CH 7.9: Nonhomogeneous Linear Systems: The General Theory of A Nonhomogeneous System of Equations
CH 7.9: Nonhomogeneous Linear Systems: The General Theory of A Nonhomogeneous System of Equations
Download as ppt, pdf, or txt
You might also like
- Boyce W.E., DiPrima R.C. Elementary Differential Equations and Boundary Value Problems 2009-Pages-454-464Document11 pagesBoyce W.E., DiPrima R.C. Elementary Differential Equations and Boundary Value Problems 2009-Pages-454-464Nurul Rafiqah Nasution100% (1)
- Casing Design PDFDocument20 pagesCasing Design PDFHoan Hoan100% (2)
- M30-2 Unit 7 ABDocument14 pagesM30-2 Unit 7 ABdhyeyNo ratings yet
- CH 7.9: Nonhomogeneous Linear Systems: The General Theory of A Nonhomogeneous System of EquationsDocument21 pagesCH 7.9: Nonhomogeneous Linear Systems: The General Theory of A Nonhomogeneous System of EquationsVSRI1993No ratings yet
- Week-14 Lecture Notes 02 - 04 April 2024Document17 pagesWeek-14 Lecture Notes 02 - 04 April 2024sarahsmith85579793No ratings yet
- Second Order OdeDocument8 pagesSecond Order OdeFrancesnoel CarvajalNo ratings yet
- Module 3 Part 1Document4 pagesModule 3 Part 1Sumukh KiniNo ratings yet
- Chapter 2. Linear Systems: Lecture Notes For MA2327Document50 pagesChapter 2. Linear Systems: Lecture Notes For MA2327Santiago Garrido BullónNo ratings yet
- Lesson1 3 PDFDocument7 pagesLesson1 3 PDFHugo NavaNo ratings yet
- M204 Syst IIDocument8 pagesM204 Syst IIHarvey SpecterNo ratings yet
- Exercises For Signals and Systems (Part Two)Document4 pagesExercises For Signals and Systems (Part Two)Vincent YuchiNo ratings yet
- WEEK1 RevisionDocument21 pagesWEEK1 RevisionMOHD ENDRA SHAFIQNo ratings yet
- DSP FINALDocument7 pagesDSP FINALJeraldBrix A. MadridNo ratings yet
- 24.3.6 - Variation of Parameters Second OrderDocument11 pages24.3.6 - Variation of Parameters Second Orderanon_422073337No ratings yet
- Cauchy-Euler Equation:: Dy D Y Dy Ax Ax Ax Ayq DX DX DX Aa Aa Xe DT X E T X DX X Xe T X D D DX D DT XDDocument9 pagesCauchy-Euler Equation:: Dy D Y Dy Ax Ax Ax Ayq DX DX DX Aa Aa Xe DT X E T X DX X Xe T X D D DX D DT XDSanjar AbbasiNo ratings yet
- Ordinary Differential Equations - Solution ManualDocument176 pagesOrdinary Differential Equations - Solution Manualrlewis120% (1)
- Ae2235 Exercises Topic I.5Document5 pagesAe2235 Exercises Topic I.5che cheNo ratings yet
- Exam 3 SolDocument12 pagesExam 3 Solagha abdullahNo ratings yet
- Signals & Systems B38SA 2018: Chapter 2 Assignment Question 1 - Theory - 10 MarksDocument6 pagesSignals & Systems B38SA 2018: Chapter 2 Assignment Question 1 - Theory - 10 MarksBokai ZhouNo ratings yet
- ECEN 314: Signals and Systems: 1 CausalityDocument4 pagesECEN 314: Signals and Systems: 1 CausalityMEIVELJ 19EE025No ratings yet
- ECEN 314: Signals and Systems: 1 CausalityDocument4 pagesECEN 314: Signals and Systems: 1 CausalityMafer ValdezNo ratings yet
- Ae2235 Exercises Lecture 5Document5 pagesAe2235 Exercises Lecture 5Sarieta SarrahNo ratings yet
- Lecture 23Document13 pagesLecture 23marquisarmwoodNo ratings yet
- Topik6 MA2271 - SPDLDocument45 pagesTopik6 MA2271 - SPDLFauzia SavitriNo ratings yet
- The Inhomogenous ProblemDocument3 pagesThe Inhomogenous ProblemMike HigginsNo ratings yet
