Simplificaciones
Simplificaciones
Descargar como pdf o txt
También podría gustarte
- Análisis estructural básico: Apuntes de claseDe EverandAnálisis estructural básico: Apuntes de claseCalificación: 4.5 de 5 estrellas4.5/5 (7)
- Elementos de concreto reforzado IIDe EverandElementos de concreto reforzado IICalificación: 5 de 5 estrellas5/5 (1)
- Resistencia de materiales: algunos temas especiales (Segunda edición)De EverandResistencia de materiales: algunos temas especiales (Segunda edición)Calificación: 3 de 5 estrellas3/5 (4)
- Análisis Matrícial de EstructurasDocumento329 páginasAnálisis Matrícial de EstructurasCarlos Andres Santin Ortiz100% (1)
- Curso moderno de máquinas eléctricas rotativas. Tomo III: Máquinas de corriente alterna asíncronasDe EverandCurso moderno de máquinas eléctricas rotativas. Tomo III: Máquinas de corriente alterna asíncronasAún no hay calificaciones
- Problemas Dinamica PreuniversitarioDocumento3 páginasProblemas Dinamica PreuniversitarioKaren Flores JennyAún no hay calificaciones
- Análisis Estructural de Placas y LaminasDocumento22 páginasAnálisis Estructural de Placas y LaminasRachel Davis50% (2)
- Analisis de Estructuras (Metodos Clasicos y Les)Documento258 páginasAnalisis de Estructuras (Metodos Clasicos y Les)Walter Mamani100% (3)
- Matriz de Rigidez Lateral PDFDocumento48 páginasMatriz de Rigidez Lateral PDFJair Anthoni López ParedesAún no hay calificaciones
- Sistemas de puesta a tierra: Diseñado con IEEE-80 y evaluado con MEFDe EverandSistemas de puesta a tierra: Diseñado con IEEE-80 y evaluado con MEFCalificación: 4.5 de 5 estrellas4.5/5 (7)
- Análisis estructural mediante el método de los elementos finitos. Introducción al comportamiento lineal elásticoDe EverandAnálisis estructural mediante el método de los elementos finitos. Introducción al comportamiento lineal elásticoCalificación: 4.5 de 5 estrellas4.5/5 (12)
- Flexión en vigas de concreto reforzado: Método elástico (ASD)De EverandFlexión en vigas de concreto reforzado: Método elástico (ASD)Calificación: 5 de 5 estrellas5/5 (2)
- Controlador ETC-974Documento12 páginasControlador ETC-974Patricio Aliaga100% (4)
- Hellmut Ernst. Tomo1. Aparatos de Elevacion y Transporte.Documento346 páginasHellmut Ernst. Tomo1. Aparatos de Elevacion y Transporte.Cristhian Abouhadour95% (21)
- Analisis de Marcos v.2Documento28 páginasAnalisis de Marcos v.2bynAún no hay calificaciones
- Orduña XIVCNIE IX-04 PDFDocumento10 páginasOrduña XIVCNIE IX-04 PDFSebastián IdarragaAún no hay calificaciones
- Práctica 6 SAP2000Documento13 páginasPráctica 6 SAP2000Matías MartínezAún no hay calificaciones
- Verri, Alejandro - Un Modelo Simple para El Análisis No-Lineal de Vigas Prismáticas de Laminados CompuestosDocumento20 páginasVerri, Alejandro - Un Modelo Simple para El Análisis No-Lineal de Vigas Prismáticas de Laminados CompuestosFrancisco Javier Jose AngelesAún no hay calificaciones
- Teoria - Analisis Matricial - 2024Documento37 páginasTeoria - Analisis Matricial - 2024Federico GoniatAún no hay calificaciones
- Matriz LateralDocumento48 páginasMatriz LateraldarcysoriaAún no hay calificaciones
- Guia de Aprendizaje-Modelación-SEMANA 7Documento19 páginasGuia de Aprendizaje-Modelación-SEMANA 7Jimmy BustamanteAún no hay calificaciones
- Capitulo 2Documento45 páginasCapitulo 2Hope PettyAún no hay calificaciones
- Tema 12 (Análisis y Diseño de Losas)Documento15 páginasTema 12 (Análisis y Diseño de Losas)Franco de la CruzAún no hay calificaciones
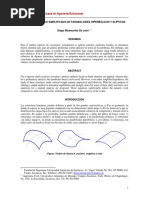
- ProbAnalisis Simplificado de Paraboloides Hiperbolicos y ElipticosDocumento20 páginasProbAnalisis Simplificado de Paraboloides Hiperbolicos y ElipticosJosé Antonio AguilarAún no hay calificaciones
- Apunte Estructuras PlegadasDocumento7 páginasApunte Estructuras PlegadasAlexis Vladimir Hurtado LoayzaAún no hay calificaciones
- Introducción A La Mecánica de MaterialesDocumento36 páginasIntroducción A La Mecánica de MaterialesAnonymous lrbBDjVb0% (1)
