NVIDIA Isaac Perceptor
NVIDIA Isaac™ Perceptor, built on Isaac ROS, is a reference workflow of NVIDIA-accelerated libraries and AI models that helps you quickly build robust autonomous mobile robots (AMRs). These robots are designed to perceive, localize, and operate in unstructured environments like warehouses, factories, and outdoor settings.
How NVIDIA Isaac Perceptor Works
Today’s unstructured environments pose unique predictability challenges for AMRs, including task-specific complexities like load pickup and dropoff. NVIDIA-accelerated libraries and AI models help you overcome these complexities by enabling advanced 3D perception capabilities that ensure optimal performance and modularity for your specific needs.
You can integrate one or all of Perceptor’s technologies into your own AMR software stack to achieve advanced AI for perception capabilities or evaluate it with the NVIDIA Nova Orin Developer Kit.

Key Benefits
Fully Optimized for Mobile Robots
Explore technologies that are purpose-built for developers of autonomous forklifts and industrial mobile robots, powering robust visual odometry and 3D surround vision for obstacle detection, and occupancy mapping.
Scalable Sensor Architecture
Tap into the industry’s first scalable architecture for one to eight cameras with time synchronization across all the cameras and Inertial Measurement Units (IMUs).
Ready for Deployment
Take advantage of pre-integrated, extensively tested subgraphs for mobile robots to ensure seamless integration with existing software stacks and robots.
Key Features

Real-Time 3D Occupancy Grid
Get results 100X faster than with CPU-centric methods using nvblox. This NVIDIA® CUDA®-accelerated 3D reconstruction library can identify obstacles up to 5 meters away to provide a 2D costmap.
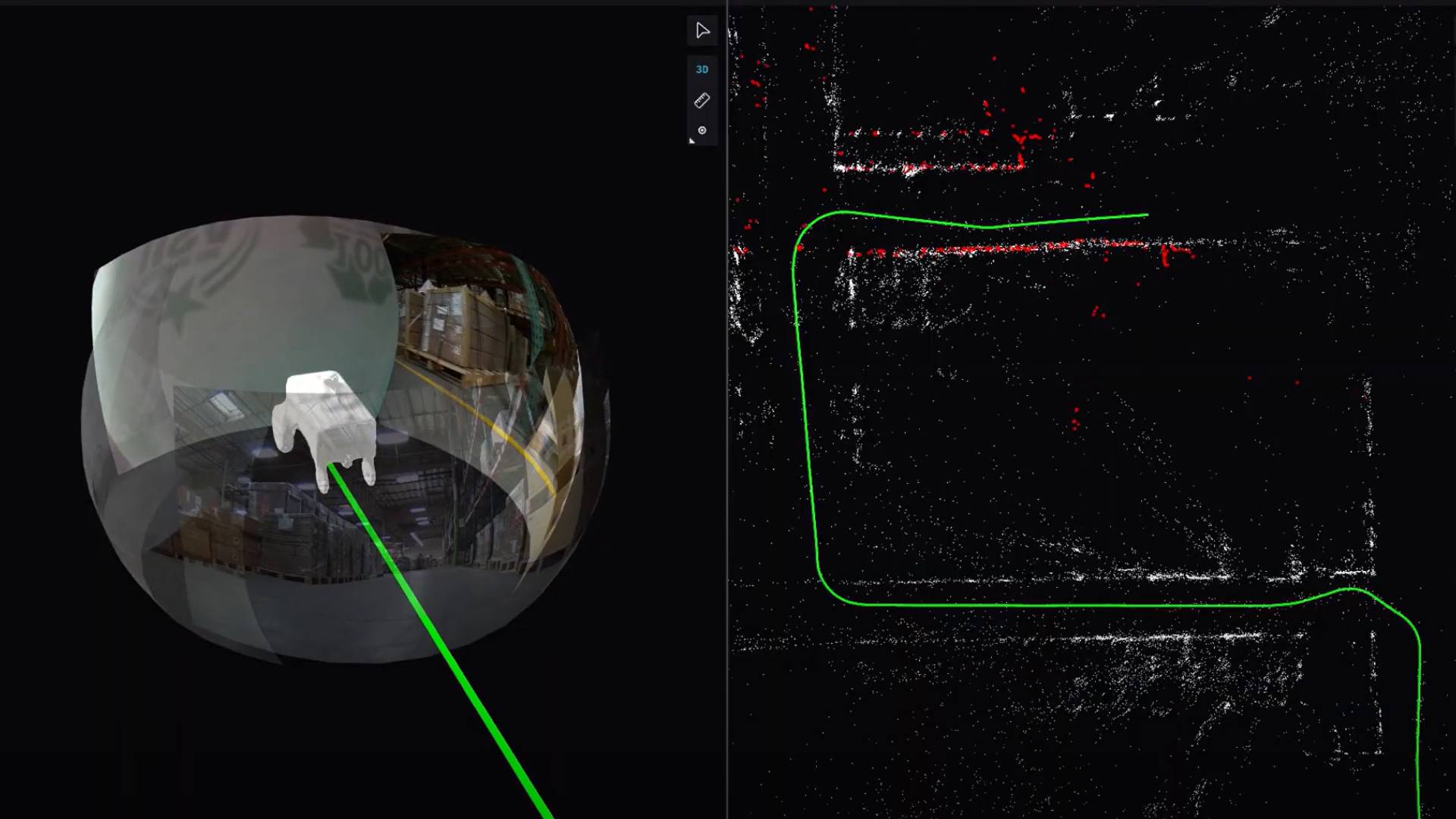
Accelerated Stereo Visual Odometry
Seamlessly navigate environments with sparse visual features or repetitive patterns by fusing input from multiple viewpoints using NVIDIA cuVSLAM.

