TOPO I+II+Cor-compil Extrait
TOPO I+II+Cor-compil Extrait
Transféré par
Aimane LamfichekhDroits d'auteur :
Formats disponibles
TOPO I+II+Cor-compil Extrait
TOPO I+II+Cor-compil Extrait
Transféré par
Aimane LamfichekhCopyright
Formats disponibles
Partager ce document
Partager ou intégrer le document
Avez-vous trouvé ce document utile ?
Ce contenu est-il inapproprié ?
Droits d'auteur :
Formats disponibles
TOPO I+II+Cor-compil Extrait
TOPO I+II+Cor-compil Extrait
Transféré par
Aimane LamfichekhDroits d'auteur :
Formats disponibles
Topographie et topomtrie - S. Milles, J.
Lagofun
Topographie et topomtrie - S. Milles, J. Lagofun
Topographie et topomtrie - S. Milles, J. Lagofun
Topographie et topomtrie - S. Milles, J. Lagofun
Topographie et topomtrie - S. Milles, J. Lagofun
Topographie et topomtrie - S. Milles, J. Lagofun
Topographie et topomtrie - S. Milles, J. Lagofun
Topographie et topomtrie - S. Milles, J. Lagofun
Topographie et topomtrie - S. Milles, J. Lagofun
Topographie et topomtrie - S. Milles, J. Lagofun
Topographie et topomtrie - S. Milles, J. Lagofun
Topographie et topomtrie - S. Milles, J. Lagofun
Topographie et topomtrie - S. Milles, J. Lagofun
Topographie et topomtrie - S. Milles, J. Lagofun
INTRODUCTION
INTRODUCTION
Cette introduction a pour but de justifier lordre des diffrentes parties abordes dans cet
ouvrage ainsi que leurs liens logiques dans lensemble complexe quest la topographie.
FI8klII 0 lk I0F068kFhI
Comme souvent, il est pratique de partir de la finalit pour remonter aux techniques
mises en uvre et les justifier ainsi.
En schmatisant, on peut dire que la topographie a pour objectifs principaux de permettre
ltablissement de cartes et de plans graphiques sur lesquels sont reprsentes, sous
forme symbolique, toutes les informations ayant trait la topologie du terrain et ses
dtails naturels et artificiels. Cette cartographie de donnes existantes permettra par
exemple de sorienter sur le terrain ou bien dtudier un projet de construction.
00MM8I kIII808 08 0810IIF8
tahIIssemeat 4e cartes etIte cheIIe
La premire ide qui vient lesprit est deffectuer des prises de vue ariennes par avion
ou par satellite puis de transcrire ces informations sur papier. Dveloppons cet exemple.
2AHIFA?JELA ?EGKA
Une photographie est une perspective conique et non une reprsentation plane. De plus,
le relief napparat pas sur une photographie...
Topographie et topomtrie - S. Milles, J. Lagofun
GODSIE, CARTOGRAPHIE 9
2
GODSIE,
CARTOGRAPHIE
1 688klII8 I 0FI8III088
La godsie est une des sciences de base ncessaires au topographe. Sa matrise nest pas
indispensable : elle relve du domaine du spcialiste mais un aperu centr sur les
incidences de la forme et des caractristiques de la terre sur la topographie est indispen-
sable. Ceci permet dintroduire et de justifier les problmes de projection plane et leurs
incidences sur la carte de base, les choix de points et de surfaces de rfrence pour un
systme de coordonnes gnral, etc. Mais, dfinissons dans un premier temps, le
vocabulaire de base.
Topomtrie : du grec topos signifiant le lieu et mtrie signifiant lopration de mesurer.
Cest donc lensemble des techniques permettant dobtenir les lments mtriques
indispensables la ralisation d'un plan grande ou trs grande chelle (voir Lever de
dtail, chap. 8).
Ces lments ncessitent diffrentes mesures sur le terrain suivies de nombreux calculs,
schmas et croquis. Cest un domaine vaste qui demande de nombreuses comptences
auxquelles loutil informatique est aujourdhui indispensable.
Topographie : association de topos et de graphein qui, en grec, signifie dcrire. Cest
donc la science qui donne les moyens de reprsentation graphique ou numrique dune
surface terrestre.
La nuance entre ces deux techniques rside dans le fait quen topographie le terrain est
reprsent in situ alors quen topomtrie les calculs et reports sont des phases ultrieures
au travail sur le site.
Topologie : cest la science qui analyse les lois gnrales de la formation du relief par les
dformations lentes des aires continentales appeles mouvements pirogniques,
Topographie et topomtrie - S. Milles, J. Lagofun
10 GODSIE, CARTOGRAPHIE
attnus ultrieurement par les actions externes : rosion due la mer, au vent, la glace,
leau et la neige.
Godsie : cest la science qui tudie la forme de la terre. Par extension, elle regroupe
lensemble des techniques ayant pour but de dterminer les positions planimtriques et
altimtriques dun certain nombre de points godsiques et repres de nivellement.
Cartographie : cest lensemble des tudes et oprations scientifiques, artistiques et
techniques intervenant partir dobservations directes ou de lexploitation dun docu-
ment en vue dlaborer des cartes, plans et autres moyens dexpression. Ci-aprs, est
donne une classification des cartes en fonction de leur chelle et de leur finalit :
Canevas : cest lensemble des points connus en planimtrie et/ou en altimtrie avec une
prcision absolue homogne.
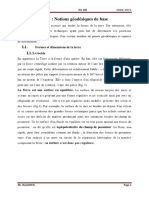
2 F08M8 I 0IM88I088 0 lk I88
2.1 6o4e
En apparence la Terre a la forme dune sphre. En fait, elle est lgrement dforme par
la force centrifuge induite par sa rotation autour de laxe des ples : la Terre nest pas un
corps rigide. Cette dformation est relativement faible : tassement de 11 km au niveau
des ples par rapport un rayon moyen de 6 367 km et renflement de 11 km au niveau
de lquateur. Elle a donc laspect dun ellipsode de rvolution dont le petit axe est laxe
de rotation : laxe des ples (fig. 2.2.).
che||es f|no||t
1/1 000 000 1/500 000 Co|cs qoqo||qecs
1/250 000 1/100 000 Co|cs |ooqo||qecs c|||c c|c||c
1/50 000, 1/25 000 [bosc}, 1/20 000 Co|cs |ooqo||qecs moyceec c|c||c [lGN}
1/10 000 Co|cs |ooqo||qecs qoedc c|c||c
1/5 000
l|oes |ooqo||qecs d'|edc,
|oes d'eboe|smc
1/2 000
l|oes d'occeo||oe dcs so|s [lOS},
dcsc||||s occ||o|cs
1/1 000, 1/500 l|oes occ||o|cs, codos|oex ebo|es
1/200
l|oes dc o||c, d'|m|oe|o||oe,
dc |o||sscmce|
1/100 l|oes dc o||, |oes dc mossc
1/50 l|oes d'oc|||cc|ec, dc co||oqc, c|c.
Topographie et topomtrie - S. Milles, J. Lagofun
GODSIE, CARTOGRAPHIE 11
La Terre est une surface en quilibre. La surface du niveau moyen des mers et ocans
au repos na pourtant pas une forme rgulire et ne concide ainsi pas avec un ellipsode
de rvolution : elle nest pas rgulire mais ondule, prsente des creux et des bosses
(fig. 2.1.). Par exemple, la surface de la mer se bombe au-dessus dun volcan et se creuse
au-dessus des grandes fosses ocaniques parce que les reliefs crent des excs ou des
dficits de matire produisant ainsi des variations locales du champ de pesanteur. Or la
surface dun fluide en quilibre est en tout point normale aux forces de pesanteur : on dit
quelle est quipotentielle du champ de pesanteur. La Terre, non rigide, peut tre
considre comme un fluide ; la direction des forces de pesanteur varie dun endroit un
autre en raison de la rpartition htrogne de la matire composant la Terre ; sa surface
nest donc pas rgulire.
La surface des mers et ocans au repos recouvrant toute la Terre est appele gode
(fig. 2.1.) ; voir aussi le paragraphe 6.1.
Le gode, niveau des mers prolong sous les continents, est donc une surface gauche
laquelle on ne saurait appliquer des relations mathmatiques de transformation. Il est la
surface de rfrence pour la dtermination des altitudes, autrement dit la surface de
niveau zro. En ralit, la rfrence en altitude dpend du choix du repre fondamental
et du systme daltitude. Il sensuit que la surface de niveau zro est lgrement diff-
rente du gode ; lcart est constant et reprsente laltitude du point fondamental au-
dessus du gode (se reporter au paragraphe 6.3.).
Remarque
Lorsque le topographe (ou le maon) cale la bulle de son niveau, il matrialise un plan
tangent au gode qui correspond la surface dquilibre des eaux (pente dcoulement
des eaux nulle). On obtient ainsi partout lorientation de la verticale physique dun
lieu. Il est intressant de noter quaucune autre rfrence noffre de telles facilits.
Fig. 2.1. : Ellipsode et gode
Topographie et topomtrie - S. Milles, J. Lagofun
12 GODSIE, CARTOGRAPHIE
2.2 IIIso4e 4e rvoI0tIoa
2.2.1 IInIIIons
La surface la plus proche du gode est un ellipsode de rvolution, cest--dire un
volume engendr par la rotation dune ellipse autour dun de ses deux axes. La terre
tournant autour de laxe des ples (de demi-longueur b, fig. 2.2.), cette rotation engendre
un cercle quatorial de rayon a.
Les dimensions de lellipsode sont dtermines en comparant la distance par mesures
godsiques et la diffrence de latitude par mesures astronomiques entre deux points
dun mme mridien.
Un mridien est lintersection de
la surface de lellipsode avec un
plan contenant laxe des ples :
cest donc une ellipse.
Un parallle est lintersection de
la surface de lellipsode avec un
plan perpendiculaire laxe des
ples : cest donc un cercle.
Tous les mridiens sont gaux
entre eux ( quelques carts prs).
Leur rayon de courbure diminue
des ples vers lquateur, donc
leur courbure (inverse du rayon)
augmente.
Il nexiste pas un ellipsode global unique mais plusieurs ellipsodes locaux dfinis pour
chaque pays, chacun adoptant un ellipsode le plus proche possible du gode local. Ceci
explique que les ellipsodes diffrent dun pays lautre. Pour la godsie franaise, on
utilise lellipsode dfini en 1880 par Clarke et dont les caractristiques, trs lgrement
modifies par lIGN par rapport lellipsode initial, sont les suivantes :
G Demi-grand axe : a = 6 378 249,20 m
G Demi-petit axe : b = 6 356 515,00 m
G Aplatissement :
1
G Excentricit e :
1
f vient de flattening en anglais.
Fig. 2.2. : Ellipsode de rvolution
f
a b
a
------------
1
293 466 021 3 ,
----------------------------------- = =
e
2 a
2
b
2
a
2
---------------- 0 006 803 487 646 , = =
Topographie et topomtrie - S. Milles, J. Lagofun
GODSIE, CARTOGRAPHIE 13
Cest lellipsode de rfrence actuellement utilis comme surface de projection pour
ltablissement de cartes et plans assez tendus.
Il a t choisi le plus proche possible du gode, cest pourquoi :
G il est tangent au gode au Panthon, Paris ;
G les carts entre gode et ellipsode ne dpassent pas 14 m en France (voir 6.1).
Ces caractristiques sont en cours de modification afin de mettre en place un systme
international, de plus en plus ncessaire. Le dveloppement du GPS et des travaux de
godsie raliss au niveau europen imposent ces modifications (voir 5.3).
2.2.2 kuIras aIIIpsodas
Comme nous lavons dit au paragraphe prcdent, dautres ellipsodes ont t ou sont
utiliss. Leurs caractristiques sont les suivantes :
Lellipsode Clarke 1880 (IGN) est associ au systme national appel Nouvelle Trian-
gulation Franaise utilisant la projection Lambert (voir 3.4).
Le systme WGS 84 (World Gnral System 1984) sert de base au systme gocentrique
de rfrence utilis en GPS (chap. 7 1). Son ellipsode IAGRS 80 est trs proche de
GRS 80 (Geodetic Reference System 1980).
Le systme European Datum 1950 utilise la projection Universal Transverse Mercator
(voir 3.5).
Le tableau suivant donne les dcalages dorigine tx, ty et tz connus quelques mtres prs
dans un repre gocentrique dfini au paragraphe 2.2.3.1. pour les couples IAGRS 80 -
Clarke 80 et Hayford 09 - Clarke 80. Pour le premier couple, sont galement donns le
facteur dhomothtie k et les rotations daxes rx, ry, et rz.
L|||psode
grond
oxe o (m)
pet|t oxe b (m)
Lxcentr|c|t e
1]op|ot. 1/f
Syst. gods|que
o|nt Iondomento|
ro|ect|on
Mr|d|en or|g|ne
0|orke
1880
378 2=9,200
35 515,000
0,082=832573
293,=0213
N!l
loe||oe
lombc|
lo|s
RoyIord
1909
378 388,000
35 911,9=
0,08199189022
297,0000000
Lu 50
lo|sdom
U!V
Gccew|c|
0kS 1980
378 137,000
35 752,300
0,0818192180
298,257025
le|ceo||oeo|
lA0kS
1980
378 137,000
35 752,31=
0,08181919131
298,257222101
wGS 8=
Topographie et topomtrie - S. Milles, J. Lagofun
14 GODSIE, CARTOGRAPHIE
Ces paramtres permettent de
transformer les coordonnes de
points dun systme un autre par
une similitude euclidienne (adap-
tation du type Helmert dfinie au
tome 2, chapitre 1, 10.3) trois
ou sept paramtres selon la pr-
cision cherche (voir aussi tome 2
chap. 5 8.2.8). Pour la cartogra-
phie petite chelle, la prcision
de quelques mtres est suffisante
et on peut ainsi se contenter de
cette similitude trois paramtres.
Pour plus de prcision (dcimtri-
que), on utilise une similitude sept paramtres dtermins localement par observation
de points connus dans deux systmes diffrents. Par exemple, dans les prochaines di-
tions de ses fiches de points godsiques, lIGN proposera les paramtres de la transfor-
mation trois ou sept paramtres la mieux adapte chaque lieu pour passer du systme
WGS 84 (ellipsode IAGRS 80) au systme NTF (ellipsode Clarke 80) puis au systme
RGF 93 (voir 5.3).
2.2.3 8ysImas da roordonnas
2.2.3.1 5yslme gacealrlque
Un systme de rfrence gocen-
trique est un repre (O, X, Y, Z)
(fig. 2.3-a.) tel que :
G O est proche du centre des
masses de la terre (au mieux
quelques dizaines de mtres
prs pour les systmes raliss
par godsie spatiale) ;
G laxe OZ est proche de laxe de
rotation terrestre ;
G le plan OXZ est proche du plan
du mridien origine.
Dans un systme de rfrence godsique, un point de la crote terrestre est considr
fixe bien quil soit soumis de faibles mouvements, dus aux mares terrestres, dune
amplitude infrieure 30 cm et aux mouvements tectoniques, provoquant des dplace-
ments infrieurs 10 cm par an.
De :
Vers :
lA0kS 80
0|orke 80
RoyIord 09
0|orke 80
rx (m) 18 8=
ry (m) 0 - 37
rz (m) - 320 - =37
rx (gon) 0
ry (gon) 0
rz (gon) - 0,55=
k = 1 + J 1 - 21,98 . 10
a&
Fig. 2.3-a. : Coordonnes gocentriques
Topographie et topomtrie - S. Milles, J. Lagofun
GODSIE, CARTOGRAPHIE 15
2.2.3.2 5yslme agraklque
Laxe de rotation de la terre est
laxe des ples PP. Le cercle per-
pendiculaire laxe des ples est
lquateur. La demi-ellipse mri-
dienne passant par les ples et par
un point A est la mridienne de A
(fig. 2.3-b.).
Un point sur lellipsode est
repr par sa longitude et sa lati-
tude (rapportes la normale (n
a
)
lellipsode en A).
Elles sont dfinies ci-aprs.
G Longitude () : la longitude
dun lieu A est langle didre
form par le mridien du lieu
avec le mridien origine. Elle
est comprise entre 0 et 180 Est ou Ouest. Le mridien origine international est celui
de Greenwich (observatoire de la banlieue de Londres).
G Latitude () : la latitude de A est langle que fait la verticale (n
a
) de A avec le plan
de lquateur. Elle est comprise entre 0 90 Nord ou Sud. Les cercles perpendicu-
laires la ligne des ples PP sont appels parallles : ils sont parallles au plan de
lquateur.
Hauteur ellipsodale (h) : un point A situ sur la surface de la terre et sur la mme
verticale que A, on associera une troisime coordonne correspondant la hauteur au-
dessus de lellipsode, note h, mesure suivant la normale (n
a
).
Remarque
Par la suite, nous parlerons plus volontiers de coordonnes godsiques puisquelles
sont associes un ellipsode donc un systme godsique donn.
2.2.4 8ysImas godsIquas
Un systme godsique est dfini par :
G un ellipsode, choisi le plus proche possible du gode local ;
G un systme de reprsentation plane ;
G un point fondamental (sauf dans le cas dun systme gocentrique o il ny a pas de
point fondamental) dont les coordonnes sont dtermines par des mesures
astronomiques ; en ce point, la normale lellipsode est confondue avec la verticale
cest--dire la normale au gode.
Fig. 2.3-b. : Coordonnes gographiques
Topographie et topomtrie - S. Milles, J. Lagofun
18 GODSIE, CARTOGRAPHIE
2.3.1.3 6aurhe quelcaaque sur uae surlace
Considrons une courbe gauche sur laquelle est dfinie en M une tangente Mt. Le plan
limite P de deux tangentes infiniment voisines est appel plan osculateur et la perpendi-
culaire la courbe situe dans ce plan est la normale principale ( ).
En gnral, la normale principale est diffrente de la normale la surface ( ).
Les courbes telles que ( ) confondue avec ( ) sont appeles godsiques ; elles ont des
proprits intressantes puisque :
G entre deux points, la godsique est la ligne de longueur minimale ;
G la courbure dune godsique est la courbure de la section normale qui lui est
tangente.
2.3.2 odsIquas
2.3.2.1 aJslques Je la skre
Les godsiques de la sphre sont des grands cercles. En tous points de ces cercles, la
normale principale passe par le centre de la sphre ; elle est donc confondue avec la
normale la sphre. Les angles compris entre une godsique et les mridiens sont tous
diffrents.
Pour aller du point M au point M, le plus court chemin est la godsique ; ces grands
cercles, trajectoires de longueur minimale, sont appels orthodromie (fig. 2.9.).
N
n
Fig. 2.7. : (P) plan osculateur Fig. 2.8. : Godsique
N n
Topographie et topomtrie - S. Milles, J. Lagofun
GODSIE, CARTOGRAPHIE 19
On dfinit la loxodromie comme une courbe qui coupe tous les mridiens sous un azimut
constant Z (voir la dfinition dun azimut au 4.2) ; entre les deux points A et B, le
chemin le plus court est la godsique ; la loxodromie, plus facile suivre, oblige
parcourir un trajet plus long (fig. 2.10.).
2.3.2.2 aJslques Je lelllsaJe
Entre deux points A et B de lellipsode passe une godsique (G) qui reprsente la
trajectoire la plus courte de A B. (G) est une courbe gauche, trs voisine des sections
normales (n
a
B) et (n
b
A).
Les angles mesurs depuis les points A et B
sont les angles didres entre les plans verticaux
contenant chacun des points viss A et B,
larte tant la verticale de chaque station ; on
assimile les verticales de chaque station aux
normales la surface et les traces des plans
verticaux aux godsiques joignant les points.
Le point B est repr depuis le point A par
lazimut Az (fig. 2.11.). Langle est compt
positif en sens horaire depuis le mridien de A
vers la vise AB, et la distance AB est la lon-
gueur de la godsique.
Fig. 2.9. : Orthodromie Fig. 2.10. : Loxodromie
Fig. 2.11. : Godsique de lellipsode
Topographie et topomtrie - S. Milles, J. Lagofun
20 GODSIE, CARTOGRAPHIE
2.4 0oacI0sIoa
Il nexiste pas de calculs trigonomtriques sur lellipsode. On est donc amen utiliser
la trigonomtrie sphrique (tome 2 chap. 5 4.4) et adopter la sphre se rapprochant
le plus de lellipsode dans la rgion considre.
Son rayon R
N
est gal :
Au voisinage du parallle 49 gon pour lellipsode Clarke 1880, on a R
N
= 6 377,53 km.
En reprenant les expressions de et , rayons de courbure des
sections normales principales, ( 2.3.1.2), on obtient :
avec : a, longueur du demi grand axe de lellipsode en mtre;
e, excentricit ( 2.2.2) ;
, latitude de la rgion considre.
a) Calculez le rayon R
N
de la sphre au voisinage des parallles 52 gon et 55 gon.
b) Calculez le rayon de la sphre R
N
aux latitudes extrmes de la France mtropolitaine
(environ 47 et 57 gon).
a) 6 379,58 et 6 381,62 km.
b) 6 376,16 et 6 382,96 km. On peut donc prendre comme valeur moyenne de R
N
en
France : R
N
6 380 km. On trouve aussi comme valeur moyenne du rayon terrestre
.
3 8F888IkII08 Flk8 0
l'llIF800
3.1 Iatro40ctIoa
Tous les systmes de projection de la surface dun ellipsode sur un plan dforment
les longueurs.
R
N
=
R
N
a 1 e
2
1 e
2
sin
2
------------------------------- =
Application
Rponse
R
a b +
2
------------ = 6 367 km
Topographie et topomtrie - S. Milles, J. Lagofun
GODSIE, CARTOGRAPHIE 21
Par suite, la reprsentation plane de lellipsode nest quune correspondance ponc-
tuelle entre points de lellipsode M(, ) et points du plan m (E, N), E pour coordonne
Est (ou x) et N pour Nord (ou y) (fig. 2.12.).
Les figures traces sur lellipsode seront donc dformes quelle que soit la reprsenta-
tion adopte.
3.2 0formatIoas 4es fI0res
3.2.1 6aIruI du moduIa IInaIra
Soit un arc de courbe sur lellipsode
auquel correspond un arc de courbe
sur le plan (fig. 2.13.). On appelle module
linaire m le rapport :
On remarque que le module linaire m
varie avec la position de I et la direction de
IJ.
m est aussi appel module de rduction la projection : cest le rapport de la longueur
de limage sur un plan de projection dune courbe la longueur de la courbe sur lellip-
sode.
Fig. 2.12. : Reprsentation plane
Fig. 2.13. : Dformation dun arc
IJ
)
ij
)
m
ij
IJ
------
ds
dS
------ = =
)
)
Topographie et topomtrie - S. Milles, J. Lagofun
22 GODSIE, CARTOGRAPHIE
3.2.2 IndIraIrIra da IIssoI
En un point I, llment darc de longueur dS a pour image de longueur m. dS
= ds. Lorsque J dcrit le cercle de centre I de rayon dS, j dcrit autour de i une ellipse de
rayon vecteur ds = m. dS. Limage du cercle de rayon dS = 1 est une ellipse de demi-axes
a et b, appele indicatrice de Tissot (fig. 2.14.).
Lindicatrice de Tissot reprsente localement les variations de m ; elle change de dimen-
sions en tout point.
3.2.3 kIIraIIons IInaIra aI anguIaIra
Le coefficient daltration linaire est dfini par :
Laltration angulaire est la diffrence des angles entre les arcs lmentaires correspon-
dants, soit .
3.3 0IassIfIcatIoa 4es rerseatatIoas
Toutes les reprsentations dforment les distances. Il est toutefois possible de calculer
des correspondances.
G Si les angles entre courbes correspondantes sont gaux, on dit que la reprsenta-
tion est conforme. m est uniquement fonction du point I et indpendant de la direction
IJ ; lindicatrice de Tissot est un cercle (fig. 2.15.).
On utilise principalement deux types de reprsentation :
G le systme de projection conique o lellipsode est projet sur le cne tangent un
parallle ; donc seule la rgion proche de celui-ci est correctement reprsente ;
IJ
)
ij
)
Fig. 2.14. : Indicatrice de Tissot
k
ds dS
dS
------------------ m 1 = =
ij , ik ( ) IJ , IK ( )
Topographie et topomtrie - S. Milles, J. Lagofun
GODSIE, CARTOGRAPHIE 23
le systme de projection cylindrique o lellipsode est projet sur un cylindre circons-
crit le long de lquateur ou dun mridien ; dans ce dernier cas, la reprsentation est dite
cylindrique transverse (fig. 2.16.) ; le dveloppement du cylindre permet de ne repr-
senter correctement que les seules rgions voisines du mridien de tangence.
G Si les surfaces des figures lmentaires sont gales, on dit alors que la reprsenta-
tion est quivalente.
Par exemple, la projection de Bonne, utilise par F. Bonne au XVIII
e
sicle pour tablir la
carte dtat-major au 1/80 000, est dduite de la projection conique dont le parallle
origine et le mridien origine sont conservs. On trace les parallles concentriques au
parallle origine aprs avoir report leurs espacements le long du mridien origine. On
trace ensuite les mridiens aprs avoir report leurs espacements sur chaque parallle ;
on obtient alors des quadrilatres dont les dimensions (espacements des parallles et des
mridiens) sont conserves, donc la superficie lest galement. Mais les angles et les
distances tant dforms, ces altrations sont aujourdhui inacceptables pour dresser les
nouvelles cartes de base au 1/20 000.
Fig. 2.15. : Reprsentation conforme
Fig. 2.16. : Diffrentes projections planes
Topographie et topomtrie - S. Milles, J. Lagofun
48 GODSIE, CARTOGRAPHIE
Le point de coordonnes gographiques = 6 50 lest de Greenwich et = 43 33
nord est situ environ 325 km en abscisse UTM (voir carte fig. 2.36.). Comment
retrouver lordre de grandeur de cette valeur ?
La longitude suprieure 6 est de Greenwich montre que nous sommes dans le fuseau
n 32, cest--dire 9 6 50 soit 2 30 louest de lorigine du fuseau 32 dabscisse
500 km. En notant que le rayon dun parallle est peu prs gal R
moyen
. cos, on
obtient :
(9 650)( / 180) 6380 cos(4333) 175 km. Labscisse sera denviron 500 175
325 km.
4 l0I08 0 0k8I8
4.1 0arte 4e hase
On a tabli au paragraphe 2.
que le systme de reprsen-
tation Lambert est une pro-
jection de la France au
voisinage dune isomtre
centrale sur un cne tangent
cette isomtre. Les mri-
diens sont donc des droites
convergentes vers limage p
du ple P et les parallles
des arcs de cercles concen-
triques de rayon #.
Les feuilles de la carte de
France au 1/25 000 sont
dcoupes le long de mri-
diens et parallles (ceci
explique quune carte IGN
se lit toujours face au nord
gographique) ; les cts Est
et Ouest de la carte sont
donc convergents et les
cts Nord et Sud sont des
arcs de cercles (fig. 2.33.). Si la convergence et la courbure sont difficilement dcelables,
on constate quune carte du Nord est plus troite quune carte du Sud de la France.
Application
Rponse
Fig. 2.33. : Dcoupage de la carte de base
Topographie et topomtrie - S. Milles, J. Lagofun
GODSIE, CARTOGRAPHIE 49
a) Calculez la diffrence de largeur de deux cartes situes aux 49 et 55 gon de latitude
sachant quune carte au 1/25 000 a une diffrence de longitude de 0,2 gon.
b) Calculez et vrifiez graphiquement la convergence des mridiens en un point dune
carte.
a) 1,374 km = [0,2 . sin55 . m
L
. #
o55
0,2 sin49 . m
L
. #
o49
] / 200. Les valeurs de
m
L
. #
o
donnes au paragraphe 3.4.4.2. On peut retrouver un ordre de grandeur en
considrant que le rayon approch dun parallle de latitude est gal R
moy
. cos
avec R
moy
6 380 km ; on obtient ici 0,2 (/ 200) . 6 380 . (cos49 cos55) = 1,377 km.
b) Par exemple, Antibes, 3,66 gon.
4.2 0fIaItIoa 40 aor4
Sur une carte IGN, on remarque en lgende le croquis
ci-contre (fig. 2.34.). Il est mentionn : La dclinaison
magntique correspond au centre de la feuille, au 1
er
Janvier 1993. Elle diminue chaque anne de 0,16 gon
(0 08) .
Le nord gographique et le nord magntique sont dis-
tincts.
Le nord gographique est la direction du mridien du
point (ici le centre de la carte) vers le ple Nord.
Le nord magntique est la direction de laiguille
aimante, cest--dire du champ magntique terrestre
du moment et du lieu. Le champ magntique terrestre,
plus intense aux ples que dans les rgions quato-
riales, est tel que ses lignes de champ ne suivent pas la
direction des mridiens mais laxe des ples gomagntiques est inclin de 11 30 sur
laxe terrestre. Il est en outre sujet de lentes variations dorientation.
