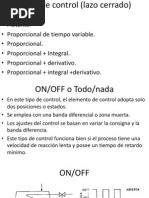
Proyecto de Control de Velocidad de Un Motor en CD
Proyecto de Control de Velocidad de Un Motor en CD
Descargar como docx, pdf o txt
También podría gustarte
- Problemas Resueltos de Maquinas Electricas Transformadores Monofasicos y TrifasicosDocumento5 páginasProblemas Resueltos de Maquinas Electricas Transformadores Monofasicos y TrifasicosSergio KijaszkoAún no hay calificaciones
- 7.analisis en Estado Estable SenoidalDocumento5 páginas7.analisis en Estado Estable SenoidalMiguel Angel Yescas BarbosaAún no hay calificaciones
- Esfuerzos Estáticos T Dinámicos en Elem MecDocumento27 páginasEsfuerzos Estáticos T Dinámicos en Elem MecmmlingAún no hay calificaciones
- Problemario Meta 3.21Documento6 páginasProblemario Meta 3.21RichiyRamirezGarciaAún no hay calificaciones
- LAB1 - Control de Posición Angular de Un Motor DCDocumento5 páginasLAB1 - Control de Posición Angular de Un Motor DCJorge Mideros ArboledaAún no hay calificaciones
- Introducción A Las Instalaciones y Sistemas EléctricosDocumento52 páginasIntroducción A Las Instalaciones y Sistemas EléctricosDarío GarcíaAún no hay calificaciones
- Prueba 2Documento50 páginasPrueba 2gisellescaAún no hay calificaciones
- Fuerza de Atracción de Un ElectroimánDocumento4 páginasFuerza de Atracción de Un ElectroimánAlexiis RualesAún no hay calificaciones
- lm2907 2Documento4 páginaslm2907 2Christian Josef Ugarte GaliciaAún no hay calificaciones
- Mecanismo de Válvulas en Motores de Combustión InternaDocumento7 páginasMecanismo de Válvulas en Motores de Combustión InternaByron Monterroza100% (1)
- AcoplamientosDocumento43 páginasAcoplamientosErik Villegas100% (1)
- Modelo Matematico de AmortiguadorDocumento9 páginasModelo Matematico de AmortiguadorLenny Rayssa Huayllas CalaniAún no hay calificaciones
- Transistores Electrotecnia PDFDocumento32 páginasTransistores Electrotecnia PDFguille881Aún no hay calificaciones
- Capacimetro Con Pic16f877aDocumento17 páginasCapacimetro Con Pic16f877aAns Shel Cardenas YllanesAún no hay calificaciones
- Control de Trayectoria PDDocumento14 páginasControl de Trayectoria PDEduardo PastorAún no hay calificaciones
- Muestreo de Señal Analógica. Arduino DueDocumento4 páginasMuestreo de Señal Analógica. Arduino DueAit A Eit0% (1)
- Circuito de Excitacion Del Transistor BJTDocumento11 páginasCircuito de Excitacion Del Transistor BJTCris StewardAún no hay calificaciones
- Vibraciones de Un Sistema de Un Grado de LibertadDocumento8 páginasVibraciones de Un Sistema de Un Grado de LibertadNAPOLE�N MARCIAL RAMOS100% (1)
- Protocolos de Comunicación Spi Usb.Documento30 páginasProtocolos de Comunicación Spi Usb.Ramírez ManuelAún no hay calificaciones
- Circuito Integrado 555Documento6 páginasCircuito Integrado 555CiroAún no hay calificaciones
- Examen Final MotoresDocumento4 páginasExamen Final MotoresAlvaro Guerrero ApolayaAún no hay calificaciones
- Informe Figuras de LissajousDocumento11 páginasInforme Figuras de LissajoussergioAún no hay calificaciones
- El Calibrador y Sus PartesDocumento22 páginasEl Calibrador y Sus PartesCarlos MamaniAún no hay calificaciones
- Tarea 5.2Documento8 páginasTarea 5.2FernandoLopezAún no hay calificaciones
- Control Sesion 2Documento220 páginasControl Sesion 2ed100% (1)
- Freno de PronyDocumento3 páginasFreno de PronyRuda JoseAún no hay calificaciones
- Signals and Systems Haykiu PDFDocumento756 páginasSignals and Systems Haykiu PDFInto The MazeAún no hay calificaciones
- Marco TeóricoDocumento3 páginasMarco TeóricoYossep Manuel Orozco MartinezAún no hay calificaciones
- Problemas de Maquinas ElectricasDocumento5 páginasProblemas de Maquinas ElectricasMiguel AngelAún no hay calificaciones
