Descargue como PDF, TXT o lea en línea desde Scribd
Descargar como pdf o txt
Está en la página 1/ 4
Universidad de Ingenierı́a y Tecnologı́a - UTEC
Departamento de Ingenierı́a Electrónica
Curso: Robótica (2016-1) Prof: Oscar E. Ramos Ponce
Práctica Calificada # 2 - Solución
Nombres y Apellidos: Tiempo: 70 minutos Preguntas: 4
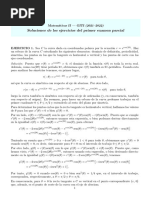
1. (6 pts) Dado el siguiente robot de 4 grados de libertad, encontrar los parámetros de Denavit- Hartenberg (se puede utilizar una tabla para indicar dichos parámetros). Utilizar los sistema de referencia mostrados en la figura. Considerar el sistema {H} (de la herramienta) como el sistema {4}.
Figura 1: Robot de 4 grados de libertad para la pregunta 1.
Solución: Por inspección de la figura los parámetros DH son
Notar que las variables articulares son q1 , l5 , l7 , q4 donde la primera y la última son articulaciones de rotación (o revolución) y las otras dos son articulaciones prismáticas (o de traslación).
Página 1 de 4 2. (6 pts) Dada la siguiente matriz de transformación homogénea que describe la posición y orien- tación del efector final con respecto de la base (con algunos componentes desconocidos): − sin θ1 sin θ3 − sin θ1 cos θ3 cos θ1 −q2 sin θ1 − a3 sin θ1 sin θ3 cos θ1 sin θ3 cos θ1 cos θ3 sin θ1 q2 cos θ1 + a3 cos θ1 sin θ3 T = , ? ? 0 d1 − a2 − a3 cos θ3 0 0 0 1 calcular la cinemática inversa. Las articulaciones en este caso son θ1 , q2 y θ3 donde θ1 , θ3 son de revolución y q2 es prismática. Suponer que la matriz conocida (numérica) es nx ox ax p x ny oy ay py T =nz oz az pz
0 0 0 1
Solución:
s1 ay Para el ángulo θ1 se tiene que ax = c1 y ay = s1 . Dividiendo se obtiene c1 = ax = tan(θ1 ) de donde θ1 = atan2(ay , ax )
Para obtener θ3 se puede utilizar los términos correspondientes a ny = c1 s3 y oy =
n c1 c3 . Dividiendo ambos se obtiene oyy = cc11 sc33 = tan(θ3 ) y de allı́
θ3 = atan2(ny , oy )
Para la articulación prismática q2 se puede utilizar los términos px y py . Multiplicando
cada uno de ellos con s1 y c1 , respectivamente, y sustrayendo se obtiene
Y dado que c1 = ax y s1 = ay , despejando se llega a
q2 = ax py − ay px − a3 s3
que está definida ya que al llegar a este punto ya se halló θ3 y por tanto ya se conoce su seno. Notar que los términos identificados en la matriz con ? no son necesarios para calcular la cinemática inversa. Además, esta no es la única solución posible. Pueden existir otras soluciones.
Página 2 de 4 3. (5 pts) Se desea que la tercera articulación de un robot de 6 grados de libertad se mueva de un ángulo inicial de 20◦ a un ángulo final de 80◦ en 4 segundos. Calcular los coeficientes para un polinomio de tercer orden en el espacio articular. Se asume que el robot comienza del reposo pero debe tener una velocidad final de 5 ◦ /s.
Solución: Sea el polinomio de tercer orden
q(t) = at3 + bt2 + ct + d (1)
cuya derivada (velocidad) es
q̇(t) = 3at2 + 2bt + c. (2) Las condiciones del problema son q(0) = 20◦ , q(4) = 80◦ , q̇(0) = 0◦ /s, q̇(4) = 5◦ /s de donde, utilizando las condiciones en t = 0 y reemplazando en las ecuaciones anteriores, se obtiene directamente c = 0 y d = 20. Reemplazando las condiciones finales en (1) y (2), se tiene
q(4) = 80 = 64a + 16b + 20
q̇(4) = 5 = 48a + 8b
Multiplicando la segunda de estas ecuaciones por −2, y luego sumando con la primera 25 ecuación, y haciendo operaciones algebraicas elementales se tiene a = − 16 = −0.5625. Reemplazando este valor en cualquiera de las 2 ecuaciones anteriores se obtiene b = 10. Finalmente, la ecuación del polinomio es
q(t) = −1.5625t3 + 10t2 + 20
4. (3 pts) El efector final de un robot de 7 grados de libertad tiene una orientación, respecto del sistema de la base, descrita por los ángulos roll, pitch, yaw (φr , φp , φy ) = ( π2 , π2 , 0). En el instante actual, la razón de cambio de estos ángulos es (φ̇r , φ̇p , φ̇y ). Determinar la velocidad angular del efector final en el instante actual en función de la razón de cambio de los ángulos roll, pitch, yaw.
Solución: La relación entre la velocidad angular y la razón de cambio de los ángulos roll, pitch, yaw está dada por cos(φp ) cos(φr ) − sin(φr ) 0 φ̇y ω = cos(φp ) sin(φr ) cos(φr ) 0 φ̇p . − sin(φp ) 0 1 φ̇r
Página 3 de 4 Reemplazando los valores por los indicados en la pregunta, se tiene