
Zusammenfassung
Optische Messverfahren nach dem Prinzip der strukturierten Beleuchtung bedienen sich oftmals der Kombination eines Phasenschiebeverfahrens mit einem geeigneten Entfaltungsverfahren, um eine im Messbereich eindeutige Ortskodierung vorzunehmen. Ein leistungsfähiges Verfahren aus dieser Klasse stellt das Heterodyn-Phasenschiebeverfahren dar, welches auf der sequenziellen Registrierung mehrerer Phasenschiebesequenzen mit geringfügig unterschiedlicher Periodenlänge und Auswertung der synthetischen Schwebungssignale zwischen diesen basiert. Die geeignete Auswahl der hierfür zu kombinierenden Periodenlängen hat entscheidenden Einfluss sowohl auf die Robustheit des Entfaltungsverfahrens als auch auf die statistische Unsicherheit der resultierenden Ortskodierung. In dem vorliegenden Beitrag wird eine vorteilhafte Ausführungsform des Heterodynverfahrens vorgestellt und einer detaillierten Analyse im Hinblick auf seine statistischen Eigenschaften unterzogen. Im Ergebnis werden Kriterien zur Bestimmung geeigneter Periodenlängen formuliert, die eine Maximierung der Robustheit des Entfaltungsvorgangs und eine Minimierung der Unsicherheit der Ortskodierung ermöglichen.
Abstract
Optical measuring methods according to the principle of structured illumination often use the combination of a phase shift method with a suitable deconvolution method in order to carry out a spatial coding which is unequivocal within the measuring range. A powerful method of this class is the heterodyne phase shift method, which is based on the sequential registration of multiple phase shift sequences with slightly different period lengths and evaluation of the synthetic beat signals between them. The appropriate choice of the period lengths to be combined has a decisive influence both on the robustness of the deconvolution method and on the statistical uncertainty of the resulting spatial encoding. In the present article, an advantageous realization of the heterodyne method is presented and subjected to a detailed analysis with regard to its statistical properties. As a result, criteria for determining appropriate period lengths are formulated that allow for maximizing the robustness of the deployment process and minimizing the uncertainty of spatial coding.
1 Einleitung
Zur flächenhaften Erfassung von Werkstückoberflächen kommen heute oftmals optisch antastende Systeme zum Einsatz, bei welchen das Werkstück von einer oder mehreren elektronischen Kameras aufgezeichnet wird. Abhängig vom Messprinzip ist es hierbei erforderlich, eine optische Ortskodierung im Objektraum vorzunehmen. Prominenteste Beispiele entsprechender Systeme sind die sogenannten Streifenprojektionssensoren, bei welchen die zu erfassende Oberfläche mittels strukturierter Beleuchtung optisch kodiert wird, um in der Folge homologe Bildpunkte identifizieren und die Oberfläche mittels Triangulation rekonstruieren zu können [1]. Hinsichtlich der angewendeten Grundtechniken verwandt ist der Streifenprojektion die phasenmessende Deflektometrie, bei welcher jedoch nicht das Werkstück selbst, sondern eine im Raum verkörperte Referenzstruktur mit einer optischen Kodierung beaufschlagt wird [2], [3].
Zur flächenhaften optischen Kodierung können grundsätzlich die unterschiedlichsten Muster eingesetzt werden, jedoch erweist sich als die verbreitetste, weil potentiell genaueste Technik die Kodierung mittels Phasenschiebeverfahren unter Verwendung sinusförmiger Streifenmuster [1]. Aufgrund der Periodizität dieser Streifenmuster ist jedoch allein mit einer Phasenschiebeauswertung noch keine im gesamten Messbereich eindeutige Ortskodierung möglich, sondern der Eindeutigkeitsbereich der Phasenmessung erstreckt sich zunächst nur über eine Periode des zugrunde liegenden Sinusmusters. Um diese Mehrdeutigkeit aufzulösen, muss ein geeignetes Entfaltungsverfahren angewendet werden. Im Bereich der strukturierten Beleuchtung kommen meist zeitliche Entfaltungsverfahren zur Anwendung, die auf der Aufzeichnung zusätzlicher Mustersequenzen basieren. Einen in der Gesamtheit seiner Eigenschaften besonders vorteilhaften Ansatz hierzu stellt das sogenannte Heterodynverfahren dar, welches auf der sequenziellen Aufzeichnung mehrerer Phasenschiebesequenzen leicht unterschiedlicher Periodenlänge basiert [4].
Bei der praktischen Umsetzung des Heterodynverfahrens stellt sich unweigerlich die Frage, wie die Wellenlängen der verwendeten Sinusmuster gewählt werden sollten, um möglichst zuverlässige Ergebnisse zu erzielen. Gegenstand des vorliegenden Beitrags ist es, hierzu mathematisch fundierte aber zugleich anwendungsnahe Kriterien zu formulieren, die geeignet sind, sowohl die Robustheit des Verfahrens im Sinne der Vermeidung von Entfaltungsfehlern zu optimieren, als auch die statistische Unsicherheit der resultierenden Ortskodierung zu minimieren. Hierzu wird in Abschnitt 2 zunächst allgemein auf die Grundlagen von Phasenschiebe- und Entfaltungsverfahren eingegangen, bevor in Abschnitt 3 eine für die weiteren Betrachtungen zugrunde gelegte, vorteilhafte Ausführungsform des Heterodynverfahrens vorgestellt wird, wie sie insbesondere für die Streifenprojektion oder die phasenmessende Deflektometrie angewendet werden kann. Aufbauend hierauf erfolgt in Abschnitt 4 eine kurze Beschreibung der auftretenden Entfaltungsfehler, ehe in Abschnitt 5 eine detaillierte statistische Analyse des Entfaltungsprozesses durchgeführt wird und Kriterien zur Minimierung der Auftretenswahrscheinlichkeit der unterschiedlichen Arten von Entfaltungsfehlern formuliert werden. Ergänzend hierzu wird in Abschnitt 6 eine experimentelle Methode zur aufgabenspezifischen Bestimmung der hinsichtlich der statistischen Unsicherheit der Ortskodierung optimalen Basiswellenlänge vorgestellt.