Langle entre le nord gographique et le nord magntique est la dclinaison magntique
d : elle varie dans le temps et dans lespace (actuellement elle diminue denviron
0,16 gon par an). Actuellement, la dclinaison est occidentale.
Le Nord du quadrillage du systme de projection est la direction des ordonnes Y
positifs en ce point (fig. 2.35.) ; il est encore appel Nord Lambert.
Application
Rponse
Fig. 2.34. : Nord magntique
Topographie et topomtrie - S. Milles, J. Lagofun
50 GODSIE, CARTOGRAPHIE
Dans le systme de projection Lambert, langle entre le
Nord gographique et la direction des ordonnes Y
positifs en un point est la convergence des mridiens
( 3.4.1.4).
On appelle Azimut Az langle compt positivement en
sens horaire depuis le nord gographique, Gisement G
langle compt positivement en sens horaire depuis le
nord Lambert.
Implantez le nord magntique en un point du lyce
du gnie civil dAntibes.
Cela revient calculer langle ( + d) que lon doit ouvrir depuis le nord Lambert
(accessible sur le terrain partir de la connaissance de deux points du rseau IGN).
1) Convergence des mridiens : elle est soit mesure graphiquement sur une carte
(angle entre les limites de la carte et le quadrillage Lambert), soit calcule comme au
paragraphe 3.4.5.2. 3,66 gon Antibes.
2) Dclinaison magntique : de lordre de 1,02 gon au 1
er
janvier 1993, elle diminue de
0,16 gon par an et vaudrait donc environ 0,22 gon au 1
er
janvier 1998 (dclinaison
occidentale).
Langle ouvrir depuis le nord Lambert pour obtenir le nord magntique est donc de
lordre de 3,88 gon vers lOuest Antibes.
4.3 8easeIaemeats orts ea mare 4e Ia carte
Les numros des repres dfinis ci-aprs correspondent ceux de la figure 2.36.
a) Repre 1 : numrotation des feuilles adjacentes.
b) Repre 2 : en gnral, le dcoupage dune feuille au 1/25 000 se fait suivant les
mridiens et les parallles de 0,20 gon en 0,20 gon , reprsentant une superficie de lordre
de 20 13 15 km. Le mridien origine est le mridien de Paris.
La longitude et la latitude des mridiens et parallles limitant la carte sont aussi donnes
en degrs sur lellipsode Hayford 09 ; les longitudes sont exprimes par rapport au
mridien international de Greenwich.
Fig. 2.35. : Les trois nords
Application
Rponse
Topographie et topomtrie - S. Milles, J. Lagofun
GODSIE, CARTOGRAPHIE 51
c) Repre 3 : lchelle extrieure permet de dterminer les coordonnes gographiques
en degrs dans le systme europen (ellipsode de Hayford), le mridien 0 tant le
mridien de Greenwich. Elles sont indiques toutes les cinq minutes sexagsimales.
Lchelle extrieure (12) est gradue toutes les minutes sexagsimales.
d) Repre 4 : lchelle intrieure sert dterminer les coordonnes gographiques en
gons rapportes au systme godsique franais, le mridien origine tant le mridien de
Paris. Elles sont indiques tous les 0,10 gon.
Lchelle intrieure (11) est gradue tous les 0,01 gon.
e) Repres 5 et 6 : lintrieur du cadre sont portes les amorces du quadrillage kilom-
trique de la reprsentation conique conforme Lambert.
Un chiffre prcdant lordonne prcise la zone dans laquelle se situe la carte : 3 151
indique que le point est situ en zone Lambert III, lordonne lire tant 151 km.
Fig. 2.36. : Extrait de carte au 1/25 000
Topographie et topomtrie - S. Milles, J. Lagofun
54 GODSIE, CARTOGRAPHIE
La dtermination des points godsiques sest faite par la mthode de triangulation, qui
consiste mesurer les angles et quelques cts des triangles accols dont les sommets
sont les points godsiques.
La rsolution de ces triangles donne les positions relatives des sommets. Le problme
tant dimplanter sur le territoire un ensemble plus ou moins dense de points, on procde
par triangulations embotes (voir 5.2) ou ordres godsiques hirarchiss, respectant
ainsi le principe aller de lensemble au dtail . Cela permet dassurer une prcision
homogne entre les diffrents ordres de rseaux.
Fig. 2.39. : Triangulation de 1
er
ordre
Topographie et topomtrie - S. Milles, J. Lagofun
GODSIE, CARTOGRAPHIE 55
5.1 hIstorIg0e 4e Ia trIaa0IatIoa
1
Le but initial de la triangulation consiste connatre la forme et les dimensions de
lellipsode terrestre, puis dautres objectifs sont venus sy ajouter ; ainsi elle a servi :
G dossature la carte de France petite chelle ;
G de base ltablissement des plans cadastraux moyenne chelle ;
G de canevas pour les plans grande chelle tablis pour les grands travaux ;
G aux besoins militaires.
Lvolution a impos des plans des chelles de plus en plus grandes et donc des canevas
de plus en plus prcis :
G en 1792, Mchain (1744 1804) et Delambre (17491822) ont mesur larc de mri-
dien de Dunkerque Barcelone en vue de la dtermination de lunit de longueur.
Cette chane mridienne fut le point de dpart de la triangulation qui a servi de base
la carte dtat-major au 1/80 000 ;
G en 1873 dbutent les travaux de la Nouvelle Triangulation Franaise (NTF). Mais
il na pas t possible dutiliser les points de lancienne car la prcision sest avre
insuffisante, de nombreux points tant des pins, htres, rochers gravs, tours, dune
conservation douteuse. On a donc cherch constituer plusieurs ordres de triangula-
tion avec des vises suffisamment nombreuses situes dans les diffrents quadrants et
de longueur homogne. Les points ont t matrialiss par des bornes dimportance
plus ou moins grande selon lordre ;
G en 1991, anne de la dernire campagne de godsie classique de lIGN, la NTF a t
dclare acheve : elle stait rgulirement enrichie au fil des annes par densifica-
tion partir du rseau de 1
er
ordre jusqu atteindre une densit dun point pour 9
km
2
environ avec le 4
e
ordre. Ses 70 000 sites godsiques (sans compter les points
de 5
e
ordre) sont uniformment rpartis sur le territoire national avec une prcision
relative moyenne de lordre de 10
5
(cest--dire plusieurs centimtres au mieux par
rapport au point le plus proche).
G le nouveau systme godsique RGF 93 est en prparation (voir 5.3).
5.2 la ao0veIIe trIaa0IatIoa fraaaIse [8IF)
Un sicle aura donc t ncessaire llaboration de ce rseau (de 1873 1991). Il est
constitu :
G dun point fixe, le point godsique fondamental, qui est la croix du dme du
Panthon Paris dont on a dtermin avec le maximum de prcision les coordonnes
gographiques dduites de lobservatoire de Paris de coordonnes gographiques :
= 0,0106 93 gon ; = 54,273 618 gon
1
Consulter Mesurer la terre, J.-J. Levallois et al., Presses ENPC, 1988.
Topographie et topomtrie - S. Milles, J. Lagofun
56 GODSIE, CARTOGRAPHIE
On y a aussi mesur lazimut astronomique du ct de dpart de la triangulation.
En ce point, la normale lellipsode et la verticale qui est la normale au gode sont
confondues ; lellipsode Clarke 80 y est tangent au gode. Laltitude et la hauteur
ellipsodale sont gales.
G de 15 bases godsiques dune dizaine de km mesures au fil Invar (prcision 1 cm)
rparties tous les 250 300 km ; elles sont destines rajuster les dimensions des
triangles ;
G des stations de Laplace, servant rorienter les cts des triangles chaque base ;
par des vises astronomiques, on dtermine en ces points lazimut dun ct du
triangle.
5.2.1 saau da pramIar ordra
Il comprend les lments suivants :
G le 1
er
ordre de chane : trois chanes mridiennes ont t tablies (celle de Bordeaux,
celle de Lyon et celle de France qui passe par Paris) et trois chanes parallles, de
Paris, Lyon et Toulouse (voir carte figure 2.39.). Ce sont des chanes de triangles de
30 60 km de cts et, dans chaque quadrilatre form par deux triangles accols, on
dtermine lorientation de la deuxime diagonale ; ainsi, les mesures sont en sur-
nombre (huit angles par quadrilatre). Les angles sont mesurs avec seize ritrations.
Le 1
er
ordre de chane a t calcul sur lellipsode en coordonnes gographiques par
fractions insres entre deux bases (fig. 2.41.).
G le 1
er
ordre complmentaire, constitu par les points de 1
er
ordre compris dans les
mailles formes par les chanes mridiennes et parallles. Il est calcul dans le plan
de projection en coordonnes rectangulaires par blocs insrs entre les points prc-
demment dtermins. Les angles ont t mesurs au thodolite T3 (Leica) avec seize
Fig. 2.40. : Rattachement du Panthon et de la base de Paris la mridienne de France
Topographie et topomtrie - S. Milles, J. Lagofun
GODSIE, CARTOGRAPHIE 57
ritrations ; pour les rduire au plan de projection, on applique la correction de dv
(voir 3.4.3.2).
Les triangulations de 1
er
ordre sont orientes par des azimuts astronomiques (stations de
Laplace) et mises lchelle par des mesures de longueur. Les compensations ont t
faites par la mthode des moindres carrs (calculs en bloc).
Il y a environ 860 points, formant 1 700 triangles de 30 40 km de cts ; 5 000 directions
ont t observes. La prcision moyenne dune observation est de 2 dmgon, soit environ
13 cm 40 km. En rgle gnrale, on considre que les points de 1
er
ordre sont dter-
mins 10 cm prs, soit une prcision relative denviron 1/400 000 sur les cts.
Son manque de prcision tient plus la qualit non optimale des calculs : en effet le
rseau sappuie sur un calcul de la mridienne de France datant des annes 1930 et sur le
calcul du 1
er
ordre termin vers les annes soixante ; il ntait pas possible cette poque
de traiter la totalit des observations de 1
er
ordre, alors quaujourdhui il suffit de quel-
ques minutes pour traiter les observations des 6 200 points de 1
er
et 2
e
ordre de la NTF
grce linformatique.
Fig. 2.41. : Imbrication du 1
er
ordre et du 1
er
ordre complmentaire
Topographie et topomtrie - S. Milles, J. Lagofun
58 GODSIE, CARTOGRAPHIE
5.2.2 saaux da dIaII
Pour atteindre la densit requise tout en maintenant le prcision relative du 1
er
ordre, on
tablit successivement les rseaux embots suivants (fig. 2.42.) :
G triangles de 2
e
ordre dont les cts mesurent 12 15 km environ : appuys sur les
points du 1
er
ordre, ils sont calculs par blocs dune dizaine de points ;
G triangles de 3
e
ordre dont les cts mesurent 8 12 km environ : appuys sur les ordres
suprieurs, ils sont calculs comme ceux du 2
e
ordre ;
G triangles de 4
e
ordre dont les cts mesurent 3 4 km environ : ces points sont
gnralement calculs en points isols partir de vises de 3 6 km.
Dans chaque triangle dun ordre donn, il y a environ trois points de lordre immdiate-
ment infrieur.
Les angles ont t mesurs au thodolite T3 (Wild) avec huit ritrations pour le 2
e
ordre
et au thodolite T2 (Wild) avec quatre ritrations pour les 3
e
et 4
e
ordres. Pour les 2
e
et
3
e
ordres, les vises ont gnralement t observes dans les deux sens, ce qui permet de
fermer les triangles et de dceler ainsi les anomalies. Les compensations sont faites par
la mthode des moindres carrs par groupe de deux dix points.
5.2.3 saau da rInquIma ordra ou IrIanguIaIIon
rompImanIaIra
La densit du 4
e
ordre est insuffisante pour rattacher directement les cheminements
topographiques. Dans certaines zones, on a donc tabli une triangulation complmen-
taire. Chaque dtermination a t faite en gnral par relvement (voir tome 2 chap. 1
6 et 7) avec deux ritrations au thodolite T2. Le Tableau suivant rcapitule les ordres
de triangulation.
Fig. 2.42. : Imbrication des rseaux
Topographie et topomtrie - S. Milles, J. Lagofun
GODSIE, CARTOGRAPHIE 59
5.2.4 MaIrIaIIsaIIon das poInIs godsIquas
5.2.4.1 8arae gaJslque
Une borne est un bloc solide en granit dont la partie mergeant du sol est un cube de 15
cm darte. La face suprieure horizontale porte une croix grave matrialisant le repre
suprieur.
La borne repose sur une dalle. La
borne et la dalle sont prises dans
un bloc de bton. Sous celui-ci,
spar de lui par une couche de
terre meuble, est coul un bloc
de bton dans lequel est mnag
un orifice circulaire au fond
duquel se trouve un repre
mtallique infrieur recouvert de
charbon de bois. La borne est
place de sorte que le repre
suprieur et le repre infrieur
soient laplomb lun de lautre.
La profondeur de lensemble est environ 0,80 m, et le poids du bloc de granit est de
lordre dune tonne.
5.2.4.2 Mlre gaJslque
Cest un ensemble de panneaux de forme gomtrique, en bois ou en mtal, ayant un axe
vertical centr au-dessus dune borne ou dun rivet (en montagne). Les mires godsi-
ques permettent lobservation loigne de ces points. Les mires mtalliques sont dmon-
tables. La hauteur des panneaux et la disposition des montants permettent de mettre un
appareil en station sous la mire (fig. 2.44-a.).
Structure 0rdre Lspocement Nombre rc|s|on
kseou pr|nc|po|
1
AH
30 |m 800 10
a#
2
A
10 |m 5 000 10
a#
3
A
c| =
A
3 |m 0 000 10
a#
kseou comp|mento|re 5
A
20 000 d|csc
Fig. 2.43. : Borne godsique
Topographie et topomtrie - S. Milles, J. Lagofun
60 GODSIE, CARTOGRAPHIE
5.2.4.3 5lgaal
Le signal est une construction ayant un axe de symtrie vertical situ au-dessus dun
repre et permettant lobservation loigne de celui-ci. Le signal est en gnral god-
sique : chemine, pylne etc. ; il est souvent prenne alors que les mires godsiques sont
provisoires.
Par extension est englob sous ce terme toute construction pouvant tre observe :
chemines, pylnes, mires godsiques, balises.
5.2.5 parIoIras da I'Ih
LInstitut gographique national publie pour chaque feuille au 1/50 000 un rpertoire
comprenant :
G une rduction de cette feuille sur format A4 avec lemplacement de chaque point
godsique et son numro dordre dans la feuille ;
G la fiche signaltique de chaque point : cest un document darchives et de diffusion
qui contient :
G des renseignements dordre administratif : nom du point, nom et numro de la feuille
au 1/50 000, dpartement, numro de larrt de servitude, renseignements
cadastraux ;
G des renseignements dordre technique : dsignation du type de borne et des repres
auxiliaires, indication dun point naturel connu pouvant servir dorientation sur un
point inconnu, situation topographique, plan des environs, croquis de reprage, nature
et date de la mission et les coordonnes planimtriques X, Y (E, N) centimtriques.
Laltitude H est dtermine par nivellement indirect godsique (chap. 6, 2) avec une
prcision dcimtrique.
Fig. 2.44-a. : Mires godsiques
Topographie et topomtrie - S. Milles, J. Lagofun
80 GODSIE, CARTOGRAPHIE
6.7 les reres 4e aIveIIemeat
Les altitudes des repres obtenues grce des tra-
vaux coteux doivent tre conserves avec le plus
de scurit possible. Les repres ont d tre placs
sur des difices publics : mairies, glises, gares, sur
des ponts et, dfaut, sur des immeubles privs (ci-
contre un repre IGN scell sur le mur de lglise
Sainte-Thrse dAntibes ; diamtre rel : 75 mm).
Lorsquun repre disparat, il est trs facile de le
rtablir partir des points les plus proches. Les
travaux sont moins importants que pour un point de
triangulation.
Ci-dessous (fig. 2.53.), sont les repres du service
du nivellement gnral de la France.
Ces repres sont nomms par leur initiale : M pour Mdaillon (ou Macaron), B pour
Bourdaloue, R pour Rivet, C pour Console.
6.8 8ertoIres 4e aIveIIemeat
LIGN publie un extrait de carte au 1/50 000 accompagn dun calque superposable
comportant le trac des cheminements et lindication des diffrents repres avec leur
numro ; puis sont fournis les rpertoires de tous les points des 1
er
, 2
e
, 3
e
et 4
e
ordre.
Sur la plupart des fiches des repres (celles tablies avant 1969), les altitudes dites
orthomtriques sont rayes mais laisses lisibles (voir fig 2.54.) ; elles sont encore
utilises car tous les nivellements tablis avant 1969 sont rattachs ce systme dalti-
tude. Les nouvelles altitudes, dites normales, sont indiques en dessous.
Fig. 2.52-a. : Repre de nivellement
Fig. 2.53. : Repres du nivellement gnral
Topographie et topomtrie - S. Milles, J. Lagofun
GODSIE, CARTOGRAPHIE 81
La mention altitude normale est porte sur les fiches didentification des repres de
nivellement IGN 69.
Remarque
Un service minitel de lIGN (08 36 29 01 29 9,21F/minute au 1/1/98) permet
daccder des fiches informatises. La recherche seffectue soit par commune soit par
centrode (recherche des repres les plus proches dun point de coordonnes Lambert
donnes : les recherches seffectuent dans un rayon de trois kilomtres autour du point
donn).
En 1997, lIGN a vrifi ou rfectionn les repres de nivellement implants le long de
4948 km de routes ou voies ferres dans le centre de la France, en Normandie et en
Bretagne. La documentation relative environ 23 000 repres a t intgre dans la
base de donnes, ce qui porte 382 000 le nombre de repres accessibles par minitel
(laccs par internet nest pas encore possible ce jour).
6.9 FrcIsIoa
Les mesures ont t conduites pour assurer la meilleure prcision possible lensemble
du rseau.
0rdre
Lrreur probob|e
k||omtr|que (mm)
cort type
en mm](km)
*
Io|ronce en mm](km)
*
1
AH
1,3 2 5,2
2
A
1,5 2,3
3
A
2 3 8
4
A
2,= 3, 9,
Fig. 2.54. : Extrait de rpertoire de points de nivellement
Topographie et topomtrie - S. Milles, J. Lagofun
82 GODSIE, CARTOGRAPHIE
Pour une distance D exprime en km entre deux repres, lcart type de mesure vaut :
G premier
ordre mm,
G deuxime
ordre mm,
G troisime
ordre mm,
G quatrime
ordre mm.
2 D ( )
2 3 D , ( )
3 D ( )
3 6 D , ( )
Topographie et topomtrie - S. Milles, J. Lagofun
OUTILS MATHMATIQUES 293
Dessinez D
3
parallle la droite D
1
: COPIER <choix des objets> cliquez sur la droite
puis validez (), du point MILieu de... au point A EXTrmit de...
Pour obtenir les valeurs de a et b, voir le premier exemple.
10 l8 k86l8 : 08II8 I 00888I088
10.1 0fIaItIoas
10.1.1 La radIan (rad)
C'est l'angle au centre interceptant sur le cercle un arc de
longueur gale son rayon (fig. 5.65.).
Un angle de
rad
intercepte donc une longueur de R .
rad
sur le
cercle.
Le primtre d'un cercle de rayon R est gal 2..R.
La constante peut tre calcule ainsi :
tan( / 4) = 1 do = 4 . arctan (1) = 3,14159...
Calculez au millimtre prs la longueur de larc dun demi-cercle de rayon 10 m.
L = . 10 = 31,416 m.
10.1.2 La dagr (dag ou )
C'est la 360
e
partie du cercle. Il est gnralement exprim en degrs dcimaux
(121,636). On peut aussi lexprimer en degrs sexagsimaux dont les sous-multiples
sont :
Fig. 5.64. : Droite parallle et droite perpendiculaire une autre droite
Fig. 5.65. : Le radian
Application
Rponse
Topographie et topomtrie - S. Milles, J. Lagofun
294 OUTILS MATHMATIQUES
G la minute sexagsimale : 1' vaut 1/60
G la seconde sexagsimale : 1'' vaut 1/60
e
de minute soit 1 / 3 600
1 - Transformez 121,636 en degrs-minutes-secondes (la plupart des calculatrices
permettent de le faire directement au moyen dune fonction pr-programme).
2 - Transformez 35 12' 28" en degrs dcimaux.
3 - Combien mesure un mile marin sachant quil intercepte un arc de mridien de 1' ?
1 - 0,636 sont 0,636 . 60 = 38,16 minutes et 0,16 minutes sont
0,16 . 60 = 9,6 secondes ;
la rponse est donc : 121 38' 10''.
2 - 35 + 12 / 60 + 28 / 3 600 35,208.
3 - Avec un rayon moyen de R = 6 367 km, 1 mile = 6 367 * 2./360/60 = 1,852 km.
10.1.3 La grada (symboIa . gon)
Le terme grade reprsente lunit, gon est sa notation ; c'est par dfinition la 400
e
partie du cercle. Cest lunit usuelle du topographe.
On utilise aussi souvent les sous-multiples du grade, savoir : dcigrade (dgon), centi-
grade (cgon), milligrade (mgon), dcimilligrade (dmgon).
Un cgon est aussi une minute centsimale (1/100
e
de grade), note `.
Un dmgon est aussi une seconde centsimale (1/10 000
e
de grade), note ``.
Attention : ne pas confondre la notation des minutes ou secondes sexagsimales (' et '')
avec la notation des minutes ou secondes centsimales (` et `` : lorientation des apostro-
phes est inverse). Ces notations sont dailleurs viter absolument pour ne garder que
les sous-multiples du grade.
10.2 0oaversIoas
Elles sont faites par rgle de trois partir des galits suivantes : 2
rad
= 360 = 400 gon
1 - Convertissez 96 18' 46'' en grade puis en radian.
2 - Sur la documentation Leica du T2, on lit : cart type = 0,8'' ; traduisez en gon.
1 - 96 + 18/60 + 46/3 600 = 96,313 . 400 / 360 = 107,014 gon . / 200 = 1,681 rad.
2 - 0,8 / 60 / 60 * 400 / 360 = 0,00025 gon, soit 2,5 dmgon.
Application
Rponses
Application
Rponses
Topographie et topomtrie - S. Milles, J. Lagofun
OUTILS MATHMATIQUES 295
10.3 0r4res 4e raa4e0r
Il est bon de connatre les quelques ordres de grandeur suivants pour apprcier la
prcision des mesures angulaires ralises sur le terrain avec les diffrents appareils de
topographie. Certains thodolites permettent dapprcier le dmgon.
Pour un angle petit et exprim en radian, on peut crire : sin et cos 1.
Exemples : sin(0,1rad) = 0,0998; sin(0,2rad) = 0,197
cos(0,1rad) = 0,0995; cos(0,2rad) = 0,980
Comme 1 gon 1/64 rad, cela entrane quun cart dangle de 1 gon une distance de
64 m donne 1 m en bout de vise.
De mme, on a : 1 cgon 1/6 400 rad 1 cgon 64 m donne 1 cm
1 mgon 1/64 000 rad 1 mgon 64 m donne 1 mm
1 dmgon 1/640 000 rad 1 dmgon 64 m donne 1/10 mm
10.4 0aractrIstIg0es 4'0ae vIse
10.4.1 8ansIbIIII d'una vIsa
Note s, cest le dplacement de lextrmit de la vise
pour une variation d'angle de 1 dmgon. La sensibilit s est
proportionnelle la porte de la vise, cest--dire :
s est exprime en centimtre par dcimilligrade.
Soit, en simplifiant :
En changeant dunit pour les angles, on obtient :
10.4.2 pIaramanI d'una vIsa
Cest la valeur du dplacement de lextrmit de la vise pour une variation d'angle
dmgon
.
s
cm/dmgon
0,157. D
km
s
cm/mgon
1,57. D
km
d
cm
= s
cm/dmgon
.
dmgon
Fig. 5.66. : Sensibilit
dune vise
s
cm/dmgon
100 000 D
km
200
---------
1
10 000
---------------- =
Topographie et topomtrie - S. Milles, J. Lagofun
238 OUTILS MATHMATIQUES
performants crits par des professionnels : il est prfrable de se contenter den
tre de bons utilisateurs. De plus, dans un but rel de programmation, il existe
aujourdhui dautres langages plus performants et conviviaux comme le langage
Visual-Basic, le langage C, etc.
Remarque
Il existe des outils informatiques qui permettent tous de calculer littralement les plus
complexes des intgrales ou drives, de rsoudre numriquement toutes les quations
possibles imaginables, partir dune interface graphique simple et conviviale. Le
logiciel MATHCAD en est un exemple.
2 I8I6080MI8I
Ce paragraphe rappelle lessentiel des relations trigonomtriques utiles au topographe.
2.1 0ercIe trIoaomtrIg0e
Le cercle trigonomtrique ci-contre
(fig. 5.1-c.) est de rayon 1, cest--
dire : R = OM = 1.
En mathmatique, le sens de rotation
positif est dit trigonomtrique et cor-
respond au sens de rotation inverse
horaire. Les angles sont exprims en
radians.
Par dfinition, le cosinus de langle
est la projection sur laxe des abs-
cisses x de lextrmit du vecteur
, le sinus tant la projection sur
laxe des ordonnes y :
ullllsallaa ea laagrakle
Ces relations servent calculer les lments dun triangle rectangle, par exemple le
triangle OMA ou le triangle OMB de la figure 5.1-c. dont on connat au moins deux
cos = X
M
, et sin = Y
M
On dfinit ensuite :
, et
Fig. 5.1-c. : Cercle trigonomtrique
OM
tan
sin
cos
------------ = cotan
cos
sin
------------
1
tan
------------ = =
Topographie et topomtrie - S. Milles, J. Lagofun
OUTILS MATHMATIQUES 239
donnes : une longueur et un angle, ou bien deux longueurs. La connaissance de deux
angles est insuffisante car il y a alors une infinit de solutions (voir paragraphe 3.3.4.).
On identifie les sinus, cosinus, tangente et cotan-
gente de la manire suivante (fig. 5.2.) :
Remarques
G La cotangente est linverse de la tangente
. Son seul intrt est la
simplification de certaines formules littrales. Pour les calculs, la seule connais-
sance de la tangente est suffisante.
G Sur la calculatrice, la fonction cotangente napparat gnralement pas et sobtient
par 1/tan, soit la combinaison de la fonction tangente suivie de la fonction 1/x et
surtout pas tan
1
( ) qui est la fonction rciproque de tan.
G Attention donc ne pas confondre sur votre calculatrice la fonction tan
1
( ) avec
la fonction cotangente (1 / tangente) ; tan
1
( ) reprsente la fonction (arc tangente)
rciproque de (tangente) qui permet dextraire langle dont la tangente prend une
certaine valeur X : tan
1
X = donc X = tan, avec gon.
Nous reviendrons au paragraphe 1.3. sur le fait que la solution de tan
1
X = ne donne
que la racine comprise entre 100 et 100 gon. Il en est de mme pour sin
1
X = (voir
paragraphe 3.3.5.).
Trouvez graphiquement sur le cercle trigonomtrique puis vrifiez sur votre calcula-
trice que langle dont la tangente a pour valeur 1 est 50 gon.
2.2 8eIatIoas trIoaomtrIg0es 4e hase
Les relations suivantes sont utiles au droulement de certains calculs littraux :
Voir fig. 5.3.
Fig. 5.2. : Triangle rectangle
sin
ct oppos langle
hypothnuse
--------------------------------------------------------
MB
OM
--------- = =
cos
ct adjacent langle
hypothnuse
-----------------------------------------------------------
OB
OM
--------- = =
tan
ct oppos langle
ct adjacent langle
-----------------------------------------------------------
MB
OB
--------- = =
cotan
1
tan
------------ =
X ] 100,100[
Application
cos
2
sin
2
+ 1 =
( ) cos cos =
( ) sin sin =
Topographie et topomtrie - S. Milles, J. Lagofun
240 OUTILS MATHMATIQUES
1 - Donnez une expression simplifie de
tan(a + b) en fonction de tana et tanb.
2 - Exprimez sin(a b) et cos(a b).
3 - Exprimez sin(2.a) et cos(2.a).
1 -
2 - cos(a b) = cosa . cosb + sina . sinb et
sin(a b) = sina . cosb sinb. cosa
3 - cos(2 . a) = 2 . cos
2
a 1 = 1 2 . sin
2
a et
sin(2 . a) = 2 . sina . cosa
2.3 I4eatIts remarg0ahIes
La figure 5.4. permet de retrouver les identits remarquables suivantes : on y reprsente
un point M sur le cercle trigonomtrique et sa projection sur les axes des sinus et cosinus,
correspondant langle .
