 2.0 ObjectivesDocument16 pagesDC Motors: 2.0 ObjectivesBelayet RonyNo ratings yet
- Experiment 2Document4 pagesExperiment 2dhruvmistry300No ratings yet
- Jabalpur Engineering College, Jabalpur Electrical Engineering Department AC/DC Drives Lab. List of ExperimentDocument63 pagesJabalpur Engineering College, Jabalpur Electrical Engineering Department AC/DC Drives Lab. List of ExperimentSajalNo ratings yet
- Total 363 Lab ManualDocument67 pagesTotal 363 Lab ManualBisal Sarker JoyNo ratings yet
- Experiment 2 - Iduction Motor Drive Using Slip Power RecoveryDocument6 pagesExperiment 2 - Iduction Motor Drive Using Slip Power RecoveryDeepak BansalNo ratings yet
- Experiment N0 - 2Document4 pagesExperiment N0 - 2Hapijul SanfuiNo ratings yet
- Ec221 Lab04 PDFDocument5 pagesEc221 Lab04 PDFishara karunarathnaNo ratings yet
- An-Najah National University Faculty of Engineering Electrical Engineering DepartmentDocument7 pagesAn-Najah National University Faculty of Engineering Electrical Engineering DepartmentMohammad SamaraNo ratings yet
- Experiment No: 1: Aim: Apparatus RequiredDocument29 pagesExperiment No: 1: Aim: Apparatus RequiredKarthi RamachandranNo ratings yet
- Three-Phase Induction MotorDocument10 pagesThree-Phase Induction MotorMadarwi SarwaNo ratings yet
- LAB04 (1)Document7 pagesLAB04 (1)DELOS SANTOS, JAN JIMUELNo ratings yet
- Retardation TestDocument5 pagesRetardation TestAnkit Shetty100% (1)
- Control System Lab EE-324-FDocument45 pagesControl System Lab EE-324-FDheeraj KumarNo ratings yet
- Matlab/Simulink Models For Typical Soft Starting Means For A DC MotorDocument6 pagesMatlab/Simulink Models For Typical Soft Starting Means For A DC MotorkensesanNo ratings yet
- AC Drive Theory and Application: Benefits of Using AC DrivesDocument8 pagesAC Drive Theory and Application: Benefits of Using AC DrivesRaghu KodiNo ratings yet
- Induction Motor Analysis For Start-Up ProtectionDocument11 pagesInduction Motor Analysis For Start-Up ProtectionPhilani XabaNo ratings yet
- Induction Motor Analysis For Start-Up ProtectionDocument11 pagesInduction Motor Analysis For Start-Up ProtectionAnonymous 1AAjd0No ratings yet
- EEE363 (Exp 9) Study of The Torque Speed Relationship of Wound Rotor Induction Motor With Variable ResistanceDocument7 pagesEEE363 (Exp 9) Study of The Torque Speed Relationship of Wound Rotor Induction Motor With Variable Resistancesalad.ass420420No ratings yet
- ED Lab Manual Original - Exp 1 To Exp 5Document19 pagesED Lab Manual Original - Exp 1 To Exp 5Umang MewaraNo ratings yet
- Massachusetts Institute of TechnologyDocument12 pagesMassachusetts Institute of TechnologyPrakhar PandeyNo ratings yet
- No Load and Block Rotor Test 3 PH Ind Motor DolDocument14 pagesNo Load and Block Rotor Test 3 PH Ind Motor DolalexNo ratings yet
- Exp. 2 - OCC and Load Test On AlternatorDocument7 pagesExp. 2 - OCC and Load Test On AlternatorKailash Jagarwal100% (1)
- Three-Phase Induction MotorDocument21 pagesThree-Phase Induction MotorGovel EzraNo ratings yet
- Experiment No.2: Operation of D.C Motors, Running and ReversingDocument10 pagesExperiment No.2: Operation of D.C Motors, Running and Reversingwrya hussainNo ratings yet
- Experiment 5Document8 pagesExperiment 5rastgonikoNo ratings yet
- DC GeneratorDocument12 pagesDC GeneratorPeterNo ratings yet
- Power Electronics Application in DC Motor Drives - Case Study - ss03595 - Sarwan Shah PDFDocument6 pagesPower Electronics Application in DC Motor Drives - Case Study - ss03595 - Sarwan Shah PDFMehdi Raza KhorasaniNo ratings yet
- DC Machine - 8Document18 pagesDC Machine - 8Mohammed AliNo ratings yet
- DC 2 Characterstics of DC MCDocument13 pagesDC 2 Characterstics of DC MCsunil bangarNo ratings yet
- EE6365 EE Lab ManualDocument58 pagesEE6365 EE Lab Manualjk100% (1)
- No Load and Block Rotor Test: Premier Trading CorporationDocument11 pagesNo Load and Block Rotor Test: Premier Trading CorporationKsr Akhil100% (1)