2 Phasenschiebe- und Entfaltungsverfahren
Die Orts- oder Abstandskodierung unter Verwendung sinusförmig modulierter Signale ist ein in vielen Bereichen der Messtechnik etabliertes Verfahren, welches abhängig vom eingesetzten Messprinzip unterschiedliche Erscheinungsformen aufweist. Im verbreiteten Fall flächenhaft antastender optischer Messverfahren wie der Formprüfinterferometrie, der Streifenprojektion oder der phasenmessenden Deflektometrie registrieren elektronische Kameras zunächst Bilder sinusförmiger Streifenmuster, deren geometrische Verzerrung Rückschlüsse auf die Form des Prüflings zulässt. Als eigentliche Kodierung dient dabei stets der Phasenwinkel φ innerhalb des periodischen Sinusmusters. Da jedoch die beobachtbare lokale Intensität I innerhalb des Sinusmusters gemäß Gleichung (1) nicht nur von dem gesuchten Phasenwinkel φ abhängt, sondern auch von den lokal variierenden Größen Modulation M und Hintergrundintensität
Dieses als Phasenschiebeauswertung bezeichnete Vorgehen führt zu einer Ortskodierung in Gestalt der relativen Phase φ, deren Eindeutigkeitsbereich lediglich eine Periode des zugrundeliegenden Sinusmusters umfasst. Es kann also zunächst nicht entschieden werden, zu welcher Periode des Sinusmusters der jeweils betrachtete Bildpunkt gehört. Die Auflösung dieser Mehrdeutigkeit ist Gegenstand der sogenannten Entfaltungsverfahren, welche im Ergebnis den Übergang von der mehrdeutigen relativen Phase φ zu der innerhalb des Messbereichs eindeutigen absoluten Phase Φ bewerkstelligen.
Die bekannten Entfaltungsverfahren lassen sich in zwei grundsätzlich unterschiedliche Verfahrensklassen unterteilen, nämlich einerseits räumliche und andererseits zeitliche Ansätze. Die räumlichen Entfaltungsverfahren basieren auf der Auswertung von Nachbarschaftsbeziehungen in der zu entfaltenden relativen Phase und setzen dabei die Annahme einer zumindest abschnittsweisen Stetigkeit der kodierten Oberfläche voraus. Räumliche Entfaltungsverfahren sind insbesondere im Bereich der Formprüfinterferometrie weit verbreitet, da dort die Prüflinge meist eine global stetige Topografie aufweisen.
Die zeitlichen Entfaltungsverfahren ermöglichen hingegen eine robuste und zudem hinsichtlich der absoluten Streifenordnung eindeutige Phasenentfaltung auch an unstetigen Oberflächen, da sie prinzipbedingt für jeden einzelnen Bildpunkt – also insbesondere ohne Betrachtung seiner Nachbarschaft – die Berechnung der absoluten Phase zulassen. Allen zeitlichen Entfaltungsverfahren ist gemein, dass sie die Aufzeichnung zusätzlicher Bilder über die reine Phasenschiebesequenz hinaus erfordern und damit die für den Messvorgang benötigte Zeitdauer erhöhen. Dennoch sind insbesondere bei den auch für die Erfassung komplexer Werkstücke geeigneten Streifenprojektionssensoren die zeitlichen Entfaltungsverfahren nahezu konkurrenzlos und auch auf dem angrenzenden Gebiet der phasenmessenden Deflektometrie sind diese weit verbreitet.
Erhebliche Unterschiede zwischen den verschiedenen Ansätzen der zeitlichen Phasenentfaltung sind hinsichtlich Art und Anzahl der zusätzlich erforderlichen Muster sowie deren algorithmischer Auswertung zu verzeichnen. Das vielleicht einfachste und zumindest auf dem Gebiet der strukturierten Beleuchtung früheste Verfahren stellt die Nutzung binärer Streifenmuster in Gestalt einer Graycode-Sequenz dar [5], [6]. Als nachteilig erweist sich bei diesem Ansatz seine Fehleranfälligkeit, welche insbesondere bei Defokussierung oder schmaler werdenden Streifen stark zunimmt, da dann im Bereich der unscharf abgebildeten Kantenübergänge vermehrt Fehlentscheidungen auftreten [7].
Als leistungsfähiger erweist sich die Klasse jener zeitlicher Entfaltungsverfahren, welche auf der Kombination mehrerer Phasenschiebesequenzen unterschiedlicher Periodenlängen basieren. Durch rechnerische Bestimmung synthetischer Wellenlängen ermöglichen diese Verfahren eine vergleichsweise robuste Entfaltung und werden aufgrund der ausschließlichen Nutzung sinusförmiger Streifenmuster von Unschärfeeffekten im Bild typischerweise nur unwesentlichen beeinträchtigt. Im Wesentlichen fallen drei konkrete Ansätze in diese Verfahrensklasse: Das hierarchische Mehrfrequenzverfahren [8], das Heterodynverfahren [4] und ein zahlentheoretischer Ansatz auf Basis teilerfremder Periodenlängen [9]. Sowohl das Mehrfrequenzverfahren als auch der zahlentheoretischen Ansatz basieren auf der Auswertung von Streifenmustern mit deutlich unterschiedlicher Periodenlänge. Dabei ist eine kurze Basiswellenlänge für die Erzielung einer hohen Ortsauflösung der Phasenkodierung zuständig, während die zusätzlich erfassten, deutlich größeren Wellenlängen hauptsächlich der Entfaltung dienen. Das Heterodynverfahren basiert hingegen auf der Nutzung mehrerer, vergleichsweise dicht benachbarter Wellenlängen. Auch hierbei wird durch Berechnung synthetischer Schwebungssignale eine robuste Entfaltung der Eingangssignale ermöglicht. Zusätzlich stellt jedoch auch jedes der kurzwelligen Signale eine hochaufgelöste Ortsinformation bereit. Durch gewichtete Mittelung der typischerweise drei unabhängigen Phasensignale kann das Rauschniveau folglich ohne Mehraufwand um nahezu den Faktor
Der von Zuo et al. [7] für einen vereinfachten Fall angestellte direkte Vergleich der drei genannten, auf Phasensignalen unterschiedlicher Periodenlänge basierenden Entfaltungsverfahren zeigt, dass das Heterodynverfahren hinsichtlich seiner Robustheit unter ansonsten gleichen Randbedingungen den beiden anderen Verfahren etwas unterlegen ist. Aufgrund der beschriebenen Möglichkeit der Mittelung mehrere Phasensignale weist es jedoch zugleich einen besseren Informationswirkungsgrad auf, da die zusätzlichen Phasensequenzen nicht nur zur Entfaltung selbst herangezogen werden, sondern zugleich die statistische Unsicherheit der Phasenkodierung reduzieren. Das Heterodynverfahren erscheint daher trotz seiner etwas geringeren Robustheit als das für viele Anwendungsfälle vorteilhafteste Entfaltungsverfahren.
