TDA in NLP
TDA in NLP
Download as pdf or txt
You might also like
- Ecdis ManualDocument223 pagesEcdis ManualVinko Radović67% (3)
- STFC - Mantis InformationDocument8 pagesSTFC - Mantis InformationJason MillerNo ratings yet
- Topological SpaceDocument7 pagesTopological SpaceAlberto Conde MorenoNo ratings yet
- Topology A Chapter For The Mathematics++ Lecture Notes: Ji R I Matou Sek Rev. 2/XII/2014 JMDocument68 pagesTopology A Chapter For The Mathematics++ Lecture Notes: Ji R I Matou Sek Rev. 2/XII/2014 JMANDRES DAVID GUEVARA MENDOZANo ratings yet
- Notes For Reu by J.P. MayDocument15 pagesNotes For Reu by J.P. MayboNo ratings yet
- Notes For Reu by J.P. MayDocument13 pagesNotes For Reu by J.P. MayEpic WinNo ratings yet
- General Topology T. Tom Dieck 2011 PDFDocument85 pagesGeneral Topology T. Tom Dieck 2011 PDFEduar DoNo ratings yet
- topologyDocument9 pagestopologyekrrmerderNo ratings yet
- Topological SpaceDocument8 pagesTopological SpacePankaj Negi100% (2)
- 2.1 TopologyDocument12 pages2.1 TopologymukulNo ratings yet
- John B. EtnyreDocument12 pagesJohn B. EtnyreAlexander CanalesNo ratings yet
- Math 404 Lecture NotesDocument31 pagesMath 404 Lecture NotesOmegaUserNo ratings yet
- Open and Closed Sets in TopologyDocument2 pagesOpen and Closed Sets in Topologychenardanar89No ratings yet
- TopologyDocument32 pagesTopologyabhishekverma460.avNo ratings yet
- An Overview of The Potential of Citrus Hystrix (Kaffir Lime) Essential Oil As Mosquito RepellentDocument6 pagesAn Overview of The Potential of Citrus Hystrix (Kaffir Lime) Essential Oil As Mosquito RepellentInternational Journal of Advances in Applied Sciences (IJAAS)No ratings yet
- Where We Go From HereDocument6 pagesWhere We Go From HereWei Shan NgNo ratings yet
- Rövid Bevezetés A Modális Logika Topológiai SzemantikájábaDocument14 pagesRövid Bevezetés A Modális Logika Topológiai SzemantikájábaFarkas GyörgyNo ratings yet
- Lattices and Topology Lectura 4Document179 pagesLattices and Topology Lectura 4EmisNo ratings yet
- Lec 01Document7 pagesLec 01matbaila247No ratings yet
- Topology ConceptsDocument12 pagesTopology ConceptsNagewoNo ratings yet
- Ilovepdf MergedDocument184 pagesIlovepdf MergedDevang BajpaiNo ratings yet
- Topology Examples NotebookDocument10 pagesTopology Examples NotebookKayleeNo ratings yet
- 1 Motivation and Foreshadowing: C 2018 - Ivan KhatchatourianDocument6 pages1 Motivation and Foreshadowing: C 2018 - Ivan KhatchatourianDouglasNo ratings yet
- Topos - WikipediaDocument52 pagesTopos - WikipediaOzhenNo ratings yet
- TopologiaDocument67 pagesTopologiaLuis MatuteNo ratings yet
- Summary 1Document20 pagesSummary 1Javed AnsariNo ratings yet
- Introduction To TopologyDocument8 pagesIntroduction To Topologymonsterorwot7No ratings yet
- Essential Topology Chapter 3Document7 pagesEssential Topology Chapter 3GoranHuyghNo ratings yet
- The Fundamental Group (To Be Discussed Later)Document2 pagesThe Fundamental Group (To Be Discussed Later)George TurcasNo ratings yet
- Dugowson On Connectivity Spaces Hal 201001Document31 pagesDugowson On Connectivity Spaces Hal 201001Félix Boggio Éwanjé-ÉpéeNo ratings yet
- RMJ 1975 5 1 1Document60 pagesRMJ 1975 5 1 1khairia miraNo ratings yet
- MergedDocument66 pagesMergedSoumyajoy DasNo ratings yet
