
Numerical Analysis of Optimal Hybridization in Parallel Hybrid Electric Powertrains for Tracked Vehicles





Abstract
:1. Introduction
- Optimization of the topology, where the goal is to find the best structure, i.e., the powertrain configuration;
- Optimization of the size, i.e., the parameters of the powertrain elements for the selected topology;
- Optimization of the control system, where the goal is to find the optimal supervisory control strategy, i.e., the energy management system.
2. Materials and Methods
2.1. HETV Modeling
2.1.1. Power Demand
2.1.2. Internal Combustion Engine
2.1.3. Gearbox
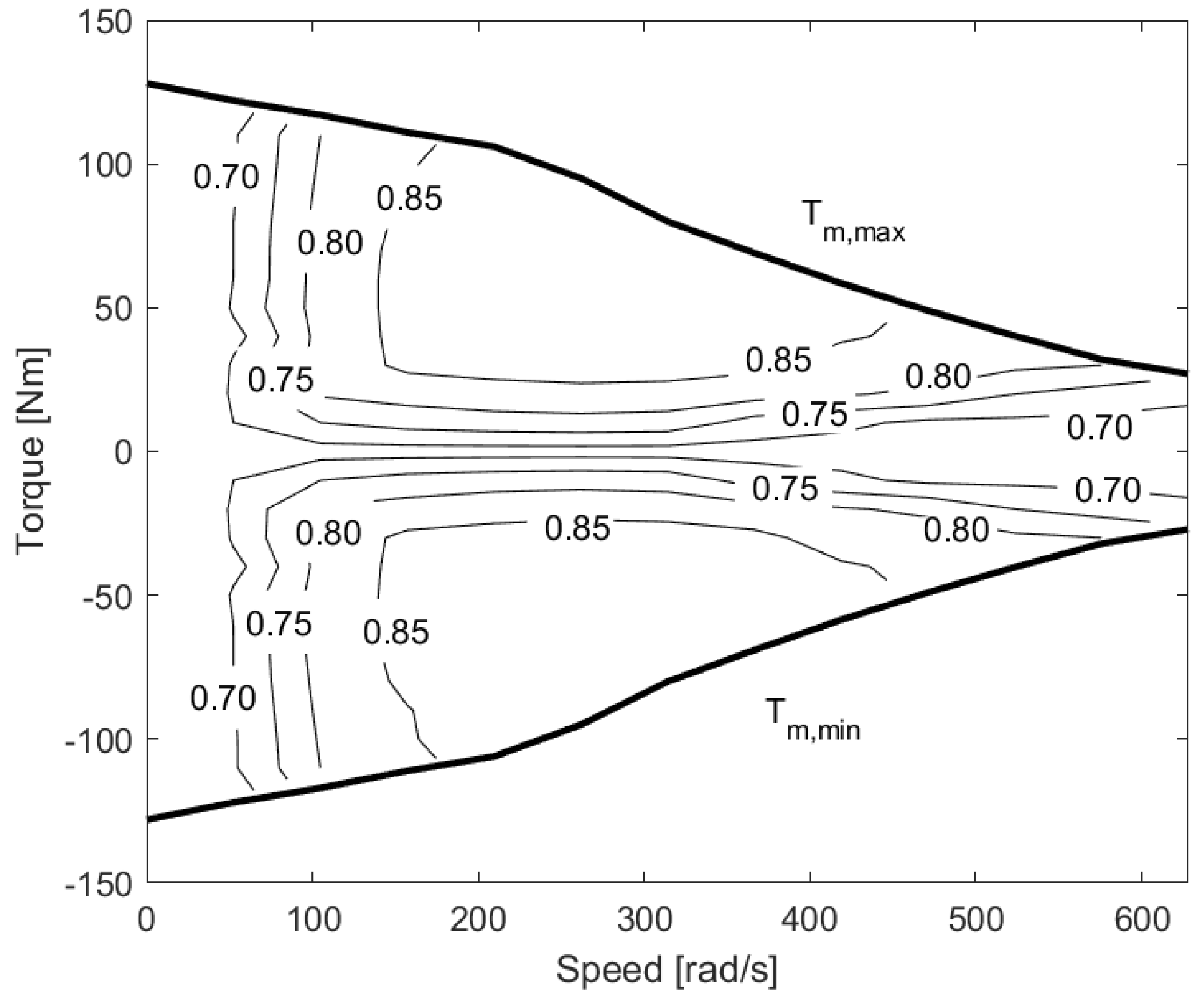
2.1.4. Electric Motor
2.1.5. Battery Pack
2.2. Dynamic Programming
2.3. Model Integration and Scaling
3. Results
Parameter Sensitivity Analysis
4. Discussion
- Engine only;
- Motor only;
- Hybrid;
- Charging;
- Regenerative braking.