- Ta de Mecanica y Resistencia de Materiales - Galpon Momento Flector y Fuerza CortanteDocumento21 páginasTa de Mecanica y Resistencia de Materiales - Galpon Momento Flector y Fuerza Cortantejuan castaedaAún no hay calificaciones
- Librocalculoestructuras IDocumento40 páginasLibrocalculoestructuras ICesar Cari Flores100% (1)
- Simplificaciones Debido A Simetría y AntisimetríaDocumento26 páginasSimplificaciones Debido A Simetría y AntisimetríaPaz VerocayAún no hay calificaciones
- Unidad 5.4a - Cálculos Cerchas (Subrayada)Documento19 páginasUnidad 5.4a - Cálculos Cerchas (Subrayada)Miguel Angel Alvarado RodriguezAún no hay calificaciones
- Analisis Estructural de Solidos - Re Servo RioDocumento27 páginasAnalisis Estructural de Solidos - Re Servo RioDuverly Claudio Alarcon MaqueraAún no hay calificaciones
- Mecánica de Solidos Tres MomentosDocumento23 páginasMecánica de Solidos Tres MomentosCielo FloresAún no hay calificaciones
- 2 (Thalia)Documento11 páginas2 (Thalia)Ulysses Arroyo GalvezAún no hay calificaciones
- Ejercicios Unidad # 3 Analisis Estructural FranklinDocumento23 páginasEjercicios Unidad # 3 Analisis Estructural FranklinRenzo Alexander RestrepoAún no hay calificaciones
- Estructuras Hiperbólicas...Documento21 páginasEstructuras Hiperbólicas...Serli Ramirez José100% (1)
- Ejemplo de Capitulo 2 de Tesis PregradoDocumento8 páginasEjemplo de Capitulo 2 de Tesis PregradoedgarAún no hay calificaciones
- Matriz de Rigidez LateralDocumento49 páginasMatriz de Rigidez LateralAlexander Cruz DíazAún no hay calificaciones
- Deflexión de Pórticos PDFDocumento11 páginasDeflexión de Pórticos PDFLenin Pilco Mora100% (2)
- IMPRESO-13Análisis Puentes Curvos en Viga CajónDocumento19 páginasIMPRESO-13Análisis Puentes Curvos en Viga CajónJimmy Villca SainzAún no hay calificaciones
- Tema 5 Deflexion en VigasDocumento5 páginasTema 5 Deflexion en Vigasraul villarroelAún no hay calificaciones
- Cuestionario U3-U5Documento9 páginasCuestionario U3-U5Martin Gaston ParodiAún no hay calificaciones
- Curvas Capacidad Con RUAUMOKODocumento47 páginasCurvas Capacidad Con RUAUMOKOoscarzuluagafallaAún no hay calificaciones
- Losas ContinuasDocumento37 páginasLosas ContinuasAlejandro UrbinaAún no hay calificaciones
- Fue Desarrollada Por Los Ingenieros Franceses Clapeyron y BertotDocumento3 páginasFue Desarrollada Por Los Ingenieros Franceses Clapeyron y BertotOshin Eun-seoAún no hay calificaciones
- Bernoulli TimochenkoDocumento7 páginasBernoulli TimochenkoAdrian Campos IbañezAún no hay calificaciones
- Bielas y TirantesDocumento45 páginasBielas y TirantesBenjamin ChacónAún no hay calificaciones
- Tres MomentosDocumento14 páginasTres MomentosUlyses Mansilla Guillén100% (2)
- Ing CivilDocumento14 páginasIng CivilWilliam Ccopa PeraltaAún no hay calificaciones
- Capítulo X-Elena - Armando-Analisis EstructuralDocumento56 páginasCapítulo X-Elena - Armando-Analisis EstructuralELENA RAQUEL CAMPOS BARRANTESAún no hay calificaciones
- Teoria Del PorticoDocumento6 páginasTeoria Del PorticoHander Rivera SalinasAún no hay calificaciones
- ESTRUCTURADocumento25 páginasESTRUCTURAJ VeraAún no hay calificaciones
- Tres MomentosDocumento14 páginasTres MomentosJonathan Alexander Navarro PacherrezAún no hay calificaciones
- Placa FacilDocumento17 páginasPlaca Facilcarlos gerardinoAún no hay calificaciones
- Monografía de ResistenciaDocumento7 páginasMonografía de Resistenciamachacaparedesricardo8Aún no hay calificaciones
- Monografia de Porticos y MarcosDocumento24 páginasMonografia de Porticos y MarcosMedina YeverlyAún no hay calificaciones
- Respuestas La Evaluacion 2,3Documento7 páginasRespuestas La Evaluacion 2,3Ivan JLAún no hay calificaciones
- Monografia - Dinamica de Estructuras - Juan Carlos Jimenez Condori - 2021Documento29 páginasMonografia - Dinamica de Estructuras - Juan Carlos Jimenez Condori - 2021juan carlos jimenezAún no hay calificaciones
