0% found this document useful (0 votes)
414 viewsServo Application Lecture Notes
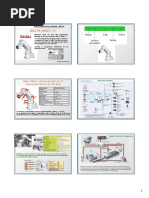
The document discusses robot motion and control systems. It covers topics like forward and inverse kinematics, PID control, frame-based motions, modeling motion effects, automatic control systems, transducers, open loop controllers, closed loop controllers, PID control, target tracking, motion control systems, and servo systems.
Uploaded by
maduu bongsCopyright
© © All Rights Reserved
Available Formats
Download as PPT, PDF, TXT or read online on Scribd
0% found this document useful (0 votes)
414 viewsServo Application Lecture Notes
The document discusses robot motion and control systems. It covers topics like forward and inverse kinematics, PID control, frame-based motions, modeling motion effects, automatic control systems, transducers, open loop controllers, closed loop controllers, PID control, target tracking, motion control systems, and servo systems.
Uploaded by
maduu bongsCopyright
© © All Rights Reserved
Available Formats
Download as PPT, PDF, TXT or read online on Scribd
/ 101