Abstract
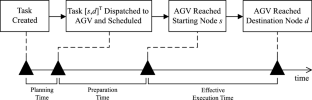
Automated guided vehicles (AGVs) are driverless robotic vehicles that pick up and deliver materials. Finding ways to improve efficiency while preventing deadlocks is a core issue in designing AGV systems. In this paper, we propose an approach to improve the efficiency of traditional deadlock-free scheduling algorithms. Typically, AGVs have to travel to designated starting locations from their parking locations to execute tasks, the time required for which is referred to as preparation time. The proposed approach aims at reducing the preparation time by predicting the starting locations for future tasks and then making decisions on whether to send an AGV to the predicted starting location of the upcoming task, thus reducing the time spent waiting for an AGV to arrive at the starting location after the upcoming task is created. Cases in which wrong predictions have been made are also addressed in the proposed method. Simulation results show that the proposed method significantly improves efficiency, up to 20–30% as compared with traditional methods.








Similar content being viewed by others

References
Araki, T., Sugiyama, Y., & Kasami, T. (1977). Complexity of the deadlock avoidance problem. In: 2nd IBM symposium on mathematical foundations of computer science, pp. 229–257.
Brezonik, L., Fister, I., & Podgorelec, V. (2018). Scrum task allocation based on particle swarm optimization, pp. 38–49.
Chao, G., Zza, B., Sla, B., & Jga, B. (2019). Multi-objective particle swarm optimization for multi-workshop facility layout problem. Journal of Manufacturing Systems, 53, 32–48.
Chen, Y., Du, C., Chen, J., & Yu, W. (2021). Cooperative task allocation of multiple via vs based on greedy algorithm. In: 2021 IEEE 4th international conference on computer and communication engineering technology (CCET), pp. 408–413.
Cheng, H., Tan, P., Gao, J., & Scripps, J. (2006). Multistep-ahead time series prediction. In 2006 Pacific-Asia conference on knowledge discovery and data mining, pp. 765–774. Springer.
Chen, Y., Zhuang, L., Zhu, L., Shao, X., & Wang, H. (2017). Research on path planing of parking system based on the improved dijkstra algorithm. Modern Manufacturing Engineering, 443(8), 63–67.
Confessore, G., Fabiano, M., & Liotta, G. (2013). A network flow based heuristic approach for optimising AGV movements. Journal of Intelligent Manufacturing, 24(2), 405–419.
Correa, A. I., Langevin, A., & Rousseau, L. M. (2007). Scheduling and routing of automated guided vehicles: A hybrid approach. Computers Operations Research, 34, 1688–1707.
Cortes, C., & Vapnik, V. N. (1995). Support vector networks. Machine Learning, 20, 273–297.
Desaulniers, G., Langevin, A., Riopel, D., & Villeneuve, B. (2003). Dispatching and conflict-free routing of automated guided vehicles: An exact approach. International Journal of Flexible Manufacturing Systems, 15, 309–331.
Diaconescu, E. (2008). The use of NARX neural networks to predict chaotic time series. Wseas Transactions on computer research, 3(3), 182–191.
Fraunhofer Institute for Material Flow and Logistics (IML). The open transportation control system. https://www.opentcs.org/en/index.html. Accessed: 2019-08-30.
Gen, M., & Lin, L. (2014). Multiobjective evolutionary algorithm for manufacturing scheduling problems: State-of-the-art survey. Journal of Intelligent Manufacturing, 25(5), 849–866.
Gers, F. A., & Schmidhuber, E. (2001). LSTM recurrent networks learn simple context-free and context-sensitive languages. IEEE Transactions on Neural Networks, 12(6), 1333–1340.
Grunow, M., Günther, H.-O., & Lehmann, M. (2006). Strategies for dispatching AGVs at automated seaport container terminals. OR Spectrum, 28(4), 587–610.
Gueniche, T., Fournier-Viger, P., & Tseng, V. S. (2013). Compact prediction tree: A lossless model for accurate sequence prediction. In International conference on advanced data mining and applications pp. 177–188. Berlin: Springer.
Hamzeei, M., Farahani, R. Z., & Rashidi-Bejgan, H. (2013). An exact and a simulated annealing algorithm for simultaneously determining flow path and the location of p/d stations in bidirectional path - sciencedirect. Journal of Manufacturing Systems, 32, 648–654.
He, Z. (2011). Research on improved greedy algorithm for train rescheduling. In: 2011 seventh international conference on computational intelligence and security. IEEE, pp. 1197–1200.
Hochreiter, S., & Schmidhuber, J. (1997). Long short-term memory. Neural Computation, 9(8), 1735–1780.
Jerald, J., Asokan, P., Saravanan, R., & Delphin Carolina Rani, A. (2006). Simultaneous scheduling of parts and automated guided vehicles in an FMS environment using adaptive genetic algorithm. The International Journal of Advanced Manufacturing Technology, 29(5), 584–589.
Klyne, A., & Merrick, K. (2015). Task allocation using particle swarm optimisation and anomaly detection to generate a dynamic fitness function. Springer, Cham, pp. 317–329.
Kmiecik, W., Wojcikowski, M., Koszalka, L., & Kasprzak, A. (2010). Task allocation in mesh connected processors with local search meta-heuristic algorithms. In: Asian conference on intelligent information database systems.