- Second Class: Linear Equations Method of Integrating FactorsDocument15 pagesSecond Class: Linear Equations Method of Integrating FactorsPFENo ratings yet
- Systems of Linear Equations: 1 Matrix FunctionsDocument12 pagesSystems of Linear Equations: 1 Matrix FunctionsSeow Khaiwen KhaiwenNo ratings yet
- 185week3 1Document16 pages185week3 1Sofia MansillaNo ratings yet
- Materi (PD Orde 1 Dan FI) PDFDocument18 pagesMateri (PD Orde 1 Dan FI) PDFFadilyahyaNo ratings yet
- Ese562 Lect01Document35 pagesEse562 Lect01ashralph7No ratings yet
- Control 11 4 PDFDocument16 pagesControl 11 4 PDFMais SarayraNo ratings yet
- Added Slides For Chapter2Document24 pagesAdded Slides For Chapter2Minh Huệ TôNo ratings yet
- ELEG 3124 Assignment # 1Document16 pagesELEG 3124 Assignment # 1Nguyễn Văn ĐứcNo ratings yet
- Practice Problems Chapter 6 and 7 I. Laplace Transform: F T T U TDocument6 pagesPractice Problems Chapter 6 and 7 I. Laplace Transform: F T T U TMahmoud I. MahmoudNo ratings yet
- Exercises CTDTDocument7 pagesExercises CTDTVenkatraman GopalakrishnanNo ratings yet
- MATH219 Lecture 2Document7 pagesMATH219 Lecture 2wpaul2860No ratings yet
- Linear System Theory: Dr. Vali UddinDocument27 pagesLinear System Theory: Dr. Vali UddinMuhammad HassanNo ratings yet
- Computational Fluid Dynamics : February 28Document68 pagesComputational Fluid Dynamics : February 28Tatenda NyabadzaNo ratings yet
- HW1 SolutionDocument3 pagesHW1 SolutionZim ShahNo ratings yet
- T T D T X X: The 1D Diffusion Problem IsDocument9 pagesT T D T X X: The 1D Diffusion Problem Isratchagar aNo ratings yet
- Stability Analysis of Periodically Switched Linear Systems Using Floquet TheoryDocument11 pagesStability Analysis of Periodically Switched Linear Systems Using Floquet TheoryTukesh SoniNo ratings yet
- Ls 5Document5 pagesLs 5jordan1412No ratings yet
- Sigsys 2019 Spring Midterm SolutionDocument6 pagesSigsys 2019 Spring Midterm Solution박천우No ratings yet
- 25.4.4 - The Method of Variation of Parameters Higher OrderDocument10 pages25.4.4 - The Method of Variation of Parameters Higher Orderanon_422073337No ratings yet
- 2019 Answers PDFDocument56 pages2019 Answers PDFNitya Pooja ReddyNo ratings yet
- Convolution IntegralDocument13 pagesConvolution Integralahmad mzNo ratings yet
- ExercisesDocument15 pagesExercisesDrRooba HasanNo ratings yet
- Boyce/Diprima 9 Ed, CH 2.1: Linear Equations Method of Integrating FactorsDocument15 pagesBoyce/Diprima 9 Ed, CH 2.1: Linear Equations Method of Integrating FactorsWinda DwiNo ratings yet
- On Free Mechanical VibrationsDocument41 pagesOn Free Mechanical VibrationsPuneet BahriNo ratings yet
- Homework Set #4: EE6412: Optimal Control January - May 2023Document5 pagesHomework Set #4: EE6412: Optimal Control January - May 2023kapali123No ratings yet
- N N N N Y: Signals & Systems Questions Set 01Document13 pagesN N N N Y: Signals & Systems Questions Set 01Sachin Singh NegiNo ratings yet
- Tutorial 4Document5 pagesTutorial 4Nornis DalinaNo ratings yet
- Correction 01-Ista - 21545476Document4 pagesCorrection 01-Ista - 21545476Kueteloic06No ratings yet
- SMA 2271 - Lec 7b PDFDocument9 pagesSMA 2271 - Lec 7b PDFStanley MwangiNo ratings yet
- HWsets-2011 2Document13 pagesHWsets-2011 2salimNo ratings yet
- Q1 Soln MoodleDocument2 pagesQ1 Soln MoodleSatyamSahuNo ratings yet