A partir de l, par symtries horizontales et verticales, on construit les projections corres-
pondantes aux angles 100 , 100 + , 200 , 200 + , 300 , 300 + , et .
sin( )= sin
cos( )= cos
Donc : tan() = tan
et cotan() = cotan
sin(100 ) = cos
cos(100 ) = sin
sin( +100) = cos
cos( +100) = sin
sin(200 ) = sin
cos(200 ) = cos
sin( + 200) = sin
cos( + 200) = cos
sin(300 ) = cos
cos(300 ) = sin
sin(300 + ) = cos
cos(300 + ) = sin
Fig. 5.3. : Relations trigonomtriques
a b + ( ) cos a cos b cos a sin b sin =
a b + ( ) sin a sin b cos b sin + a cos =
Application
Rponse
a b + ( ) tan
a tan b tan +
1 a tan b tan
----------------------------------
a b + ( ) sin
a b + ( ) cos
------------------------ = =
Fig. 5.4. : Identits remarquables
Topographie et topomtrie - S. Milles, J. Lagofun
246 OUTILS MATHMATIQUES
Dans les triangles semblables ST
1
O et ST
1
O, on peut crire : .
Comme , on peut dire
que les segments [OP] et [OP] sont parallles : on dit que le cercle (C) est homothtique
du cercle (C), homothtie de centre S.
On en dduit R = ST
1
. tan , SO = ST
1
/ cos et tel que tan = .
Il reste rsoudre le triangle SPO dont on connat un angle et deux cts (voir 4.3.5.).
Cet exercice est rsolu laide dune autre mthode au paragraphe 5.6. du chapitre 4.
4 8lkII088 0k88 l8 I8Ik86l8
4.1 8eIatIoas 4e hase
Seules les plus utilises sont tudies.
La notation ci-contre (fig. 5.12.) est tou-
jours respecte : le ct de longueur a est
oppos langle , b oppos langle
et c langle .
4.1.1 8omma das angIas
InIarnas
4.1.2 aIaIIon das sInus
Soit le triangle ABC ci-dessus (fig. 5.12.)
inscrit dans le cercle de centre O et de rayon R. Si lon fait intervenir le triangle ABM tel
que la droite AM passe par le centre O du cercle, on retrouve en M langle puisque les
angles et interceptent la mme corde AB (voir 3.3.2.).
De plus, langle est gal 100 gon (cest le cas particulier du paragraphe 3.3.2. o
langle est gal 100 gon).
SO
SO
---------
ST
1
ST
1
-----------
R
R
----- = =
SPO ( ) sin
PSO ( ) sin
R
----------------------- SO
PSO ( ) sin
R
----------------------- SO SPO ( ) sin = = =
2
---
2
---
T
1
P
ST
1
-----------
Fig. 5.12. : Relation des sinus
A B
C
A B C + + 200 gon =
C
ACB ABM
ABM
Topographie et topomtrie - S. Milles, J. Lagofun
OUTILS MATHMATIQUES 247
Donc dans le triangle rectangle ABM, on a .
Le cercle de rayon R est appel cercle circonscrit au triangle ABC.
4.1.3 aIaIIon das rosInus
Dans le mme triangle ABC (fig. 5.13.), si
lon trace la perpendiculaire AB passant
par C (hauteur), on peut crire :
De mme, sur les autres cts, on obtient :
4.1.4 Thorma da FyIhagora gnraIIs
Dans le triangle ABC (fig. 5.14.), on peut crire la
relation vectorielle suivante : .
Si lon en fait le produit scalaire membre membre,
on obtient : .
En distribuant, il vient :
.
En crivant le produit scalaire, il vient :
Cette relation peut se dmontrer pour chaque ct du
triangle et comme la quantit 2R est une constante,
on en dduit la relation des sinus exprime ci-
contre :
On obtient finalement :
On dmontre de mme que :
sinC
c
2R
------- =
2R
a
A sin
-----------
b
B sin
-----------
c
C sin
----------- = = =
Fig. 5.13. : Relation des cosinus
c a B cos b + A cos =
b c A cos a + C cos =
a b C cos c + B cos =
Fig. 5.14. : Pythagore
AC AB BC + =
AC AC AB BC + ( ) AB BC + ( ) =
AC
2
AB
2
2AB + BC BC
2
+ =
AB BC AB BC AB BC ( ) cos AB BC 200 B ( ) cos AB BC B cos = = =
b
2
a
2
c
2
2ac + B cos =
c
2
b
2
a
2
2ba + C cos =
a
2
c
2
b
2
2cb + A cos =
Topographie et topomtrie - S. Milles, J. Lagofun
256 OUTILS MATHMATIQUES
4.3.7 FrogrammaIIon an basIr sIandard
da Ia rsoIuIIon da IrIangIas
Le programme suivant regroupe les quatre cas de figure possibles de la rsolu-
tion d'un triangle. Il est donn en BASIC standard (avec les numros de ligne)
pour tre adapt aux calculatrices programmables.
Trois donnes sont ncessaires. Les variables contenant les angles sont notes AA, AB
et AC. Celles qui contiennent les cots sont notes CA, CB, CC. Par convention, le ct
CA est oppos langle AA.
1 PRINT "Rsolution de triangles"
2 INPUT "(1)ABc (2)abc (3)abC (4)abA"; NU
3 ON NU GOTO 10, 100, 200, 300
4 END
5 REM On connat un ct et deux angles adjacents
10 INPUT "Ct c (m) "; CC
20 INPUT "Angle A (gon)"; AA
30 INPUT "Angle B (gon) "; AB
40 AC = 200 AA AB : REM Calcul direct de l'angle C
50 CB = CC / SIN(AC) * SIN(AB) : REMCalcul direct du ct b
60 CA = CC / SIN(AC) * SIN(AA) : REM Calcul direct du ct a
80 PRINT "Angle C : "; AC ;"gon" : REMAffichage des rsultats
90 PRINT "Ct b : ";CB; " m"
95 PRINT "Ct a : ";CA; " m" : END
99 REM Trois cots connus
100 INPUT "Ct a (m) "; CA
120 INPUT "Ct b (m) "; CB
130 INPUT "Ct c (m) "; CC
140 AA = ARCCOS((CC^2+CB^2CA^2)/(2*CC*CB))
145 IF AA < 0 THEN AA=AA+200 : REM si A ngatif, ajouter 200 gon
150 AB = ARCCOS((CA^2+CC^2CB^2)/(2*CA*CC))
160 IF AB < 0 THEN AB=AB+200 : REM si B ngatif ajouter 200 gon
180 PRINT "Angle A : "; AA ;"gon"
190 PRINT "Angle B : "; AB ;"gon"
195 PRINT "Angle C : "; 200 AA AB ;"gon" : END
199 REM un angle et deux cts adjacents connus
200 INPUT "Longueur du ct a (m) "; CA
220 INPUT "Longueur du ct b (m) "; CB
230 INPUT "Angle C (gon) "; AC
240 CC = SQR(CA^2+CB^22*CA*CB*COS(AC))
250 AB = ARCCOS((CA^2+CC^2CB^2)/(2*CA*CC))
260 IF AB < 0 THEN AB=AB+200 : REM si B ngatif, ajouter 200 gon
Topographie et topomtrie - S. Milles, J. Lagofun
OUTILS MATHMATIQUES 257
280 PRINT "Angle A : "; 200 AB AC ;"gon"
290 PRINT "Angle B : "; AB ;"gon"
295 PRINT "Ct c : "; CC ;"m" : END
299 REM On connat un angle, le ct oppos et un autre ct
300 INPUT "Longueur du ct a (m) "; CA
320 INPUT "Longueur du ct b (m) "; CB
330 INPUT "Angle A (gon) "; AA
340 IF CA<CB*SIN(AA) THEN GOTO 390 : REM Cas sans solution (aller en 390)
345 IF CA=CB*SIN(AA) AND AA>=100 THEN GOTO 390
350 IF CA>CB*SIN(AA) AND AA>100 AND CA<=CB THEN GOTO 390
355 AB = ARCSIN(CB*SIN(AA)/CA) : AC = 200 AA AB
360 PRINT "Solution 1" : PRINT "Angle B (gon) ";AB
363 PRINT "Angle C (gon) ";AC
364 PRINT "Ct c (m) ";SIN(AC)*CA/SIN(AA)
365 IF CA>CB*SIN(AA) AND AA<100 AND CA<CB THEN GOTO 375
370 PRINT "Solution unique" : END : REM Fin du cas une seule solution
375 PRINT "Solution 2" : REM Dbut du calcul de la 2
e
solution
380 PRINT "Angle B' (gon) "; 200AB
381 PRINT "Angle C' (gon) ";AB AA
385 PRINT "Ct c' (m) ";SIN(ABAA)*CA/SIN(AA) : END
390 PRINT "Pas de solution" : END
Ce programme est donn sur le cdrom du livre sous forme de fichier
(TRIANGLE.BAS) lisible par le programme QBASIC.EXE livr avec le DOS ( partir
de la version 5.0). Le listing est dans le fichier TRIANGLE.TXT.
Remarques
G Le listing ci-dessus est donn pour une calculatrice programmable en BASIC stan-
dard et rgle en mode grades. Le listing du programme TRIANGLE.BAS (sur le
cdrom) fait apparatre des conversions dangles de radians en grades (et inverse-
ment) puisque lordinateur travaille en radian.
G Le listing ci-dessus suppose que votre Basic dispose des deux fonctions arccos( ) et
arcsin( ). Si ce nest pas le cas, vous disposez dau moins lune dentre elles, par
exemple arcsin( ), et vous obtiendrez lautre grce la transformation suivante :
ALPHA = arcsin(SQR(1 COSINUS ^2)). Cette expression permet de mettre dans
la variable alpha la valeur de langle dont le cosinus est stock dans la variable
cosinus. Elle remplace donc la fonction arccos( ). Alpha est donn en grades si la
machine est rgle en mode grades lors de lexcution du programme. Par exemple,
la ligne 250 du programme ci-dessus deviendrait :
250 AB = ARCSIN(SQR (1 ((CA^2+CC^2CB^2)/(2*CA*CC))^2 ))
Topographie et topomtrie - S. Milles, J. Lagofun
OUTILS MATHMATIQUES 277
8 8I8IM8 0 000800888
80Ik860lkI88 I F0lkI88
8.1 IraasformatIoa 4e coor4oaaes 4'0a systme a I'a0tre
8.1.1 TransIormaIIon da roordonnas rarIsIannas
an roordonnas poIaIras maIhmaIIquas
Le point M (fig. 5.50.) est repr par ses coordonnes
cartsiennes (ou rectangulaires) : M (X
M
, Y
M
).
Les coordonnes polaires mathmatiques sont, dans
l'ordre, le rayon polaire r et langle polaire : M (r , ).
En convention polaire mathmatique, les angles tournent
positivement en sens trigonomtrique (inverse horaire) ;
leur zro est sur laxe des abscisses et ils sont gnrale-
ment exprims en radians, unit du systme international.
Les formules de transformation sont les suivantes :
La plupart des calculatrices possdent cette transformation sous forme de fonc-
tion prprogramme. Par exemple, sur FX850, tapez POL( X , Y ) puis [EXE] ;
la calculatrice affiche alors r ; tapez ensuite [Y] [EXE], elle affiche dans
lunit dans laquelle elle est rgle au moment du calcul (degr, grade ou
radian).
Sur une calculatrice FX850P, tapez REC( r , ) puis [EXE] ; la calculatrice
affiche X. Ensuite [Y] [EXE] donne Y.
Transformez M(102,32 m ; 98,55 m) en coordonnes polaires mathmatiques avec un
angle en degrs : vous devez trouver le point N de lexercice suivant.
Transformez N(142,06 m ; 0,7666 rad) en coordonnes cartsiennes : on retrouve M.
on voit sur la figure 5.50. que
Les formules de transformation inverse sont :
Fig. 5.50. : Coordonnes
cartsiennes et polaires
r X
M
2
Y
M
2
+ =
tan
Y
M
X
M
------- =
X
M
r cos =
Y
M
r sin =
Applications
Topographie et topomtrie - S. Milles, J. Lagofun
278 OUTILS MATHMATIQUES
8.1.2 TransIormaIIon da roordonnas rarIsIannas
an roordonnas poIaIras IopographIquas
Le point M (fig. 5.51.) est repr par ses coordonnes
cartsiennes (ou rectangulaires) : M (X
M
, Y
M
).
Les coordonnes polaires topographiques sont la distance
horizontale Dh et le gisement G : M (Dh , G).
En convention polaire topographique, les angles tournent
positivement en sens horaire ; leur zro est sur laxe des
ordonnes et ils sont toujours exprims en grades (sym-
bole gon) : cela vient des choix technologiques sur les
appareils de topomtrie.
Les formules de transformation sont les suivantes :
On peut utiliser une fonction de la calculatrice : il suffit dinverser les donnes
X et Y pour obtenir le rsultat en convention topographique. Sur CASIO FX
850P, taper POL( Y , X ) puis [EXE] ; la calculatrice affiche alors Dh ; tapez
ensuite [Y] [EXE], elle affiche G. Si ce dernier est ngatif, ajouter 400 gon pour
obtenir le gisement dfinitif.
Les formules de transformation inverse sont :
Sur calculatrice FX850, tapez REC( Dh , G) puis [EXE] ; attention : la calculatrice
affiche dabord Y puis tapez [Y] [EXE] pour obtenir X.
Transformez M(102,32 m ; 98,55 m) en coordonnes polaires topographiques : vous
devez retrouver le point N de lexercice suivant.
Transformez N(142,06 m ; 51,195 gon) en coordonnes cartsiennes : on retrouve M.
on voit sur la figure 5.51. que
X
M
= Dh . sinG
Y
M
= Dh . cosG
Fig. 5.51. : Coordonnes
polaires topographiques
Dh X
M
2
Y
M
2
+ =
G tan
X
M
Y
M
------- =
Applications
Topographie et topomtrie - S. Milles, J. Lagofun
OUTILS MATHMATIQUES 279
8.2 0haaemeat 4e rere
8.2.1 TransIaIIon da rapra
Soit un point M dont les coordonnes (X
M
, Y
M
) sont
connues dans un repre R(O, x, y) (fig. 5.52.).
On veut connatre les nouvelles coordonnes de M
dans le repre R(O, x, y) dduit de R(O, x, y) par
translation de vecteur de coordonnes (X
O
,
Y
O
), qui sont les coordonnes de la nouvelle ori-
gine O dans lancien repre R(O, x, y). Les nou-
velles coordonnes de M dans R (O, x, y) sont :
Dmonstration
Les nouvelles coordonnes de M dans R(O, x, y) sont reprsentes par le vecteur :
donc :
8.2.2 oIaIIon da rapra
Soit un point M dont les coordonnes (X
M
, Y
M
)
sont connues dans un repre R(O, x, y) (fig. 5.53.)
On veut connatre les nouvelles coordonnes de
M(X
M
; Y
M
) dans le repre R(O, x, y) dduit de
R(O, x, y) par rotation dangle . Les nouvelles
coordonnes de M dans R (O, x, y) sont :
Remarque
La formule ci-dessus nest valable quen
conventions mathmatiques, cest--dire sens
de rotation trigonomtrique et zro des angles sur laxe des x. Il faut conserver le signe
de langle de rotation.
M X
M
X
O
Y
M
Y
O
M X
M
= X
M
.cos + Y
M
.sin
Y
M
= X
M
.sin + Y
M
.cos
Fig. 5.52. : Translation de repre
OO
OM
OM OO OM + OM OO = =
X
M
X
M
X
O
=
Y
M
Y
M
Y
O
=
'
Fig. 5.53. : Rotation de repre
Topographie et topomtrie - S. Milles, J. Lagofun
280 OUTILS MATHMATIQUES
Dmonstration
On obtient directement les quations
dmontrer en projetant les coordonnes X et
Y sur les axes x et y du nouveau repre
(fig. 5.54. ).
Soit un point M de coordonnes (110,12 m ;
78,77 m) dans un repre R (O, x, y). Cal-
culez les nouvelles coordonnes du point M
aprs rotation de repre de 18,767 gon et
translation de vecteur ( 3,14 m ; 9,8 m) ;
est donn dans R(O, x, y).
Les coordonnes sont M( 88,36 ; 98,82) (voir les explication au paragraphe suivant).
8.2.3 6hangamanI da rapra . IransIaIIon puIs roIaIIon
Attention : le rsultat du calcul dpend de
lordre dans lequel sont effectues les trans-
formations. Lordre correct dpend du repre
dans lequel est exprim le vecteur de transla-
tion . Un mauvais choix peut amener une
erreur (voir lexercice prcdent).
En effet, si lon commence par la rotation
pour passer de R(O, x, y) R(O, x, y), au
moment deffectuer la translation pour passer
au repre R(O, x, y), il faut que le vecteur
de translation soit donn dans le repre
intermdiaire R(O, x, y) qui a subi une
premire rotation.
Si lon commence par la translation, ce problme ne se pose pas puisque le vecteur de
translation est exprim dans le repre de dpart dans lequel on effectue cette translation
R(O, x, y). Reprenons lexemple du paragraphe prcdent.
En commenant par la rotation dangle ( 18,767 gon), les coordonnes du point M
deviennent (82,48 ; 107,37) dans le repre R(O, x, y).
Fig. 5.54. : Dmonstration
Application
V
V
Rponse
Fig. 5.55. : Changement de repre
V
Topographie et topomtrie - S. Milles, J. Lagofun
OUTILS MATHMATIQUES 281
Le vecteur de translation devient dans le repre intermdiaire R(O, x, y) :
x = 3,14 . cos( 18,767) + 9,88 . sin( 18,767) = 5,88
y = 3,14 . sin( 18,767) + 9,88 . cos( 18,767) = 8,54
On retrouve, aux arrondis de calcul prs, le point M (88,36 ; 98,82).
La notation matricielle (voir 8.3.) donne : .
Cette notation, plus facile mmoriser, fait apparatre la matrice de rotation dangle .
8.2.4 6hangamanI da rapra . roIaIIon puIs IransIaIIon
En topographie, ce problme se pose gnrale-
ment lorsque lon souhaite passer dun repre
local (O, x, y) un repre gnral (O, X, Y)
(fig. 5.56.) : le point M(x
M;
y
M
) est connu en
repre local et on veut obtenir ses coordonnes
(X
M
; Y
M
) en repre gnral.
On connat les coordonnes dans le repre
gnral de lorigine O(X
O
; Y
O
) du repre local
ainsi que le gisement G de laxe des ordonnes du
repre local dans le repre gnral.
Dans une premier temps, on effectue une rotation
de repre dangle G = . Puis on effectue une
translation de vecteur OO connu dans le repre (O, X, Y), donc :
La notation matricielle (voir 8.3.) donne : .
8.2.5 FrogrammaIIon an basIr sIandard
5 PRINT "Translation puis rotation de repre"
10 INPUT "Angle de rotation (sens trigo, gon) :" ; A
20 PRINT "Coordonnes actuelles de la nouvelle origine :"
Dans ce cas, la formule gnrale est :
M X
M
= (X
M
X
O
).cos + (Y
M
Y
O
).sin
Y
M
= (X
M
X
O
).sin + (Y
M
Y
O
).cos
M X
M
= X
O
+ x
M
. cosG y
M
. sinG
Y
M
= Y
O
+ x
M
. sinG + y
M
. cosG
M
X
M
Y
M
,
_
cos sin
sin cos
,
_ X
M
X
O
Y
M
Y
O
,
_
=
Fig. 5.56. : Changement de repre
M
X
M
Y
M
,
_
X
O
Y
O
,
_
G cos G sin
G sin G cos
,
_
x
M
y
M
,
_
+ =
Topographie et topomtrie - S. Milles, J. Lagofun
282 OUTILS MATHMATIQUES
30 INPUT "X= ";XO : INPUT "Y= ";YO
50 INPUT "Nombre de points calculer ";N : REM Nombre de points calculer
60 FOR I=1 TO N : PRINT "Point N ";I : REM Dbut de la boucle de calcul
80 INPUT "X= ";X : INPUT "Y= ";Y
100 PRINT "Nouvelle Abscisse ";
105 PRINT (XXO)*COS(A)+(YYO)*SIN(A)
110 PRINT "Nouvelle Ordonne ";
115 PRINT (YYO)*COS(A)(XXO)*SIN(A)
120 NEXT I : END
Ce listing est fourni sur le cdrom de louvrage (fichier ROTATRAN.BAS) pour fonc-
tionner avec le programme QBASIC.EXE.
8.2.6 rrIIura d'un IabIaau
Avec cet exemple simple, nous allons voir comment btir facilement et rapide-
ment un tableau de calcul sous EXCEL. Dmarrez le programme EXCEL sous
Windows, puis menu FICHIER / NOUVEAU pour commencer une nouvelle
feuille vide.
Entrez tous les textes et donnes comme sur lexemple ci-dessus : cliquez dans une case,
tapez le texte ou la valeur et validez par ENTRE. Les textes sont en noir, les donnes en
bleu, les rsultats de formules en rouge et en italique.
) * + , - .
Aeq|c dc o|o||oe [sces ||qo, qodcs} . -18,77
! Coodoeecs dc |o eoec||c o|q|ec does |'oec|ce cc .
" [oe cc|ce dc |oes|o||oe /o [m} - -3,1=0
# Yo [m} - 9,880
$
% Coodoeecs Cood. os |oes|o|. Cood. os o|o||oe
& / [m} Y [m} /' [m} Y' [m} /''[m} Y'' [m}
'
110,2 78,77 !$ $&&' &&!$ '&&
-,28 19,7 a!" '&& a#&& &#"
-35,23 3,93 a!' a#'# a&'& a#
! -1,58 57,== #$ "%#$ a! "#'$
" 35,20 =0,07 !&!" !' %' "
# 27,3= 13,=8 !"& !$ & !
Topographie et topomtrie - S. Milles, J. Lagofun
OUTILS MATHMATIQUES 283
Entrez en case C10 la formule suivante := A10 E$4
Entrez en case D10 la formule suivante := B10 E$5
Entrez en case E10 la formule suivante := C10 * COS(E$1 * PI( ) / 200) + D10 * SIN(E$1
* PI( ) / 200)
Entrez en case F10 la formule suivante := D10 * COS(E$1 * PI( ) / 200) C10 * SIN(E$1
* PI( ) / 200)
Slectionnez les cases C10 F15 et cliquez loption RECOPIER / VERS LE BAS du
menu EDITION (ou tapez CONTROL B) ; les formules se recopient en sadaptant :
seules les rfrences prcdes dun $ ne changent pas.
Voir aussi le tableau HELMERT.XLS dans lequel une feuille effectue ces calculs.
8.2.7 soIuIIon graphIqua sur kuIorad IT
Environnement de travail : angles en grades, sens de rotation trigonomtrique,
zro sur laxe des abscisses ( lest) ; ces rglages sont effectus dans la case de
dialogue CONTROLE DES UNITES du menu FORMAT (commande
DDUNITS).
Dessinez le point M dans le repre gnral :
POINT 110.12 , 78.77
Changez de repre : commande SCU, option
Origine au point 3.14 , 9.88. Rptez la
commande SCU option Z (angle de rotation
autour de laxe des Z), angle (gon) 18.767
Demandez les coordonnes du point M dans le
nouveau repre par la commande ID. Ces
coordonnes saffichent en bas de lcran texte.
Si vous voulez dautres points, sauvegardez le
SCU actuel (SCU / Sauvegarder), dessinez les
autres points dans le repre gnral (retour au
SCU gnral par SCU), rappelez le SCU
prcdent pour les identifier (SCU / Restaurer).
8.2.8 6hangamanI da rapra dans I'aspara IroIs dImansIons
Un changement de repre dans lespace peut se dcomposer en trois translations et trois
rotations indpendantes. On extrapole les formules valables en plan au cas gnral dun
changement de repre dans lespace. Les angles de rotation sont donns en sens positif
trigonomtrique (voir aussi la remarque relative la figure 5.57-b.).
On cherche exprimer dans un repre (O, x, y, z) les coordonnes dun point M connu
dans le repre (O, x, y, z).
Fig. 5.57-a. : Changement de repre
Topographie et topomtrie - S. Milles, J. Lagofun
MESURES ANGULAIRES 113
5 0kl00l 0 6I8M8I
Le gisement est un angle horizontal trs utilis par les topographes puisque trs pratique
dans les calculs.
5.1 0fIaItIoa
Le gisement d'une direction AB est
l'angle horizontal mesur positive-
ment dans le sens horaire entre laxe
des ordonnes du systme de projec-
tion utilis et cette direction AB
(fig. 3.26).
On le note G
AB
(ou aussi V
AB
).
Mathmatiquement, cest langle po-
sitif en sens horaire entre laxe des or-
donnes du repre et le vecteur . G
est compris entre 0 et 400 gon.
Par exemple (fig. 3.26) : G
AB
est lan-
gle entre le Nord (ordonnes) et la di-
rection AB.
G
BA
est langle entre le Nord et la
direction BA.
La relation qui lie G
AB
et G
BA
est :
5.2 0aIc0I 4'0a Isemeat artIr
4es coor4oaaes cartsIeaaes
Considrons les coordonnes de deux points A(E
A
, N
A
) et B(E
B
, N
B
) (voir fig. 3.26).
La relation suivante permet de calculer G
AB
: (1)
Remarque
Pour obtenir la valeur de G, il faut utiliser la fonction tan
1
( ) ou inverse tangente. Les
problmes que pose lutilisation de cette fonction sont abords dans le chapitre 5 du
tome 2 au paragraphe 2.3. Rappelons que pour lquation G = tan
1
K, une calculatrice
ne donne quune solution (100 < G < 100 gon) alors quil existe plusieurs antcdents
possibles.
Fig. 3.26. : Gisement de la direction AB
AB
G
BA
G
AB
200 + =
G
AB
tan
E
B
E
A
N
B
N
A
-------------------- =
Topographie et topomtrie - S. Milles, J. Lagofun
114 MESURES ANGULAIRES
En effet, tanG = tan(200 + G) = tan(G 200). La calculatrice ne donne donc pas
forcment le bon angle G correspondant au problme.
5.2.1 kppIIraIIon
Calculez partir de la formule (1) le gisement de la direction AB suivante :
A (10 ; 50) et B (60 ; 10)
E = E
B
E
A
= +50
N = N
B
N
A
= 40
G
AB
= tan
1
(50/ 40) = 57,045 gon
En observant le schma des points A et
B placs sur le graphique ci-contre
(fig. 3.27), on saperoit de l'incoh-
rence de ce rsultat. Langle donn nest
visiblement pas gal 57,045 gon
cest--dire 57,045 + 400 = 342,955
gon.
En fait, la calculatrice donne la valeur
de l'angle auxiliaire g (fig. 3.28). Pour
obtenir G
AB
, il faut donc tenir compte
de la position du point B par rapport au
point A ; on parle de quadrants :
G Quadrant 1 : B est l'est et au nord
de A (E > 0 et N > 0).
G
AB
= g
G Quadrant 2 : B est l'est et au sud de
A (E > 0 et N < 0).
G
AB
= 200 + g (avec g < 0)
G Quadrant 3 : B est l'ouest et au sud
de A (E < 0 et N < 0).
G
AB
= 200 + g (avec g > 0)
G Quadrant 4 : B l'ouest et au nord de
A (E < 0 et N > 0).
G
AB
= 400 + g (avec g < 0)
Fig. 3.27. : Calcul de gisement
Fig. 3.28. : Diffrents quadrants
Topographie et topomtrie - S. Milles, J. Lagofun
MESURES ANGULAIRES 115
Les valeurs de lexemple trait prcdemment mettent en vidence la ncessit de ce
calcul et la vrification de la valeur du gisement de 142,955 gon, correspondant au
schma de la figure 3.27.
5.2.2 kppIIraIIon . programmaIIon du raIruI
du gIsamanI an basIr sIandard
5 REM Entre des donnes
10 INPUT "EA = " ; EA : INPUT "NA = " ; NA
20 INPUT "EB = " ; EB : INPUT "NB = " ; NB
25 REM Cas o N=0
30 IF (NB = NA AND EB > EA) THEN G = 100 : GOTO 80
40 IF (NB = NA AND EB < EA) THEN G = 300 : GOTO 80
45 IF (NB = NA AND EB = EA) THEN PRINT "Impossible" : END
47 REM Valeur gnrale du gisement G
50 G =ATAN((EBEA)/(NBNA))
55 REM Cas des 2
e
et 3
e
quadrants
60 IF NB < NA THEN G = 200 + G
65 REM Cas du 3
e
quadrant
70 IF (EB < EA AND NB > NA) THEN G = 400 + G
80 PRINT "GAB = " ;G : END
Ce programme est fourni sur le cdrom dans le fichier GISEMENT.BAS pour une
utilisation avec QBASIC. Il constitue un sous-programme important de tous les pro-
grammes de calcul de topographie.
