Morfologia
Morfologia
Descargar como pdf o txt
También podría gustarte
- Tema 5 Cinematica InversaDocumento17 páginasTema 5 Cinematica InversaPEDRO ALEJANDRO MENDOZAAún no hay calificaciones
- Manual Sistema Direccion Toyota PDFDocumento117 páginasManual Sistema Direccion Toyota PDFdaniel100% (3)
- Clase 1 - 1Documento74 páginasClase 1 - 1Jorge HinojosaAún no hay calificaciones
- Robótica Parte3 CompletaDocumento52 páginasRobótica Parte3 CompletanekokanamealexisAún no hay calificaciones
- (Libro - Robótica) Plc-Automatas Cinematica (Automatizacion y Robotica)Documento24 páginas(Libro - Robótica) Plc-Automatas Cinematica (Automatizacion y Robotica)Eli Flor MayAún no hay calificaciones
- Cinematica Del RobotDocumento23 páginasCinematica Del RobotLuis Aguilar OrellanaAún no hay calificaciones
- 6ta Unidad BDocumento77 páginas6ta Unidad BanimigoAún no hay calificaciones
- Modelado Geométrico y Cinemático Del RobotDocumento33 páginasModelado Geométrico y Cinemático Del RobotJc RzAún no hay calificaciones
- Informe Practica de Campo Robot Scara N°9Documento4 páginasInforme Practica de Campo Robot Scara N°9abelaquino299Aún no hay calificaciones
- 6 Cinematica DiferencialDocumento69 páginas6 Cinematica DiferencialJessica Maribel Ballinas AlcázarAún no hay calificaciones
- Cinemática Directa de ManipuladoresDocumento88 páginasCinemática Directa de ManipuladoresEduardo Vicente Melchi LagunesAún no hay calificaciones
- webConferenciaFase3 Robotica-16-01Documento46 páginaswebConferenciaFase3 Robotica-16-01terramorteAún no hay calificaciones
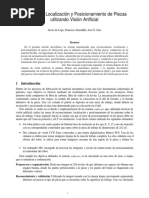
- Sistema de Localización y Posicionamiento de Piezas Utilizando Visión ArtificialDocumento8 páginasSistema de Localización y Posicionamiento de Piezas Utilizando Visión Artificialjose mercadoAún no hay calificaciones
- Tema02 Cinematica Directa de ManipuladoresDocumento88 páginasTema02 Cinematica Directa de ManipuladoresJoel Eduardo Sánchez MedinaAún no hay calificaciones
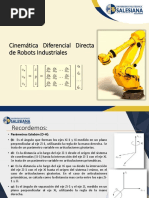
- Cinematica Diferencial Directa de Robots PDFDocumento44 páginasCinematica Diferencial Directa de Robots PDFkevinAún no hay calificaciones
- Taller Corte 1 - Juan Pablo GarciaDocumento3 páginasTaller Corte 1 - Juan Pablo GarciaJuan Pablo GarciaAún no hay calificaciones
- Tema 4 JacobianoDocumento16 páginasTema 4 Jacobianovjvargas88Aún no hay calificaciones
- Informe 5 - Arias Vargas Karen Rivera Duenas Jose y Zevallos Zegarra RocioDocumento28 páginasInforme 5 - Arias Vargas Karen Rivera Duenas Jose y Zevallos Zegarra RocioJose OlazabalAún no hay calificaciones
- Informe Resistencia de Materiales Momento de Inercia en Ejes Girados y Principales de Áreas Simples y Compuestas y Circulo de MorhDocumento21 páginasInforme Resistencia de Materiales Momento de Inercia en Ejes Girados y Principales de Áreas Simples y Compuestas y Circulo de MorhDIEGO SILVAAún no hay calificaciones
- Tema 6 Cinematica Modelo DiferencialDocumento16 páginasTema 6 Cinematica Modelo DiferencialMaría Lizeth Mandón GAún no hay calificaciones
- Polar DHDocumento10 páginasPolar DHKEVIN AARÓN VIVEROS CHAVESAún no hay calificaciones
- Tema06 Cinematica Diferencial de ManipuladoresDocumento49 páginasTema06 Cinematica Diferencial de ManipuladoresSebastian Miguel Cáceres HuamánAún no hay calificaciones
- 06 Evaluación Problema 2366 ResoluciónDocumento10 páginas06 Evaluación Problema 2366 ResoluciónJuan Pablo ProañoAún no hay calificaciones
- Semana 13Documento17 páginasSemana 13FIORELLA MAGALY QUINTA ESTRADAAún no hay calificaciones
- Guia 4Documento9 páginasGuia 4José Antonio Rodríguez CanoAún no hay calificaciones
- Metodo RSIDocumento29 páginasMetodo RSIOscar Segovia AlcantaraAún no hay calificaciones
- Grados de LibertadDocumento51 páginasGrados de Libertadsebas13mgAún no hay calificaciones