- Curso de Dinámica AplicadaDocumento9 páginasCurso de Dinámica Aplicadaconmec.crplAún no hay calificaciones
- Informe de Fuente VariableDocumento14 páginasInforme de Fuente VariableSergio Avila100% (1)
- Manual para Sistema de Seguridad Casero Con Cerradura Solenoide y Arduino UNODocumento48 páginasManual para Sistema de Seguridad Casero Con Cerradura Solenoide y Arduino UNOChristopher MoranAún no hay calificaciones
- Fuente Simétrica Regulada VariableDocumento6 páginasFuente Simétrica Regulada VariableGianmarco PeñaAún no hay calificaciones
- Laboratorio de Electrónica Analógica 1Documento3 páginasLaboratorio de Electrónica Analógica 1Ifran SierraAún no hay calificaciones
- Amplificadores RealimentadosDocumento16 páginasAmplificadores RealimentadosJorge Luis SorucoAún no hay calificaciones
- Clase 11 PROGRAMACION DEL PIC17F877A - Interrupciones, TimersDocumento17 páginasClase 11 PROGRAMACION DEL PIC17F877A - Interrupciones, TimersMiltonAún no hay calificaciones
- CalculosDocumento48 páginasCalculosCarlos JaramilloAún no hay calificaciones
- Circuito Puente H PDFDocumento6 páginasCircuito Puente H PDFGeo M. PoloAún no hay calificaciones
- Electrónica de Potencia AplicadaDocumento35 páginasElectrónica de Potencia AplicadaMarco Vazquez0% (1)
- R.A de Mael100%Documento55 páginasR.A de Mael100%Isacc Galvan LiraAún no hay calificaciones
- Diseño de Un TransformadorDocumento12 páginasDiseño de Un TransformadorAlejandro100% (2)
- Clase de Fluencia en Polímeros PDFDocumento15 páginasClase de Fluencia en Polímeros PDFGuido KunstlerAún no hay calificaciones
- 31-41 FisicaDocumento1 página31-41 FisicaWendy KatherineAún no hay calificaciones
- Control de Ventiladores PDFDocumento20 páginasControl de Ventiladores PDFcirilo72Aún no hay calificaciones
- Reporte BJTDocumento3 páginasReporte BJTyoAún no hay calificaciones
- Sensores Opticos VelocidadDocumento6 páginasSensores Opticos VelocidadTony StarkAún no hay calificaciones
- CNC Router ManualDocumento38 páginasCNC Router ManualAlex Hernandez de la RosaAún no hay calificaciones
- 2 Partes de La Maquina de C.CDocumento36 páginas2 Partes de La Maquina de C.CPambazo JuarezAún no hay calificaciones
- 2 - 3transformada Discreta CosenoDocumento47 páginas2 - 3transformada Discreta CosenoJuan Inga OrtegaAún no hay calificaciones
- Guia Instalacion de ProgramasDocumento45 páginasGuia Instalacion de ProgramasEmilio EscalanteAún no hay calificaciones
- Practica 3, GeneradorDocumento4 páginasPractica 3, GeneradorJonathan Gonzalez DiazAún no hay calificaciones
- Electrotecnia Introduccion v1 PDFDocumento21 páginasElectrotecnia Introduccion v1 PDFFernando GimenezAún no hay calificaciones
- Teoria - Tema 3 Algoritmos IterativosDocumento4 páginasTeoria - Tema 3 Algoritmos IterativosAdrianAún no hay calificaciones
- Ejercicios Resueltos ChandrupatlaDocumento14 páginasEjercicios Resueltos ChandrupatlaJesús RomeroAún no hay calificaciones
- Práctica de Laboratorio Con MosfetDocumento4 páginasPráctica de Laboratorio Con MosfetFernanda GrimaldoAún no hay calificaciones
- Practica 2 PotenciometroDocumento20 páginasPractica 2 PotenciometroCarlos Brayan Silva100% (1)
- Practica Sensores de TemperaturaDocumento6 páginasPractica Sensores de TemperaturaMarte ValdezAún no hay calificaciones
- Termodinámica AplicadaDocumento56 páginasTermodinámica Aplicadamarix12Aún no hay calificaciones
- Clase 3 Grados de Libertad - Ley de GrashofDocumento25 páginasClase 3 Grados de Libertad - Ley de GrashofMat angelAún no hay calificaciones
- Arduino UNO R3Documento15 páginasArduino UNO R3JulioAún no hay calificaciones
- 100 Circuitos de Shields para MotoresDe Everand100 Circuitos de Shields para MotoresCalificación: 4.5 de 5 estrellas4.5/5 (4)