5.2.3 IIIIsaIIon da Ia raIruIaIrIra
La programmation prcdente nest pas ncessaire si la calculatrice possde une fonction
de transformation de coordonnes rectangulaires en coordonnes polaires. Elle est uti-
lise pour obtenir directement le gisement G (voir tome 2 chap. 5 8.1).
Sur la calculatrice, la transformation fonctionne en conventions mathmatiques, elle
donne donc langle polaire mathmatique. Pour obtenir le gisement, il suffit dintervertir
les coordonnes E et N. La calculatrice donne alors deux rsultats : la distance D
AB
puis
le gisement G
AB
(si ce dernier est ngatif, il faut ajouter 400 gon).
Exemple : sur FX 850P, tapez POL (N
B
N
A
, E
B
E
A
) [EXE] La calculatrice
donne alors la distance AB.
Puis tapez [Y] [EXE], vous obtenez alors le gisement G
AB
.
Topographie et topomtrie - S. Milles, J. Lagofun
116 MESURES ANGULAIRES
A linverse, si vous connaissez D et G, vous pouvez obtenir E et N ainsi :
REC (D , G) [EXE] La calculatrice donne alors N.
[Y] [EXE] Vous obtenez ensuite E.
5.2.4 TabIaau da raIruI da gIsamanI
Un tableau de calcul de gisement est propos sur le cdrom : il se nomme
GISEMENT.XLS. Le gisement y est programm de quatre manires diffrentes.
1) En langage de programmation dExcel : Visual Basic (fonction gisement du
tableau MENUTOPO.XLS).
2) En utilisant la mthode des quadrants (calcul du quadrant puis de langle
auxiliaire).
3) En une formule classique pouvant tre reprise dans un autre programme
(formule liste ci-aprs). Les coordonnes E et N de A tant en cases A1 et A2,
les coordonnes E et N de B tant en case B1 et B2, la formule suivante donne
le gisement de la direction AB :
Les dcalages de lignes sont uniquement destins la comprhension. Ils ne
sont pas introduits dans le tableau. Le cas B2 = A2 et B1 = A1 donne le rsultat
Impossible ; on peut aussi donner comme rsultat 0.
4) En utilisant la fonction ATAN2() dExcel qui permet un calcul direct du
gisement. La formule de calcul est alors la suivante :
= SI(ATAN2(B1A1,B2A2) > PI() /2,
100 ATAN2(B1A1,B2A2)*200/PI() + 400,
100 ATAN2(B1A1,B2A2)*200/PI())
formu|e 0ommento|res
- Sl[32-A2},
Sl[31-A1 , 100 , Sl[31-A1, lmoss|b|c , 300 }}, Cos o * )
Sl[32<A2,
A!AN[[31-A1}/[32-A2}}*200/ll[}200, Oeodoe|s 2 c| 3
Sl[31<A1,
A!AN[[31-A1}/[32-A2}}*200/ll[}=00, Oeodoe| =
A!AN[[31-A1}/[32-A2}}*200/ll[} }}} Oeodoe| 1
Topographie et topomtrie - S. Milles, J. Lagofun
MESURES ANGULAIRES 117
5.3 0tIIIsatIoa 40 Isemeat o0r Ies caIc0Is 4e coor4oaaes
En topographie, il est trs frquent de
connatre un point S (E
S
, N
S
) et de
chercher les coordonnes dun point P
visible depuis S. On dit que P est
rayonn depuis S si lon peut mesurer
la distance horizontale D
SP
et le gise-
ment G
SP
(fig. 3.29). Quel que soit le
quadrant, on peut alors calculer les
coordonnes du point P par les for-
mules suivantes :
A dfaut de mesurer directement G
SP
,
on mesure un angle avec une direc-
tion dont le gisement est connu ou
bien on calcule un G0 moyen de
station (voir 6).
S (680 379,84 ; 210 257,06) est donn en coordonnes Lambert (m), calculez les
coordonnes de P tel que : D
SP
= 45,53 m et G
SP
= 172,622 gon.
P (680 398,82 ; 210 215,68)
Graphiquement, on peut utiliser le DAO pour calculer ou dessiner un gisement.
Lenvironnement de travail est : angles en grades, sens de rotation horaire, zro
au Nord (bote de dialogue CONTROLE DES UNITES du menu FORMAT).
Calculez les coordonnes dun point rayonn P : tracez la droite SP, LIGNE du point
680379.84,210257.06 au point @45.53<172.622 (coordonnes polaires en conven-
tions topographiques). Zoom Etendu suivi de Zoom 0.8x puis commande ID pour
obtenir les coordonnes de P.
Pour obtenir la longueur et le gisement dune droite existante, on utilise la commande
LISTE ; elle donne directement la longueur SP et le gisement (appel angle dans le
plan XY ). Attention : ce gisement dpend du sens du dessin de la droite ; il est donc
donn 200 gon prs.
Fig. 3.29. : Calcul de coordonnes
E
P
E
S
D
SP
G
SP
N
P
sin +
N
S
D
SP
G
SP
cos +
=
=
Application
Rponse
Topographie et topomtrie - S. Milles, J. Lagofun
DROITES ET CERCLES
DROITES
ET CERCLES
Les calculs dintersection en topographie font gnralement appel des techniques
nouvelles par rapport aux mthodes classiques apprises en mathmatiques. En fait, les
topographes ont adapt les calculs aux donnes dont ils disposent sur le terrain pour
arriver rapidement et prcisment au rsultat. Il faut donc se familiariser avec ces
mthodes de calcul faisant intervenir gisements et distances plutt ququations de
droites ou de cercles...
I8I880II08 0 00I 080II8
IatersectIoa ar rsoI0tIoa 4e trIaaIe
Les droites sont le plus souvent connues par
un point et un gisement (voir sur la figure 4.1.
les deux droites AM et BN).
Connaissant les coordonnes des deux points
A et B, on calcule le gisement G
AB
et la dis-
tance horizontale D
AB
.
On en dduit les angles :
IAB = G
AB
G
AM
IBA = G
BN
G
BA
Il reste rsoudre le triangle IAB dont un
ct et deux angles adjacents sont connus ; on
calcule par exemple la longueur du ct AI et
on dduit les coordonnes de I de celles de A.
Fig. 4.1. : Intersection
Topographie et topomtrie - S. Milles, J. Lagofun
DROITES ET CERCLES
On peut ainsi vrifier les calculs partir de B.
Exemple
Calculez les coordonnes du point d'intersection I des droites D
1
et D
2
:
G D
1
passant par A (12,36 ; 15,62) a un gisement de 48,364 gon.
G D
2
passant par B (98,74 ; 6,56) a un gisement de 145,647 gon.
Il est ncessaire de faire un schma avant de commencer les calculs. La rponse est
donne au paragraphe 1.4.
Form0Ies 4e 0eIamhre
C'est la mthode la plus couramment employe
par les topographes ; elle utilise deux formules
donnant directement les coordonnes du point
d'intersection partir des donnes suivantes :
G coordonnes du point A (X
A
; Y
A
) et du point
B (X
B
; Y
B
) ;
G gisements G
AM
et G
BN
nots G
A
et G
B
.
Les coordonnes du point dintersection I sont :
Attention : on calcule dabord lordonne Y que lon reporte dans labscisse X.
On peut aussi trouver pour lordonne Y les formulations suivantes :
G par inversion de A et B :
G par changement de signe :
Remarques
Puisque tanG = tan(200 + G), on peut donner les gisements des droites 200 gon prs.
La formule ne donne pas de rsultat dans les cas suivants :
G Si G
A
ou G
B
sont gaux 100 gon ou 300 gon ; la fonction tangente est alors non
dfinie (voir application).
Fig. 4.2. : Intersection par Delambre
Y Y
A
X
A
X
B
( ) Y
A
Y
B
( ) G
B
tan
G
B
tan G
A
tan
-------------------------------------------------------------------- + =
X X
A
Y Y
A
( ) G
A
tan + =
Y Y
B
X
B
X
A
( ) Y
B
Y
A
( ) G
A
tan
G
A
tan G
B
tan
-------------------------------------------------------------------- + =
Y Y
A
X
B
X
A
( ) Y
B
Y
A
( ) G
B
tan
G
A
tan G
B
tan
-------------------------------------------------------------------- + =
Topographie et topomtrie - S. Milles, J. Lagofun
DROITES ET CERCLES
G videmment, si les deux droites sont parallles, tanG
A
= tanG
B
donc le dnomina-
teur de Y ne peut tre calcul.
G Le calcul de G
A
ou G
B
est inutile, seul celui de tanG
A
et tanG
B
est ncessaire.
La dmonstration de la formule de Delambre pour lintersection est dtaille ci-aprs.
et ; on en dduit que :
(3)
Lquation (3) donne la valeur Y et lquation (1) la valeur X.
1- Reprenez les donnes de l'exemple prcdent ( 1.1.) et vrifiez que vous retrouvez
le mme point d'intersection.
2- Trouvez la formule appliquer dans le cas o G
A
= 100 ou 300 gon.
3- Donnez une expression de labscisse X indpendante de lordonne Y.
2- Y = Y
A
et X = X
B
+ (Y Y
B
)tanG
B
.
3- partir des quations (1) et (2) ci-dessus, on peut crire :
Y
B
Y
A
= (X X
A
)cotanG
A
(X X
B
)cotanG
B
.
On en tire lexpression suivante : X = X
A
+
Une rsolution graphique est effectue au paragraphe 1.4.
0roItes araIIIes
Il est frquent davoir besoin de calculer partir du point I dintersection de deux droites
(D
1
) et (D
2
) (fig. 4.3.) les coordonnes du point dintersection I de deux droites (D
1
) et
(D
2
) parallles ; on rencontre ce cas dans les calculs dalignements, par exemple.
On peut calculer les coordonnes des points I
1
et I
2
par rayonnement partir de celles de
I :
X
I1
= X
I
+ L
2
. sinG
2
X
I2
= X
I
+ L
1
. sinG
1
Y
I1
= Y
I
+ L
2
. cosG
2
Y
I2
= Y
I
+ L
1
. cosG
1
G
A
tan
X X
A
Y Y
A
---------------- = G
B
tan
X X
B
Y Y
B
---------------- =
X X
A
Y Y
A
( ) G
A
(1) tan =
X X
B
Y Y
B
( ) G
B
(2) tan =
X
A
X
B
Y Y
B
( ) G
B
Y Y
A
( ) G
A
tan tan =
X
A
X
B
Y G
B
tan G
A
tan ( ) Y
B
G
B
tan Y
A
G
A
tan + =
X
A
X
B
Y Y
A
( ) G
B
tan G
A
tan ( ) Y
A
Y
B
( ) G
B
tan + =
Applications
Rponses
Y
A
Y
B
X
A
X
B
( ) cotanG
B
cotanG
B
cotanG
A
----------------------------------------------------------------------
Topographie et topomtrie - S. Milles, J. Lagofun
DROITES ET CERCLES
On peut jouer sur les signes de L
1
et L
2
pour obtenir diffrentes solutions possibles pour
le point I : si L
1
et L
2
sont ngatifs, le point I est extrieur langle et si L
1
et L
2
sont positifs, I est intrieur , comme dans le cas de la figure 4.3.
On en dduit ensuite les coordonnes du point I par intersection des droites (D
1
) et (D
2
)
laide des formules de Delambre ; ces droites passent par les points I
1
et I
2
et ont pour
gisement respectif G
1
et G
2
. On obtient :
X
I
= X
I
+ L
2
. sinG
2
+ L
1
. sinG
1
avec L
1
= d
2
/sin(200 ) = d
2
/sin ;
Y
I
= Y
I
+ L
2
. cosG
2
+ L
1
. cosG
1
avec L
2
= d
1
/sin(200 ) = d
1
/sin.
Remarques
Langle est toujours choisi infrieur 200 gon afin que son sinus reste positif.
Les considrations de signes faites pour les distances L
1
et L
2
sappliquent d
1
et d
2
.
Soit le point I de coordonnes I (2 819,794 ; 2 691,548). Soit les droites (D
1
) de
gisement G
1
= 153,4427 gon et (D
2
) de gisement G
2
= 260,5387 gon. Calculez les
coordonnes du point I, point de rencontre des parallles aux droites (D
1
) et (D
2
)
dcales vers lextrieur, respectivement d
1
= 35 m et d
2
= 45 m.
Finalement :
Fig. 4.3. : Droites parallles
X
I
X
I
d
1
G
2
sin
sin
--------------------
d
2
G
1
sin
sin
-------------------- + + =
Y
I
Y
I
d
1
G
2
cos
sin
---------------------
d
2
G
1
cos
sin
--------------------- + + =
Application
Topographie et topomtrie - S. Milles, J. Lagofun
DROITES ET CERCLES
En appliquant la formule dmontre prcdemment : = 107,0960 gon ; I se trouvant
lextrieur , on prend d
1
et d
2
ngatifs. Donc les coordonnes de I sont :
X = 2 818,219 m et Y = 2 745,709 m.
Si on prend d
1
et d
2
positifs, on trouve le symtrique de I par rapport I :
I (2 821,368 m ; 2 637,386m ) .
Si on prend d
1
ngatif et d
2
positif, on trouve : I ( 2 878,701 m ; 2 678,304 m).
Si on prend d
2
ngatif et d
1
positif, on trouve : I ( 2 760,886 m ; 2 704,791 m).
Une rsolution graphique est propose au paragraphe suivant.
8soI0tIoa rahIg0e
Rsolution des applications prcdentes
sur AutoCAD LT.
Environnement de travail : menu FORMAT /
CONTROLE DES UNITES, angles en grades,
sens horaire, zro au nord.
1- Intersection de deux droites
Trac du segment AM : LIGNE du point
12.36,15.62 au point @100<48.364
Trac du segment BN : LIGNE du point
98.74,6.56 au point @100<345.647
Coordonnes du point dintersection : commande IDentit INTersection de...
Rsultat : I (46.78, 51.86).
2- Parallles deux droites
Construction des droites (D
1
) et (D
2
) : LIGNE du point
2819.794,2691.548 au point @100<153.4427
LIGNE du point EXTrmit de... (point I) au point
@100<260.5387
Construction de I : DECALER par 35 la droite D
1
vers
le haut. DECALER par 45 la droite D
2
vers le haut.
CHNFREIN entre les deux droites dcales. ID INTer-
section de... pour obtenir les coordonnes de I.
En changeant les sens de dcalage, on trouve trs rapidement les autres solutions
possibles.
Rponse
Fig. 4.4. : Exercice 1
Fig. 4.5. : Exercice 2
Topographie et topomtrie - S. Milles, J. Lagofun
288 OUTILS MATHMATIQUES
X, Y et Z sont inconnues et peuvent tre dtermines directement par :
X = avec et
Y = avec et Z = avec
Une application de ces formules est donne dans les tableaux de calcul aux moindres
carrs du chapitre 1.
G Distance dun point un plan :
La distance PH dun point P un plan dfini
par deux vecteurs et concourants en
un point M sexprime par :
PH est le rapport du dterminant de la
matrice 3 lignes, 3 colonnes forme des trois vecteurs ( , et ) par la norme du
produit vectoriel de par .
Dmonstration : PH =
est un vecteur normal unitaire.
Une application de cette formule est dtaille au chapitre 7 du tome 1, paragraphe 1.4.2.
9 00kII088 0 080II8
9.1 0roIte 4oaae ar 4e0x oIats et IateroIatIoa IIaaIre
9.1.1 quaIIon d'una droIIa donna par daux poInIs
Il existe deux manires d'crire l'quation de la droite D (fig. 5.58.) :
Dt
X
Dt
----------- Dt
X
Det
d b c
h f g
l j k
= Det Dt
a b c
e f g
i j k
=
Dt
Y
Dt
----------- Dt
Y
Det
a d c
e h g
i l k
=
Dt
Z
Dt
----------- Dt
Z
Det
a b d
e f h
i j l
=
Fig. 5.57-c. : Distance dun point un plan
A B
PH
Dt PM, A, B ( )
A B
-------------------------------------- =
PM A B
A B
PM n PM
A B
A B
-------------------
Dt PM, A, B ( )
A B
-------------------------------------- = =
n
Topographie et topomtrie - S. Milles, J. Lagofun
OUTILS MATHMATIQUES 289
1- directement :
2- par lquation type : Y = a X + b
a et b sont obtenus par la rsolution du
systme suivant : Y
A
= a X
A
+ b
Y
B
= a X
B
+ b
Lquation de la droite passant par A(12,21 m ; 17,45 m) et B(65,47 m ; 44,44 m) est :
Y = a.X + b avec a = 0,5068 et b = 11,26 m ; la rsolution graphique est dtaille au
paragraphe 5.
9.1.2 InIarpoIaIIon IInaIra
Le cas de la figure 5.58. correspond aussi la rsolution dune interpolation linaire
(communment appele rgle de trois) : on connat labscisse X
M
dun point M de la
droite AB, on cherche son ordonne Y
M
.
Le rsultat est donn par la formule suivante :
Dterminez laltitude H dun point M situ au point kilomtrique 125,124 km sur une
route rectiligne dfinie par les deux points A et B suivants :
A daltitude 130,231 m situ au point kilomtrique 124,321 km ;
B daltitude 121,881 m situ au point kilomtrique 127,006 km.
H
M
= 130,231+ (125,124 124,321) . = 127,734 m.
Le coefficient directeur de cette droite est not a :
Lordonne lorigine de cette droite est not b :
b = Y
A
a . X
A
Fig. 5.58. : quations de droites
X X
A
Y Y
A
----------------
X
B
X
A
Y
B
Y
A
------------------ =
a
Y
B
Y
A
X
B
X
A
------------------ tan = =
Application
Y
M
Y
A
X
M
X
A
( )
Y
B
Y
A
( )
X
B
X
A
( )
----------------------- + =
Exemple
Rponse
121 881 130 231 , ,
127 006 124 321 , ,
----------------------------------------------
Topographie et topomtrie - S. Milles, J. Lagofun
290 OUTILS MATHMATIQUES
Fragrammallaa ea 8A5l6 slaaJarJ
Linterpolation linaire peut tre programme ainsi :
10 INPUT Abscisse du point 1 ;X1 : INPUT Ordonne du point 1 ;Y1
20 INPUT Abscisse du point 2;X2 : INPUT Ordonne du point 2 ;Y2
30 INPUT Abscisse du point cherch ;X
40 PRINT Ordonne du point cherch : ; Y1+(XX1)*(Y2Y1)/(X2X1)
9.2 0roIte 4e eate coaa0e, assaat ar 0a oIat
Les donnes sont le point A (X
A
, Y
A
) et la pente
p (par exemple 25 %, p = 0,25).
Par dfinition, on a : a = p (coefficient direc-
teur de la droite).
Il reste rsoudre (Y
A
= a . X
A
+ b) qui permet
dobtenir b.
Donnez lquation de la droite de pente p = 20 % passant par le point A(12,21 m ;
17,45 m).
Y = a.X + b avec a = 0,20, soit = 12,567 gon et b = 15,01 m ; la rsolution graphique
est dtaille au paragraphe 8.5.
9.3 0roIte erea4Ic0IaIre 0ae a0tre 4roIte
On connat la droite D
1
d'quation : Y
= a.X + b ; on cherche lquation de D
2
perpendiculaire D
1
et passant par le
point A(X
A
, Y
A
).
Le coefficient directeur de D
2
est 1/a.
L'quation de D
2
s'crit : Y = 1/a.X + c.
c est donn par Y
A
= 1/a.X
A
+ c.
Donc lquation de D
2
est :
a = p = tan
b = Y
A
p.X
A
Fig. 5.59. : Droite de pente connue
Application
Rponse
Fig. 5.60. : Droites perpendiculaires
Topographie et topomtrie - S. Milles, J. Lagofun
OUTILS MATHMATIQUES 291
Donnez l'quation de la droite D
2
passant par le point A(33,94 m ; 78,36 m) et perpen-
diculaire la droite D
1
d'quation Y = 0,25x + 14,40.
Y = a.X + c avec a = 4 et c = 214,12 m ; la rsolution graphique est dtaille au
paragraphe 9.5.
9.4 0roIte araIIIe 0ae a0tre 4roIte
On cherche lquation de la droite D
2
passant par le point A(X
A
, Y
A
) et parallle
la droite D
1
d'quation Y = a . X + b.
Le coefficient directeur de D
2
est a.
L'quation de D
2
s'crit Y = a . X + c.
La rsolution de Y
A
= a . X
A
+ c donne c.
Donc lquation de D
2
est :
Avec les donnes du paragraphe 9.3., trouvez la droite D
2
parallle la droite D
1
et
passant par le point A.
Y = a.x + c avec a = 0,25 et c = 69,88 m ; la rsolution graphique est dtaille au
paragraphe 9.5.
9.5 0oastr0ctIoa rahIg0e
Lenvironnement de travail est le suivant : angles en grades, zro sur laxe des
abscisses ( lest), sens trigonomtrique.
Y = a . X + (Y
A
a . X
A
)
Y
1
a
---X Y
A
X
A
a
------ +
+ =
Application
Rponse
Fig. 5.61. : Droites parallles
Application
Rponse
Topographie et topomtrie - S. Milles, J. Lagofun
292 OUTILS MATHMATIQUES
Fremler exerclce : 9.1.
Dessinez directement la droite AB : LIGNE du
point 12.21,17.45 au point 65.47,44.44
La commande LISTE donne des informations
sur tout objet dessin. En cliquant sur la droite
AB, elle fournit la valeur de langle , 200
grades prs suivant le sens dans lequel elle a t
dessine (de A vers B ou de B vers A).
On lit = 29.860 gon, soit a = tan = 0.5068.
Obtenir b nest pas immdiat et rarement indis-
pensable. Nous vous prsentons une solution
possible pour lexemple.
Construisez laxe des Y : LIGNE du point 0,0 au point 0,50. CHANFREIN entre la
droite AB et laxe des Y pour obtenir lordonne lorigine. ID EXTrmit de.... pour
obtenir la valeur de lordonne lorigine : b = 11.26 m.
euxlme exerclce : 9.2.
Dessinez directement la droite en utilisant la dfinition dune pente en pourcentage
(25 %, soit 25 m en Y pour 100 m en X) : LIGNE du point 12.21,17.45 au point
@100,25
Pour obtenir les valeurs de a et b, voir lexemple prcdent.
lralslme el qualrlme exerclces : 9.3. & 9.4.
Dessinez la droite D
1
qui est donne : LIGNE du point 0,14.40 au point 40,24.40.
Dessinez D
2
perpendiculaire la droite D
1
: LIGNE du point 33.94,78.36 au point
PERpendiculaire D
1
.
Fig. 5.62. : Droite donne
par deux points
Fig. 5.63. : Droite donne par un point et une pente
Topographie et topomtrie - S. Milles, J. Lagofun
MESURES DE DISTANCE 137
4
MESURES
DE DISTANCE
1 hI8I08I00
Alors que de tout temps on a su facilement mesurer des angles avec prcision, la mesure
de distances a toujours t un problme pour le topomtre. La prcision des mthodes
classiques de mesure ntait pas homogne avec la prcision des mesures angulaires : on
savait ds le dbut du sicle lire des angles 2,5 dmgon prs (ce qui donne un cart de
0,4 mm 100 m) mais il tait trs difficile dobtenir une prcision au centimtre sur des
bases courtes de 100 m de long... Les mesures trs prcises au fil Invar
1
(voir 2.3.1)
demandaient beaucoup de temps et de moyens.
Un premier progrs a t lapparition des distancemtres (les premires mesures datent
de 1948 la suite de travaux du physicien Sudois Erik Bergstrand sur la connaissance
de la vitesse de la lumire) : la mesure de distance est base sur la mesure du dphasage
dune onde lumineuse ayant parcouru laller-retour sur la distance mesurer. Ce procd
permet de saffranchir des irrgularits du terrain et de la longueur limite de la chane.
Les premiers distancemtres taient toutefois trs encombrants, peu prcis, de faible
autonomie et trs coteux.
Le progrs dcisif a t le perfectionnement et la miniaturisation de ces appareils
qui sont aujourdhui intgrs loptique mme des thodolites modernes (stations
totales). Les distancemtres actuels sont dun encombrement ngligeable, dune auto-
nomie suffisante pour une journe de travail au minimum et leur prcision varie de
(5 mm + 5 mm/km) pour le DI 1001 (1 mm + 1 mm/km) pour le DI 2002 (Wild),
1
LInvar est un alliage dacier forte teneur en nickel et possdant un trs faible coefficient de dilata-
tion, infrieur 1 mm/ km/C, soit 10 fois moins que lacier dans le domaine des tempratures
courantes.
Topographie et topomtrie - S. Milles, J. Lagofun
138 MESURES DE DISTANCE
soit environ 2 mm pour 1 km. (cf. 6 pour le dtail de ces caractristiques de prcision
en mm et mm/km).
La dernire tape est la dmocratisation, depuis 1990, du systme de positionnement
par satellite (systme GPS, chap. 7) qui permet, grce lemploi de deux rcepteurs, de
mesurer la longueur dune base avec une prcision de lordre de (5 mm + 1 mm/km)
sur des distances de 10 15 km, le temps de mesure variant de 10 30 minutes quels que
soient les obstacles situs entre les points et quelles que soient les conditions mtorolo-
giques, ventuellement de jour ou de nuit...
Dans ce chapitre, nous tudierons les principales techniques de mesure de distance
utilisables par le topomtre en comparant les prcisions de chacune. Le but nest pas de
dterminer la meilleure, mais den choisir une en fonction du matriel disponible et de la
prcision demande.
Remarque
Certaines mthodes dcrites dans les paragraphes suivants paratront bien poussi-
reuses au topographe moderne, y compris la mesure au ruban, car avec les stations
totales actuelles, loprateur rflchit de moins en moins. Afin de faire rflchir les
futurs oprateurs, nous avons tout de mme dtaill ces mthodes, sans toutefois
revenir au schma du tachomtre Sanguet. Leur aspect formateur nest pas ngli-
geable, ne serait-ce que pour la rflexion personnelle et lapplication du calcul trigono-
mtrique.
2 M8088 0 0I8Ik808
k l'kI0 0'08 0hk8
La mesure la chane est le moyen le plus classique et utilis pour dterminer les
distances. Ses inconvnients principaux sont dtre tributaire du terrain (accident ou
non, en forte pente ou non, etc.) et dtre limit en porte (les rubans utiliss couramment
sont limits 100 m). La prcision de la mesure est galement limite et dpend forte-
ment des oprateurs.
Autrefois, la chane tait une vritable chane maillons talonne servant mesurer les
longueurs, appele galement chane darpenteur.
Aujourdhui, on utilise le dcamtre, simple, double, triple ou quintuple, bien plus facile
manipuler. On a gard le nom de chane qui devient le terme gnral englobant le
dcamtre, le double-dcamtre, etc. On utilise aussi le terme de ruban.
10 m 20 m 30 m 50 m 100 m
0|ASSl l 1,1 mm 2,1 mm 3,1 mm 5,1 mm
0|ASSl ll 2,3 mm =,3 mm ,3 mm 10,3 mm 20,3 mm
0|ASSl lll =, mm 8, mm 12, mm 20, mm
Topographie et topomtrie - S. Milles, J. Lagofun
MESURES DE DISTANCE 139
Les rubans sont rpartis en trois classes de prcision : le tableau prcdent en donne les
tolrances de prcision fixes par une norme europenne CEE (Communaut cono-
mique Europenne).
Les valeurs du tableau tant des tolrances, si lon veut obtenir lcart type il suffit de les
diviser par 2,7 (tome 2 chap. 5 12.3.2). Par exemple pour un ruban de 50 m de classe
II, lcart type sur une mesure est de 10,3 / 2,7 = 3,8 mm.
La longueur dun ruban est donne une temprature ambiante donne (20 C en
gnral) et pour une tension donne. Par exemple, le ruban Mtralon en acier est talonn
avec une tension de 4,9 daN pour un ruban de 50 m de classe I. La force de tension
respecter est gnralement indique sur le ruban. Les rubans en matriaux souples sont
trs sensibles cette tension (voir ltude des corrections dans les paragraphes suivants).
Lors de mesures fines, dont la prcision doit avoisiner la tolrance du ruban, il faut :
G tenir le ruban par lintermdiaire dun dynamomtre pour assurer une tension opti-
male et viter de lallonger par traction lors de la mesure : un effort de 5 daN sur un
ruban en acier de section 0,2 13 mm
2
quivaut un allongement de 5 mm sur un
ruban de 50 m, ordre de grandeur de la tolrance de prcision de la classe I. Si la
chane est suspendue au-dessus du sol, loprateur doit rgler la tension du dynamo-
mtre de faon que lerreur de chanette, cest--dire la forme incurve prise par le
ruban, sannule avec lallongement d la tension du ruban ( 2.3.6) ;
G corriger la valeur lue du coefficient de dilatation linaire du matriau du ruban
(gnralement de lacier dont le coefficient vaut 11.10
6
C
1
, soit un allongement de
5,5 mm sur un ruban de 50 m pour une augmentation de 10 C ;
G si le chanage demande plusieurs portes de chane, aligner les diffrentes portes
soit vue, soit avec des fiches darpentage ou des jalons. Une erreur dalignement de
30 cm sur un ruban de 50 m donne une erreur sur la distance mesure de 1 mm. Dans
ce cas, la mesure lue est plus grande que la valeur relle.