- blank1Document3 pagesblank1carljaymuelcayubitNo ratings yet
- Urbanik - A Brief Introduction To Schemes and SheavesDocument16 pagesUrbanik - A Brief Introduction To Schemes and SheavesVladimir EgorovNo ratings yet
- SISSA Groups Course2017Document99 pagesSISSA Groups Course2017benhaddouchezakariaNo ratings yet
- Assignment-2020 M.Sc. Mathematics (Eve) IV-Semester: PMAS Arid Agriculture University, RawalpindiDocument30 pagesAssignment-2020 M.Sc. Mathematics (Eve) IV-Semester: PMAS Arid Agriculture University, RawalpindiHamza ShafiqNo ratings yet
- Evans L.,Thompson R. Introduction To Algebraic Topology PDFDocument248 pagesEvans L.,Thompson R. Introduction To Algebraic Topology PDFmonteNo ratings yet
- Point - Set Topology: Benjie A. VillafloresDocument17 pagesPoint - Set Topology: Benjie A. VillafloresGlenn Michael PascuaNo ratings yet
- Topology Course Lecture NotesDocument49 pagesTopology Course Lecture NotesAlex LeeNo ratings yet
- The Low Separation Axioms (T) and (T)Document6 pagesThe Low Separation Axioms (T) and (T)ayu7kajiNo ratings yet
- Topological Vector SpacesDocument58 pagesTopological Vector SpacesMilana SavicNo ratings yet
- Mathematical Association of America, Taylor & Francis, Ltd. The American Mathematical MonthlyDocument5 pagesMathematical Association of America, Taylor & Francis, Ltd. The American Mathematical MonthlySong LiNo ratings yet
- Definition and Theorems of Basic TopologyDocument13 pagesDefinition and Theorems of Basic TopologySubrata PaulNo ratings yet
- Topological Spaces: SpaceDocument9 pagesTopological Spaces: SpaceJuwandaNo ratings yet
- Topological Mathematical PapersDocument3 pagesTopological Mathematical PapersDefinitely JunkieNo ratings yet
- UntitledDocument15 pagesUntitledSatbir SinghNo ratings yet
- TopologyDocument110 pagesTopologyprofessorsmaths7No ratings yet
- Topology 464Document76 pagesTopology 464Zhang Xue PengNo ratings yet
- Golub G.H., Van Loan C.F. - Matrix ComputationsDocument19 pagesGolub G.H., Van Loan C.F. - Matrix ComputationsFranco Golfieri MadriagaNo ratings yet
- Notes On Topology: Alex Nelson May 31, 2009Document17 pagesNotes On Topology: Alex Nelson May 31, 2009Najaf AliNo ratings yet
- Sem LehnerDocument15 pagesSem LehnerAgustín ContrerasNo ratings yet
- An Intutive Introduction To TopologyDocument5 pagesAn Intutive Introduction To TopologyShashank SharmaNo ratings yet
- (Evans L., Thompson R.) Introduction To AlgebraicDocument248 pages(Evans L., Thompson R.) Introduction To AlgebraicJean Carlos100% (1)
- J.-P. Serre, Algebraic Geometry and Analytic GeometryDocument30 pagesJ.-P. Serre, Algebraic Geometry and Analytic GeometryJujian ZhangNo ratings yet
- Articulo de ArhangelDocument13 pagesArticulo de ArhangelisoberanogonzalezNo ratings yet
- Math 872 Algebraic TopologyDocument18 pagesMath 872 Algebraic TopologyMutt3012No ratings yet
- Topology Course Lecture Notes - A. McCluskey B. McMasterDocument51 pagesTopology Course Lecture Notes - A. McCluskey B. McMastermwa78692100% (1)
- Point Set Topology From MathCamp 2011Document17 pagesPoint Set Topology From MathCamp 2011Tommy TangNo ratings yet
- Geometry, Topology and PhysicsDocument35 pagesGeometry, Topology and Physicscosmodot60100% (1)
- Cover Letter For Warner BrosDocument5 pagesCover Letter For Warner Brosf1vijokeheg3100% (2)