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| HETV | Hybrid Electric Tracked Vehicle |
| EMT | Electromechanical Transmission |
| EMS | Energy Management Strategy |
| SOC | State of Charge |
| ICE | Internal Combustion Engine |
| HF | Hybridization Factor |
| DP | Dynamic Programming |
References
- Wong, J.Y.; Huang, W. “Wheels vs. tracks”—A fundamental evaluation from the traction perspective. J. Terramech. 2006, 43, 27–42. [Google Scholar] [CrossRef]
- Khalil, G. Challenges of hybrid electric vehicles for military applications. In Proceedings of the 2009 IEEE Vehicle Power and Propulsion Conference, Dearborn, MI, USA, 7–10 September 2009; IEEE: Piscataway, NJ, USA, 2009; pp. 1–3. [Google Scholar]
- Galvagno, E.; Rondinelli, E.; Velardocchia, M. Electro-mechanical transmission modelling for series-hybrid tracked tanks. Int. J. Heavy Veh. Syst. 2012, 19, 256–280. [Google Scholar] [CrossRef]
- Randive, V.; Subramanian, S.C.; Thondiyath, A. Design and analysis of a hybrid electric powertrain for military tracked vehicles. Energy 2021, 229, 120768. [Google Scholar] [CrossRef]
- Randive, V.; Subramanian, S.C.; Thondiyath, A. Component sizing of single and dual drive series hybrid electric powertrain for military tracked vehicles. In Proceedings of the 2019 IEEE Vehicle Power and Propulsion Conference (VPPC), Hanoi, Vietnam, 14–17 October 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 1–6. [Google Scholar]
- Zou, Y.; Sun, F.; Hu, X.; Guzzella, L.; Peng, H. Combined optimal sizing and control for a hybrid tracked vehicle. Energies 2012, 5, 4697–4710. [Google Scholar] [CrossRef]
- Qin, Z.; Luo, Y.; Zhuang, W.; Pan, Z.; Li, K.; Peng, H. Simultaneous optimization of topology, control and size for multi-mode hybrid tracked vehicles. Appl. Energy 2018, 212, 1627–1641. [Google Scholar] [CrossRef]
- Zhang, W.; Wang, J.; Du, S.; Ma, H.; Zhao, W.; Li, H. Energy management strategies for hybrid construction machinery: Evolution, classification, comparison and future trends. Energies 2019, 12, 2024. [Google Scholar] [CrossRef]
- Milićević, S.V.; Blagojević, I.A. Component sizing and energy management for a series hybrid electric tracked vehicle. Vojnoteh. Glas. Tech. Cour. 2022, 70, 877–896. [Google Scholar] [CrossRef]
- Du, G.; Zou, Y.; Zhang, X.; Kong, Z.; Wu, J.; He, D. Intelligent energy management for hybrid electric tracked vehicles using online reinforcement learning. Appl. Energy 2019, 251, 113388. [Google Scholar] [CrossRef]
- Han, R.; Lian, R.; He, H.; Han, X. Continuous reinforcement learning-based energy management strategy for hybrid electric-tracked vehicles. IEEE J. Emerg. Sel. Top. Power Electron. 2021, 11, 19–31. [Google Scholar] [CrossRef]
- Han, X.; He, H.; Wu, J.; Peng, J.; Li, Y. Energy management based on reinforcement learning with double deep Q-learning for a hybrid electric tracked vehicle. Appl. Energy 2019, 254, 113708. [Google Scholar] [CrossRef]
- Liu, T.; Zou, Y.; Liu, D.; Sun, F. Reinforcement learning–based energy management strategy for a hybrid electric tracked vehicle. Energies 2015, 8, 7243–7260. [Google Scholar] [CrossRef]
- Su, Q.; Huang, R.; He, H. Heterogeneous multi-agent deep reinforcement learning for eco-driving of hybrid electric tracked vehicles: A heuristic training framework. J. Power Sources 2024, 601, 234292. [Google Scholar] [CrossRef]
- Silvas, E.; Hofman, T.; Murgovski, N.; Etman, L.P.; Steinbuch, M. Review of optimization strategies for system-level design in hybrid electric vehicles. IEEE Trans. Veh. Technol. 2016, 66, 57–70. [Google Scholar] [CrossRef]