2.1 Mes0res ea terraIa r0IIer
En topographie, la donne essentielle est la distance horizontale entre deux points.
Suivant la configuration du terrain, elle est plus ou moins difficile obtenir prcisment
la chane.
Fig. 4.1. : Mesure de prcision au ruban
Topographie et topomtrie - S. Milles, J. Lagofun
140 MESURES DE DISTANCE
2.1.1 TarraIn rguIIar aI horItonIaI
Si le terrain est rgulier et en pente
faible (moins de 2 %), il est possible
de se contenter de poser le ruban
sur le sol et de considrer que la dis-
tance horizontale est lue directement
(fig. 4.2.). La prcision quil est pos-
sible dobtenir sur une mesure est au
mieux de lordre de 5 mm 50 m
pour un ruban de classe I.
Montrez qu partir de 2 % de pente, une erreur de 1 cm apparat sur une mesure de
50 m.
Dp = 50 m, H = 0,02 . 50 = 1 m donc Dh = 49,99 m.
2.1.2 TarraIn an panIa rguIIra
Si le terrain nest pas parfaite-
ment horizontal, il faut consid-
rer que lon mesure la distance
suivant la pente. Pour connatre
la distance horizontale avec pr-
cision, il faut donc mesurer la
dnivele H entre A et B ou
bien la pente p de AB (fig. 4.3.).
Soit :
ou bien : puisque p = tani.
La prcision est du mme ordre que prcdemment, cest--dire 10 mm 50 m.
Vous mesurez une distance suivant la pente de 37,25 m et vous mesurez, au clisimtre,
une pente de 2,3 %. Quelles sont les valeurs de Dh et de H ?
Dh = 37,25 / = 37,24 m et H = = 0,86 m.
Fig. 4.2. : Mesure au ruban
en terrain horizontal
Application
Rponse
Fig. 4.3. : Mesure au ruban en terrain
en pente rgulire
Dh Dp
2
H
2
=
Dh Dp i cos Dp
1
1 tan
2
i +
---------------------
Dp
1 p
2
+
------------------ = = =
Application
Rponse
1 0 023
2
, + 37 25
2
37 24
2
, ,
Topographie et topomtrie - S. Milles, J. Lagofun
MESURES DE DISTANCE 141
2.2 Mes0res ea terraIa Irr0IIer o0 ea forte eate
On ne peut pas tendre le ruban sur le sol cause de ses ondulations. De plus, la pente (ou
la distance chaner) est telle quon ne peut pas directement mesurer la distance Dh.
2.2.1 Masura par rassauIs horItonIaux
Citons pour mmoire la mthode appele mesure par ressauts horizontaux ou cultella-
tion. Illustre par la figure 4.4., elle ncessite lemploi dun niveau bulle et de deux fils
plomb en plus de la chane et des fiches darpentage (ou jalons). Sa mise en uvre est
longue et le procd peu prcis.
On peut remarquer que :
Remarque
Lorsque loprateur doit reporter plusieurs fois le ruban pour mesurer une longueur, il
faut aligner les portes. Cet alignement seffectue gnralement vue en utilisant des
fiches darpentage ou des jalons. Le dfaut dalignement doit tre infrieur 20 cm sur
30 m (ce qui est relativement facile respecter) pour obtenir une prcision au milli-
mtre.
Si loprateur mesure une longueur de 50 m avec un cart type valant par exemple
L
= 10 mm, la prcision obtenue sur une longueur mesure avec n reports du ruban de
50 m vaut (tome 2 chap. 5 12.3.6.4). Par exemple, une longueur de 125 m
exige trois reports de ruban, donc une incertitude minimale de 10 . 17 mm.
2.2.2 Masura an moda suspandu
Un fil en matriau stable (Invar) est tendu au-dessus du sol. La tension est maintenue
constante par des poids (fig. 4.5.). Loprateur doit mesurer la dnivele H entre les
sommets A et B des tripodes de suspension du fil pour pouvoir calculer la longueur Dh
en fonction de la distance incline Di mesure : .
Fig. 4.4. : Mesure au ruban par ressauts horizontaux
Dh Dh
1
Dh
2
Dh
3
+ + =
L
n
3
Dh Di
2
H
2
=
Topographie et topomtrie - S. Milles, J. Lagofun
142 MESURES DE DISTANCE
On sait calculer lerreur sur la distance due la forme de chanette prise par le fil
( 2.3.5). Il est mme possible dannuler lerreur de chanette par un choix judicieux de
la tension appliquer au fil ( 2.3.6).
Cette mthode donne des rsultats satisfaisants en mesurage de prcision mais elle est
longue mettre en uvre. On obtient une prcision millimtrique pour des portes dune
centaine de mtres. Elle est applicable un ruban.
Remarque
La diffrence entre la longueur de la corde A B et celle de la chanette peut tre
considre comme constante pour une tension donne et pour un fil donn (elle est
fonction de son poids par unit de longueur) si la dnivele entre A et B reste faible.
Cest pourquoi certains constructeurs donnent la correction de chanette appliquer
pour une tension donne sous forme dune correction dtalonnage spcifique la
mesure en mode suspendu.
2.3 Mes0rae 4e rcIsIoa : taIoaaae 4'0a r0haa
Pour effectuer des mesures de haute prcision avec un ruban, il faut ltalonner. Ceci se
fait en mesurant la longueur dune base connue trs prcisment.
2.3.1 6onsIrurIIon d'una basa d'IaIonnaga prrIsa
Une mthode consiste utiliser le mesurage au fil Invar. Ce procd sert aussi
ltalonnage des distancemtres : actuellement, cet talonnage se fait plutt par interf-
romtrie, ce qui assure des prcisions de lordre de 0,01 mm sur 100 m.
Le fil Invar permet la cration de bases connues avec une prcision infrieure au milli-
mtre sur des portes allant jusquau kilomtre (mesure en mode suspendu, 2.2.2).
Des bases dtalonnage dune longueur de 120 m connues au millimtre, sont mises
disposition des topomtres par le service du cadastre des grandes villes. La DRIR (Direc-
Fig. 4.5. : Mesure en mode suspendu
Topographie et topomtrie - S. Milles, J. Lagofun
MESURES DE DISTANCE 143
tion Rgionale de lIndustrie et de la Recherche) dlivre les certificats dtalonnage des
rubans de prcision (classe I).
2.3.2 6orrarIIon d'IaIonnaga
La valeur relle dune mesure sexprime par
k
E
est le coefficient dtalon-
nage dtermin en mesurant la
longueur dune base dtalon-
nage connue.
On appelle correction dta-
lonnage le terme
C
E
= k
E
. L
mesure
.
Loprateur lit la valeur indi-
que par le ruban sur la base
connue : si le ruban est trop
long, il lit une valeur trop petite
et inversement, s'il est trop
court, une valeur trop grande.
Par exemple, un double dca-
mtre indique 19,987 m en
mesurant une base de 20,000 m
(fig. 4.7.). Il est donc trop long
de 0,013 m et donne des valeurs
trop petites. Il faut le corriger de
0,013 m tous les 20 m.
Lexpression du coefficient dtalonnage est :
Dans le cas de la figure 4.7., on obtient : k
E
= 6,5.10
4
.
Si loprateur mesure avec le mme ruban une longueur de 20,000 m (fig. 4.6.), elle vaut
en ralit 20 . (1 + 6,5. 10
4
) = 20,013 m.
Sil mesure sur le terrain une longueur de 18,655 m, sa valeur relle est :
L
exacte
= 18,655 . (1 + 6,5. 10
4
) = 18,667 m.
Remarque
Le terme m
E
= est appel module dtalonnage. On a donc
k
E
= m
E
1, ici m
E
= 1,00065.
L
exacte
L
mesure
1 k
E
+ ( ) =
Fig. 4.6. : Utilisation dune base dtalonnage
Fig. 4.7. : Mesure avec le ruban talonn
k
E
L
base
L
indique par le ruban
L
indique par le ruban
------------------------------------------------------ =
L
base
L
indique par le ruban
-------------------------------------
Topographie et topomtrie - S. Milles, J. Lagofun
144 MESURES DE DISTANCE
2.3.3 6orrarIIon dua Ia IampraIura
Un ruban est gnralement talonn la temprature te = 20 C. La correction de
dilatation est positive si la temprature est suprieure la temprature dtalonnage ;
dans ce cas, un ruban trop long donne des rsultats trop petits ; fig. 4.5. et 4.6. Cette
correction est ngative si la temprature est infrieure la temprature dtalonnage ;
dans ce cas, un ruban trop court donne des rsultats trop grands. Si vous mesurez en t,
au soleil, la temprature du ruban en acier peut atteindre 50 C ; elle peut tre mesure
sur le terrain par des thermomtres dambiance ou par des thermomtres de contact.
Le coefficient de dilatation de lacier est k = 1,08.10
5
C
1
. On obtient donc :
te est la temprature dtalonnage (20 C en gnral).
Exemple
Si vous mesurez une longueur de 35,035 m avec un ruban en acier t = 40 C, il faut
corriger la valeur lue dune valeur positive (40 20) . 1,08 . 10
5
soit + 0,22
mm/m.
Donc la longueur exacte est : 35,035 . (1 + 0,22 . 10
3
) = 35,043 m.
2.3.4 6orrarIIon da IansIon (ou d'IasIIrII du ruban)
Comme toute mesure, ltalonnage doit tre fait tension constante connue du ruban :
pour cela, on utilise un dynamomtre ou bien un poids accroch au ruban suspendu au
dessus du sol. Lallongement L en mtre dun ruban dacier soumis une tension T
sexprime comme suit :
L : longueur du ruban exprime en m.
S : section constante du ruban en mm
2
.
E : module dlasticit de lacier E = 21 000 daN/mm
2
.
T : effort de tension exprime en daN (1 kgf = 9,81 N).
k
T
est appel le coefficient de tension.
Dans lexpression prcdente, T
0
est la tension dtalonnage ( 5 daN).
Exemple
Un ruban de 50 m, de section (0,2 13) mm
2
talonn sous une tension de 5 daN
sallonge de 10 mm sous une tension de 16 daN.
La longueur exacte est alors :
avec :
L
exacte
L
mesure
1 1 08 , 10
5
t te ( ) + [ ] =
L
LT
ES
------ =
L
exacte
L
mesure
1 k
T
+ ( ) =
k
T
T T
0
( )
ES
------------------- =
Topographie et topomtrie - S. Milles, J. Lagofun
MESURES DE DISTANCE 145
2.3.5 6orrarIIon da rhanaIIa
Lors dune mesure en mode suspendu, le ruban prend une forme dite de chanette
(dformation libre dune chane tendue entre deux points A et B ; fig. 4.8.).
La flche f de cette chanette peut tre rduite par augmentation de la tension mais ne peut
pas tre annule. La correction est toujours ngative car leffet de chanette est identique
un allongement de la chane.
Elle sexprime par : avec
T est la tension de la chane (daN).
D est la distance rectiligne entre les supports du ruban (m).
L est la longueur suivant le ruban cest--dire L
mesure
.
p est le poids du ruban par mtre de longueur (daN/m). Le poids volumique de lacier
tant de 7,85 . 10
3
daN/m
3
, pour une section classique (0,2 13) mm
2
, le poids linaire
est p = 7,85 . 10
3
0,2 . 10
3
13 . 10
3
20 . 10
3
daN/m.
1) Calculez la longueur relle D mesure par une chane en acier de longueur L = 50 m
et de (0,2 13) mm
2
de section, suspendue ses extrmits et tendue 5 daN.
2) Calculez lerreur de chanette induite par une variation de la tension de 2 daN sur la
chane de lexercice prcdent lorsquelle est tendue 10 daN.
1) On cherche D = L (1 + k
C
) donc il faut rsoudre une quation du troisime degr. La
rsolution par approximations successives
1
permet de trouver ds la seconde itration
que D = 49,914 m. Le tableau ci-aprs indique les calculs successifs.
1
Lquation du troisime degr est programme sur certaines calculatrice, on peut aussi retrouver ses
solutions exactes en utilisant par exemple la thorie des nombres complexes.
Fig. 4.8. : Effet de chanette sur une mesure en mode suspendu
L
exacte
D L
mesure
1 k
C
+ ( ) = = k
C
p
2
D
3
24 L T
2
----------------------- =
Application
Rponse
Topographie et topomtrie - S. Milles, J. Lagofun
146 MESURES DE DISTANCE
Lcart entre la longueur relle et la longueur mesure est 8,6 cm.
Si la tension est de 10 daN, on obtient
D = 49,978 m, soit un cart de 2,2 cm.
Pour obtenir un cart de lordre du milli-
mtre, il faudrait tendre 39 daN ; le
ruban sallongerait alors de 3,1 cm. Nous
verrons au paragraphe 2.3.6. quune tension de lordre de 15 daN permet dquilibrer
lallongement d la tension et le raccourcissement d la chanette.
2) Pour T = 8 daN, D = 49,966 m ; lcart est donc de 1,2 cm.
Pour T = 12 daN, D = 49,985 m ; lcart est donc de 7 mm.
partir de T = 16 daN, une variation de tension de 1,5 daN entrane une erreur
infrieure 1 mm sur 50 m.
Remarque
Les rsultats des deux exercices prcdents montrent quune tension de lordre de 15
16 daN permet une prcision optimale avec ce ruban.
2.3.6 hoIIon da IansIon normaIa du ruban
Pour liminer lerreur de chanette, il est possible dappliquer au ruban une tension dite
normale Tn telle que lallongement d la tension compense lerreur de chanette. La
valeur de Tn peut tre calcule en galisant les erreurs de chanette et de tension, cest-
-dire :
Attention ! D est fonction de Tn.
Calculez Tn pour une chane en acier de 50 m, de (0,2 13) mm
2
de section talonne
5 daN.
Cette quation doit tre rsolue par approximations successives car la longueur exacte
D est fonction de la tension normale Tn (voir ci-aprs). On trouve Tn = 15,221 daN.
Lerreur due la chanette est de + 9 mm. La longueur exacte est plus petite : cest
comme si on utilisait un ruban droit mais plus long de 9 mm. Lerreur due laugmen-
tation de tension est de 9 mm : le ruban est allong de 9 mm, il indique donc une
mesure trop petite. Les deux erreurs se compensent.
l IkAI|oNS , - F
.,
!
]24]6
50,000 "''!
1 "''! "''"
2 "''" "''"
Tn To ( ) L
S E
--------------------------------
p
2
D
3
24 Tn
2
------------------- =
p
2
D
3
24 Tn
2
------------------- L D =
Tn To 1
D
L
----
S E + =
Application
Rponse
Topographie et topomtrie - S. Milles, J. Lagofun
MESURES DE DISTANCE
sous une tension de 5 daN 20 C, en fonction de la longueur mesurer L. Cest un
moyen simple dviter les calculs prcdents dans les cas o la prcision du centimtre
suffit.
M8088 Fk8kllk0II008
Mes0re avec 0ae sta4Ia
Ce type de mesure parallactique
ncessite lemploi dun thodo-
lite et dune stadia. Une stadia
est une rgle comportant deux
voyants (triangulaires ou circu-
laires) dont lcartement est
connu (gnralement 2 m). Il
existe des stadias Invar pour des
mesures de haute prcision. La
stadia est dote dune nivelle
sphrique et dun viseur pour
rgler sa perpendicularit par
rapport la ligne de vise A B
(fig. 4.10-a.).
Loprateur dispose en A un
thodolite (ou un cercle dali-
gnement) et en B une stadia
horizontale perpendiculaire la
distance mesurer AB.
Le rglage en hauteur est inutile : langle mesur est langle projet sur le plan horizontal.
Fig. 4.9. : Tension normale en fonction de la longueur du ruban
et de la temprature de mesure
Fig. 4.10-a. : Mesure avec une stadia
Topographie et topomtrie - S. Milles, J. Lagofun
MESURES DE DISTANCE
En projection sur le plan horizontal passant par exemple par le point A, on obtient :
avec L = 2 m (cas gnral).
FrrIsIon da raIIa IarhnIqua da masura
En considrant la longueur L exacte, le calcul de l'cart type thorique sur la distance
horizontale Dh donne :
Dh
= .
Si lon utilise un thodolite T16 et que lon mesure avec une paire de squences (chap. 3,
4.3), on peut estimer
= 2,5 mgon. Cela donne donc une prcision de 2,4 cm
35 m ou 5 cm 50 m.
Si lon utilise un thodolite T2 et une mesure deux paires de squences, on peut estimer
= 5/ = 3,5 dmgon, valeur usuelle ; on peut donc obtenir jusqu 7 mm
50 m.
kppIIraIIon
Une mesure de mtrologie ncessite la
connaissance au millimtre prs de la
distance entre deux thodolites. Un tho-
dolite est stationn en chacun des points
A et B et par des vises angulaires sur
une stadia Invar ; loprateur cherche
dterminer la prcision de connaissance
de la base AB.(fig. 4.10-b.).
,AI?HEFJE
La stadia Invar est constitue dun tube semi-circulaire en acier entourant un fil Invar. Ce
fil est riv au tube dun ct et mis sous tension constante de 10 daN par un ressort de
lautre ct. Pour une augmentation de la temprature gale 10 C, le fil de 2 000 mm
de long sallonge de 0,024 mm, le tube en acier sallonge de 0,24 mm ce qui augmente
la tension du ressort et allonge le fil Invar de 0,004 mm. Mais le systme de suspension
en laiton du voyant agit de 0,018 mm en sens oppos, ce qui fait que globalement
lallongement nest que de 0,01 mm pour 10 C. On peut donc considrer connatre la
longueur de la stadia Invar au moins au dixime de millimtre prs.
2
--- tan
L
2Dh
----------- = Dh
2
--- cot =
L 1 tan
2
/2 ( ) + [ ]
4tan
2
/2 ( )
-----------------------------------------
rad
4Dh
2
L
2
+
4L
-------------------------
rad
=
2
Fig. 4.10-b. : Application
dune mesure parallactique
Topographie et topomtrie - S. Milles, J. Lagofun
MESURES DE DISTANCE 155
4 M8088 8Ik0IMI8I008
La stadimtrie est une
mthode moins prcise que
les prcdentes. Elle permet
la mesure indirecte dune
distance horizontale en lisant
la longueur intercepte sur
une mire par les fils stadim-
triques du rticule de vise.
Le point A, centre optique
dun thodolite, est situ la
verticale du point stationn en
S ; loprateur vise une mire
pose en P et effectue la lec-
ture intercepte par chaque fil
sur la mire soit m
1
et m
2
.
La distance horizontale peut sexprimer par
1
:
Si la vise est horizontale, (V = 100 gon) ; on obtient :
4.1 8ta4ImtrIe aaIe coastaat
Si langle est constant dans lappareil utilis, on a : Dh = K (m
2
m
1
)
sin
2
V.
La constante K = est appele constante stadimtrique. Elle vaut gnrale-
ment 100 (voir chap. 5 1.2.6) ; cest pourquoi lexpression de Dh devient :
.
4.1.1 FrrIsIon obIanua sur Ia masura da ,D avar un nIvaau
Pour un niveau, V = 100 gon, do : .
1
Voir la dmonstration sur le nivellement indirect au chapitre 6, paragraphe 4.1.2.
Fig. 4.11. : Mesure par stadimtrie
Dh
m
2
m
1
2
2
--- tan
------------------- sin
2
V =
Dh
m
2
m
1
2
2
--- tan
------------------- =
1
2 / 2 ( ) tan
--------------------------
Dh 100 m
2
m
1
( ) sin
2
V =
Dh 100 m
2
m
1
( ) =
Topographie et topomtrie - S. Milles, J. Lagofun
156 MESURES DE DISTANCE
Le calcul de l'cart type sur Dh donne permet dobtenir :
Dh
2
= 2 (K.
m
)
2
.
m
est lcart type sur la connaissance
des lectures m : on peut lvaluer au
mieux 1 mm jusqu' 35 m pour un
niveau ou un thodolite classique. Ce qui
implique que la prcision sur Dh est de
lordre de 14 cm 35m.
Avec un niveau de prcision (de type
NA2 avec micromtre optique et mire
Invar), on peut estimer que
m
0,1mm
35 m.
La prcision devient alors 1,4 cm
35 m.
Exemple de lecture dans loptique dun
niveau de chantier type NAK (fig.
4.12.) : loprateur lit : m
2
= 7,60 dm
et m
1
= 5,69 dm et on obtient
Dh = 19,1 m 14 cm.
4.1.2 FrrIsIon sur Ia masura da ,D avar un IhodoIIIa
Lcart type sur Dh est calcul partir de lexpression gnrale (qui est une expression
approche) : Dh = 100 (m
2
m
1
) sin
2
V.
Dh
2
= 2 [ K
m
sin
2
V]
2
+ [ 2K (m
2
m
1
) sinV cosV
V rad
]
2
.
Comme K(m
2
m
1
) sin V = Dh / sinV, on obtient finalement :
Dh
2
= 2 [ K
m
sin
2
V]
2
+ [ 2 Dh cotanV
V rad
]
2
.
Si lon utilise un thodolite T16, on a
V
= 2,5 mgon. Chaque lecture sur mire est
estime
m
= 1mm prs jusqu' 35 m de porte.
G Pour une porte de 35 m et un angle znithal V de 100 gon, on retrouve la prcision
du niveau 14 cm 35 m.
G Pour une porte de 35 m et pour V = 80 gon, on obtient une prcision de 13 cm.
G Pour une porte de 35 m et pour V = 50 gon, on obtient une prcision de 7 cm.
Attention ! la prcision semble samliorer avec la diminution de V mais, en fait, plus la
vise devient verticale et moins les lectures sur mire sont aises. Par exemple, pour
V = 50 gon et Dh = 35 m, la distance de vise est en ralit de 49,5 m.
La valeur obtenue de Dh reste indicative, au mieux 10 cm prs.
Fig. 4.12. : Lecture sur fils stadimtriques
Topographie et topomtrie - S. Milles, J. Lagofun
MESURES DE DISTANCE 157
4.2 8ta4ImtrIe aaIe varIahIe
Langle est variable sur certains appareils dits auto-rducteurs , par exemple le
tachomtre Wild RDS, le terme auto-rducteur signifiant que le calcul de rduction
de la distance incline lhorizontale est automatis. Langle stadimtrique varie en
permanence en fonction de linclinaison de la vise de manire intercepter une longueur
constante L sur la mire. Les fils stadimtriques deviennent des courbes qui dfilent dans
loptique au fur et mesure de linclinaison de la lunette (voir courbes C0, C1 et C2,
fig. 4.13.). La mire utilise est spciale : elle comporte une graduation particulire (sur la
figure 4.13., elle est place 1m du sol) sur laquelle loprateur fait tangenter la courbe
origine C
0
de manire pouvoir lire directement sur la mire la longueur Dh, sans avoir
faire de soustraction et en une seule lecture. La mire comporte aussi une graduation
coulissante qui permet de positionner la graduation particulire la hauteur des tourillons
du thodolite.
La formule donnant Dh reste la mme, cest--dire Dh = 100 . L , L tant la longueur
intercepte sur la mire.
En stadimtrie angle variable, la prcision est lgrement meilleure quen stadimtrie
angle constant, puisque loprateur neffectue quune lecture et le point de la gradua-
tion origine est plus prcis quune seconde lecture. On peut estimer lerreur de point
0,5 mm 35 m. La prcision devient alors 100 = 112 mm.
La figure 4.13. ci-contre reprsente lob-
jectif du Wild RDS ; C0 est la courbe ori-
gine, C1 la courbe des dniveles (avec
coefficient) et C2 la courbe des distances
horizontales. Les lectures sont :
Dh = 100 2,53 dm
soit : 25,30 m 11 cm
H = 100 0,1 1,05 dm
soit : 1,05 m 1 cm
5 M808 Fk8 k8IkII08 0 F8I
Cest un procd qui est peu prcis bien que plus prcis que la stadimtrie.
La mthode gnrale consiste lire (fig. 4.14.) les angles V et V correspondant des
graduations m et m de la mire interceptes par le fil horizontal du rticule (axe de vise).
On pose pour la suite L = m m.
1 ( )
2
0 5 , ( )
2
+
Fig. 4.13. : Lecture sur fils
stadimtriques mobiles
Topographie et topomtrie - S. Milles, J. Lagofun
160 MESURES DE DISTANCE
Calculez la distance Dh caractrise par les donnes suivantes et valuez son incerti-
tude. La longueur intercepte sur la mire est L = 3,8 m ; langle V = 103,333 gon et
langle V = 96,445 gon sont mesurs au thodolite T16.
Dh = 35,087 m. Si on utilise un thodolite T16,
V
= 2,5 mgon, on peut estimer les
erreurs de point sur la mire
m
= 0,5 mm 35m.
On trouve alors
Dh
= 1,9 cm. Donc, on peut crire : Dh = 35,09 m 2 cm.
6 M808 k0 M0I8 0'08 IMl
Un IMEL, Instrument de Mesure lectronique des Longueurs ou distancemtre, est
un appareil qui fonctionne le plus souvent par mission dune onde lectromagntique,
qui permet la mesure du dphasage de lcho de cette onde renvoye par un rflecteur.
Application
Rponse
Fig. 4.14- a. : T1010 et DI 1001, 1600, 2002, doc. Leica
Topographie et topomtrie - S. Milles, J. Lagofun
MESURES DE DISTANCE 161
Ces appareils peuvent tre intgrs loptique dun thodolite ou tre monts en externe
sur des bases de thodolites optico-mcaniques classiques ou lectroniques .
Ils fonctionnent sur la base de diffrentes technologies, dont les suivantes :
G les appareils lectro-optiques utilisent une onde lectromagntique module (voir
6.1.3) par une onde porteuse lumineuse de type lumire blanche, infrarouge ou
laser. Ce sont les plus utiliss dans le domaine de la topomtrie. La photographie de
la page prcdente (documentation Leica) prsente trois types de distancemtres
indpendants pouvant tre associs des thodolites optico-mcaniques ou
lectroniques ;
G les appareils micro-ondes utilisent des micro-ondes dont les frquences varient de
5 35 GHz (Gigahertz ou 10
9
Hz) ;
G les appareils longues ondes utilisent des ondes radio trs longues, de lordre du
kilomtre : dune moins bonne prcision que les appareils prcdemment cits, ils
sont trs peu utiliss en topomtrie.
La prcision des distancemtres varie actuellement de (5 mm + 5 ppm), soit 1 cm
pour 1 km pour le DI 1001) (1 mm + 1 ppm), soit 2 mm pour 1 km pour le Wild DI
2002. Le ppm (ou partie par million) reprsente 1 mm/km. La notation de lcart type
sous la forme (Cste + k.ppm) est adopte par tous les constructeurs. L'erreur ppm, dite
proportionnelle, est essentiellement due la prcision de connaissance de lindice de
lair.
La porte des vises varie selon les ondes employes : les appareils utilisant linfrarouge
(les moins coteux raliser) portent jusqu 7 km, par exemple le DI 2002 avec un
miroir onze prismes, dans des conditions atmosphriques trs favorables cest--dire
sans brume, par temps couvert, avec une visibilit 30 km et en labsence de flamboiement
de lair. Les appareils utilisant le laser portent jusqu 60 km en gardant une prcision de
(6 mm + 1 ppm), soit 6,6 cm sur 60 km. Ces appareils ncessitent toutefois plus de
puissance lmission et sont plus coteux. Les appareils micro-ondes portent jusqu
150 km avec une prcision de lordre de (1 cm + 3 ppm).
6.1 FrIacIe 4e Ia mes0re 4'0ae 4Istaace I'aI4e 4'0a IMl
6.1.1 FroprIIs da Ia propagaIIon das ondas
Les proprits fondamentales de la propagation des ondes utilises par ces appareils sont
les suivantes :
G la frquence, note f, et la vitesse de propagation dune onde dans le vide, note
c pour clrit, sont constantes entre le point dmission et le point de rception.
La longueur donde est note . Ces termes sont lis par la relation c = f.
Dans le vide, la vitesse de propagation dune onde lectromagntique est de c
vide
= 299 792 458 m. s
1
;
Topographie et topomtrie - S. Milles, J. Lagofun
162 MESURES DE DISTANCE
G latmosphre diminue la vitesse de propagation des ondes. Cette diminution est
fonction de la frquence de londe, de la composition chimique de latmosphre et des
conditions de temprature, dhumidit et de pression atmosphrique ;
G lamplitude dune onde diminue en traversant latmosphre : cest un phnomne
dabsorption de dispersion de lnergie ;
G le rapport entre la vitesse de propagation dune onde dans latmosphre, note V, et sa
vitesse dans le vide est appel indice de rfraction, not n, de cette onde de frquence
f ; on a n = c/ V. Lindice de rfraction de latmosphre est dtermin exprimentale-
ment et a pour valeur approximative n = 1,0003 dans des conditions normales de
temprature et de pression.