- EE472 - Control Theory II - Summer 2018 Homework #4 Due Date: 5 July 2018Document1 pageEE472 - Control Theory II - Summer 2018 Homework #4 Due Date: 5 July 2018Hussain SalmanNo ratings yet
- Set1-5 Ques + SolnDocument68 pagesSet1-5 Ques + SolnshubhamNo ratings yet
- Mid-Sem Exam SolutionsDocument4 pagesMid-Sem Exam SolutionskaranmehramalikNo ratings yet
- Solution Tutorial UmpDocument5 pagesSolution Tutorial UmpMuhammad Zulqarnain IskandarNo ratings yet
- ch03 2Document23 pagesch03 2phakphumNo ratings yet
- 1801-Article Text-5110-1-10-20191011Document6 pages1801-Article Text-5110-1-10-20191011RMolina65No ratings yet
- Estimating The Parameters of A Generalized Lambda Distribution - Benjamin Fournier - Jun 3 2016Document24 pagesEstimating The Parameters of A Generalized Lambda Distribution - Benjamin Fournier - Jun 3 2016RMolina65No ratings yet
- Modern Methods of Elimination of Lost Circulation in Directional WellsDocument10 pagesModern Methods of Elimination of Lost Circulation in Directional WellsRMolina65No ratings yet
- High-Precision Arithmetic in Mathematical Physics - David H. Bailey - 19 January 2015Document31 pagesHigh-Precision Arithmetic in Mathematical Physics - David H. Bailey - 19 January 2015RMolina65No ratings yet
- Advances in Iterative Methods For Nonlinear Equations - Sergio Amat & Sonia Busquier - 2016Document286 pagesAdvances in Iterative Methods For Nonlinear Equations - Sergio Amat & Sonia Busquier - 2016RMolina65No ratings yet
- Activation Functions: Sigmoid, Tanh, Relu, Leaky Relu, Prelu, Elu, Threshold Relu and Softmax Basics For Neural Networks and Deep LearningDocument15 pagesActivation Functions: Sigmoid, Tanh, Relu, Leaky Relu, Prelu, Elu, Threshold Relu and Softmax Basics For Neural Networks and Deep LearningRMolina65No ratings yet
- Monotonic Cubic Spline InterpolationDocument8 pagesMonotonic Cubic Spline InterpolationRMolina65No ratings yet
- Extrapolating Long-Maturity Bond Yields For Financial Risk Measurement - Jens H E Christensen - March 2019Document74 pagesExtrapolating Long-Maturity Bond Yields For Financial Risk Measurement - Jens H E Christensen - March 2019RMolina65No ratings yet
- Richardson Extrapolation With OhnDocument1 pageRichardson Extrapolation With OhnRMolina65No ratings yet
- Finite Difference Coefficient - WikipediaDocument5 pagesFinite Difference Coefficient - WikipediaRMolina65No ratings yet
- Can Be Used For Any Deep Well and For Any Values of Surface Formation TemperatureDocument7 pagesCan Be Used For Any Deep Well and For Any Values of Surface Formation TemperatureRMolina65No ratings yet
- Surface Interp ToolsDocument2 pagesSurface Interp ToolsRMolina65No ratings yet
- Nonhomogeneous Linear Systems: Undetermined CoefficientsDocument24 pagesNonhomogeneous Linear Systems: Undetermined CoefficientsRMolina65No ratings yet
- Soft Versus Stiff StringDocument10 pagesSoft Versus Stiff StringRMolina65100% (1)
- Gas Cut MudDocument53 pagesGas Cut MudRMolina65No ratings yet
- Reverse-Circulation Cementing and Foamed Latex Cement Enable Drilling in Lost - Circulation ZonesDocument5 pagesReverse-Circulation Cementing and Foamed Latex Cement Enable Drilling in Lost - Circulation ZonesRMolina65No ratings yet
- Influx Management Envelope Deployed During Planning Phase For 3 Sections of Deepwater MPD WellDocument4 pagesInflux Management Envelope Deployed During Planning Phase For 3 Sections of Deepwater MPD WellRMolina65No ratings yet