- Guzzella, L.; Sciarretta, A. Vehicle Propulsion Systems; Springer: Berlin/Heidelberg, Germany, 2007; Volume 1. [Google Scholar]
- Zou, Y.; Li, J.; Hu, X.; Chamaillard, Y. Modeling and Control of Hybrid Propulsion System for Ground Vehicles; Springer: Berlin/Heidelberg, Germany, 2018. [Google Scholar]
- Milićević, S.; Muždeka, S. Modelling and performance analysis of the BVP M-80A hybrid drive. Vojnoteh. Glas. Tech. Cour. 2021, 69, 64–87. [Google Scholar] [CrossRef]
- Milićević, S.V.; Blagojević, I.A.; Muždeka, S.R. Advanced rule-based energy management for better fuel economy of hybrid electric tracked vehicle. FME Trans. 2021, 49, 711–718. [Google Scholar] [CrossRef]
- Katrasnik, T.; Trenc, F.; Opresnik, S.R. Analysis of energy conversion efficiency in parallel and series hybrid powertrains. IEEE Trans. Veh. Technol. 2007, 56, 3649–3659. [Google Scholar] [CrossRef]
- Banjac, T.; Trenc, F.; Katrašnik, T. Energy conversion efficiency of hybrid electric heavy-duty vehicles operating according to diverse drive cycles. Energy Convers. Manag. 2009, 50, 2865–2878. [Google Scholar] [CrossRef]
- Zhang, B.; Guo, S.; Lv, Q.; Zhang, X.; Ouyang, M.; Teng, L. Quantitative analysis of the energy saving mechanism of a hybrid electric tracked vehicle by an analytical method. Energy Convers. Manag. 2021, 237, 114067. [Google Scholar] [CrossRef]
- Zhuang, W.; Li, S.; Zhang, X.; Kum, D.; Song, Z.; Yin, G.; Ju, F. A survey of powertrain configuration studies on hybrid electric vehicles. Appl. Energy 2020, 262, 114553. [Google Scholar] [CrossRef]
- Li, X.; Williamson, S.S. Comparative investigation of series and parallel hybrid electric vehicle (HEV) efficiencies based on comprehensive parametric analysis. In Proceedings of the 2007 IEEE Vehicle Power and Propulsion Conference, Arlington, TX, USA, 9–12 September 2007; IEEE: Piscataway, NJ, USA, 2007; pp. 499–505. [Google Scholar]
- Huang, Y.; Wang, H.; Khajepour, A.; Li, B.; Ji, J.; Zhao, K.; Hu, C. A review of power management strategies and component sizing methods for hybrid vehicles. Renew. Sustain. Energy Rev. 2018, 96, 132–144. [Google Scholar] [CrossRef]
- Xu, L.; Mueller, C.D.; Li, J.; Ouyang, M.; Hu, Z. Multi-objective component sizing based on optimal energy management strategy of fuel cell electric vehicles. Appl. Energy 2015, 157, 664–674. [Google Scholar] [CrossRef]
- Wong, J.Y. Theory of Ground Vehicles; John Wiley & Sons: Hoboken, NJ, USA, 2022. [Google Scholar]
- Rizzo, D.M. Military Vehicle Optimization and Control; Michigan Technological University: Houghton, MI, USA, 2014. [Google Scholar]
- Milićević, S.V.; Blagojević, I.A. Theoretical model of high-speed tracked vehicle general motion. FME Trans. 2023, 51, 449–456. [Google Scholar] [CrossRef]
- Urlaub, A. Verbrennungsmotoren: Grundlagen, Verfahrenstheorie, Konstruktion; Springer: Berlin/Heidelberg, Germany, 2013. [Google Scholar]
- Sorrentino, M.; Mauramati, F.; Arsie, I.; Cricchio, A.; Pianese, C.; Nesci, W. Application of Willans Line Method for Internal Combustion Engines Scalability towards the Design and Optimization of Eco-Innovation Solutions; Technical Report, SAE Technical Paper; SAE: Warrendale, PA, USA, 2015. [Google Scholar]
- Suijs, W.; Verhelst, S. Scaling Performance Parameters of Reciprocating Engines for Sustainable Energy System Optimization Modelling. Energies 2023, 16, 7497. [Google Scholar] [CrossRef]
- Rizzoni, G.; Guzzella, L.; Baumann, B.M. Unified modeling of hybrid electric vehicle drivetrains. IEEE/ASME Trans. Mechatronics 1999, 4, 246–257. [Google Scholar] [CrossRef]