6.1.2 Masura da dphasaga
Pour mesurer une distance Di entre deux points au moyen dun IMEL, loprateur
stationne lappareil sur le point A et on place un miroir la verticale du point B
(fig. 4.15.). Un train dondes est envoy de A vers B : cest son retour au point A aprs
rflexion sur le miroir B qui permet de calculer la distance Di parcourue.
Il nest pas concevable de mesurer la distance simplement par calcul du temps mis par
londe faire le parcours aller-retour et ce pour la raison suivante : supposons que
loprateur utilise un distancemtre du type DI 2002 dont le systme de mesure fonc-
tionne avec une frquence de base 50 Mhz, de longueur donde 3 m. La vitesse de
propagation de londe dans latmosphre est V = . f = 3 50. 10
6
= 150 000 km/s. Le
Fig. 4.15. : Mesure de distance avec un IMEL
Topographie et topomtrie - S. Milles, J. Lagofun
MESURES DE DISTANCE 163
temps mis par londe pour faire laller-retour sur une distance de 1 km est de 7 . 10
6
s,
ce qui est techniquement impossible mesurer avec prcision, du moins avec une tech-
nologie simple et peu coteuse : seule une horloge atomique, permettant daller jusqu
10
13
seconde, donnerait la distance au millimtre prs, sans compter les variations de
vitesse dues au fait que londe ne se dplace pas dans un milieu vide et homogne.
La mesure de la distance sera faite par la mesure du dphasage de londe retour par
rapport londe aller. Le signal mis par lIMEL est une srie dondes sinusodales dont
la longueur donde correspond la distance rectiligne parcourue par londe pendant
un temps T appel priode (fig. 4.16.) : , T est linverse de la frquence.
Entre lmetteur et le rcepteur (par lintermdiaire du rflecteur), il existe un nombre
entier n de longueurs donde plus une fraction de longueur donde : sur la figure 4.15.,
n = 4 et = / 4. Cela correspond un dphasage de / 4, techniquement simple
dterminer. On peut en dduire avec prcision la distance correspondante, savoir / 8
dans cet exemple.
On sait donc maintenant que :
Le problme consiste prsent de compter le nombre entier n de longueurs donde
ncessaire au parcours aller-retour de D
AB
. On appelle cela une ambigut sur la
distance (voir aussi lambigut en GPS, chapitre 7).
Lambigut peut tre leve par lutilisation de frquences multiples suivant le principe
suivant : admettons que lon mesure une distance de 6 321,45 m avec un distancemtre
dont la frquence de base est de longueur donde 20 m. On peut donc mesurer sans
ambigut une distance infrieure 10 m puisque le trajet aller-retour sera infrieur
20 m ; avec une frquence de longueur donde 200 m, il est possible de mesurer sans
ambigut une distance infrieure 100, et ainsi de suite. Londe mise comporte dautres
frquences qui seront des sous-multiples de la frquence de base.
T
1
f
---
c
air
------- = =
Fig. 4.16. : Principe de la mesure de dphasage
D
A B
1
2
--- n + ( ) =
Topographie et topomtrie - S. Milles, J. Lagofun
164 MESURES DE DISTANCE
Par exemple : frquence de base = 20 m mesure 1,45 m
2
e
frquence = 200 m mesure 21,4 ..m
3
e
frquence = 2 000 m mesure 321.....m
4
e
frquence = 20 000 m mesure 6 320.....m
La lecture finale est compose de toutes les lectures sur chaque frquence : 6 321,45 m.
Ces mesures sont effectues plusieurs fois et une moyenne est affiche au bout dun
temps variant de 0,5 3 secondes suivant le mode de mesure slectionn : normal, rapide
ou rptitif. Elles sont effectues en continu en mode tracking (recherche, suivi).
On nutilise pas une seule longueur donde de 20 000 m parce que la prcision obtenue
par la mesure du dphasage est moins bonne sur de grandes longueurs donde ; do le
faible intrt des appareils longues ondes.
6.1.3 ModuIaIIon da I'onda
Lamplitude dune onde se propageant dans
latmosphre diminue par absorption de son
nergie. Lincidence de cette absorption varie en
fonction de la frquence, savoir que plus la fr-
quence est leve, plus la longueur donde est
courte et plus labsorption est importante. Pour
augmenter la porte des ondes courtes utilises, on
les superpose une onde dite porteuse de fr-
quence plus basse, qui porte plus loin. Cette super-
position est appele modulation (fig. 4.17. : londe
courte
1
est superpose une onde plus longue
2
ralisant une modulation en amplitude).
6.1.4 8rhma IonrIIonnaI d'un IMLL
Le schma de la figure 4.18.
ci-contre permet de com-
prendre comment fonctionne
un IMEL.
Le gnrateur donde produit
une onde qui est spare en
deux faisceaux (qui sont
donc en phase) dirigs lun
vers le rflecteur et lautre
vers un appareil comparateur
de phase. Cest laide de cet
appareil quest dtermin le
dphasage entre londe initiale et londe ayant effectu le trajet aller-retour au rflecteur.
Fig. 4.17. : Modulation
en amplitude
Fig. 4.18. : Schma fonctionnel dun IMEL
Topographie et topomtrie - S. Milles, J. Lagofun
MESURES DE DISTANCE 169
partir de quelle valeur de V une erreur de 2 mm apparat-elle sur Di pour un
excentrement de e = 5 cm ?
partir de V = 97,5 gon. Cette erreur passe 1 cm pour V = 87,2 gon.
En conclusion, lexcentrement doit tre rduit au minimum. Si lexcentrement nest pas
nul, lerreur quil engendre doit tre prise en compte dans les mesures de prcision.
Remarque
Les appareils modernes intgrent lIMEL directement dans leur optique, rduisant
ainsi lexcentricit zro. Les distancemtres vendus sparment fonctionnent avec
des miroirs spciaux dont le centre de vise est dcal vers le bas par rapport au centre
du miroir de la mme valeur que le centre de lIMEL est dcal du centre de loptique.
Ceci permet daligner lIMEL directement sur le miroir en visant le centre de la cible
dans loptique du thodolite. Par exemple, soit un distancemtre DI4L mont sur un
thodolite T16, sur un T2 ou un T2000 avec un miroir ressemblant celui schmatis
sur la figure 4.21., la croix centrale est dcale vers le bas de la valeur e = e.
6.2.7 Forma du rIIarIaur
Si la puissance de lmetteur est suffi-
sante, une simple paroi rflchissante
(paroi lisse en bton, acier, verre, etc.)
peut tre suffisante pour effectuer la
mesure (en particulier pour les appareils
laser grce leur puissance dmission).
Pour assurer une importante autonomie
aux appareils qui fonctionnent sur batte-
ries portables, lnergie lmission doit
tre la plus faible possible. On utilise
donc un rflecteur spcial qui est un
prisme rhombodrique, coin de cube
tronqu pour limiter sa fragilit au niveau
des coins, ou prisme trirectangle.
Ce systme est le plus utilis en raison de
sa simplicit de fabrication et de la pro-
prit suivante : tout rayon lumineux
subit une rflexion sur trois faces rfl-
chissantes (formant un tridre rectangle)
et est renvoy paralllement lui-
mme (vue de dessus de la figure 4.22.).
Application
Rponse
Fig. 4.22. : Dtail dun miroir
Topographie et topomtrie - S. Milles, J. Lagofun
MESURES DE DISTANCE
M808 k88I8I Fk8 8kIllII [6F8)
La technologie GPS (Global Positionning System), en plein dveloppement, permet
dobtenir directement les coordonnes godsiques dun point stationn (une seule
antenne sur un point) mais avec une prcision mdiocre, inutilisable en topographie. Si
lon dispose de deux antennes, on obtient avec prcision la distance entre les deux points
et lorientation du vecteur mesur (fig. 4.28. et chap. 7 1). Dans ce cas, on parle de
mesure par translocation, cest--dire de report des informations d'un point vers un autre
point. A tant connu, on mesure par GPS X, Y et Z et on en dduit que X
B
= X
A
+ X,
Y
B
= Y
A
+ Y, Z
B
= Z
A
+ Z.
Les coordonnes sont initialement calcules dans un rfrentiel cartsien gocentrique
(voir chap. 2 2.2.3.1) et doivent ensuite tre transformes en coordonnes planes en
projection. Lellipsode de rfrence est aussi diffrent : cest lellipsode international
IAGRS80 (trs proche de GRS80) sur lequel sappuie le systme gocentrique WGS 84
(World Godtic System, datant de 1984). Il faut ainsi prvoir des transformations de
coordonnes, dont se charge gnralement le logiciel livr avec les antennes rceptrices
(voir chap. 2 3.4).
La prcision obtenue sur les coordon-
nes dun point en mode diffrentiel
(deux antennes) est de lordre du cen-
timtre en planimtrie sur des dis-
tances de plusieurs dizaines de
kilomtres et de quelques centimtres
en altimtrie cause essentiellement
du problme de rfrence en altitude
(voir chapitre 7).
Fig. 4.28. : Mesure GPS
Topographie et topomtrie - S. Milles, J. Lagofun
TECHNIQUES DIMPLANTATION 397
9
TECHNIQUES
DIMPLANTATION
Limplantation est lopration qui consiste reporter sur le terrain, suivant les indications
dun plan, la position de btiments, daxes ou de points isols dans un but de construction
ou de reprage. La plupart des tracs dimplantation sont constitus de droites, de
courbes et de points isols.
Les instruments utiliss doivent permettre de positionner des alignements ou des points :
thodolites, querres optiques, rubans, niveaux, etc. Linstrument choisi dpend de la
prcision cherche, elle-mme fonction du type douvrage implanter : prcision milli-
mtrique pour des fondations spciales, centimtrique pour des ouvrages courants, dci-
mtriques pour des terrassements, etc. Les principes suivants doivent tre respects :
G aller de lensemble vers le dtail ce qui implique de sappuyer sur un canevas existant
ou crer ;
G prvoir des mesures surabondantes pour un contrle sur le terrain.
1 IMFlk8IkII088 0'klI68M8I8
Un alignement est une droite passant par deux points matrialiss au sol.
1.1 Iracer 0ae erea4Ic0IaIre 0a aIIaemeat exIstaat
1.1.1 ku ruban
On cherche tracer la perpendiculaire lalignement AB passant par C (fig. 9.1.).
Pour cela, on utilise les proprits du triangle isocle ou du triangle rectangle.
Topographie et topomtrie - S. Milles, J. Lagofun
398 TECHNIQUES DIMPLANTATION
1.1.1.1 Trlaagle lsacle
Soit deux points D et E situs une
gale distance de part et dautre de
C ; tout point P situ sur la perpendi-
culaire est quidistant de D et de E ;
on construit un triangle isocle DPE.
Pratiquement, si lon dispose dun
ruban de 30 m, un aide maintient
lorigine du ruban en D, un autre aide
maintient lextrmit du ruban en E
et loprateur joint les graduations
13 m et 17 m, ou 14 m et 16 m, etc.
(fig. 9.1. gauche).
Si lon ne dispose que dun seul aide, on peut marquer au sol un arc de cercle de centre
D et de rayon 15 m et prendre lintersection avec un arc de cercle de mme rayon centr
en E (fig. 9.1. droite).
Le contrle est effectu en vrifiant que BP
2
= BC
2
+ CP
2
.
1.1.1.2 Trlaagle reclaagle
Les trois cts a, b et c dun triangle
rectangle vrifient a
2
= b
2
+ c
2
(a
tant lhypotnuse). Cette relation est
aussi vrifie par les nombres sui-
vants : 5
2
= 4
2
+ 3
2
.
Donc, si lon positionne un point D
sur AB 3 m de C, un point P de la
perpendiculaire sera distant de 4 m
de C et de 5 m de D.
Cette mthode est aussi appele
mthode du 3-4-5 . Elle sappli-
que aussi pour des longueurs quel-
conques mais ncessite alors lemploi de la calculatrice. Dautrea suites de chiffres
possibles sont 10
2
= 8
2
+ 6
2
, 15
2
= 12
2
+ 9
2
, etc. (multiples de 3, 4 et 5).
Pratiquement, si lon dispose dun ruban de 30 m, un aide maintient lorigine du ruban
en D, un autre aide maintient lextrmit du ruban en C et loprateur maintient ensemble
les graduations 5 m et 26 m du ruban (fig. 9.2. gauche).
Si lon ne dispose que dun seul aide, on peut marquer au sol un arc de cercle de centre
D et de 5 m de rayon et prendre lintersection avec un arc de cercle de 4 m de rayon centr
en C (fig. 9.2. droite).
Fig. 9.1. : Tracer une perpendiculaire au ruban
Fig. 9.2. : Tracer une perpendiculaire au ruban
Topographie et topomtrie - S. Milles, J. Lagofun
TECHNIQUES DIMPLANTATION 399
On contrlera que AP
2
= AC
2
+ CP
2
.
Remarque
Ces mthodes permettent aussi
dabaisser le pied de la perpendicu-
laire AB passant par un point C
donn; il suffit de permuter les
rles des points C et P (fig. 9.3.).
Ces mthodes ne sont valables
quen terrain rgulier et peu prs
horizontal.
1.1.2 kvar una quarra opIIqua
Lquerre optique est dcrite au chapitre 8, paragraphe 2.3.5.
1.1.2.1 Meaer uae ereaJlculalre Jeuls ua alal 6 Je lallgaemeal A8
On place un jalon en A et en B (fig.
9.4.). Loprateur se place la verti-
cale du point C avec lquerre
optique et aligne visuellement les
jalons de A et B dans lquerre.
Ensuite, il guide le dplacement dun
troisime jalon tenu par un aide
jusqu ce que limage de ce jalon
soit aligne avec les deux premiers.
Laide pose alors son jalon et obtient
un point P de la perpendiculaire.
1.1.2.2 Ahalsser uae ereaJlculalre Jeuls ua alal 6 exlrleur A8
On dispose trois jalons sur A, B et C
(fig. 9.5.). Loprateur se positionne
au moyen de lquerre sur laligne-
ment AB en alignant les images des
deux jalons de A et B puis se dplace
le long de AB jusqu aligner le troi-
sime jalon avec les deux premiers.
Lorsque lalignement est ralis, il
pose la canne plomber et marque le
point P, pied de la perpendiculaire
AB passant par C.
Fig. 9.3. : Abaisser une perpendiculaire
Fig. 9.4. : querre optique
Fig. 9.5. : querre optique
Topographie et topomtrie - S. Milles, J. Lagofun
400 TECHNIQUES DIMPLANTATION
Lquerre optique peut sutiliser en terrain accident et donne des rsultats dautant plus
prcis que les points sont plus loigns.
1.1.3 kvar un IhodoIIIa
ou un nIvaau quIp d'un rarrIa horItonIaI
Si le point donn C est sur lalignement AB (fig.
9.4.), il suffit de stationner C, de viser A (ou B)
et de pivoter lappareil de 100 gon (ou 300 gon).
Si le point C est extrieur lalignement AB
(fig. 9.6.), une possibilit consiste construire
une perpendiculaire dessai en stationnant un
point M de lalignement AB, choisi vue proche
de la perpendiculaire cherche. Loprateur
mesure la distance d sparant la perpendiculaire
dessai et le point C et construit le point P sur
AB en se dcalant de la mme distance d. Il
obtient une prcision acceptable en rptant
lopration deux ou trois fois.
Une deuxime possibilit est de stationner en B (ou en A) et de mesurer langle = CBA.
Il faut ensuite stationner sur C et implanter la perpendiculaire AB en ouvrant dun angle
de 100 depuis B. Il reste construire lintersection entre lalignement AB et la
perpendiculaire issue de C (voir 2.3).
On contrlera que AC
2
= AP
2
+ PC
2
.
Une troisime possibilit est de placer un point
E au milieu de AB (fig. 9.7.) puis de stationner
en C et mesurer les angles
1
et
2
. On en dduit
langle ouvrir sur le thodolite pour obtenir
la direction perpendiculaire AB en rsolvant
lquation suivante :
Linconvnient de cette mthode est que la rso-
lution de cette quation ne peut seffectuer que
par approximations successives. La dmonstra-
tion et la rsolution de cette quation sont pr-
sentes au chapitre 5 du tome 2, paragraphe 11.
Fig. 9.6. : Implantation au thodolite
Fig. 9.7. : Implantation au thodolite
1
2
+ + ( ) cos
cos
------------------------------------------
1
sin
2
sin
------------- =
Topographie et topomtrie - S. Milles, J. Lagofun
TECHNIQUES DIMPLANTATION 401
1.2 Iracer 0ae araIIIe 0a aIIaemeat exIstaat
tant donn un alignement AB, on cherche construire une parallle AB passant par
un point C ou une distance d donne de AB : le point C est alors positionn sur une
perpendiculaire situe une distance d de lalignement AB.
1.2.1 Trar da daux parpandIruIaIras
Loprateur construit au moyen dune
des mthodes traites au paragraphe 1.1
le point P, pied de la perpendiculaire
AB passant par C, puis la perpendicu-
laire CP passant par C : cette dernire
est parallle AB (fig. 9.8. gauche).
Si lon peut mesurer la longueur CP, on
peut aussi reporter cette longueur sur
une perpendiculaire AB passant par B
(ou A) : on obtient le point C, et la
droite CC est parallle AB (fig. 9.8.
droite).
On contrlera que PC = CB.
1.2.2 FaraIIIogramma
Les diagonales dun paralllogramme se coupent en
leur milieu. On peut utiliser ce principe et construire le
point D au milieu de lalignement CA (fig. 9.9.). On
construit ensuite le point E en prolongeant DB (DB =
DE). La droite CE est parallle AB puisque ABCE
est un paralllogramme. Ceci peut aussi tre fait
partir de points quelconques sur lalignement AB.
Le contrle est effectu en vrifiant que la perpendi-
culaire EC passant par A est de longueur d.
Une construction quivalente peut tre faite en se
basant sur les proprits des triangles semblables.
1.2.3 kngIas aIIarnasInIarnas
Si lon dispose dun thodolite, on peut stationner le point A et mesurer langle = CAB.
On stationne ensuite en C et on ouvre de langle partir de la ligne CA (fig. 9.10.) pour
obtenir la direction CC parallle AB.
Fig. 9.8. : Trac dune parallle
Fig. 9.9. : Trac dune parallle
Topographie et topomtrie - S. Milles, J. Lagofun
TECHNIQUES DIMPLANTATION 403
la distance AB = d et implanter F sur la perpendiculaire AB issue de B la distance BF
= AE + d.tan. On obtient lalignement EF cherch.
On contrlera que EB = et AF = .
1.4 Faa co0 r0IIer
On rencontre cette situation par exemple dans les
angles de rue. Limplantation est ralise partir
de la dtermination du point S construit linter-
section du prolongement des faades. Connais-
sant AB, on peut calculer SA et SB de deux
manires (fig. 9.11-2.) :
G si lon connat langle :
G si est inconnu, on positionne deux points M
et N sur SA et SB tels que SM = SN, puis on
mesure la distance MN et on en dduit que :
1.5 1aIoaaemeat saas ohstacIes
Le jalonnement est lopration consistant positionner un ou plusieurs jalons sur un
alignement existant, soit entre les points matrialisant cet alignement, soit en prolonge-
ment de lalignement.
On dsire implanter un jalon P 15 m du
point A sur lalignement AB (fig. 9.12.).
A et B sont distants de plus de 50 m et
lon ne dispose que dun ruban de 20 m.
On place un jalon sur chacun des deux
points A et B ; chaque jalon est rgl ver-
ticalement au moyen dun fil plomb ; si
lon ne dispose pas dun fil plomb, on
peut saider des faades de btiments voi-
sins pour un rglage visuel ; loprateur
se place quelques mtres derrire le jalon A et, en alignant visuellement A et B, il fait
placer un jalon par un aide au point C sur AB moins de 20 m de A. Il ne reste plus qu
tendre le ruban entre A et C pour implanter P 15 m de A.
d
2
h / cos ( )
2
+ d
2
h/ d tan + cos ( )
2
+
Fig. 9.11-2. : Pan coup rgulier
SA SB
AB
2 / 2 ( ) sin
-------------------------- = =
SA SB SM
AB
MN
--------- = =
Fig. 9.12. : Jalonnement
Topographie et topomtrie - S. Milles, J. Lagofun
404 TECHNIQUES DIMPLANTATION
La mme opration peut tre effectue avec une lunette stationne en A ou en B.
Loprateur doit viser, si possible, les points au sol pour tre le plus prcis possible. Lors
de lalignement vue, il doit donc saccroupir.
Il est aussi possible dutiliser une
querre optique (fig. 9.13.).
Loprateur se place entre A et B, les
paules parallles la direction AB. Il se
dplace perpendiculairement la direc-
tion AB jusqu observer lalignement
des deux jalons en A et B dans lquerre
optique. Il pose alors la canne plomber
de lquerre au sol et marque le point C.
1.6 1aIoaaemeat avec ohstacIe
1.6.1 FranrhIssamanI d'una buIIa
Le relief entre A et B fait que lon ne peut
pas voir B depuis A (fig. 9.14.). Lopra-
teur plante un premier jalon en 1, visible
de A et B, puis laide plante un jalon en 2,
visible de B et situ sur lalignement A-1.
Et ainsi de suite (3, 4, etc.), jusqu obtenir
un parfait alignement en C et D : cette
mthode est appele procd Fourrier.
Avec un thodolite et pour des alignements
de trs grande porte, on peut procder
comme suit (fig. 9.15.) :
G stationner un thodolite au point 1 situ vers le milieu de lalignement AB puis
mesurer langle A1B (
1
) ;
G dplacer ensuite la station de 1 vers 2 et mesurer langle A2B (
2
) : 1-2 est perpendi-
culaire lalignement AB ( vue ou bien avec une querre optique) et de longueur
Fig. 9.13. : Jalonnement lquerre optique
Fig. 9.14. : Jalonnement sans visibilit
Fig. 9.15. : Alignement au thodolite
Topographie et topomtrie - S. Milles, J. Lagofun
TECHNIQUES DIMPLANTATION 405
fixe. On peut ensuite calculer la distance sparant le point 2 du point C situ sur
lalignement :
On vrifie enfin en station en C que langle ACB pour valeur 200 gon. Suivant la
prcision cherche, on recommence ou non la manipulation.
Si lon peut mesurer les distances 1-A et 1-B, on peut calculer langle = 1AB en
rsolvant le triangle 1AB dont on connat un angle et les deux cts adjacents cet angle
(voir tome 2, chap. 5, 4.3.1). En station au point A, on implante le point C cherch en
ouvrant de langle depuis le point 1.
1.6.2 6onIournamanI d'un obsIarIa
Un btiment sur lalignement AB
empche le jalonnement (fig. 9.16.).
On matrialise un nouvel aligne-
ment AA contournant lobstacle et
sur lequel on abaisse BB perpendi-
culaire AA avec une querre
optique (voir 1.1.2.2). On mesure
ensuite les distances BB et AB.
On choisit deux points C et D sur lalignement auxiliaire AB tels que les perpendicu-
laires CC et DD passent de chaque ct de lobstacle. On mesure les distances AC et
AD et on en dduit que : et
On implante C et D sur la perpendiculaire AA puis on positionne enfin C et D.
Si lon dispose dun thodolite, on peut
stationner un point M quelconque depuis
lequel on voit A et B et mesurer langle
AMB () ainsi que les distances AM et
BM (fig. 9.17.). On peut alors calculer
les angles
1
ou
2
. Ensuite, on stationne
sur A (ou B) puis, le zro des angles
horizontaux tant fix sur M, on ouvre
de langle (400
1
) (ou bien
2
depuis
B). On peut crire (fig. 9.17.) :
AC D
C 1
1
/ 2 ( ) tan D
C 2
2
/ 2 ( ) tan = =
D
C 1
D
C 2
D
2 1
+ =
D
C 2
D
2 1
1
/ 2 ( ) tan
2
/ 2 ( ) tan
1
/ 2 ( ) tan
-------------------------------------------------------- =
Fig. 9.16. : Contournement dobstacle
CC AC
BB
AB
---------- = DD AD
BB
AB
---------- =
Fig. 9.17. : Contournement dobstacles
1
sin
BM
-------------
200
1
( ) sin
AM
-------------------------------------------
1
+ ( ) sin
AM
---------------------------- = =
Topographie et topomtrie - S. Milles, J. Lagofun
406 TECHNIQUES DIMPLANTATION
Si les obstacles sont tels que lon ne puisse
pas trouver de point M depuis lequel A et B
sont visibles, il faut alors effectuer un
cheminement polygonal de A vers B
(fig. 9.18.) dans le but de calculer langle
(voir cheminements, tome 2, chap. 2, 1).
Grce au cheminement A-1-2-B, on calcule
les coordonnes (x
B
; y
B
) du point B dans le
repre local Axy (origine A, angle affich
sur le premier ct de 100 gon).
On peut ensuite en dduire que :
Si lon ne dispose pas dun thodolite, on
peut aussi utiliser la mthode suivante base
uniquement sur des mesures linaires
(fig. 9.19.) :
Pour construire P sur AB, on lve deux per-
pendiculaires AB, AA et BB, les points A
et B tant choisis tels quon puisse mesurer
AB.
On mesure AA et BB ainsi que AB. Les
triangles AA P et BB P sont semblables
donc on peut crire :
par suite
Grce cette cote, on place P sur lalignement auxiliaire AB.
On contrlera que PB = A B AP.
donc :
AM
1
sin BM
1
sin cos sin
1
cos + ( ) =
1
cot
AM
BM sin
----------------------- cotan =
Fig. 9.18. : Contournement dobstacles
tan
x
B
x
A
y
B
y
A
---------------- =
Fig. 9.19. : Contournement dobstacles
AP
AA
----------
BP
BB
---------
AP BP +
AA BB +
--------------------------
AB
AA BB +
-------------------------- = = =
AP
AA AB
AA BB +
-------------------------- =
Topographie et topomtrie - S. Milles, J. Lagofun
TECHNIQUES DIMPLANTATION 407
1.7 FroIoaemeat 4'0a aIIaemeat
1.7.1 FroIongar sans obsIarIas
Si lon procde vue, le procd est identique au jalonnement sans obstacle expos au
paragraphe 1.5. Pour viter une perte de prcision, il ne faut viter de prolonger un
segment de plus du quart de sa longueur.
Si lon dispose dun niveau avec un cercle horizontal gradu, on peut stationner un des
deux points de lalignement prolonger, puis fixer le zro du cercle sur lautre point, et
faire pivoter le niveau de 200 gon.
Si lon dispose dun thodolite et que lon
recherche une grande prcision, on peut
(fig. 9.20.) stationner un des deux points de
lalignement prolonger (B), pointer lautre
(A) et basculer la lunette autour de laxe des
tourillons. Ceci donne un point P1. On
effectue ensuite un double retournement :
cela donne un point P2. Si P1 et P2 ne sont pas confondus, le point cherch P est au milieu
du segment P1-P2 ; ce procd est aussi utilis pour rgler un thodolite (voir chap. 3,
2.3.4). Si le thodolite utilis est parfaitement rgl, P1 et P2 sont confondus aux
imprcisions de mesure et de mise en station prs.
1.7.2 FroIongar audaI d'un obsIarIa
Lalignement AB doit tre prolong au-del dun obstacle.
Si lon ne dispose pas dun thodolite,
on peut construire un alignement A B
parallle AB une distance d suffi-
sante pour contourner lobstacle. On
revient sur le prolongement de lali-
gnement AB en construisant laligne-
ment parallle A B la distance d
(fig. 9.21.).
Si lon dispose dun thodolite en sta-
tion sur A, on implante un point E per-
mettant de contourner lobstacle, on
mesure langle = BAE et la distance
d = AE. Ensuite, en station E, on ouvre
de langle (200 2.) depuis A pour
obtenir la direction EC sur laquelle on
reporte la distance d : cela donne le
point C. Enfin en station en C, on
Fig. 9.20. : Prolonger un alignement
Fig. 9.21. : Prolongement au-del dun obstacle
Fig. 9.22. : Prolongement au-del dun obstacle
Topographie et topomtrie - S. Milles, J. Lagofun
416 TECHNIQUES DIMPLANTATION
Point daxe des poteaux P
1
et P
4
: POINT -2.55,7.61 et POINT 4.67,7.66
Retour au SCU gnral pour obtenir les coordonnes des axes des poteaux : SCU
Coordonnes des poteaux : pour chaque point daxe, ID NODal de
Lecture directe du tableau dimplantation: LIGNE de A vers chaque poteau (EXTrmit
de... NODal de...). LISTE puis cliquez sur les quatre droites et notez la longueur (Dh)
et langle dans le plan XY (gisement).