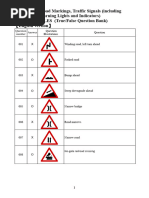
- 機車標誌是非題 英文1120918Document20 pages機車標誌是非題 英文1120918Natasha CarissaNo ratings yet
- RX 50 - RX 50 Factory E4Document8 pagesRX 50 - RX 50 Factory E4Lamar Van Den BornNo ratings yet
- Refined Model of Maslow's Needs Theory in Internet EraDocument11 pagesRefined Model of Maslow's Needs Theory in Internet Era2PA06Indira Salsabila JastinNo ratings yet
- Unit-15 Sales Forecasting and Sales Quotas PDFDocument8 pagesUnit-15 Sales Forecasting and Sales Quotas PDFbhar4tp100% (1)
- CQ Amateur Radio January 2021Document118 pagesCQ Amateur Radio January 2021SathawitNo ratings yet
- Cybernetic Paradigm of GrissingerDocument21 pagesCybernetic Paradigm of GrissingerSushant PatilNo ratings yet
- Cyber Cafe Application FormDocument4 pagesCyber Cafe Application Formkrul786100% (3)
- Gujarat Technological UniversityDocument1 pageGujarat Technological UniversityUdhyam AadharNo ratings yet
- Body Fluid 1Document55 pagesBody Fluid 1Anonymous z3afjyy1aNo ratings yet
- 2014 - 68 - EU Pressure Equipment - Summary List of Harmonised Standards - Generated On 10.02.2021Document17 pages2014 - 68 - EU Pressure Equipment - Summary List of Harmonised Standards - Generated On 10.02.2021Bilel MahjoubNo ratings yet
- Ductile Iron Pipe - WikipediaDocument18 pagesDuctile Iron Pipe - WikipediaZaw Moe AungNo ratings yet
- Design of Earthen DamDocument12 pagesDesign of Earthen DamSagar Jha0% (1)
- Performance-Based Assessment in The EFL ClassroomDocument8 pagesPerformance-Based Assessment in The EFL ClassroomYamith J. Fandiño100% (1)
- BHu Application FormDocument4 pagesBHu Application Formsapna jiNo ratings yet
- Twin Pines Balance SheetDocument1 pageTwin Pines Balance SheetSchaferNo ratings yet
- HVPD AssignmentDocument2 pagesHVPD Assignmentsugasini202No ratings yet
- Basic 8 Scheme of WorkDocument10 pagesBasic 8 Scheme of WorkAmatu AbukariNo ratings yet
- Business Plan: Naga View Adventist College, Inc. Zone 2, Panicuason Naga City, BicolDocument8 pagesBusiness Plan: Naga View Adventist College, Inc. Zone 2, Panicuason Naga City, BicolKier Jhoem Saludar MahusayNo ratings yet
- UL - Performance Materials Electronics - Brochure - DPS - ENDocument7 pagesUL - Performance Materials Electronics - Brochure - DPS - ENHenry ComasNo ratings yet
- Lakefield Campground Utilization StudyDocument77 pagesLakefield Campground Utilization StudyPeterborough ExaminerNo ratings yet
- The Life of Gustav KlimtDocument8 pagesThe Life of Gustav KlimtEmma VioNo ratings yet
- Anxiety Level 2Document14 pagesAnxiety Level 2Rose ann rodriguezNo ratings yet
- Cloud Computing With Aws Jan 2024Document1 pageCloud Computing With Aws Jan 2024somaharshith406No ratings yet
- Autocad 2008 3D TutorialDocument29 pagesAutocad 2008 3D TutorialMarisete de Azevedo92% (13)
- Visakhapatnam PDFDocument32 pagesVisakhapatnam PDFChethan ReddyNo ratings yet
- Buffering in Operating System - JavatpointDocument7 pagesBuffering in Operating System - JavatpointkkkkNo ratings yet
- Serverless Computing 2Document60 pagesServerless Computing 2Mayank JangidNo ratings yet
- Large It ListDocument864 pagesLarge It ListGp MishraNo ratings yet
- 22 - Gauss's LawDocument37 pages22 - Gauss's LawTF OlvinaNo ratings yet