Die von Zuo et al. [7] angenommene Vereinfachung gegenüber praxisnahen Implementierungen besteht konkret in der Nutzung lediglich zweier unterschiedlicher Periodenlängen. Eine an realen Betriebsbedingungen orientierte Analyse des Entfaltungsprozesses führt jedoch zu der Feststellung, dass in der Praxis typischerweise drei unterschiedliche Wellenlängen erforderlich sind, um die gewünschten Eindeutigkeitsbereiche mit hinreichender Robustheit kodieren zu können [3], [4]. Sofern für einen konkreten Anwendungsfall die Basiswellenlänge sowie der gewünschte Eindeutigkeitsbereich definiert sind, existieren offensichtlich unterschiedlichste Kombinationen weiterer Periodenlängen, die allesamt grundsätzlich geeignet sind, eine Entfaltung der Phasensignale auszuführen. Diese Uneindeutigkeit hinsichtlich der zu kombinierenden Periodenlängen führt unweigerlich zu der Fragestellung, ob Kombinationen existieren, die sich als besonders vorteilhaft im Sinne einer optimierten Robustheit erweisen und nach welchen Kriterien sich diese vorteilhaften Kombinationen ermitteln lassen.
Für das Mehrfrequenzverfahren wurden entsprechende statistische Betrachtungen von Towers et al. [10] angestellt. Für das hier betrachtete Heterodynverfahren sind entsprechende Analysen bislang hingegen nicht bekannt. Obgleich es im Einzelfall also vergleichsweise trivial ist, grundsätzlich geeignete Wellenlängenkombinationen zu identifizieren, ist bislang nicht untersucht worden, wie stark sich unterschiedliche Wellenlängensets hinsichtlich ihrer Robustheit unterscheiden und für welche Kombination ein optimales Ergebnis zu erwarten ist. Der vorliegende Beitrag hat zum Gegenstand, diese Lücke zu schließen, indem für eine vorteilhafte, praxisnahe Implementierung des Heterodynverfahrens, mathematisch fundierte Kriterien zur Bestimmung einer optimalen Kombination von Wellenlängen formuliert werden.
3 Grundlagen des Heterodynverfahres
Bei Messverfahren, die auf der Registrierung periodischer Signale basieren, kann der Eindeutigkeitsbereich der Messung deutlich gesteigert werden, indem mehrere Signale unterschiedlicher Wellenlänge λ simultan oder sequenziell beobachtet werden. Der hierdurch nutzbare Effekt besteht in der bei Überlagerung zweier solcher Signale entstehenden Überstruktur. Dieses als Schwebung bezeichnete Signal weist eine gegenüber den Einzelsignalen erhöhte Wellenlänge
Um dieses Prinzip auf das Problem der absoluten Ortskodierung mittels strukturierter Beleuchtung anzuwenden, wird die Phasenschiebeauswertung nicht nur mit einer einzelnen Sequenz von gegeneinander phasenverschobenen Sinussignalen durchgeführt, sondern es wird mindestens eine weitere Sinussequenz ausgewertet, deren Wellenlänge sich von jener der ersten geringfügig unterscheidet [4]. An beiden Musterfolgen wird zunächst unabhängig voneinander eine Phasenschiebeauswertung durchgeführt, was – wie in Abb. 1 veranschaulich – zu zwei sägezahnförmigen Phasensignalen
Die Periodenlänge dieser relativen Phaseninformation ist jeweils identisch mit jener der zugrundeliegenden Sinussignale. Durch rechnerische Überlagerung beider Signale kann daher ein ebenfalls sägezahnförmiges Schwebungssignal mit gemäß Gleichung (2) erhöhter Wellenlänge ermittelt werden. Das dafür anwendbare Auswerteverfahren wird als phasenrichtige Subtraktion bezeichnet und ist in Abb. 1 anschaulich dargestellt.

Prinzip der phasenrichtigen Subtraktion.
Subtrahiert man die beiden periodischen Phasensignale mit Wellenlängen
Theoretisch wäre die so berechnete Schwebung direkt als absolute Phasenlage eines Punktes innerhalb des Eindeutigkeitsbereichs der Länge

Prinzip der Phasenentfaltung beim Heterodynverfahren.
Betrachtet man das zu entfaltende periodische Phasensignal
mit:
Im Fall abweichungsfreier Eingangssignale enthielte die so ermittelte Ordnungsfunktion
Da wie erwähnt Abweichungen der Eingangssignale
Für die korrekte Interpretation von Gleichung (9) sowie noch folgender Ausführungen in Abschnitt 5 ist an dieser Stelle hervorzuheben, dass es sich bei den mit der Voranstellung Δ gekennzeichneten Quantitäten nicht um statistische Unsicherheiten handelt und somit Gleichung (9) nicht als der Versuch einer klassischen Abweichungsfortpflanzung zu verstehen ist. Vielmehr wird hier für konkrete Einzelmesswerte eine Zerlegung in den richtigen Wert und in einen vorzeichenbehafteten Abweichungsanteil vorgenommen. In diesem Sinne kennzeichnet etwa der Ausdruck
In Abb. 2 ist, bezogen auf die nicht normierten Signale, die Schwelle aus Gleichung (9) als maximal zulässigen Abweichung
Im Hinblick auf eine absolute Ortskodierung unter Einsatz einer möglichst kurzen Mustersequenz wäre es wünschenswert, die Sinuswellenlängen
Bei Kombination von insgesamt drei Sinussignalen unterschiedlicher Wellenlänge kann hingegen unter gängigen Randbedingungen eine korrekte Entfaltung erreicht werden, wenn die Entfaltung in mehreren Schritten vorgenommen wird. Es wird daher für nachfolgende Betrachtungen der Einsatz dreier Wellenlängen
Durch das beschriebene Verfahren der phasenrichtigen Subtraktion werden somit – wie in Abb. 3 veranschaulicht – zunächst aus den durch Phasenschiebeauswertung direkt gewonnenen Signalen zu den Wellenlängen

Prinzip der sequenziellen Berechnung der Schwebungssignale aus den Eingangssignalen.