3 IMFlk8IkII08
0 8F88 klIIMI8I008
Sur un chantier, des repres altimtriques sont indispensables. Ils sont implants par des
nivellements rattachs au rseau NPF (voir chap. 2 , 1.5). On place ainsi sur le chantier
plusieurs bornes ou repres de nivellement qui doivent tre rpartis sur lemprise du
chantier et positionns de sorte quils restent en place pendant la dure des travaux. Le
plus simple est de niveler les points qui servent aussi de rfrence en planimtrie. En
thorie, un seul repre de nivellement est ncessaire ; dans la pratique, il est prfrable
den implanter plusieurs.
3.1 Fose 4'0a traIt 4e aIvea0
Les repres de nivellement ser-
vent dorigine des chemine-
ments courts ou des vises
directes permettant de placer
des repres daltitude en cotes
entires appels traits de niveau.
On les ralise au cordex sur des
murs existants, des piquets, etc.
Par exemple, pour raliser
limplantation du trait de niveau
110,00 m sur un mur existant
(fig. 9.32.), on stationne le
niveau mi-distance entre le
mur et le repre altimtrique A
le plus proche. On vise une mire
en A et lon en dduit laltitude
du plan de vise :
H
plan de vise
= H
A
+ L
mire
Fig. 9.32. : Pose dun trait de niveau
Topographie et topomtrie - S. Milles, J. Lagofun
TECHNIQUES DIMPLANTATION 417
Ici, H
P
= 107,94 + 1,78 = 109,72 m. Loprateur vise ensuite le mur sur lequel un aide
dplace un mtre de poche jusqu ce que loprateur lise la graduation 28 cm (110
109,72) sur le mtre. Laide place alors un trait sur le mur. On rpte la dernire opration
plus loin et lon joint les deux repres au cordex pour obtenir le trait de niveau.
3.2 8IveIIemeat 4e chaIses 4'ImIaatatIoa o0 4e Ig0ets
Il est intressant de disposer sur
tous les piquets un trait de
niveau et de rgler les chaises
la mme altitude pour viter
ainsi les erreurs dans les reports
de distance dues aux diff-
rences daltitude.
Les piquets (ou les chaises)
tant en gnral sous le plan de
vise, on ne peut pas y poser
facilement un mtre de poche
(comme sur le mur, de la figure
9.32.). On nivelle donc le
sommet du piquet par un nivel-
lement par rayonnement avec
vise arrire sur un point de rfrence du chantier et lon reporte au mtre de poche le
trait de niveau sur le piquet ; sil sagit dune chaise, on rpte cette opration pour les
deux piquets et lon cloue la latte horizontale de la chaise.
Par exemple, sur la figure 9.33., le repre A est laltitude H
A
= 107,94 m ; on place une
mire sur A (L
A
= 1,78 m) puis sur le piquet P
1
(L
P1
= 1,66 m). Laltitude de la tte du
piquet est donc H
P1
= 107,94 + (1,78 1,66) = 108,06 m. On dsire placer les chaises
laltitude 108,00 m. On trace donc un trait de niveau situ 6 cm sous la tte du piquet.
Aprs avoir fait la mme chose pour lautre piquet, on fixe la latte horizontale de la
chaise.
3.3 0tIIIsatIoa 4es aareIIs Iaser
Un laser met un faisceau lumineux qui se disperse trs peu : le diamtre du faisceau
lumineux mis est de lordre du millimtre 100 m, et permet donc de matrialiser un
axe (laser fixe) ou un plan (laser tournant). En projetant lmission du laser fixe sur un
obstacle, on obtient un point dun alignement. En projetant lmission du laser tournant
sur un mur, on obtient un trait de niveau ; on peut aussi incliner le laser pour obtenir des
lignes de pente donne jusqu des contrles de verticalit. Aprs avoir dtermin lalti-
tude de la station de lappareil, on peut lutiliser pour remplacer le trait de niveau ou pour
matrialiser un alignement. Les oprations de nivellement peuvent alors tre ralises par
un seul oprateur. Ces appareils sont dcrits plus en dtail au chapitre 7, paragraphe 4.
Fig. 9.33. : Nivellement de chaises ou de piquets
Topographie et topomtrie - S. Milles, J. Lagofun
418 TECHNIQUES DIMPLANTATION
4 IMFlk8IkII08 0'08 8kIIM8I
4.1 8tImeats co0raats
Il sagit des btiments de petites et moyennes dimensions (villas, petits immeubles, etc.)
gnralement fonds superficiellement, cest--dire de faibles profondeurs par rapport
au dernier niveau excav.
4.1.1 FIquaIaga da I'amprIsa das IarrassamanIs
On matrialise cette emprise par
les limites extrieures des terrasse-
ments, axes AA, BB, CC, etc. de
la figure 9.34., les piquets tant
placs en dehors de la zone ter-
rasser.
Pratiquement, le piquetage est ra-
lis par les mthodes traites aux
paragraphes 1 et 2 en sappuyant
sur des repres connus ou sur les
btiments voisins, ou encore sur
les constructions du domaine
public. Lors de lexcution des ter-
rassements, on contrle la progres-
sion par nivellement rgulier du
fond de fouilles en sappuyant sur
un repre de nivellement.
4.1.2 FosIIIonnamanI das rhaIsas d'ImpIanIaIIon
Une chaise dimplantation (fig. 9.35.) est consti-
tue dune latte horizontale fixe deux piquets.
La face suprieure de la latte horizontale est posi-
tionne une altitude donne (trait de niveau) et
on y plante des clous qui matrialisent les axes de
la construction. Les chaises sont donc places
autour de la construction, en retrait, de manire
ne pas gner les travaux (fig. 9.36.). De plus, il
faut veiller rgler les lattes de chaque chaise
dun mme axe la mme altitude. Ces altitudes
sont dcales de quelques centimtres (5 cm par
exemple) dune paire de chaise lautre pour viter les interfrences entre cordeaux.
Fig. 9.34. : Piguetage dun terrassement
Fig. 9.35. : Chaise dimplantation
Topographie et topomtrie - S. Milles, J. Lagofun
TECHNIQUES DIMPLANTATION 419
Les chaises matrialisent en
gnral laxe longitudinal du bti-
ment, laxe des fondations ou des
murs implanter (fig. 9.36.).
Elles sont plantes en retrait de la
zone de travaux (1 2 m) et les
cordeaux ou fils de fer tendus
entre les chaises reprsentent les
axes implanter (fig. 9.36. et
9.37.).
Le positionnement des chaises est
ralis comme suit : dans le
repre local associ au chantier,
souvent une simple ligne de base
ou un ouvrage existant, lopra-
teur calcule la position de deux points daxe quil reporte sur le terrain. Par exemple les
points D et E (fig. 9.36.) placs partir de la ligne de base AB en prenant les cotes sur le
plan dimplantation du btiment. Les autres axes sont construits par jalonnement (aligne-
ments, perpendiculaires, parallles, etc.) partir de laxe DE. Il en dduit la position des
chaises en prolongeant les alignements.
4.1.3 aporI das poInIs d'axa an Iond da IouIIIas
Les points daxe sont reports au sol sur le bton de propret en fixant un fil plomb
lun des cordeaux. Les points dintersection des axes sont obtenus de mme en faisant
coulisser le fil plomb attach un cordeau jusqu ce quil touche un cordeau perpen-
diculaire (fig. 9.37.).
Fig. 9.36. : Position des chaises dimplantation
Fig. 9.37. : Report de points daxe en fond de fouilles
Topographie et topomtrie - S. Milles, J. Lagofun
420 TECHNIQUES DIMPLANTATION
4.1.4 LxampIa d'ImpIanIaIIon
Le plan de masse de la construction
(fig. 9.38.) prcise le retrait d
1
du bti-
ment par rapport lalignement public
(route) ; d
1
doit tre suprieur une
valeur minimale fixe par les services
publics. Le plan de masse prcise aussi
la distance d
2
la limite de proprit
voisine ; d
2
est, elle aussi, suprieure
une valeur minimale. Il fixe en outre
lorientation du btiment par langle
entre son axe longitudinal et laligne-
ment public servant de rfrence.
Plusieurs mthodes sont possibles :
1 - Sur un terrain rgulier et peu prs horizontal, construisez avec un ruban et des jalons
lalignement DH parallle la limite de proprit la distance d
2
. Construisez laligne-
ment AH parallle lalignement public la distance d
1
, puis dduisez en le point H
dintersection de ces alignements. Reportez la distance h.sin depuis H vers le point A
et la distance h.cos vers le point D. Construisez ensuite lalignement BA en implantant
langle depuis lalignement AH (voir 1.3). BC et CD sont enfin parallles AD et
AB des distances L et h.
2 - En terrain plus accident il est pr-
frable de procder avec un ruban et
une querre optique : calculez les coor-
donnes rectangulaires des points A, B,
C et D dans le repre (S,x,y) (fig. 9.39.)
et implantez ces points par abscisses et
ordonnes (voir 2.1).
Il faut dabord positionner S partir de
la borne B :
D
SB
= d
2
+ h.sin d
1
.cotan.
Les coordonnes des points implanter
sont les suivantes :
A ( d
1
. cotan ; d
1
)
B ( d
1
. cotan L. cos ; d
1
+ L. sin)
C ( d
2
L. cos ; d
1
+ h. cos + L. sin)
D ( d
2
; d
1
+ h. cos)
Fig. 9.38. : Exemple gnral
Fig. 9.39. : Repre local dimplantation
Topographie et topomtrie - S. Milles, J. Lagofun
TECHNIQUES DIMPLANTATION 421
3 - En terrain trs accident, il vaut mieux utiliser un thodolite et un ruban ou un
distancemtre: partir des coordonnes de A, B, C et D dans le repre (S,x,y), implanter
en coordonnes polaires depuis une station en S, rfrence en B.
Remarque
Si le terrain prsente des dniveles importantes par rapport aux distances horizontales
implanter, il faut en tenir compte dans les distances reporter : pour cela, on reporte
la distance suivant la pente Dp = , la dnivele H tant mesure par
nivellement direct ou indirect (voir les chapitres 5 et 6).
Dans tous les cas, il faut contrler les cotes extrieures du btiment et les diagonales.
4.2 8tImeats s0r foa4atIoas scIaIes, o0vraes 4'art
La prcision ncessaire limplantation des fondations de ce type douvrage (fondations
profondes ou semi-profondes, certaines fondations du type micro pieux ncessitant des
prcisions de lordre du millimtre...) oblige utiliser essentiellement le thodolite,
dautant que ce type de chantier est toujours de grande tendue. Une station totale est
alors recommande. Limplantation seffectue par rayonnement depuis un micro canevas
de stations dtermines en repre gnral ou local. Les points implanter sont calculs
dans le repre utilis pour le chantier partir des indications des plans dexcution. Les
prcisions respecter sont de lordre de 1 2 cm en planimtrie et de 1 cm en
altimtrie. Lexercice du paragraphe 2.5 est reprsentatif de ce type dimplantation.
4.3 8tImeats 4e raa4e ha0te0r
Les problmes spcifiques ce type de btiments sont le report de repres dans les tages
(altimtrie et planimtrie). En effet, pour un btiment de hauteur moyenne, on peut se
contenter dutiliser les axes (ou les nus extrieurs) des lments porteurs de ltage
infrieur et de les reporter par de simples mesures au mtre de poche sur le plancher de
ltage suprieur. Pour de trs grandes hauteurs (au-del de la dizaine dtages), le cumul
des erreurs de report chaque niveau peut entraner des dcalages trop importants en fin
douvrage, dcalages gnralement plus nuisibles du point de vue esthtique que du point
de vue de la rsistance de louvrage.
4.3.1 aporI da rapras pIanImIrIquas an Iagas
Parmi les solutions possibles, citons les suivantes :
1 - Translation des repres planimtriques de ltage infrieur vers ltage suprieur. Il
faut mnager des trmies de 20 cm 20 cm la verticale des points de repre. Ces
derniers sont au minimum au nombre de deux afin de disposer dune base dimplantation
complte ltage suprieur. On stationne ensuite un thodolite sur le point de rfrence
ltage infrieur (point A, fig. 9.40.) ; pour tre plus prcis, il faut reprendre chaque
Dh ( )
2
H ( )
2
+
Topographie et topomtrie - S. Milles, J. Lagofun
422 TECHNIQUES DIMPLANTATION
fois la rfrence au rez-de-chausse, ce qui oblige laisser les trmies jusquau dernier
tage. Ensuite, au moyen dun oculaire coud, on vise au znith pour guider un aide qui
positionne une plaque sur la trmie suprieure. On peut aussi stationner ltage sup-
rieur la verticale du point de ltage infrieur en saidant du plomb optique et posi-
tionner ensuite une plaque sur la trmie (point B, fig. 9.40.). On y grave la position du
repre. Notez que le plomb optique doit tre parfaitement rgl (voir chap. 3, 2.3.3).
Le reprage altimtrique peut tre ralis par mesures linaires, au ruban, depuis les
tages infrieurs. Il est galement possible de contrler laltitude dun plancher par des
vises de nivellement indirect depuis des stations extrieures au btiment (voir chap. 3,
7.4).
2 - Utilisation dune lunette nadiro-znithale (lunette
Wild ZNL) : cest une lunette daplomb rigide, prcise et
rsistante qui permet de faire des vises vers le haut ou
vers le bas par simple retournement de la lunette qui se
monte en centrage forc dans une embase Wild. Le calage
des lignes de vise est effectu par une seule nivelle
double face ; la face suprieure et la face infrieure de la
nivelle sont incurves. La prcision obtenue avec deux
vises diamtralement opposes est de lordre de 1 mm
30 m pour le modle nivelle tubulaire et de 0,5 mm
100 m avec les modles automatiques ZL (lunette seule-
ment znithale) ou NL (lunette seulement nadirale). Aprs
utilisation de cette lunette, il est possible de positionner un thodolite sur la mme
embase (centrage forc assurant une remise en position au 1/100 de millimtre prs).
Fig. 9.40. : Report de points de repre en tage
Doc Leica : Lunette ZNL
Topographie et topomtrie - S. Milles, J. Lagofun
TECHNIQUES DIMPLANTATION 423
3 - Utilisation dun fil plomb de grande longueur dont lextrmit baigne dans un bain
dhuile pour le stabiliser. La mthode, apparemment simple, est difficile mettre en
uvre en pratique (surtout sil y a du vent). Un autre procd quivalent, plus prcis et
surtout plus facile mettre en uvre, est lutilisation dun fil flotteur (fil en acier
travaillant sous tension constante et fix un flotteur immerg dans un bain de mercure ;
il se monte sur un trpied de thodolite). Cet appareil permet dobtenir une trs grande
prcision : 0,08 mm sur 27 m, mesur par lIGN dans une cage descalier ; il est toutefois
galement sensible au vent.
4.3.2 VarIIraIII das Iaadas
Les appareils laser (voir chap. 7, 4) peuvent tre utiliss pour rgler et contrler la
verticalit des lments porteurs lors de la construction. Il est par exemple possible de
positionner un laser fixe sur un mur ou prs dun mur porteur du rez-de-chausse, dcal
dune valeur d du nu extrieur de ce mur. On place une premire cible sur un nu extrieur
du premier tage pour contrler le point de passage du laser. On place enfin une cible
dcale de la mme valeur d sur un porteur en tage ou sur un coffrage, pour laligner. La
grande porte du laser et la faible dispersion de son faisceau permettent de travailler
jusqu de trs grandes hauteurs.
4.4 FIg0etae 4e eates
Limplantation dune pente donne, par exemple une voie daccs, peut tre ralise de
plusieurs manires.
1 - laide dun niveau et une mire : si la longueur de louvrage ne dpasse pas 100 m,
on peut piqueter les points daxe dune pente partir dune seule station dun niveau. Ces
points daxe sont dj placs en planimtrie. Si la pente implanter est une ligne droite,
on stationne le niveau dans son axe et on place les piquets en les alignant grce au niveau
et la mire.
Fig. 9.41. : Piquetage dune pente au niveau
Topographie et topomtrie - S. Milles, J. Lagofun
LEVER DE DTAILS ET REPORT 347
8
LEVER
DE DTAILS
ET REPORT
1 I8I80000II08
Le lever de dtails est lensemble des oprations intervenant dans un lever topogra-
phique et consistant dterminer partir des points du canevas densemble (voir Tome
2, Ch. 1), polygonal ou de dtails, la position des diffrents objets dorigine naturelle ou
artificielle existant sur le terrain. Le lev, nom donn au document rsultant dun lever,
est destin, ventuellement aprs traitement numrique, ltablissement de plans gra-
phiques ou numriques : cest la phase de report.
2 l8 0 0IkIl8
2.1 FrIacIes 4e hase
Lors dun lever de dtails, le topographe est confront trois problmes principaux :
G dterminer les dtails lever ;
G dfinir le degr de prcision ;
G arrter les mesures effectuer.
2.1.1 IaIIs Iavar
Le choix des dtails dpend essentsiellement de deux caractristiques : leur type et leur
taille. Les plans topographiques ont des destinations diffrentes et des objets ncessaires
certains seront inutiles pour dautres. Il faut donc effectuer une slection en fonction du
type de plan laborer. Par exemple, si le lever darbres est obligatoire pour un plan de
Topographie et topomtrie - S. Milles, J. Lagofun
348 LEVER DE DTAILS ET REPORT
proprit, il lest beaucoup moins pour un plan de rcolement. La taille minimale des
dtails lever est directement lie lchelle du plan. On admet en gnral que le pouvoir
sparateur de lil humain est dun dixime de millimtre. Les dtails non reprsentables
ne sont pas levs. Pour les plans numriques, susceptibles de gnrer des plans graphi-
ques diffrentes chelles, il faut se rfrer au cahier des charges.
2.1.2 FrrIsIon du Iavar
La prcision dun plan est lie celle du lever et implique directement la prcision avec
laquelle les dtails sont levs. Les plans peuvent tre classs suivant le type de lever :
expdi ou rgulier, ou en catgories, P1 P7 et A1 A7 (arrt du 21 janvier 1980).
Lchelle dun document est dfinie par la formule :
Lchelle e est donc le rapport dune dimension mesure sur le plan par la dimension
homologue sur le terrain.
Un lever est dit rgulier si la dtermination des dtails est effectue avec une erreur qui,
rduite lchelle du lev, est infrieure ou gale lerreur graphique, soit un dixime
de millimtre, plus petit cart perceptible l'il sur le plan. Dans le cas contraire, le lever
est dit expdi. Par exemple, pour un plan au 1/1 000, lerreur maximale est de 10 cm sur
le terrain (0,1 mm 1 000 10 cm).
Larrt du 21 janvier 1980 (art. 9) fixe des tolrances sur les carts individuels des points
suivant sept catgories : de P1 P7 en planimtrie, de A1 A7 en altimtrie. Par exemple,
ces tolrances sont de 10 cm en P2 et 1 m en P5. Les plans des catgories P1 et P2 doivent
tre appuys sur un canevas de prcision. Il faut noter quun mme plan peut contenir des
dtails de catgories diffrentes.
Prenons lexemple dun plan graphique :
G en planimtrie, le corps des rues est en catgorie P3, lintrieur des lots en catgorie
P4 ;
G en altimtrie, les points cots sont en catgorie A1.
Les levers doivent respecter les tolrances dfinies par le cahier des charges.
Le tableau suivant rcapitule les carts individuels en centimtre autoriss sur chaque
point ; les mesures se font par sondage sur le plan puis on les compare aux valeurs issues
du terrain
1
.
1
Voir mthodologie complte dite par le Journal Officiel : arrt du 21 janvier 1980.
e
d
plan
D
terrain
-------------- =
Topographie et topomtrie - S. Milles, J. Lagofun
LEVER DE DTAILS ET REPORT 349
On remarque sur le tableau prcdent lassociation dune catgorie et dune chelle :
G catgorie 1 : 1/100 ;
G catgorie 2 : 1/200 ;
G catgorie 3 : 1/500 ;
G catgorie 4 : 1/1 000, etc.
Cette association est aujourdhui obsolte car le plan nest plus que limage nimporte
quelle chelle du modle numrique de terrain stock sur un support informatique.
Outre ce contrle dcarts individuels, un plan doit satisfaire un contrle global,
statistique sur lensemble du plan, savoir:
Avec ei : carts individuels (les carts hors tolrance tant mis part) ;
: cart type calcul partir des tolrances du tableau prcdent ;
N : nombre de points contrls.
2.1.3 Masuras aIIarIuar
Le principe fondamental de la topographie, qui consiste aller de lensemble vers les
dtails, doit tre strictement respect : les points de dtail seront donc rattachs un
canevas, mme si celui-ci se compose uniquement de quelques points, dune simple ligne
dopration ou, la limite, dune faade, par exemple. Un lever correctement men doit
assurer un maximum dhomognit entre les diffrents points de dtails. Chacun sera
donc rattach, si possible, par un minimum de mesures courtes et indpendantes, par
exemple un angle et une distance, une distance sur un alignement, deux angles, etc.). On
noubliera pas deffectuer des mesures surabondantes de contrle.
2.1.4 6roquIs da Iav
Chaque lever de dtails doit saccompagner dun croquis de lev aussi prcis, soign et
descriptif que possible. Ce croquis est dune aide prcieuse, voire indispensable, lors de
ltablissement du plan dfinitif.
Remarquez quune bonne codification peut permettre de ne pas faire de croquis.
0otgor|es 1 2 3 4 5 7
|on|mtr|e 1 7 5 10 25 50 100 250 - 250
o|nts cots A1 A 2,5 5 10 25 50 -50
0ourbes de n|veou 01 05 25 50 75 100 -100
ei
2
N
-------------
2N 1 2 58 , + ( )
2N
------------------------------------------------ <
Topographie et topomtrie - S. Milles, J. Lagofun
350 LEVER DE DTAILS ET REPORT
2.2 Mtho4es et moyeas
Les mthodes de lever et les moyens mettre en uvre dpendent de plusieurs facteurs,
essentiellement :
G la destination du plan : graphique, numrique
G lobjet du plan : intrieur, proprit, parcellaire, alignement...
G la prcision recherche : pr-tude grossire, lever expdi, rgulier, catgories...
G de la nature du terrain : relief, masques, couvert, tendue, distance des points...
G de la disponibilit du matriel dans lentreprise ;
G du cahier des charges, du prix de revient du march et des dlais impartis.
Par la suite, ces mthodes seront classes en deux catgories :
G les mthodes traditionnelles, qui ne font lobjet que dune description sommaire car,
abondamment traites par ailleurs, elles sont peu peu abandonnes ; elles utilisent
le matriel classique du gomtre topographe : ruban, fil, roue, niveaux, cercles,
goniomtres, goniographes, thodolites, tachomtres optico-mcaniques, boussoles,
jalons, querres optiques...
G les mthodes modernes bases sur lemploi des stations totales et du GPS. Le lever
altimtrique sera trait part.
2.3 Mtho4es tra4ItIoaaeIIes
2.3.1 Lavars grossIars
Pour des phases davant-projet ou bien pour des prparations de chantier, il est suffisant
deffectuer un lever grossier qui permet de prparer le planning des oprations dfinitives
ou de calculer un cot approximatif de travaux. Les instruments la disposition du
topomtre sont les suivants :
G la boussole : elle permet dorienter un croquis sur le nord magntique du lieu (trs
proche du nord gographique) ;
G le clisimtre : cest un appareil de poche simple et peu encombrant qui permet
dobtenir rapidement une pente, une dnivele ou une distance incline avec une
prcision maximale de lordre de 0,5 % sur la pente, 50 cm sur les longueurs. Un
exemple dapplication est la prparation dune opration de mesure par GPS pour
laquelle il est ncessaire de connatre la position (azimut magntique et hauteur des
objets proches de la station prvue pour une antenne GPS, ceci dans le but de prvoir
le nombre de satellites visibles un instant donn ; voir chap. 7, 1) ;
G le podomtre (mesure par comptage des pas) ou la roue enregistreuse (roue associe
un compteur mtrique utilisable en parcours facile jusqu 10 km avec une prcision
maximale du dcimtre) ;
Topographie et topomtrie - S. Milles, J. Lagofun
LEVER DE DTAILS ET REPORT 351
G le fil perdu : il sagit dune bobine de fil donnant des longueurs de parcours jusqu
5 km avec une prcision maximale du dcimtre, utilisable en parcours trs accident.
Ces instruments ne sont pas dsuets et sont encore trs utiliss pour les mesures en terrain
accident et les mesures ne ncessitant que des ordres de grandeur.
2.3.2 Lavar d'InIrIaur
Le lever dintrieur est essentiellement
effectu au ruban ou mieux, avec un
lasermtre, par exemple le type DISTO
de Leica, dont la mesure par rayon laser
est caractrise par une porte allant
jusqu 100 m avec une prcision de
lordre du centimtre. Le lasermtre
permet de mesurer rapidement et prci-
sment avec un seul oprateur, le
deuxime se consacrant au croquis.
La seule rgle, en dehors de limportance
de la qualit des croquis, est la mesure
des diagonales de toute figure dfor-
mable (rectangle, polygone, etc.), la
figure de base indformable tant le
triangle (voir un exemple de mesurage sur la figure 8.1. : il manque sur ce croquis les
mesures des faades intrieures sud et est de cette pice).
2.3.3 Lavar da pIans
Suivant les types de points lever, il est possible dadopter les procds suivants :
G points isols, relativement loigns du canevas : loprateur peut employer les tech-
niques du canevas ordinaire avec le minimum de mesures ncessaire : intersection,
relvement, recoupement, insertion (voir Tome 2 Ch. 1) ;
G petites parcelles urbaines ou rurales : multilatration de dtail ;
G points nombreux, peu prs aligns : abscisses et ordonnes, obliques latrales et
quasi-ordonnes (corps de rue, faades...) ;
G limites de parcelles, de proprits, btiments, etc. : alignements et prolongements ;
G points sems autour des points du canevas : rayonnement (trs employ en tacho-
mtrie).
La base de la plupart de ces mthodes est la ligne dopration. Elle provient souvent dun
canevas polygonal ou dune charpente planimtrique do lintrt dun choix judicieux
des points de ce canevas.
Fig. 8.1. : Lever dintrieur
Topographie et topomtrie - S. Milles, J. Lagofun
352 LEVER DE DTAILS ET REPORT
2.3.4 MuIIIIaIraIIon da dIaII
Le principe est fond sur la mesure de distances courtes et surabondantes partir dune
ou de plusieurs lignes dopration.
En lever urbain, cette mthode convient des plans de proprit. Le matriel mis en
uvre est simple : ruban, jalons, querre optique ou thodolite. La ligne dopration
principale est, dans ce cas, perpendiculaire un ct du canevas polygonal qui sert
galement de ligne dopration (fig. 8.2.). Il faut veiller mesurer les faades des
btiments.
partir du canevas, le report peut tre direct par constructions simples ou par coordon-
nes aprs traitement numrique.
En lever rural, pour des parcelles de petites dimensions, il est possible de dcomposer la
surface en triangles, si possible quilatraux. On mesure les cts de ces triangles, les
cts de la parcelle et quelques distances supplmentaires pour le contrle.
L aussi, le report peut soprer directement, par intersections darcs de cercle ou par
coordonnes aprs traitement numrique dans le repre gnral ou local du lever.
2.3.5 kbsrIssas aI ordonnas
Lorsque les points de dtail lever sont relativement aligns et le terrain peu accident,
cette mthode donne des rsultats satisfaisants, par exemple, pour le lever de corps de
rues. Depuis chaque point, on abaisse, laide dune querre optique, des perpendicu-
laires sur une ligne doprations : par exemple un ct du canevas polygonal.
Fig. 8.2. : Multilatration en zone urbaine Fig. 8.3. : Multilatration en zone rurale
Topographie et topomtrie - S. Milles, J. Lagofun
LEVER DE DTAILS ET REPORT 353
On mesure ensuite les abscisses cumules, les ordonnes de chaque point et, pour
contrle, les distances entre ces points.
Il faut veiller au bon alignement des pieds des perpendiculaires sur la ligne doprations :
pour cela, il est recommand dutiliser un thodolite.
Le report peut se faire directement sur le plan, partir du canevas ou par coordonnes
aprs traitement numrique. Le calcul consiste alors effectuer un changement de base
pour passer du repre du lever (ct de la polygonale) au repre du canevas gnral (voir
tome 2, chap. 5, 8.2).
Une variante de cette mthode, le lever par obliques latrales et quasi-ordonnes consiste
abaisser, vue, les perpendiculaires sur la ligne dopration. On mesure les abscisses
cumules, les quasi-ordonnes, les faades et les deux cotes de rattachement aux extr-
mits. Des formules simples permettent ensuite de calculer les abscisses et ordonnes des
diffrents points. Ce procd, beaucoup plus rapide que le prcdent (perpendiculaires
vue) est galement adapt aux levers de corps de rue grande chelle.