- Dokumen - Tips Entrenador Transductores DL 2312hg Tese Sistema de 2017-06-06 El CircuitoDocumento146 páginasDokumen - Tips Entrenador Transductores DL 2312hg Tese Sistema de 2017-06-06 El CircuitoJulio OlivarezAún no hay calificaciones
- Po Ten Cio MetroDocumento3 páginasPo Ten Cio MetrokikeAún no hay calificaciones
- REÓSTATODocumento9 páginasREÓSTATOApolinario117Aún no hay calificaciones
- Entradas y Salidas AnalogasDocumento35 páginasEntradas y Salidas AnalogasTeresa MiAún no hay calificaciones
- Laboratorio-3 Potenciometro UpeaDocumento5 páginasLaboratorio-3 Potenciometro UpeaErvis Quispe ApazaAún no hay calificaciones
- Cuaderno de PracticasDocumento12 páginasCuaderno de PracticasJuan FerrerasAún no hay calificaciones
- Lab. 06 - Sensores Analogicos y Digitales - 2023Documento10 páginasLab. 06 - Sensores Analogicos y Digitales - 2023Alejandro VargasAún no hay calificaciones
- Potencià Metro BIODocumento3 páginasPotencià Metro BIOJacob 828Aún no hay calificaciones
- Módulo - 06 PotenciometroDocumento6 páginasMódulo - 06 PotenciometroCarlos BeitiaAún no hay calificaciones
- Divisor de Tension Con PotenciometroDocumento6 páginasDivisor de Tension Con PotenciometroGiovan Roel Huamani RamosAún no hay calificaciones
- Resistencias Variables 2222Documento8 páginasResistencias Variables 2222Juan BernaAún no hay calificaciones
- ReóstatoDocumento11 páginasReóstatoalexiberrios5Aún no hay calificaciones
- 03 - Sensores PotenciometricosDocumento21 páginas03 - Sensores PotenciometricosJuan Alcides CastroAún no hay calificaciones
- Honeywell Modutrol Series 70Documento12 páginasHoneywell Modutrol Series 70Pauly RíosAún no hay calificaciones
- Amplificador para Sensor de Sonido Hasta 10voltiosDocumento20 páginasAmplificador para Sensor de Sonido Hasta 10voltiosESAU ZamudioAún no hay calificaciones
- GUÍA DE PRÁCTICA DE LABORATORIO #1 TerminadoDocumento9 páginasGUÍA DE PRÁCTICA DE LABORATORIO #1 TerminadoSantiago ValdiviaAún no hay calificaciones
- Práctica 8. Puente de Wheatstone. Ismael Pacheco VilledaDocumento5 páginasPráctica 8. Puente de Wheatstone. Ismael Pacheco VilledaIsmael Pacheco VilledaAún no hay calificaciones
- Unidad 5 Circuito SerieDocumento8 páginasUnidad 5 Circuito SerieLuis GuerraAún no hay calificaciones
- P - F - Sensor de Temperatura Basado en Una Resistencia NTCDocumento10 páginasP - F - Sensor de Temperatura Basado en Una Resistencia NTCGabriel Borrero AAún no hay calificaciones
- Borrador Paper Proyecto Grúa Control Pid PDocumento5 páginasBorrador Paper Proyecto Grúa Control Pid PGary Fabian RamirezAún no hay calificaciones
- Pequeñas Reparaciónes de Radios Transistorizadas IIDocumento12 páginasPequeñas Reparaciónes de Radios Transistorizadas IIAdrian AcevedoAún no hay calificaciones
- Como Hacer Una Fuente de Alimentación Variable de 5ADocumento13 páginasComo Hacer Una Fuente de Alimentación Variable de 5Aheredia Sánchez Pamela YoelAún no hay calificaciones
- Potenciometro LinealDocumento7 páginasPotenciometro Linealwilliam avilaAún no hay calificaciones
- Componentes ElectronicosDocumento25 páginasComponentes ElectronicosMarco SiñaniAún no hay calificaciones
- PotenciómetroDocumento10 páginasPotenciómetroCristian Chata ClarosAún no hay calificaciones
- Ejemplos Con Entradas AnalógicasDocumento9 páginasEjemplos Con Entradas AnalógicasGabriel aquinoAún no hay calificaciones
- Instrumentacion AvanzadaDocumento207 páginasInstrumentacion AvanzadaabbyAún no hay calificaciones
- Práctica #2 Lab Sensores y ActuadoresDocumento16 páginasPráctica #2 Lab Sensores y ActuadoresDaniela Sandoval CastilloAún no hay calificaciones
- Clase3 PotenciometroDocumento7 páginasClase3 PotenciometroyoAún no hay calificaciones