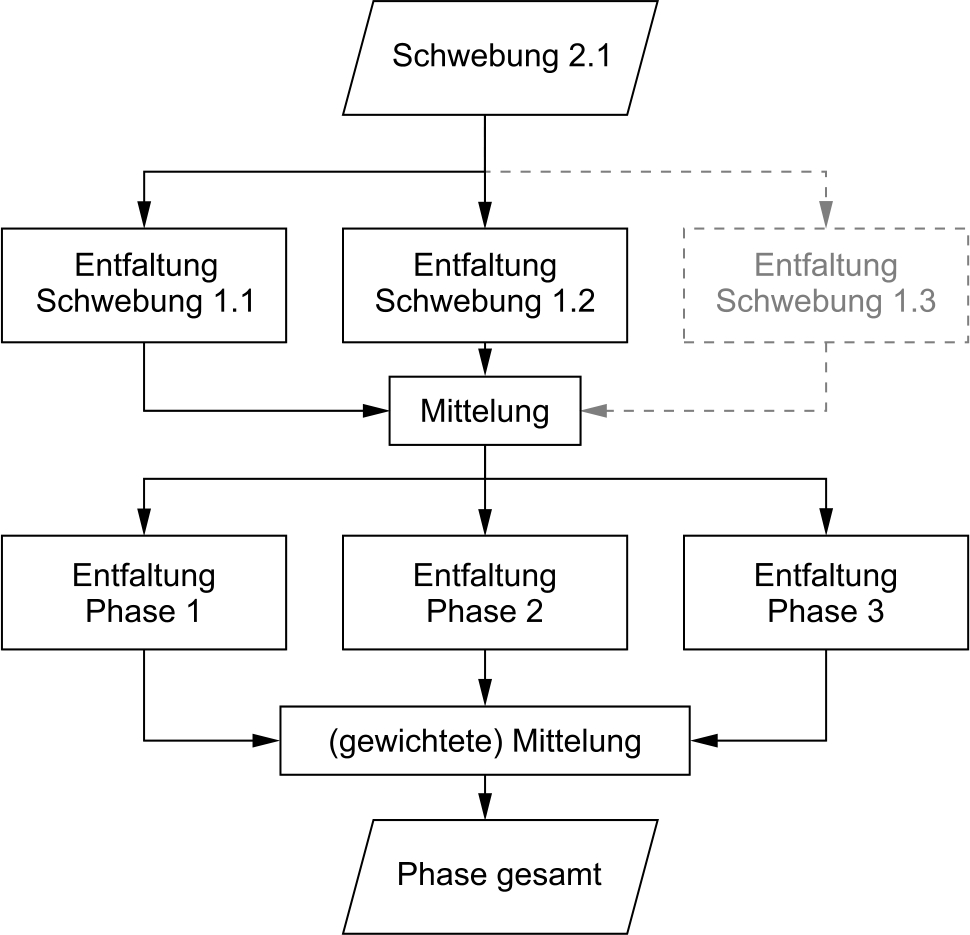
Prinzip der hierarchischen Entfaltung der Schwebungssignale sowie der Eingangssignale.
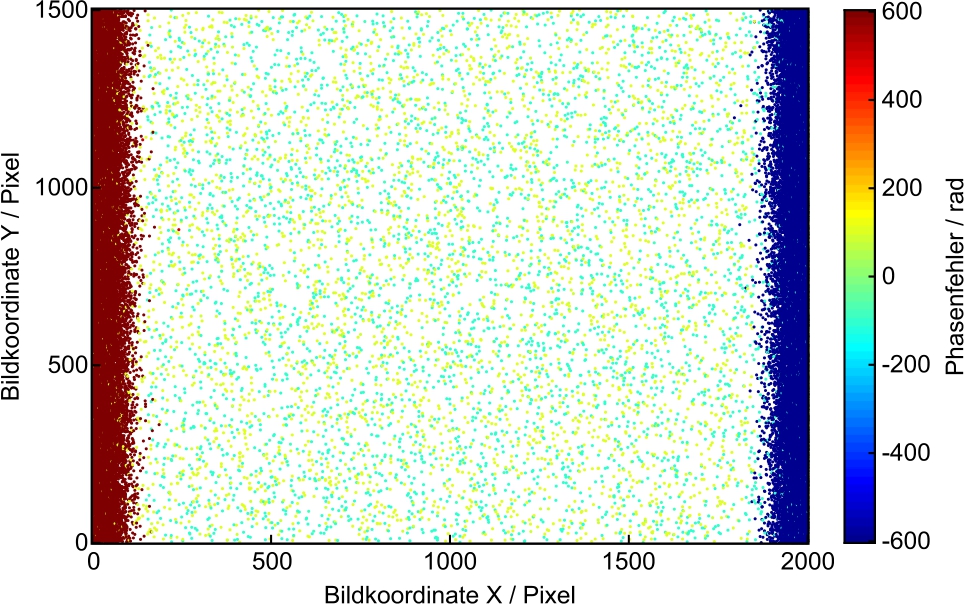
Exemplarische Simulation der Phasenfehler in einem Bild von
Die so erzeugten langwelligen Schwebungssignale der ersten und zweiten Stufe werden im Weiteren für die hierarchische Entfaltung der jeweils vorangegangenen Stufe genutzt. Wie in Abb. 4 dargestellt, werden mittels der im gesamten Auswertebereich eindeutigen Schwebung der zweiten Stufe die Schwebungssignale der ersten Stufe entfaltet. Diese entfalteten Schwebungssignale der ersten Stufe werden beispielsweise durch Mittelwertbildung miteinander fusioniert und das so resultierende Signal kann schließlich zur Entfaltung der drei Eingangssignale genutzt werden, deren – gegebenenfalls gewichteter – Mittelwert das finale Ergebnis der Phasenmessung darstellt.