AI-Based Depth Perception
Take advantage of stereo DNN for dense, detailed, robust complexity. The stereo disparity is calculated from a time-synchronized image pair sourced from a stereo camera and used to produce a depth image or a point cloud for a scene.
Open Ecosystem
Built on ROS
NVIDIA Isaac Manipulator is built on the open-source ROS 2 (Robot Operating System) software framework. This lets the millions of developers in the ROS community easily take advantage of NVIDIA-accelerated libraries and AI models to accelerate their AI robot development and deployment workflows.
Learn More About Isaac ROSROS is a trademark of Open Robotics
Wheel.me Self-Driving Robots Use RGo and the NVIDIA Isaac Platform
Wheel.me stands out with its ambitious mission: to transform anything that moves into an autonomous mobile robot (AMR). Learn how the company, in collaboration with NVIDIA and RGo Robotics, is reshaping the landscape of mobile robotics.
Isaac Perceptor Learning Library
More Resources



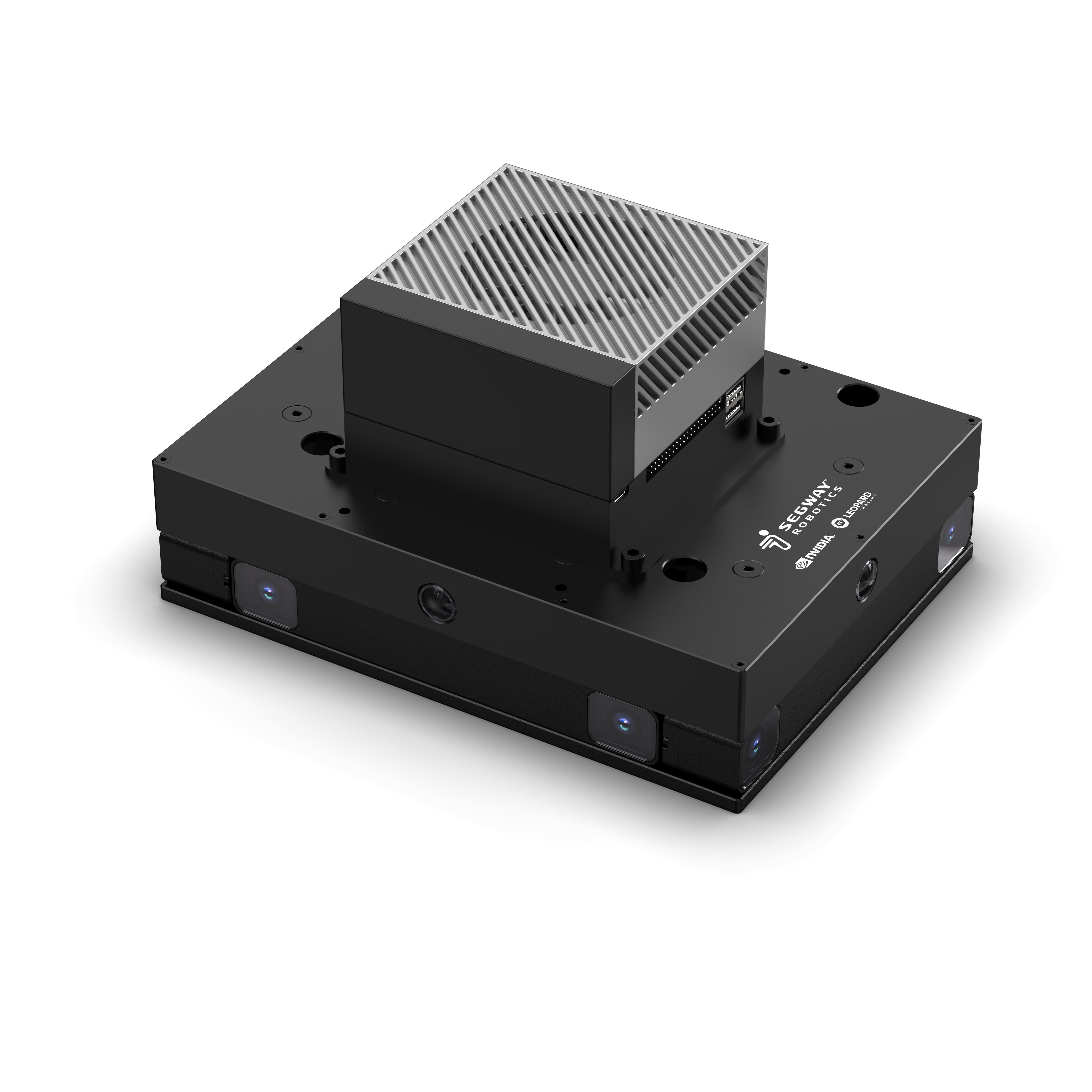
NVIDIA Nova Orin Developer Kit
This powerful compute and sensor platform is designed to help robot OEMs and software companies accelerate the development and deployment of AMRs. Key features include:
Precise, multi-sensor time synchronization within <100us of sensor data acquisition time
Documentation and software for evaluation on your robot
Sensor reference models (in NVIDIA Isaac Sim) for development in simulation.
Get yours today from Leopard Imaging or Segway Robotics.
Ecosystem
Our industry partners and collaborators are integrating NVIDIA Isaac Perceptor and accelerated computing into their platforms and solutions.