Krishnamurthy, N. N., & Karwan, B. M. H. (1993). Developing conflict-free routes for automated guided vehicles. Operations Research, 41, 1077–1090.
Lee, S., Kahng, H. G., Cheong, T., & Kim, S. B. (2019). Iterative two-stage hybrid algorithm for the vehicle lifter location problem in semiconductor manufacturing - sciencedirect. Journal of Manufacturing Systems, 51, 106–119.
Li, X., Liu, Z., & Tan, F. (2017). Multi-robot task allocation based on cloud ant colony algorithm. In I. V. Part (Ed.), Neural information processing–24th international conference, ICONIP 2017, Guangzhou, China, November 14–18, 2017 (pp. 3–10). Springer.
Liu, C., & Kroll, A. (2012). A centralized multi-robot task allocation for industrial plant inspection by using a* and genetic algorithms. In Proceedings of the 11th international conference on artificial intelligence and soft computing - volume Part II.
Luo, J. C., Xing, K. Y., Zhou, M. C., Li, X. L., & Wang, X. N. (2017). Scheduling of deadlock and failure-prone automated manufacturing systems via hybrid heuristic search. International Journal of Production Research, 55(11), 3283–3293.
Marquez, J. (1995). Time series analysis. International Journal of Forecasting, 11, 494–495.
Mosteo, A. R., & Montano, L. (2006). Simulated annealing for multi-robot hierarchical task allocation with flexible constraints and objective functions. In: Workshop on network robot systems: Toward intelligent robotic systems integrated with environments at IROS 2006.
Pandit, S. M., & Wu, S. M. (1983). Time series and system analysis with applications. Reprint of the orig. Wiley.
Rashidi, H., & Tsang, E. P. K. (2011). A complete and an incomplete algorithm for automated guided vehicle scheduling in container terminals. Computers and Mathematics with Applications, 61(3), 630–641.
Reveliotis, S., & Masopust, T. (2019). Efficient liveness assessment for traffic states in open, irreversible, dynamically routed, zone-controlled guidepath-based transport systems. IEEE Transactions on Automatic Control (Early Access), pp. 1–16
Reveliotis, S. A. (2000). Conflict resolution in AGV systems. IIE Transactions, 32(7), 647–659.
Sabattini, L., Digani, V., Lucchi, M., Secchi, C., & Fantuzzi, C. (2015). Mission assignment for multi-vehicle systems in industrial environments. IFAC-PapersOnLine, 48(19), 268–273.
Sharda, B., & Banerjee, A. (2013). Robust manufacturing system design using multi objective genetic algorithms, petri nets and Bayesian uncertainty representation. Journal of Manufacturing Systems, 32, 315–324.
Shin, H. S., Li, T., & Segui-Gasco, P. (2019). Sample greedy based task allocation for multiple robot systems. Swarm Intelligence, 16(3), 233–260.
Smolic-Rocak, N., Bogdan, S., Kovacic, Z., & Petrovic, T. (2009). Time windows based dynamic routing in multi-AGV systems. IEEE Transactions on Automation Science and Engineering, 7(1), 151–155.
Sutskever, I., Vinyals, O., & Le, Q. V. (2014) Sequence to sequence learning with neural networks. Advances in Neural Information Processing Systems, pp. 3104–3112.
Tanaka, Y., Nishi, T., & Inuiguchi, M. (2010). Dynamic optimization of simultaneous dispatching and conflict-free routing for automated guided vehicles. Journal of Advanced Mechanical Design, Systems, and Manufacturing, 4(3), 701–715.
Thapa, R. (2020). A survey on deep learning-based methodologies for solving combinatorial optimization problems.
Wu, N., & Zhou, M. (2004). Modeling and deadlock control of automated guided vehicle systems. IEEE/ASME Transactions on Mechatronics, 9(1), 50–57.
Yen, J. Y. (1971). Finding the \(k\) shortest loopless paths in a network. Management Science, 17(11), 712–716.
Yu, J., & Lavalle, S.M. (2015). Optimal multi-robot path planning on graphs: Structure and computational complexity. arXiv preprint, arXiv:1507.03289.
Zajc, J., & Maopolski, W. (2021). Structural on-line control policy for collision and deadlock resolution in multi-AGV systems. Journal of Manufacturing Systems, 60, 80–92.
Zhang, Z., Bo, C., & Chen, W. (2016). Dynamic routing of automated guided vehicles with time window. Microcomputer Applications, 32(11), 46–49.
Zhang, L., Sun, J., Guo, C., & Zhang, H. (2018). A multi-swarm competitive algorithm based on dynamic task allocation particle swarm optimization. Arabian Journal for Science and Engineering, 43, 8255–8274.
Acknowledgements
This work was supported by the Key Technologies Research and Development Program under Grant No. 2021YFB2012100, the Natural Science Foundation of Hunan Province under Grant No. 2021JJ30146, and the National Natural Science Foundation of China under Grant No. 61603131.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Fan, H., Li, D., Ouyang, B. et al. Improving scheduling in multi-AGV systems by task prediction. J Sched 27, 299–308 (2024). https://doi.org/10.1007/s10951-023-00792-8
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10951-023-00792-8