4 Entfaltungsfehler
Um die bei der Entfaltung auftretenden Fehlentscheidungen zu veranschaulichen, ist in Abb. 5 das Ergebnis einer simulierten horizontalen Phasenkodierung gemäß des in Abschnitt 3 beschriebenen Berechnungsverfahren in einem virtuellen Bildbereich von
Wie aus Abb. 5 zu ersehen, sind offensichtlich unterschiedliche Typen von Entfaltungsfehlern zu verzeichnen. Am auffälligsten sind zunächst die Zonen entlang des linken und rechten Randes des Auswertebereichs, in welchen eine sehr hohe Anzahl von Fehlstellen mit betragsmäßig sehr großer Amplitude festzustellen ist. Diese Fehlstellen – im Folgenden als Fehlertyp 1 bezeichnet – resultieren aus der Berechnung der zweiten Schwebungsstufe mittels phasenrichtiger Subtraktion und treten prinzipbedingt in der Umgebung der Unstetigkeitsstelle der Phasenfunktion, hier also an den Enden des Eindeutigkeitsbereichs, auf [7]. Darüber hinaus sind Fehlstellen zu erkennen, die gleichmäßig im gesamten Auswertebereich verteilt sind und deutlich geringere betragsmäßige Amplituden aufweisen. Diese im Weiteren als Fehlertyp 2 bezeichneten Fehlstellen resultieren aus der Entfaltung der Signale der ersten Schwebungsstufe sowie der Entfaltung der Eingangssignale. Ihre Amplitude hängt zum einen davon ab, in welcher Entfaltungsstufe die zugehörige Fehlentscheidung aufgetreten ist und ob gegebenenfalls mehrere Fehlentscheidungen gleichzeitig – in derselben oder auch in unterschiedlichen Entfaltungsstufen – aufgetreten sind. Die statistische Analyse des Entfaltungsvorgangs im Hinblick auf die Entstehung der gezeigten Entfaltungsfehler, sowie die Formulierung von Kriterien zur Minimierung der Auftretenswahrscheinlichkeiten derselben sind Gegenstand des nachfolgenden Abschnitts 5.
5 Statistische Analyse des Entfaltungsvorgangs
Ausgehend von den vorangegangenen Beschreibungen des Entfaltungsprozesses mittels Heterodynverfahren sowie den aufgezeigten Fehlertypen wird im Folgenden eine detaillierte statistische Analyse des gesamten Auswertevorgangs durchgeführt, beginnend mit den drei rauschbehafteten Eingangsphasen
Die Schwebungssignale 1.1, 1.2 und 2.1 entstehen durch phasenrichtige Subtraktion aus den Eingangsphasen
Die Ordnungsfunktion
Für das zweite Schwebungssignal der ersten Stufe
Für die Abweichungen von
Da zur Entfaltung der Signale die Ordnungsfunktion mathematisch auf die nächstliegende ganze Zahl gerundet wird, muss zur Vermeidung einer Fehlbestimmung der Ordnung allgemein gelten:
Zur sich anschließenden Entfaltung der Eingangssignale
Der Mittelwert der mit Hilfe des Wellenlängenverhältnisses aufeinander skalierten Schwebungssignale beträgt damit:
Da das Produkt aus ganzzahliger, gerundeter Streifenordnung und konstanter Amplitude A in den entfalteten absoluten Phasen
Die Ordnungsfunktion zur Entfaltung des Phasensignals
Da wie ausgeführt die in
Mit analoger Herleitung ergibt sich für die Abweichungen der Ordnungsfunktionen
Korrelationskoeffizienten der Abweichungen der Ordnungsfunktionen, ermittelt in 1 Mrd. Wiederholungen mit
| 1 | 0,9947 | 0,9998 | −0,2529 | −0,1381 | |
| 0,9947 | 1 | 0,9963 | −0,152 | −0,0359 | |
| 0,9998 | 0,9963 | 1 | −0,236 | −0,1209 | |
| −0,2529 | −0,152 | −0,236 | 1 | 0,9893 | |
| −0,1381 | −0,0359 | −0,1209 | 0,9893 | 1 |
Maßgeblich für das Auftreten von Entfaltungsfehlern sind letztlich jedoch nicht direkt die Korrelationen auf Ebene der Abweichungen der Ordnungsfunktionen, sondern jene auf Ebene der Fehlentscheidungen, also der Verletzung der Bedingung aus Gleichung (19). Es müssen also im Weiteren daher jene Signale betrachtet werden, die aus den Abweichungen der Ordnungsfunktionen durch die Auswertung der Bedingung für eine Fehlentscheidung hervorgehen. Diese Funktion kann geschrieben werden als:
Auf Ebene dieser Fehlerfunktion E für die einzelnen Entfaltungsvorgänge zeigt sich, dass nahezu alle in den Signalen
Koinzidenzmatrix der Fehlentscheidungen bei Auswertung der Ordnungsfunktionen, ermittelt mit Parametern wie in Tab. 1. Ablesebeispiel: Von den in
| vorhergesagte Größe | ||||||
 | 1 | 0,9395 | 0,9925 | 0,0109 | 0,0048 | |
| 0,7509 | 1 | 0,7931 | 0,004 | 0,0018 | ||
| 0,9486 | 0,9484 | 1 | 0,0093 | 0,004 | ||
| 0,0109 | 0,0051 | 0,0097 | 1 | 0,9688 | ||
| 0,0025 | 0,0012 | 0,0021 | 0,5022 | 1 | ||
Aufgrund dieser Korrelationen entspricht die Fehlerrate in einer Entfaltungsstufe in sehr guter Näherung der maximalen Einzelwahrscheinlichkeit in dieser Stufe, da aufgrund des binären Entscheidungscharakters sich die Fehlerraten bei Korrelation gerade nicht addieren. Es können daher die Abweichungen
Unter Annahme von (29) kann für die maßgeblichen Unsicherheiten der Ordnungsfunktionen
Hierin steht P für die Summenfunktion der Standardisierten Normalverteilung. Als relevante Unsicherheiten
Die Fehlentscheidungen in den Stufen 0 und 1 entsprechen jeweils einer Binomialverteilung mit den Einzelwahrscheinlichkeiten
Der subtraktive Anteil
Wenn die Basiswellenlänge
Dabei sind als zusätzliche Nebenbedingungen anzusetzen:
Da das vorgenannte Optimierungsproblem sich in der Umsetzung als vergleichsweise anspruchsvoll erweist und zudem die Unsicherheit
So konnte beobachtet werden, dass für kleine Phasenunsicherheiten – und damit kleine Fehlerraten – die optimale Lösung gemäß Gleichung (34) zugleich dadurch gekennzeichnet ist, dass gilt:
Für größere Fehlerraten kann die optimale Lösung gemäß Gleichung (34) zwar zu einem hiervon abweichenden Verhältnis von
Unter Annahme der Gültigkeit von Gleichung (29) sind die Wellenlängen
Auch hierbei sind wiederum die Nebenbedingungen gemäß Gleichungen (35) und (36) zu berücksichtigen.