- Curso moderno de máquinas eléctricas rotativas: Las máquinas eléctricas en régimen dinámicoDe EverandCurso moderno de máquinas eléctricas rotativas: Las máquinas eléctricas en régimen dinámicoAún no hay calificaciones
- Transporte de Masa. Colección de ProblemasDe EverandTransporte de Masa. Colección de ProblemasAún no hay calificaciones
- UF1253 - Diagnóstico de deformaciones estructuralesDe EverandUF1253 - Diagnóstico de deformaciones estructuralesAún no hay calificaciones
- Matemáticas para ingeniería 4: Álgebra linealDe EverandMatemáticas para ingeniería 4: Álgebra linealAún no hay calificaciones
- Curso moderno de máquinas eléctricas rotativas. Tomo I: La máquina eléctrica en generalDe EverandCurso moderno de máquinas eléctricas rotativas. Tomo I: La máquina eléctrica en generalCalificación: 3 de 5 estrellas3/5 (2)
- Tipos de Estados TermodinámicosDocumento5 páginasTipos de Estados TermodinámicosRonaldo RamirezAún no hay calificaciones
- Mantenimiento TornoDocumento3 páginasMantenimiento TornoEylin LynAún no hay calificaciones
- 05 Semi - 02 - 2020 - MDI - II - Mov - Dep - RelDocumento14 páginas05 Semi - 02 - 2020 - MDI - II - Mov - Dep - RelVíctor Hugo Lezcano RiveraAún no hay calificaciones
- Potencia de MaquinariasDocumento5 páginasPotencia de MaquinariasAgostina Morales LeguizamónAún no hay calificaciones
- Dokumen - Tips Bombas WilfleyDocumento14 páginasDokumen - Tips Bombas WilfleyRaulAún no hay calificaciones
- Induccion de Seguridad para Operador de Cortadora LadrilloDocumento7 páginasInduccion de Seguridad para Operador de Cortadora LadrilloJIMENA DIAZAún no hay calificaciones
- Sistemas de Motor C175 20 (Octubre 2017)Documento130 páginasSistemas de Motor C175 20 (Octubre 2017)f100% (2)
- Mec - Fluidos2021 - Clase 1.2Documento33 páginasMec - Fluidos2021 - Clase 1.2Janet HuaracaAún no hay calificaciones
- Calculo de EjesDocumento17 páginasCalculo de EjesGuisselle Adanis Barraza AcuñaAún no hay calificaciones
- Maquinas HerramientasDocumento77 páginasMaquinas HerramientasCarlos Fredy Echeverría100% (2)
- Especificaciones Técnicas de Equipamiento en SaneamientoDocumento286 páginasEspecificaciones Técnicas de Equipamiento en Saneamientojose zunil Torrealva RodriguezAún no hay calificaciones
- Errores de Lavadora Daewoo Segun Codigos en PantallaDocumento3 páginasErrores de Lavadora Daewoo Segun Codigos en PantallazeltaifyAún no hay calificaciones
- Problemas Semana 06Documento6 páginasProblemas Semana 06pickle rickAún no hay calificaciones
- Unidad 5 Componentes Del Control ElectrohidráulicoDocumento73 páginasUnidad 5 Componentes Del Control ElectrohidráulicoAlberto NavarroAún no hay calificaciones
- AlternadorDocumento68 páginasAlternadorDavichoFlu100% (1)
- Cuestionario Doblado de Chapas Metálicas - Ricardo Mendez - Joel VillacisDocumento3 páginasCuestionario Doblado de Chapas Metálicas - Ricardo Mendez - Joel VillacisJoel VillacisAún no hay calificaciones
- Primer Taller Autónomo Corte 1.Documento3 páginasPrimer Taller Autónomo Corte 1.Lis J GRAún no hay calificaciones
- Tipos de PandeoDocumento2 páginasTipos de PandeoEdgar Silva Medina100% (1)
- Dinamica de FluidosDocumento5 páginasDinamica de FluidosfreseroalalataAún no hay calificaciones
- Movimiento Circular UniformeDocumento6 páginasMovimiento Circular UniformeEptaTlvShimithaAún no hay calificaciones
- Tanque Hidráulico y de La TransmisiónDocumento12 páginasTanque Hidráulico y de La TransmisiónRonal Quispe HuamanAún no hay calificaciones
- Tercera Práctica CalificadaDocumento1 páginaTercera Práctica CalificadaRaví García AreuAún no hay calificaciones
- Metodo Hunter PresentacionDocumento25 páginasMetodo Hunter PresentacionAbraham Rubio100% (1)
- Lista de Ejercicios 5 - Máquinas de InducciónDocumento3 páginasLista de Ejercicios 5 - Máquinas de InducciónMateo Andres OsorioAún no hay calificaciones
- Presentación de Mecánica AutomotrizDocumento13 páginasPresentación de Mecánica AutomotrizLUIS GERMAN GUARNIZO MEDINAAún no hay calificaciones
- Examen Instrumentación 1Documento2 páginasExamen Instrumentación 1JulianAún no hay calificaciones