- Sika Boom: Expanding Polyurethane FoamDocument3 pagesSika Boom: Expanding Polyurethane FoamBalasubramanian MahadevanNo ratings yet
- File 10 CMR Convention IruDocument31 pagesFile 10 CMR Convention IruZoran DimitrijevicNo ratings yet
- Magtrol: Customized Test System For ABS MotorsDocument1 pageMagtrol: Customized Test System For ABS MotorsGilbert MendozaNo ratings yet
- Primary - Sekolah Cikal Surabaya - Enrollment Guide 2024-2025 3Document15 pagesPrimary - Sekolah Cikal Surabaya - Enrollment Guide 2024-2025 3Naura Athiyyah SativaNo ratings yet
- Katalog KompilacijaDocument15 pagesKatalog KompilacijaZivan SekulicNo ratings yet
- Jioint Declaration FormDocument1 pageJioint Declaration FormRohit GuptaNo ratings yet
- Coach Record v2024Document1 pageCoach Record v2024marcsil DalumpinesNo ratings yet
- General Description Product Summary: 30V N-Channel MOSFETDocument6 pagesGeneral Description Product Summary: 30V N-Channel MOSFETSomendra SinghNo ratings yet
- Em 45 ManualDocument4 pagesEm 45 ManualHamidNo ratings yet
- SPC. 00-ZA-E-09101: Incidental Scenario IdentificationDocument22 pagesSPC. 00-ZA-E-09101: Incidental Scenario IdentificationMauro MLR100% (1)
- Makalah Tefl IIDocument10 pagesMakalah Tefl IINa Na ChriesnaNo ratings yet
- 7th Sem Abhijit - Suvam - Project - ReportDocument31 pages7th Sem Abhijit - Suvam - Project - ReportAbhijit NathNo ratings yet
- Snapdrill Catalog 2022Document4 pagesSnapdrill Catalog 2022Milosevici EkipaNo ratings yet
- Hard Evidence of Corporate Takeover at All Levels of Government in AmericaDocument4 pagesHard Evidence of Corporate Takeover at All Levels of Government in AmericaMichaelMationschek100% (2)
- Pandi Gas Application FormDocument3 pagesPandi Gas Application FormastutesdonnyNo ratings yet
- Astroarcheology at The Borobodur TempleDocument12 pagesAstroarcheology at The Borobodur TempleUday DokrasNo ratings yet
- T Data VerificationDocument2 pagesT Data VerificationAnuroop GNo ratings yet
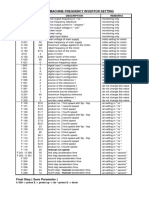
- Inverter Setting For 55kw SIEI Inanam Spinning MachineDocument1 pageInverter Setting For 55kw SIEI Inanam Spinning Machinenoblas melNo ratings yet
- Soal UTS GBK 2017 B. Inggris Kelas XII SMK It Baitun Nur PunggurDocument6 pagesSoal UTS GBK 2017 B. Inggris Kelas XII SMK It Baitun Nur Punggurtoya bikers100% (1)
- Ce123b FinalReport 1Document63 pagesCe123b FinalReport 1hidaiNo ratings yet
- Cell File Srs FinalDocument105 pagesCell File Srs FinalfraitelNo ratings yet
- 3.chemical Reactions and Reaction StoichiometryDocument5 pages3.chemical Reactions and Reaction StoichiometryJey Vee SalcedoNo ratings yet
- Logistimolease AgreementDocument5 pagesLogistimolease AgreementYogesh KulkarniNo ratings yet
- MBA I - 428 Business Ethics Unit - Iv: Corporate Governance MeaningDocument6 pagesMBA I - 428 Business Ethics Unit - Iv: Corporate Governance MeaningJebin JamesNo ratings yet
- Fundamentals of Table TennisDocument11 pagesFundamentals of Table TennisIB CamanoNo ratings yet
- Call For StudentDocument166 pagesCall For StudentBoris DossaNo ratings yet
- Coca-Cola Continues Unethical and Dishonest Practices in IndiaDocument20 pagesCoca-Cola Continues Unethical and Dishonest Practices in IndiaÅyìshą RəəmNo ratings yet