- Milićević, S.V.; Blagojević, I.A. Optimization of gear ratios and gear-shifting strategy for enhanced efficiency in tracked vehicles. Vojnoteh. Glas. 2023, 71, 1028–1047. [Google Scholar] [CrossRef]
- Markel, T.; Brooker, A.; Hendricks, T.; Johnson, V.; Kelly, K.; Kramer, B.; O’Keefe, M.; Sprik, S.; Wipke, K. ADVISOR: A systems analysis tool for advanced vehicle modeling. J. Power Sources 2002, 110, 255–266. [Google Scholar] [CrossRef]
- Tamilselvi, S.; Gunasundari, S.; Karuppiah, N.; Razak, R.K.A.; Madhusudan, S.; Nagarajan, V.M.; Sathish, T.; Shamim, M.Z.M.; Saleel, C.A.; Afzal, A. A review on battery modelling techniques. Sustainability 2021, 13, 10042. [Google Scholar] [CrossRef]
- Malikopoulos, A.A. Impact of component sizing in plug-in hybrid electric vehicles for energy resource and greenhouse emissions reduction. J. Energy Resour. Technol. 2013, 135, 041201. [Google Scholar] [CrossRef]
- Azad, N.L.; Mozaffari, A.; Vajedi, M.; Masoudi, Y. Chaos oscillator differential search combined with Pontryagin’s minimum principle for simultaneous power management and component sizing of PHEVs. Optim. Eng. 2016, 17, 727–760. [Google Scholar] [CrossRef]
- Kong, Y.; Xu, N.; Liu, Q.; Sui, Y.; Yue, F. A data-driven energy management method for parallel PHEVs based on action dependent heuristic dynamic programming (ADHDP) model. Energy 2023, 265, 126306. [Google Scholar] [CrossRef]
- Ma, Z.; Luan, Y.; Zhang, F.; Xie, S.; Coskun, S. A data-driven energy management strategy for plug-in hybrid electric buses considering vehicle mass uncertainty. J. Energy Storage 2024, 77, 109963. [Google Scholar] [CrossRef]
- Bellman, R. Dynamic programming. Science 1966, 153, 34–37. [Google Scholar] [CrossRef] [PubMed]
- Sundstrom, O.; Guzzella, L. A generic dynamic programming Matlab function. In Proceedings of the 2009 IEEE Control Applications,(CCA) & Intelligent Control, (ISIC), St. Petersburg, Russia, 8–10 July 2009; IEEE: Piscataway, NJ, USA, 2009; pp. 1625–1630. [Google Scholar]
- Sundström, O.; Guzzella, L.; Soltic, P. Optimal hybridization in two parallel hybrid electric vehicles using dynamic programming. IFAC Proc. Vol. 2008, 41, 4642–4647. [Google Scholar] [CrossRef]
- Lin, C.C.; Peng, H.; Grizzle, J.W.; Kang, J.M. Power management strategy for a parallel hybrid electric truck. IEEE Trans. Control Syst. Technol. 2003, 11, 839–849. [Google Scholar]
- Liu, T.; Tan, K.; Zhu, W.; Feng, L. Computationally Efficient Energy Management for a Parallel Hybrid Electric Vehicle Using Adaptive Dynamic Programming. IEEE Trans. Intell. Veh. 2023, 9, 4085–4099. [Google Scholar] [CrossRef]
- Li, G.; Görges, D. Fuel-efficient gear shift and power split strategy for parallel HEVs based on heuristic dynamic programming and neural networks. IEEE Trans. Veh. Technol. 2019, 68, 9519–9528. [Google Scholar] [CrossRef]
- Lukic, S.M.; Emadi, A. Effects of drivetrain hybridization on fuel economy and dynamic performance of parallel hybrid electric vehicles. IEEE Trans. Veh. Technol. 2004, 53, 385–389. [Google Scholar] [CrossRef]
- Madhusudhanan, A.K.; Na, X.; Cebon, D. A computationally efficient framework for modelling energy consumption of ICE and electric vehicles. Energies 2021, 14, 2031. [Google Scholar] [CrossRef]
- Grunditz, E.; Thiringer, T. Modelling and Scaling Procedure of a Vehicle Electric Drive System; Report; Chalmers University of Technology: Göteborg, Sweden, 2017; p. 19. Available online: https://core.ac.uk/download/pdf/141718197.pdf (accessed on 8 June 2024).