Um die Auswirkungen eines gemäß Gleichungen (34) oder (38) optimierten Wellenlängenverhältnisses aufzuzeigen, wurden Monte-Carlo-Simulationen durchgeführt, in deren Zuge die Fehlerwahrscheinlichkeit in Abhängigkeit des relativen Phasenrauschens der Eingangssignale für unterschiedliche Wellenlängenverhältnisse verglichen wurde. Hierzu wurden zwei einfache, aber naheliegende Alternativansätze zur Bestimmung der Wellenlängen
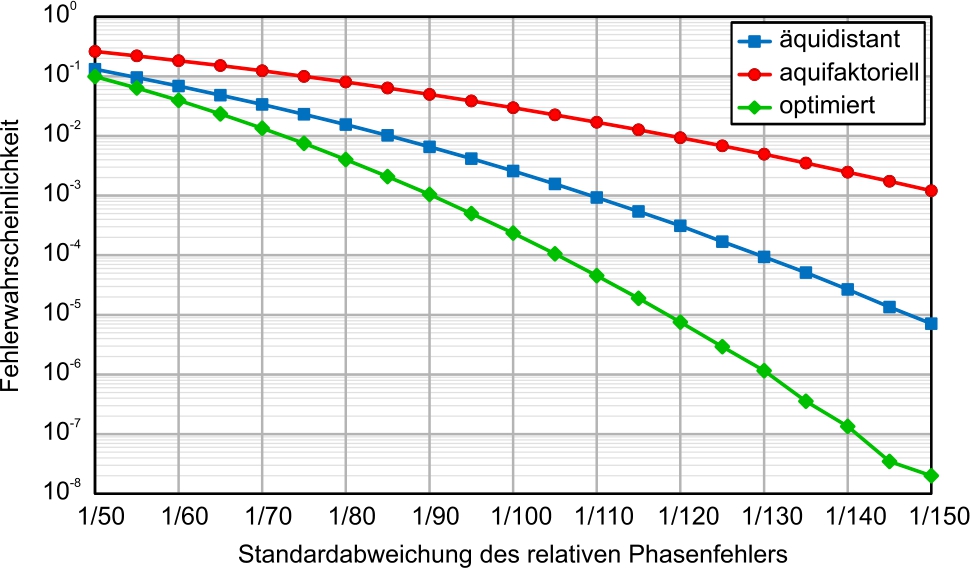
Erhöhung der Robustheit durch Optimierung des Wellenlängenverhältnisses, hier Ergebnisse einer Monte-Carlo-Simulation. Alle drei Wellenlängensets weisen eine Basiswellenlänge von
Ausgehend von den oben angestellten statistischen Betrachtungen des Entfaltungsvorgangs können neben den formulierten Optimalitätskriterien gemäß Gleichungen (34) und (38) weitere nutzbringende Schlussfolgerungen bezüglich der vorteilhaften Ausgestaltung des Entfaltungsvorgangs abgeleitet werden. So zeigen die beobachteten hohen Korrelationen innerhalb der einzelnen Stufen (vgl. Tab. 2) auf, weshalb der naheliegende Versuch einer Fehlerkorrektur durch Vergleich der vermeintlich redundanten entfalteten Phasensignale
Eine ähnliche Schlussfolgerung ist im Hinblick auf die Signale der ersten Schwebungsstufe möglich. In [3] wurde noch nahegelegt, zusätzlich zu den Schwebungssignalen
Für ein besseres Verständnis des in Abschnitt 4 aufgezeigten Fehlertyps 1 entlang der Ränder des Kodierungsbereichs sind die allgemeine Gleichung (3) sowie die für die Schwebung der zweiten Stufe gültige Gleichung (13) heranzuziehen. Da das aus der Subtraktion resultierende Rohsignal gemäß Gleichung (3) erforderlichenfalls durch Addition der Amplitude von

Exemplarisches Ergebnis der phasenrichtigen Subtraktion entlang einer Zeile des Auswertebereichs mit rauschbedingten Fehlentscheidungen.
Der Fehler vom Typ 1 beträgt auf Ebene des Schwebungssignals folglich stets
Die Abschätzung des abhängig vom vorhandenen Rauschniveau der Eingangsphasen zu verwendenden Überlappbereichs kann durch eine statistische Betrachtung ausgehend von Gleichung (13) erfolgen. Unter der Annahme gleicher relativer Unsicherheiten der drei Eingangsphasen
Für die Bestimmung des benötigten Überlappbereichs muss die Unsicherheit gemäß Gleichung (39) in Verhältnis zur Steigung des Phasensignals
Bei gegebener Schwebungswellenlänge
Für den oben exemplarisch betrachteten Fall einer Schwebungswellenlänge von
6 Minimierung der statistischen Unsicherheit der Ortskodierung
Sowohl bei der Streifenprojektion – bei welcher das zur Kodierung verwendete Streifenmuster auf das Objekt projiziert und diffus zurückgestreut wird – als auch bei der Deflektometrie – bei welcher das Streifenmuster am Prüfling reflektiert wird – hängt das von der Kamera registrierte Erscheinungsbild der Streifenmuster in hohem Maße von der Geometrie und den Rückstreueigenschaften der zu erfassenden Oberfläche ab. Insbesondere hat eine Verringerung des wahrnehmbaren Streifenkontrasts eine Erhöhung der statistischen Unsicherheit bei der Auswertung von Phasenschiebesequenzen zur Folge. In einer konkreten Messsituation stellt sich daher die Frage, bei welcher Streifenperiode die statistisch besten Ergebnisse der Ortskodierung erzielt werden können.