- 9 Speed Control of DC Shunt MotorDocument4 pages9 Speed Control of DC Shunt MotormanishNo ratings yet
- Experiment 04Document7 pagesExperiment 04Zeynal Abidin ŞabaşNo ratings yet
- Starting Methods of A DC MotorDocument8 pagesStarting Methods of A DC Motoragreykato100% (1)
- Lab Report: Engineering Analysis and Design (EEN 206)Document6 pagesLab Report: Engineering Analysis and Design (EEN 206)sakshammahajan24303No ratings yet
- Some Power Electronics Case Studies Using Matlab Simpowersystem BlocksetFrom EverandSome Power Electronics Case Studies Using Matlab Simpowersystem BlocksetNo ratings yet
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetNo ratings yet
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetRating: 2 out of 5 stars2/5 (1)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- Ultrasonic MotorsDocument17 pagesUltrasonic MotorsOm PuriNo ratings yet
- Electric Heater Company Operating and Maintenance Manual For Immersion Heating ElementsDocument8 pagesElectric Heater Company Operating and Maintenance Manual For Immersion Heating Elementsnavi_0403No ratings yet
- Unit3 AssignmentDocument2 pagesUnit3 Assignmentsaiteja1234No ratings yet
- STP 10 NK 70 ZFPDocument13 pagesSTP 10 NK 70 ZFPOsama Bin AtaNo ratings yet
- SECTION 26 3213 Engine Generators Part 1 General 1.01 Section IncludesDocument31 pagesSECTION 26 3213 Engine Generators Part 1 General 1.01 Section IncludesMarcos FernandezNo ratings yet
- Amadeus PMX15 MKII TDS V1.2Document4 pagesAmadeus PMX15 MKII TDS V1.2Jose Gregorio Ortega CarrilloNo ratings yet
- Measurements Pots ReportDocument6 pagesMeasurements Pots ReportFaustin MailuNo ratings yet
- ADU4518R8: Antenna SpecificationsDocument2 pagesADU4518R8: Antenna SpecificationsRaluca Roxana SzaszNo ratings yet
- L11 Pipelined Datapath andDocument31 pagesL11 Pipelined Datapath andVidhi Kishor100% (1)
- 2013 CCTV CatalogDocument295 pages2013 CCTV CatalogEPCOMUSANo ratings yet
- OSCAR - E - V6 Oscar MP3 Player User ManualDocument22 pagesOSCAR - E - V6 Oscar MP3 Player User ManualGurkan120% (1)
- Detail A: P1 P2 0.25 0.10 TYP 1.0 0.10 TYPDocument1 pageDetail A: P1 P2 0.25 0.10 TYP 1.0 0.10 TYPkcirrenwodNo ratings yet
- Pt200Mb Advanced Weighing IndicatorDocument2 pagesPt200Mb Advanced Weighing IndicatorMargaAstaJayaMulyaNo ratings yet
- Emergency Stop Relays, Safety Gate Monitors: Pnoz X1Document3 pagesEmergency Stop Relays, Safety Gate Monitors: Pnoz X1Denny SchizophrenicNo ratings yet
- Tracer An Manual en V2.6Document40 pagesTracer An Manual en V2.6Joslugar AhoraNo ratings yet
- VIPEDIA 12 NET DatasheetDocument7 pagesVIPEDIA 12 NET DatasheetKanasai 89No ratings yet
- Hyundai D6GA Fuel SystemDocument53 pagesHyundai D6GA Fuel SystemBigfair HD78100% (11)
- Automatic Sequencing of Multiple Generator-Sets GenconDocument4 pagesAutomatic Sequencing of Multiple Generator-Sets GenconnachoNo ratings yet
- Atomic SpectrosDocument28 pagesAtomic SpectrosJorge Rios RNo ratings yet
- La B843PDocument102 pagesLa B843PAgus ApriyantoNo ratings yet
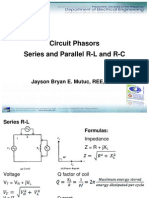
- Circuit Phasors R-LDocument7 pagesCircuit Phasors R-LEllamicha SoqNo ratings yet
- TEMS Automatic - Script Design GuideDocument18 pagesTEMS Automatic - Script Design GuideCyrille NkNo ratings yet
- Suspension Active TPDocument210 pagesSuspension Active TPmajdoubNo ratings yet
- Bias Power Supply For TV and Monitor TFT LCD Panels: FeaturesDocument35 pagesBias Power Supply For TV and Monitor TFT LCD Panels: Featureseduinggv1829No ratings yet
- Tehnički Opis WICAL 210Document8 pagesTehnički Opis WICAL 210mikcomiNo ratings yet
- User Manual CKP-CMP Simulator Model Venom 4Document14 pagesUser Manual CKP-CMP Simulator Model Venom 4niarsace100% (1)
- Datasheet - HK hsmp-3824-tr1g 7461250Document10 pagesDatasheet - HK hsmp-3824-tr1g 7461250Top Techno Lab CompanyNo ratings yet
- Cable TSP Spec Sheet 02242020Document2 pagesCable TSP Spec Sheet 02242020Hamza JavaidNo ratings yet