- Somayajula, D.; Meintz, A.; Ferdowsi, M. Study on the effects of battery capacity on the performance of hybrid electric vehicles. In Proceedings of the 2008 IEEE Vehicle Power and Propulsion Conference, Harbin, China, 3–5 September 2008; IEEE: Piscataway, NJ, USA, 2008; pp. 1–5. [Google Scholar]
- Benajes, J.; Novella, R.; Pastor, J.; Hernández-López, A.; Duverger, T. A computational analysis of the impact of bore-to-stroke ratio on emissions and efficiency of a HSDI engine. Appl. Energy 2017, 205, 903–910. [Google Scholar] [CrossRef]
- Hoag, K.L.; Mangold, B.; Alger, T.; Abidin, Z.; Wray, C.; Walls, M.; Chadwell, C. A study isolating the effect of bore-to-stroke ratio on gasoline engine combustion chamber development. SAE Int. J. Engines 2016, 9, 2022–2029. [Google Scholar] [CrossRef]
- Milićević, S.V.; Blagojević, I.A. Powertrain Optimization Methodology Based on Scalable Modeling. In Proceedings of the 2023 31st Telecommunications Forum (TELFOR), Belgrade, Serbia, 21–22 November 2023; IEEE: Piscataway, NJ, USA, 2023; pp. 1–4. [Google Scholar]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Vehicle mass | 13,850 kg |
| Track contact length | 3.3 m |
| Vehicle frontal area | 5.5 |
| Sprocket radius | 0.26 m |
| Vehicle tread | 2.5 m |
| Planetary gear ratio | 2.546 kg/m3 |
| Gearbox ratios | ; ; ; ; |
| Rolling resistance coefficient | 0.07 |
| Air density | 1.2258 kg/m3 |
| Drag coefficient | 1.1 |
| Powertrain Component | Parameter Value |
|---|---|
| ICE | kW, Nm, rad/s, |
| Electric motors | kW, Nm, rad/s |
| Battery | Ah, A |
| Drive Cycle | Hybridization Factor |
|---|---|
| Soft terrain | 0.27 |
| Hard terrain | 0.59 |
| Complete drive cycle | 0.48 |
| Drive Cycle | Energy Available for Recuperation |
|---|---|
| Soft terrain | kW/km |
| Hard terrain | kW/km |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Milićević, S.; Blagojević, I.; Milojević, S.; Bukvić, M.; Stojanović, B. Numerical Analysis of Optimal Hybridization in Parallel Hybrid Electric Powertrains for Tracked Vehicles. Energies 2024, 17, 3531. https://doi.org/10.3390/en17143531
Milićević S, Blagojević I, Milojević S, Bukvić M, Stojanović B. Numerical Analysis of Optimal Hybridization in Parallel Hybrid Electric Powertrains for Tracked Vehicles. Energies. 2024; 17(14):3531. https://doi.org/10.3390/en17143531
Chicago/Turabian StyleMilićević, Stefan, Ivan Blagojević, Saša Milojević, Milan Bukvić, and Blaža Stojanović. 2024. "Numerical Analysis of Optimal Hybridization in Parallel Hybrid Electric Powertrains for Tracked Vehicles" Energies 17, no. 14: 3531. https://doi.org/10.3390/en17143531