Für die Bestimmung der Unsicherheit der Ortskodierung sind zum einen die Unsicherheiten der Phasenmessung selbst und zum anderen die als Bezugslänge wirkende Streifenperiode maßgeblich. Zur Vorhersage des Phasenrauschens kommt nachfolgend das von Fischer et al. [11], [12] formulierte und verifizierte Phasenrauschmodell zur Anwendung, welches auf dem linearen Kamerarauschmodell der EMVA 1288 [13] aufsetzt. Hierin wird die im Verlauf einer Phasenschiebesequenz in einem Pixel beobachtbare Intensität
Dabei ist φ der zu bestimmende Phasenwinkel,
Zur Vorhersage des absoluten Phasenrauschens formuliert Fischer einen Ausdruck, welcher ausschließlich von EMVA-konformen Kamerakenngrößen sowie den während einer Phasenschiebesequenz registrierten Intensitäten abhängt. Für den hier angenommenen Sonderfall eines symmetrischen 4-Schritt Phasenschiebealgorithmus ergibt sich der Schätzwert des Phasenrauschens zu:
Bei dem darin enthaltenen Faktor K handelt es sich um die Systemverstärkung der Kamera gemäß EMVA 1288. Die Parameter
Um die so ermittelte Standardabweichung des absoluten Phasenrauschens in eine geometrische Länge zu überführen, ist die Wellenlänge im Ort mit heranzuziehen. Hierzu wird gemäß Gleichung (44) durch Normierung auf die Periode von
In Abb. 8 ist exemplarisch das Resultat einer experimentellen Bestimmung der statistisch optimalen Streifenbreite dargestellt, wobei hier eine Kamera direkt auf einen Flüssigkristallbildschirm blickt, welcher mit den Streifenmustern einer symmetrischen 4-Schritt Phasensequenz beaufschlagt wird. Als geometrische Bezugslänge wird dabei die Streifenperiode in der Einheit Bildschirmpixel angesetzt. Mit dem bekannten Pixelpitch wäre jedoch auch die direkte Angabe einer metrischen Länge möglich.
Es ist zu erkennen, dass die Phasenabweichung ausgehend von der kürzesten Wellenlänge von hier 9 Pixel zu größeren Wellenlänge hin rasch abfällt, wobei die Kurve im weiteren Verlauf stark abflacht, so dass jenseits von 25 Pixel kaum mehr eine Reduzierung des Phasenrauschens zu verzeichnen ist. Dies kann so interpretiert werden kann, dass der Streifenkontrast ab dort nahezu vollständig ausgeprägt ist. Die unter Berücksichtigung der jeweiligen Wellenlänge ermittelte Positionsabweichung hingegen fällt zu Beginn ebenso deutlich ab, erreicht dann jedoch rasch ein Minimum und steigt hin zu größeren Wellenlängen wieder an. Die minimale Abweichung der Ortskodierung ergibt sich in dieser konkreten Messanordnung demnach für eine Wellenlänge von etwa 17 Pixel.
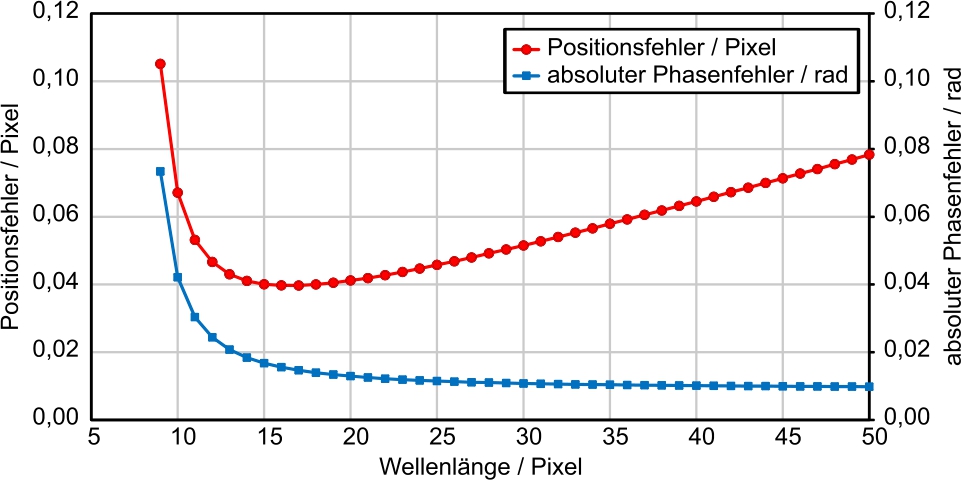
Experimentell ermittelte Minimierung der statistischen Positionsabweichung für eine gegebene Messsituation durch Bestimmung der optimalen Streifenbreite.
Aufschlussreich ist es, die von der Kamera bei den jeweiligen Wellenlängen registrierten Beleuchtungs- und Kontrastverhältnisse des Streifenmusters näher zu betrachten. In Abb. 9 sind hierzu in den oben erläuterten, von Belichtung β und Sichtbarkeit γ aufgespannten Parameterraum die zugehörigen Werte der Messreihe aus Abb. 8 eingetragen. Es ist zu erkennen, dass die Belichtung β wie zu erwarten keinerlei Abhängigkeit von der Wellenlänge zeigt, dass jedoch die Sichtbarkeit γ mit steigender Wellenlänge deutlich zunimmt. Das statistische Optimium bei einer Wellenlänge von 17 Pixel ist jedoch bemerkenswerter Weise von einer Sichtbarkeit von

Parameterraum von Belichtung und Sichtbarkeit, grüne Kreise: Verbesserung der Sichtbarkeit bei zunehmender Wellenlänge, rotes Quadrat: Sichtbarkeit mit minimaler statistischer Positionsabweichung bei Wellenlänge von 17 Pixel (vgl. Abb. 8).