- Act DKDocumento2 páginasAct DKgomez.adrian.qmatutinoAún no hay calificaciones
- 0 Prog Diseño 4 Oct 2021Documento18 páginas0 Prog Diseño 4 Oct 2021Jairo ValenzuelaAún no hay calificaciones
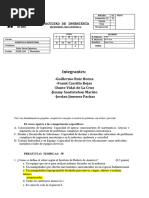
- Examen - T2 - 2024 - Robotica IndustrialDocumento30 páginasExamen - T2 - 2024 - Robotica Industrialabelaquino299Aún no hay calificaciones
- Tema06 Cinematica Diferencial de ManipuladoresDocumento49 páginasTema06 Cinematica Diferencial de ManipuladoresjoinaAún no hay calificaciones
- Informe 1 Robo2 FinalDocumento24 páginasInforme 1 Robo2 FinalWILLIAM BERRIOS ROJASAún no hay calificaciones
- PA Refundido2023Documento3 páginasPA Refundido2023Moises MoralesAún no hay calificaciones
- Articulo ScaraDocumento4 páginasArticulo ScaraShiryu DE AriesAún no hay calificaciones
- 100000I29N-GUIA N°1-LABCOMPC01-TRANSFORMACIONES BÁSICAS A NIVEL ESPACIALDocumento5 páginas100000I29N-GUIA N°1-LABCOMPC01-TRANSFORMACIONES BÁSICAS A NIVEL ESPACIALGermain Abel Perez GutierrezAún no hay calificaciones
- Clase4 Tema2.Transformaciones EspacialesDocumento64 páginasClase4 Tema2.Transformaciones EspacialesKaren July Riera GAún no hay calificaciones
- Tema 4 Cinematica DirectaDocumento27 páginasTema 4 Cinematica DirectaJoseEduardoBautistaAcevedo0% (1)
- Semana 1Documento22 páginasSemana 1LokitoPaTlpvRomeroHernandezAún no hay calificaciones
- 7.cinemática Diferencial Directa de Robots IndustrialesDocumento35 páginas7.cinemática Diferencial Directa de Robots IndustrialesLeandro OrellanaAún no hay calificaciones
- axonometrias-autocadDocumento15 páginasaxonometrias-autocadsolhuevooAún no hay calificaciones
- Cinematica Del RobotDocumento33 páginasCinematica Del RobotMaria Dolores Estrella Lopez100% (1)
- Examen 2 2023-2Documento2 páginasExamen 2 2023-2Jhoselin CoralAún no hay calificaciones
- Tema 2 Análisis de pavimentos flexiblesDocumento81 páginasTema 2 Análisis de pavimentos flexiblesisaaccubillosolanoAún no hay calificaciones
- 06 Momentos y Productos de Inercia PDFDocumento30 páginas06 Momentos y Productos de Inercia PDFHenry Arevalo AlvarezAún no hay calificaciones
- OPEN PIT DESIGN - EspañolDocumento24 páginasOPEN PIT DESIGN - EspañolJhon Andrés Toapanta CastellanosAún no hay calificaciones
- Robotica I - Cinematica 1 - Met Geo y MTH - v2024Documento8 páginasRobotica I - Cinematica 1 - Met Geo y MTH - v2024ElPanda 86Aún no hay calificaciones
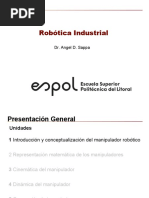
- Robotica Industrial 2 2014Documento49 páginasRobotica Industrial 2 2014Braulio ValdesAún no hay calificaciones
- Robotica Cinematica InversaDocumento16 páginasRobotica Cinematica InversaAna Busto100% (1)
- Examen Dibujo Técnico II de Canarias (Ordinaria de 2017) (WWW - Examenesdepau.com)Documento4 páginasExamen Dibujo Técnico II de Canarias (Ordinaria de 2017) (WWW - Examenesdepau.com)jasaara29Aún no hay calificaciones
- Robótica IndustrialDocumento32 páginasRobótica IndustrialDaniel Humberto GuyAún no hay calificaciones
- Distancia Entre PuntosDocumento8 páginasDistancia Entre PuntosJordan CaicedoAún no hay calificaciones
- Análisis Cinemático Del Mecanismo de Retorno Rapid 240831 205454Documento14 páginasAnálisis Cinemático Del Mecanismo de Retorno Rapid 240831 205454LUIS DAVID ZU�IGA SOLISAún no hay calificaciones
- Robótica: enfoque computacional: Transformaciones espaciales, planificación de trayectorias, cinemática, dinámica y control de robotsDe EverandRobótica: enfoque computacional: Transformaciones espaciales, planificación de trayectorias, cinemática, dinámica y control de robotsAún no hay calificaciones
- Lecciones de meteorología dinámica y modelamiento atmosféricoDe EverandLecciones de meteorología dinámica y modelamiento atmosféricoAún no hay calificaciones
