0% found this document useful (0 votes)
3 viewscode
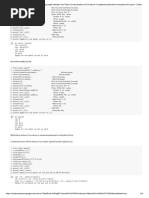
The document outlines a MATLAB simulation for analyzing the performance of a piston system, including parameters such as discharge and suction pressures, bulk modulus, and angular speed. It utilizes an ODE solver to compute pressure, torque, and angular acceleration over a specified range of angles, producing plots for each variable. The ODE function defines the dynamics of the system based on various constants and conditions related to the piston's operation.
Uploaded by
peace makerCopyright
© © All Rights Reserved
Available Formats
Download as DOCX, PDF, TXT or read online on Scribd
0% found this document useful (0 votes)
3 viewscode
The document outlines a MATLAB simulation for analyzing the performance of a piston system, including parameters such as discharge and suction pressures, bulk modulus, and angular speed. It utilizes an ODE solver to compute pressure, torque, and angular acceleration over a specified range of angles, producing plots for each variable. The ODE function defines the dynamics of the system based on various constants and conditions related to the piston's operation.
Uploaded by
peace makerCopyright
© © All Rights Reserved
Available Formats
Download as DOCX, PDF, TXT or read online on Scribd
/ 5