7 Zusammenfassung
In dem vorliegenden Beitrag wird mit Blick auf geometrisch-optische Messverfahren mit strukturierter Beleuchtung, wie insbesondere der Streifenprojektion und der phasenmessenden Deflektometrie, eine vorteilhafte Ausführungsform des Heterodyn-Phasenschiebeverfahrens vorgestellt und hinsichtlich ihrer statistischen Eigenschaften analysiert. Im Mittelpunkt dieser Betrachtung stehen die Genese von Entfaltungsfehlern sowie deren mathematische Beschreibung. Im Ergebnis werden mathematisch fundierte Kriterien zur Bestimmung der beim Heterodynverfahren idealerweise zu verwendenden Wellenlängen formuliert und es wird aufgezeigt, dass bei Verwendung entsprechend optimierter Muster die Robustheit des Entfaltungsvorgangs gegenüber nicht optimierten Ansätzen um mehrere Größenordnungen gesteigert werden kann. Darüber hinaus wird eine auf dem linearen Kamerarauschmodell der EMVA 1288 basierende experimentelle Methodik vorgestellt, welche es ermöglicht, in einer konkreten Aufnahmesituation die im Hinblick auf die erzielbare statistische Unsicherheit der Ortskodierung optimale Basiswellenlänge zu ermitteln.
Funding source: Deutsche Forschungsgemeinschaft
Award Identifier / Grant number: Pe1402/6-1
Funding statement: Die Autoren danken der Deutschen Forschungsgemeinschaft (DFG) für die Förderung dieser Arbeit im Rahmen des Projekts Pe1402/6-1.
Über die Autoren

Marcus Petz ist seit 1999 am Institut für Produktionsmesstechnik der TU Braunschweig als wissenschaftlicher Mitarbeiter und seit seiner Promotion 2005 in der Funktion eines Oberingenieurs tätig. Seine Arbeitsschwerpunkte liegen im Bereich optische Messtechnik, insbesondere photogrammetrische Methoden zur Erfassung von Form und Formänderung, sowie auf dem Gebiet der Multisensor-Koordinatenmesstechnik.

Hanno Dierke studierte Physik an der TU Braunschweig. Nach Abschluss der Promotion im Bereich der Metallphysik ist er seit 2008 wissenschaftlicher Mitarbeiter am Institut für Produktionsmesstechnik der TU Braunschweig. Sein Arbeitsschwerpunkt hier ist die Charakterisierung optischer Messverfahren.

Rainer Tutsch studierte Physik und promovierte 1994 an der RWTH Aachen im Fach Maschinenbau. Er war Oberingenieur der Abteilung Mess- und Qualitätstechnik des Fraunhofer-Instituts für Produktionstechnologie, Aachen. Nach einer Industrietätigkeit als Entwicklungsleiter ist er seit Dezember 2000 Professor und Leiter des Instituts für Produktionsmesstechnik an der TU Braunschweig.
Literatur
1. Gorthi, S.S.; Rastogi, P.: Fringe Projection Techniques: Whither we are? In: Optics and Lasers in Engineering, Volume 48, Issue 2, 2010, pp. 133–140.10.1016/j.optlaseng.2009.09.001Search in Google Scholar
2. Knauer, M.C.: Absolute phasenmessende Deflektometrie. Dissertation, Friedrich-Alexander Universität Nürnberg-Erlangen, 2006.Search in Google Scholar
3. Petz, M.: Rasterreflexions-Photogrammetrie – Ein neues Verfahren zur geometrischen Messung spiegelnder Oberflächen. Dissertation, Technische Universität Braunschweig, 2006, Schriftenreihe des Instituts für Produktionsmesstechnik, Band 1, Aachen: Shaker, ISBN 3-8322-4944-3.Search in Google Scholar
4. Reich, C.; Ritter, R.; Thesing, J.: White light heterodyne principle for 3D-measurement. In: Proc. SPIE 3100, Sensors, Sensor Systems, and Sensor Data Processing, 1997, pp. 236–244.10.1117/12.287750Search in Google Scholar
5. Wahl, F.M.: A Coded Light Approach for Depth Map Acquisition. In: 8. DAGM-Symposium Mustererkennung, Paderborn: Springer, 1986, pp. 12–17.10.1007/978-3-642-71387-3_3Search in Google Scholar
6. Sansoni, G.; Carocci, M.; Rodella, R.: Three-dimensional vision based on a combination of gray-code and phase-shift light projection: analysis and compensation of the systematic errors. In: Applied Optics, Volume 38, 1999, pp. 6565–6573.10.1364/AO.38.006565Search in Google Scholar
7. Zuo, C.; Huang, L.; Zhang, M.; Chen, Q.; Asundi, A.: Temporal phase unwrapping algorithms for fringe projection profilometry: a comparative review. In: Optics and Lasers in Engineering, Volume 85, 2016, pp. 84–103.10.1016/j.optlaseng.2016.04.022Search in Google Scholar
8. Huntley, J.M.; Saldner, H.: Temporal phase-unwrapping algorithm for automated interferogram analysis. In: Applied Optics, Volume 32, 1993, pp. 3047–3052.10.1364/AO.32.003047Search in Google Scholar
9. Gushov, V.I.; Solodkin, Y.N.: Automatic processing of fringe patterns in integer interferometers. In: Optics and Lasers in Engineering, Volume 14, Issues 4–5, 1991, pp. 311–324.10.1016/0143-8166(91)90055-XSearch in Google Scholar
10. Towers, C.E.; Towers, D.P.; Jones, J.D.C.: Absolute fringe order calculation using optimised multi-frequency selection in full-field profilometry. In: Optics and Lasers in Engineering, Volume 43, Issue 7, 2005, pp. 788–800.10.1016/j.optlaseng.2004.08.005Search in Google Scholar
11. Fischer, M.; Petz, M.; Tutsch, R.: Vorhersage des Phasenrauschens in optischen Messsystemen mit strukturierter Beleuchtung. In: tm – Technisches Messen, Heft 79 (2012) 10, S. 451–458.10.5162/sensoren2012/3.4.2Search in Google Scholar
12. Fischer, M.; Petz, M.; Tutsch, R.: Modellbasierte Rauschvorhersage für Streifenprojektionssysteme – Ein Werkzeug zur statistischen Analyse von Auswertealgorithmen. In: tm – Technisches Messen, Heft 84 (2017) 2, S. 111–122.10.1515/teme-2016-0059Search in Google Scholar
13. European Machine Vision Association: EMVA Standard 1288 – Standard for Characterization of Image Sensors and Cameras, Release 3.1, 2016.Search in Google Scholar
© 2020 Petz et al., publiziert von De Gruyter
Dieses Werk ist lizensiert unter einer Creative Commons Namensnennung 4.0 International Lizenz.