- Cálculo avanzado: Cálculo en varias variables teoría, problemas propuestos y resueltos, utilización de MathematicaDe EverandCálculo avanzado: Cálculo en varias variables teoría, problemas propuestos y resueltos, utilización de MathematicaAún no hay calificaciones
- Kit Generador ElectricoDocumento6 páginasKit Generador ElectricoJuan CuentasAún no hay calificaciones
- Proteccion de Edif Peruanos Por Aislamiento y DisipaciónDocumento96 páginasProteccion de Edif Peruanos Por Aislamiento y Disipaciónruben_david_aAún no hay calificaciones
- Unidad 2 Láminas MetálicasDocumento8 páginasUnidad 2 Láminas MetálicasMiguel Angel Vilca AdcoAún no hay calificaciones
- Herramienta para El Diseño y Cálculo de Sistemas deDocumento148 páginasHerramienta para El Diseño y Cálculo de Sistemas deangelAún no hay calificaciones
- C001-Galiper-Dg-021 Eni OrfDocumento14 páginasC001-Galiper-Dg-021 Eni OrfRigel Ruiz AlvaradoAún no hay calificaciones
- Seminario I FQ GasesDocumento7 páginasSeminario I FQ GasesJulio TiradoAún no hay calificaciones
- Servo Válvulas, Servomotores AcDocumento14 páginasServo Válvulas, Servomotores AcNatalia SanchezAún no hay calificaciones
- Proceso Variables Entradas Salidas: MoliendaDocumento7 páginasProceso Variables Entradas Salidas: MoliendaFrancisco Pinto MaldonadoAún no hay calificaciones
- Manual Bomba Autocebante Eje Libre V.e.10 11Documento12 páginasManual Bomba Autocebante Eje Libre V.e.10 11MaríaFernandaRivadeneyraAún no hay calificaciones
- Memoria de Cálculo - Ie 20790 Puerto SupeDocumento13 páginasMemoria de Cálculo - Ie 20790 Puerto SupeCARLOS ENRIQUE PELÁEZ QUEZADAAún no hay calificaciones
- Correccion Tercer Examen Parcial Termodinamica de Los Procesos Quimicos IIDocumento4 páginasCorreccion Tercer Examen Parcial Termodinamica de Los Procesos Quimicos IIFrank Asto PocomuchaAún no hay calificaciones
- Informe Practicas MecanicasDocumento5 páginasInforme Practicas MecanicasSEBASTIAN O BRIEN GRAJALESAún no hay calificaciones
- Kymco Bet&win 250Documento129 páginasKymco Bet&win 250Luis Emilio Rojas100% (1)
- INFORMEDocumento142 páginasINFORMELindsay AshleyAún no hay calificaciones
- Accesorios de Caños, Curvas, Cuplas PDFDocumento32 páginasAccesorios de Caños, Curvas, Cuplas PDFgabrielvictor19Aún no hay calificaciones
- Catálogo MipersaDocumento12 páginasCatálogo MipersaJaime Fernando Leon TerrazosAún no hay calificaciones
- Taller Extra Amb.Documento2 páginasTaller Extra Amb.Marce MendietaAún no hay calificaciones
- ViscosidadDocumento8 páginasViscosidadalejandra pachecoAún no hay calificaciones
- Informe 3 FinalDocumento24 páginasInforme 3 FinalPaola RosalesAún no hay calificaciones
- Catalogo Sanitario Famiq 2017Documento104 páginasCatalogo Sanitario Famiq 2017Luis Rodrigo SanchezAún no hay calificaciones
- Examen Flujo PotencialDocumento2 páginasExamen Flujo PotencialJOSEPH FRANKLIN SOLORZANO BRUNOAún no hay calificaciones
- Ejercicio Aldana 714 Robert MottDocumento21 páginasEjercicio Aldana 714 Robert Mottmarinoford56Aún no hay calificaciones
- Problema 42 de SoteloDocumento3 páginasProblema 42 de SoteloAugusto SardónAún no hay calificaciones
- Unidad IiiDocumento10 páginasUnidad IiiLautaro Luna PinterAún no hay calificaciones
- Diseño de Muro de Contención en Voladizo + Sobre Carga Viva + SismoDocumento57 páginasDiseño de Muro de Contención en Voladizo + Sobre Carga Viva + SismoJose De Jesus HernandezAún no hay calificaciones
- CALDERASDocumento33 páginasCALDERASJulio GarcíaAún no hay calificaciones
- Lab #4 Termodinamica PDFDocumento4 páginasLab #4 Termodinamica PDFIvan Cal VilAún no hay calificaciones
- Manual Elec. TAD734GE PDFDocumento180 páginasManual Elec. TAD734GE PDFalexis cruz100% (6)
- Maquinas Utilizadas para Estriado InternoDocumento4 páginasMaquinas Utilizadas para Estriado InternoKeneth Batres0% (1)