La mthode de lever par abscisses et ordonnes est dcrite ci-dessous.
1 - Lquerre optique (fig. 8.5.) est un petit instrument
qui permet de construire rapidement des perpendicu-
laires par lalignement de jalons. Elle est associe un
fil plomb ou mieux, une canne plomber sur laquelle
elle est visse. La canne plomber est le dispositif le
plus stable : elle doit tre tenue entre pouce et index en
partie suprieure, le plus prs possible de lquerre de
manire assurer sa verticalit.
Un bon manipulateur peut obtenir une prcision centi-
mtrique, sachant que plus les jalons sont loigns et
plus le positionnement est prcis.
Fig. 8.4. : Abscisses et ordonnes
Fig. 8.5. : querre optique
Topographie et topomtrie - S. Milles, J. Lagofun
354 LEVER DE DTAILS ET REPORT
2 - Le fonctionnement de l'querre optique est le suivant : deux prismes 45 renvoient
vers loprateur limage de deux jalons placs lun, J1, 90 gauche de lquerre et
lautre, J2, 90 droite. Par une fentre situe entre les deux prismes (ou au-dessus et
au-dessous des prismes), loprateur peut voir un troisime jalon J3. Lorsque les trois
jalons sont aligns dans lil de loprateur cela signifie que la droite J1-J2 est perpen-
diculaire la droite H-J3, H tant la verticale du centre de lquerre (fig. 8.6.).
3 - Les mesures suivantes sont effectues : pour ce type de lever, loprateur matria-
lise, par exemple avec deux jalons, une ligne de base qui sert daxe (x) et pour chaque
dtail lev, il construit le pied de la perpendiculaire laxe (x) en alignant dans lquerre
limage de lobjet lever avec les deux jalons matrialisant laxe (x) (fig. 8.7.).
Fig. 8.6. : querre optique
Fig. 8.7. : Lever lquerre optique
Topographie et topomtrie - S. Milles, J. Lagofun
LEVER DE DTAILS ET REPORT 355
Pour un dtail au sol, un aide peut y tenir un troisime jalon.
Loprateur mesure labscisse cumule OH et lordonne HP du point lev qui est donc
repr en coordonnes locales. Il mesure aussi la longueur de la faade PQ (mesure
surabondante de contrle).
2.3.6 Lavar par rayonnamanI
Cette technique sapparente au lever de dtails effectu avec les stations totales : on
utilise un thodolite ou un niveau quip dun cercle horizontal pour lever la position
angulaire de chaque point. La distance horizontale du point de station au point lev est
mesure au ruban, ou, moins prcisment, par stadimtrie sur une mire.
Il est galement possible dobtenir laltitude du point vis par nivellement direct (niveau)
ou indirect (thodolite). Chaque point est alors connu :
G en planimtrie par ses coordonnes polaires par rapport au point de station et la
rfrence angulaire choisie ;
G en altimtrie par rapport un point de rfrence connu en altitude.
Le lever seffectue par rayonnement autour du point de station de lappareil. Lorienta-
tion du zro du cercle horizontal de lappareil peut tre ralise de manire approxima-
tive, avec une boussole pour se rapprocher du nord magntique et donc du nord Lambert.
Il est galement possible de sorienter de manire plus prcise si lon dispose de deux
points connus en coordonnes gnrales ou locales.
Il sagit de lever par rayonnement laide dun
niveau de chantier une parcelle pour valuer sa
surface horizontale. Cette parcelle doit tre
approximativement horizontale pour que lon
puisse utiliser un niveau en une seule station.
Un repre local est fix (fig. 8.8.) avec une
station en S, le zro du cercle tant point sur
un point de rfrence R (repre local S, x, y).
La rfrence R a une altitude : H
R
= 132,23 m ;
les coordonnes du point de station sont : X
S
= 100 m ; Y
S
= 100 m.
Le tableau des mesures est le suivant :
Application
Fig. 8.8. : Lever
par rayonnement au niveau
Topographie et topomtrie - S. Milles, J. Lagofun
356 LEVER DE DTAILS ET REPORT
Les quations suivantes permettent dtablir le tableau des rsultats.
La dnivele entre R et un point i est : H = m
R
mi.
La distance horizontale de S i est : Dh = .
Langle horizontal au sommet S entre deux points i et j est : Hz
ij
= Li Lj.
La surface horizontale dun triangle est : S
ij
= .
Il est intressant dvaluer lincertitude sur cette surface :
La surface de chaque triangle se calcule comme suit S
ij
= 0,5 . Dhi . Dhj . sin(Lj Li).
On nglige lincertitude sur la surface provenant des lectures de dniveles : une erreur
de 10 cm sur la dnivele donne un cart de moins de 5 mm sur la distance horizontale.
Lerreur sur les distances Dhi est de lordre de 10 mm (ruban de classe II).
Lerreur sur une lecture angulaire Li est de 0,5 gon soit ( 0,5 . 0,7 gon
0,011 rad) puisque chaque angle (Hz
ij
= Lj Li) ncessite deux lectures angulaires.
o|nt ,F (m) E (gon) E (mm)
Dp : distance suivant la pente (au ruban) ;
Li : lectures angulaires (lectures 0,5 gon
prs sur le cercle du niveau) ;
mi : lecture du fil niveleur sur mire.
k 0,0 112
A =3,52 =0,5 012
8 5=,28 130,0 0=21
0 =5,83 252,0 27=
D 38,70 3=3,5 319
o|nt
0
(m)
A|t|tude
(m)
,D
(m)
Ang|e 0
E
ou
sommet (gon)
SurIoce tr|ong|e
5
E
(m
)
0ot oppos
(m)
A 000 88,28 =8,:
89,: 6=,622 68,7=
8 9 88,=2 :=,27
22,0 69,82 82,08
0 - :2 8,08 =:,82
9,: 878,272 ::,89
D - :8= 80,6: 88,68
97,0 8=0,:=9 :6,8=
A 000 88,28 =8,:
Sommcs . - =00,0 = 0:8,26= 2:8,:0
Rponse
Dp
2
H
2
Dhi Dhj
2
---------------------- Hz
ij
sin
2
Topographie et topomtrie - S. Milles, J. Lagofun
LEVER DE DTAILS ET REPORT 357
Lerreur sur chaque surface est donc :
(
Sij
)
2
= (0,5 . (Dhi + Dhj) .
Dhi
. sinHz
ij
)
2
+ (0,5 . Dhi . Dhj . cosHz
ij
.
Hij
)
2
.
Donc, pour la surface totale :
S
= = 5 m
2
donc S = 4 053 5 m
2
.
Donc la prcision de cette manipulation est acceptable (surface donne 0,1 % prs)
malgr le manque de prcision angulaire de lappareil utilis (le niveau de chantier).
Remarque
G Si loprateur dispose dun thodolite, le principe est identique, la prcision tant
meilleure puisque les lectures angulaires sont effectues au moins au cgon. De plus,
il est possible de mesurer des dniveles en terrain en forte pente par nivellement
indirect.
G Si le report ultrieur est manuel, le lever par rayonnement est idal puisquil fournit
les coordonnes polaires faciles reporter sur papier au moyen dun rapporteur et
dune rgle ou dun coordinatographe polaire.
G Si le report est informatique, il vaut mieux lever les dtails en coordonnes cart-
siennes, en repre local ou gnral.
2.4 Mtho4es act0eIIes
2.4.1 Lavars avar sIaIIon IoIaIa
La station totale (ou mitraillette points ) est linstrument
idal pour le lever prcis dun grand nombre de points. La
station est quipe dun distancemtre, permet de mesurer et
denregistrer distances et angles en une seule manipulation.
Ces donnes peuvent tre enregistres sur un support infor-
matique en vue dun traitement par ordinateur. Ci-contre, le
module REC permet le transfert des donnes un ordinateur
par lintermdiaire de linterface GIF12. Il existe aussi un
carnet de terrain le GRE, et un ordinateur de terrain, le GPC1,
qui propose un certain nombre de programmes prdfinis.
lavenir, les liaisons entre diffrents appareils devraient tre
assures directement par une carte dextension externe amo-
vible de type PCCARD.
En entrant des codes pour les points de dtail levs, certains tracs peuvent tre automa-
tiss au moment de la phase dhabillage du lev sur ordinateur. Par exemple, un mme
code (numro) sera associ tous les points levs en crte de talus et un autre code ceux
levs en pied de talus. Le logiciel traitant les donnes doit tre programm pour recon-
natre ces codes et dessiner lui-mme les talus. Tous les logiciels de topographie propo-
sent des fonctions dhabillage automatique.
Sij
2
T1000 + DI1000
& module REC
Topographie et topomtrie - S. Milles, J. Lagofun
LEVER DE DTAILS ET REPORT
Lavars par F8
Le systme GPS (voir chap. 7, 1) permet aussi le lever de points
de dtails en mode cinmatique (ou Stop and Go).
La prcision centimtrique est souvent suffisante pour des levers
de dtail. Un rcepteur fixe tant plac sur un point connu, le
rcepteur mobile (fig. 8.10.) est initialis prs du rcepteur fixe
pendant cinq minutes, puis se dplace de point en point. Lopra-
teur stationne le rcepteur mobile pendant dix secondes (ou deux
poques de mesure) puis passe au point suivant.
Son avantage par rapport aux stations est de ne pas ncessiter de
point du miroir : nul besoin dintervisibilit entre point de base et
mobile, aucune limite de distance, possibilit de travailler seul, de
saffranchir du relief et possibilit de trajectographie.
Linconvnient est quil ne doit pas y avoir de rupture du faisceau
issu des satellites. Par suite, le passage sous un pont ou sous un
arbre oblige reprendre la phase dinitialisation prs du rcepteur
fixe.
Pour remdier cet inconvnient, une nouvelle mthode (OTF ou On The Fly) permet
linitialisation du rcepteur mobile en mouvement aprs une ventuelle rupture du fais-
ceau. Les points levs sont dabord calculs en coordonnes gocentriques (systme
WGS84) puis transforms en coordonnes E, N, h sur lellipsode de Clarke. Les calculs
sont actuellement trs souvent effectus en post-traitement par le logiciel fourni avec le
matriel.
Lavar da Iaadas par bIanguIaIIon
Ce type de lever peut aussi tre effectu par photogrammtrie terrestre (voir chap. 7 5.4)
Une autre technique est dutiliser un thodolite muni dun distancemtre rayon laser ;
ce dernier permet dobtenir la distance un point vis sans rflecteur, puisque la puis-
sance du laser permet de rcuprer un rayon rflchi et den dduire la distance lobjet
vis.
Un thodolite mcanique classique calcule la position de chaque point caractristique de
la faade lever par intersection partir de deux stations.
Une base A-B (fig. 8.11.) est implante face llment lever. La base doit tre la plus
longue possible et telle que chaque triangle dobservation soit le plus quilatral possible.
Chaque point caractristique est vis depuis les deux stations ; sa position dans lespace
est calcule comme suit :
Fig. 8.10. : GPS
Topographie et topomtrie - S. Milles, J. Lagofun
LEVER DE DTAILS ET REPORT
G en planimtrie par intersection (formules de Delambre, voir tome 2, chap. 4, 1) ou
en utilisant la formule des cotangentes (voir lexemple ci-aprs) ;
G en altimtrie par nivellement indirect : on calcule deux fois laltitude de chaque
point, ce qui permet un contrle de prcision.
Lensemble de la manipulation est une succession de calculs de point inaccessible (voir
chap. 3, 7.4).
Exemple
Loprateur se fixe un repre local sur la base A-B (fig. 8.11.) ; la distance AB et la
dnivele AB sont mesures prcisment Dh
AB
= 139,869 m et H
AB
= + 0,432 m.
Si un repre de nivellement est proche, il peut aussi niveler les deux points A et B pour
obtenir leur altitude. A (100 m ; 100 m ; 100 m), B (139,869 m ; 100 m ; 100,432 m)
donc G
AB
= 100 gon.
G Si loprateur utilise les formules de Delambre pour lintersection : en station en
A, loprateur affiche 100 gon sur le point B et en station en B, il affiche 300 gon
sur A. De cette manire, on travaille dans le repre local A,x,y et lon obtient
directement chaque station les gisements des vises dans ce repre local (L
Ap
= G
AP
et L
BP
= G
BP
). Si lon travaille en repre gnral, il suffit dafficher le
gisement rel de la vise sur le point vis, ce gisement tant calcul partir des
coordonnes de A et B (voir le chapitre 4 du tome 2, 1 pour les formules donnant
X
P
et Y
P
). Laltitude H
P
est donne par les formules ci-aprs.
G Sil utilise la formule suivante, dite formule des cotangentes, il suffit chaque
station de positionner le zro du limbe sur lautre point de la base ou, mieux, de
faire les lectures sur P et sur A ou B puis den faire la diffrence. On obtient alors
Fig. 8.11. : Lever par biangulation
Topographie et topomtrie - S. Milles, J. Lagofun
LEVER DE DTAILS ET REPORT
les angles Hz
AP
et Hz
BP
. Les coordonnes planimtriques du point P sont alors
donnes par les formules suivantes :
Attention ! les formules donnant X
P
et Y
P
ne sont valables que dans la configuration de
la figure 8.11., cest--dire lorsque P se trouve gauche du segment AB en regardant
de A vers B. Si P se trouve droite de AB, les termes (Y
B
+ Y
A
) et (X
A
+ X
B
) des
numrateurs deviennent respectivement (+ Y
B
Y
A
) et (+ X
A
X
B
).
Pour laltitude du point P, dans tous les cas, on mesure chaque station la hauteur des
tourillons ht
A
et ht
B
, et on lit les angles znithaux V
AP
et V
BP
. Dou laltitude de P qui
est calcule par la moyenne de deux vises de nivellement indirect (voir chap. 6) :
Dans la pratique, il est prfrable de calculer deux fois laltitude de P pour valuer
lcart entre les deux dterminations qui renseigne sur la prcision de la manipulation
et faire ensuite la moyenne des deux valeurs.
Application numrique : les coordonnes des points A et B sont donnes plus haut.
ht
A
= 1,62 m ; Hz
AP
= 50,4530 gon ; V
AP
= 84,7388 gon ; X
P
= 120,100 m ;
H
P
= 108,613 m.
ht
B
= 1,69 m ; Hz
BP
= 50,9808 gon ; V
BP
= 85,7124 gon ; Y
P
= 120,388 m ;
H
P
= 108,605 m.
En utilisant une station totale permettant de mmoriser sur support informatique les
lectures H
AP
,, H
BP
, V
AP
et V
BP
, il est possible de mettre au point un traitement informa-
tique (sur tableur ou programme) qui calcule ces coordonnes automatiquement
puisque cest un calcul long et rptitif.
Le tableau PTINAC.XLS du cdrom permet deffectuer ces calculs.
Le programme PTINAC.BAS du cdrom permet de calculer un nombre prati-
quement illimit de points inaccessibles. Une rsolution graphique sur
AutoCAD est prsente au chapitre 3, paragraphe 7.4
X
P
X
A
cotan X
B
cotanHz
AP
Y
B
Y
A
+ +
cotanHz
BP
cotanHz
AP
+
----------------------------------------------------------------------------------------- =
Y
P
Y
A
cotanHz
BP
Y
B
cotanHz
AP
X
A
X
B
+ +
cotanHz
BP
cotanHz
AP
+
----------------------------------------------------------------------------------------------------- =
H
p
1
2
--- H
A
ht
A
H
B
ht
B
X
p
X
A
( )
2
Y
p
Y
A
( )
2
+
V
AP
tan
---------------------------------------------------------
X
p
X
B
( )
2
Y
p
Y
B
( )
2
+
V
BP
tan
--------------------------------------------------------- + + + + + =
Topographie et topomtrie - S. Milles, J. Lagofun
LEVER DE DTAILS ET REPORT
Lavar an sIaIIon IIbra
La station libre est une mise en station de lappareil effectuant le lever sur un point
quelconque qui nest pas obligatoirement matrialis au sol. Cette mthode permet de
saffranchir des obstacles existants en choisissant une station do lensemble (ou la plus
grande partie possible) de la zone lever est visible.
Il faut toutefois dterminer les coordonnes du point de station dans le repre dans lequel
on dsire obtenir le lever. Les solutions suivantes sont envisageables :
G si quatre points anciens connus sont visibles depuis la station, cette dernire est
calcule par relvement en mesurant les angles sur les points dappui (voir tome 2,
chap. 1, 6). La dtermination est prcise et faite avec contrle ;
G si trois points anciens connus sont visibles depuis la station, elle est calcule par
multilatration ou par insertion en mesurant les distances et/ou les angles sur les
points dappui (voir tome 2, chap. 1, 9). La dtermination est galement prcise et
faite avec contrle ;
G si seulement deux points dappuis sont connus, il faut mesurer les distances de la
station chaque point ainsi que langle sous lequel ils sont vus depuis la station : cela
revient un calcul dinsertion avec un nombre minimal de donnes (voir tome 2,
chap. 1, 9.4) ;
G si un systme GPS est utilis (voir chap. 7), il suffit dun seul point ancien connu :
on stationne une antenne sur le point dappui et on dispose une autre antenne sur
lappareil qui effectue le lever. La mesure prcise des coordonnes de la station (qui
peut demander jusqu une heure) seffectue ainsi en temps masqu pendant que le
lever de dtails est effectu.
Lavar aIIImIrIqua
On distingue deux finalits au lever altimtrique dcrites ci-aprs :
Le lever Je alals lsals
Ces points sont seulement destins tre cots en altitude sur le plan de manire donner
un minimum dinformations daltimtrie. Ils seront levs par des procds classiques,
soit par nivellement direct au niveau, soit par nivellement indirect au thodolite.
Les points inaccessibles font partie de ces points isols (voir lexemple de dtermination
dun point inaccessible au chapitre 3, paragraphe 7.4).
Une autre dtermination de points inaccessibles est possible : les points A, B et P
(fig.8.12.) sont aligns (B est align au thodolite sur AP lors de la premire station en
A). Le droulement des calculs est le suivant :
1 - On cherche dterminer la hauteur h de lantenne.
Rsolution : h = L [tan(100 V
AP
) + tan(V
AR
100)] = l . [tan(100 V
BP
) + tan(V
BR
100)]
Topographie et topomtrie - S. Milles, J. Lagofun
LEVER DE DTAILS ET REPORT
On remarque que : tan(100 ) = cotan et que : tan( 100) = cotan
Comme D = L l, on en dduit que :
D = 59,415 m, V
AP
= 74,3270 gon, V
AR
= 99,8538 gon, V
BP
= 58,5119 gon,
V
BR
= 104,3114 gon. On trouve : h = 51,544 m sans contrle.
2 - On cherche dterminer laltitude de P.
Laltitude de A est connue et celle de B est dduite de celle de A ; on calcule alors une
simple intersection entre les vises issues de A vers P et de B vers P dans le repre (A, x,
y) de la figure 8.12. (formules de Delambre, voir tome 2, chap. 4, 1.2).
H
A
= 141,034 m , H
B
= 145,522 m . On trouve H
P
= 192,857 m sans contrle.
Ces mthodes sont intressantes en cas de manque de place afin de dfinir le triangle de
la mthode classique.
Lever ea vue Je la Jllalllaa Jua maJle aumrlque Je lerrala
La finalit est dobtenir un semis de points connus en X, Y et Z de manire, par exemple,
pouvoir tracer des courbes de niveau (voir chap. 10, 1). Le lever est gnralement
effectu sur une station avec enregistrement automatique pour sa facilit demploi et sa
productivit.
h
D cotanV
AP
cotanV
AR
[ ] cotanV
BP
cotanV
BR
[ ]
cotanV
BP
cotanV
BR
cotanV
AP
cotanV
AR
+
---------------------------------------------------------------------------------------------------------------------- =
Fig. 8.12. : Point inaccessible
Application
Application
Topographie et topomtrie - S. Milles, J. Lagofun
PROFILS, CUBATURES 479
10
PROFILS,
CUBATURES
Ce chapitre est consacr la modlisation et la reprsentation dun terrain en trois
dimensions ; en effet, sur une carte, sur un plan, laltimtrie est une donne essentielle.
1 000888 0 8Ik0
1.1 0fIaItIoas
Les courbes de niveau, appeles isophyses, sont destines donner sur une carte un
aperu du relief rel. Une courbe de niveau (fig. 10.1.) est lintersection du relief rel avec
un plan horizontal daltitude donne en cote ronde (gnralement un nombre entier).
Les courbes sont quidistantes en altitude ; leur espacement horizontal dpend de la
dclivit du terrain reprsenter et de lchelle du plan ou de la carte. Sur une carte IGN
au 1/100 000, les plans horizontaux sont distants de 20 m en altitude et les courbes
principales y sont repres tous les 100 m. Les courbes matresses sont en trait continu
pais et places toutes les cinq courbes ; les courbes ordinaires sont en trait continu
moyen, les courbes intercalaires en trait interrompu fin.
On visualise en trois dimensions le terrain dessin plat sur la carte. Cela est renforc
sur les cartes par des coloriages pour souligner les lignes de crte : ils reprsentent
lombre cre par une lumire fictive qui viendrait du nord-ouest de la carte. Sur
lexemple ci-aprs, on peut lire sur la vue en plan les pentes du terrain naturel ; on repre
les sommets, les cols topographiques, les cuvettes (ou dolines), les ruptures de pente.
On distingue les zones en forte dclivit, o les courbes de niveau sont trs proches, des
zones de moindre dclivit, o les courbes sont plus espaces.
Plusieurs courbes qui fusionnent en une seule indiquent une falaise verticale (fig. 10.1.).
Topographie et topomtrie - S. Milles, J. Lagofun
480 PROFILS, CUBATURES
Une courbe de niveau est une courbe ferme qui ne peut croiser une autre courbe de
niveau daltitude diffrente, sauf dans une caverne, auquel cas il y a deux croisements
(voir fig. 10.1.).
Fig. 10.1. : Terminologie
Topographie et topomtrie - S. Milles, J. Lagofun
PROFILS, CUBATURES 481
Pour renforcer la lisibilit dun plan, sont ajoutes :
G les lignes de crte en rouge qui joignent les sommets et les cols ; elles figurent les
lignes de partage des eaux qui sparent deux bassins-versants contigus dont les eaux
scoulent vers deux talweg diffrents. En zone peu accidente, on parle de ligne de
fate ;
G les lignes de talweg (en allemand chemin de fond de valle) en bleu rejoignent les
points les plus bas dune valle et figurent les lignes dcoulement des eaux. La
ramification de ces lignes se fait de laval vers lamont et donne sur le plan une figure
nomme le chevelu (voir chap. 8, 2.4.6.2).
Les lignes de crte et de talweg sont perpendiculaires aux courbes de niveau.
Les courbes de niveau des cartes petite chelle ne sont pas leves directement sur le
terrain : ce serait fastidieux. Elles sont traces par restitution photogrammtrique (voir
chap. 7, 5).
Dans un lever de dtails, les courbes de niveau sont toujours une information supplmen-
taire importante ; elles sont donc souvent traces. Elles sont gnralement leves avec
des stations totales par la cration de semis de points, puis traces automatiquement sur
informatique.
1.2 FrIacIe 4e I'IateroIatIoa
Comprendre l'interpolation permet de
choisir judicieusement le nombre et la
position des points lever.
Laltitude au point M situ entre les
courbes de niveau 530 et 540 est dter-
mine en considrant le terrain en pente
constante entre A et B. Les points A et
B sont les points les plus proches de M
sur les courbes de niveau 530 et 540 ; ici
H = 10 m. La pente au point M vaut :
p = .
La distance ab est la distance relle,
cest--dire la distance mesure sur le
plan et divise par lchelle du plan.
Laltitude de M est :
.
On peut appliquer cette dernire formule avec les distances mesures sur le plan ; le
facteur dchelle se simplifie.
Fig. 10.2. : Interpolation de courbes de niveau
H
ab
------- -
H
M
H
A
= am
H
ab
-------- +
Topographie et topomtrie - S. Milles, J. Lagofun
PROFILS, CUBATURES
Les courbes de niveau de la figure 10.6. sont obtenues par une modlisation base de
triangles qui correspond au mode de trac manuel par interpolation. Les courbes
brutes, qui sont des assemblages de segments, sont ensuite lisses de manire obtenir
une reprsentation plus conventionnelle.
Les distances horizontales sont mesures sur le plan : cela donne les profils de la figure
10.7. (voir au paragraphe 2 la reprsentation complte et normalise des profils en long
et en travers).
Fig. 10.6. : Implantation dun projet routier
Rponse
Fig. 10.7. : Profil en long et exemple de profil en travers
Topographie et topomtrie - S. Milles, J. Lagofun
PROFILS, CUBATURES 489
2 F80FIl8 8 l086 I 8 I8k88
2.1 0fIaItIoas
Un profil en long est la reprsentation dune coupe verticale suivant laxe dun projet
linaire (route, voie ferre, canalisation, etc.). Le profil en long est complt par des
profils en travers qui sont des coupes verticales perpendiculaires laxe du projet. Leur
tablissement permet en gnral le calcul des mouvements de terres (cubatures) et, par
exemple, permet de dfinir le trac idal dun projet de manire rendre gaux les
volumes de terres excavs avec les volumes de terre remblays. Linformatique joue ici
aussi un rle dterminant puisque ces calculs sont rptitifs. En effet, il faut plusieurs
essais lors dune recherche de trac avant darriver au trac dfinitif.
Par exemple, sur la figure 10.10., un projet routier est figur en trait daxe. Le profil en
long constitue un dveloppement suivant son axe sur lequel sont reprsents le terrain
naturel et le projet. Les profils en travers, rgulirement espacs, sont une vue en coupe
qui fournit linscription de la route dans le relief perpendiculairement laxe.
Fig. 10.10. : Profils en long et en travers
Topographie et topomtrie - S. Milles, J. Lagofun
490 PROFILS, CUBATURES
2.2 le rofII ea Ioa
Le profil en long est un graphique (fig. 10.11.) sur lequel sont reports tous les points
du terrain naturel et de laxe du projet. Il est tabli en premier lieu. On sappuie sur ce
document pour le dessin des profils en travers (fig. 10.12.). Ce graphique soriente de la
gauche vers la droite ; les textes se rapportant au projet sont en rouge, criture droite et
ceux qui se rapportent au terrain naturel en noir et en italique (si lon travaille exclusive-
ment sur un support en couleur, on peut ne pas utiliser la reprsentation en italique).
Distances et altitudes sont donnes en mtres au centimtre prs.
On choisit en gnral un plan de comparaison daltitude infrieure laltitude du point
le plus bas du projet ou du terrain naturel. Ce plan de comparaison est laxe des abscisses
du graphique sur lequel sont reportes les distances horizontales suivant laxe du projet.
Sur laxe des ordonnes, sont reportes les altitudes.
Les chelles de reprsentation peuvent tre diffrentes en abscisse et en ordonnes (en
rapport de lordre de 1/5 1/10) de manire souligner le relief qui peut ne pas apparatre
sur un projet de grande longueur.
On dessine tout dabord le terrain naturel (TN), gnralement en trait moyen noir. Son
trac est donn par la position de chaque point daxe dun profil en travers, le terrain
naturel tant suppos rectiligne entre ces points. On reporte en mme temps dans le
cartouche des renseignements en bas du graphique : les distances horizontales entre
profils en travers dites distances partielles, les distances cumules (appeles aussi abs-
cisses curvilignes) depuis lorigine du projet et laltitude de chaque point.
On positionne ensuite le projet (trait fort rouge) en tenant compte de tous les impratifs
de visibilit : pente maximale (voir chap. 9, 6), galit des dblais et des remblais, etc.
Ce trac donne des points caractristiques comme les points de tangence entre droites et
parties courbes, les points hauts (ou sommets situs la fin dune rampe et au dbut de
la pente suivante), les points bas (situs la fin dune pente et au dbut de la rampe
suivante). Une rampe est une dclivit parcourue en montant dans le sens du profil ; une
pente est parcourue en descendant. Un parcours horizontal est aussi appel palier. Les
dclivits des parties droites, les longueurs projetes des alignements droits et des
courbes ainsi que les rayons de courbure sont reports en bas du cartouche ; on reporte
galement les longueurs dveloppes des courbes.
Les cotes des points caractristiques du projet sont reportes dans les lignes de rensei-
gnement en bas du graphique : distance lorigine du projet (distance cumule) et
altitude. Dans la phase davant-projet sommaire, elles sont mesures sur le graphique du
profil en long. Elles sont calcules exactement en phase de projet dexcution, partir du
profil en long et des profils en travers rels, levs sur le terrain. La manire la plus
efficace de faire ce calcul est de construire le profil sur un logiciel de DAO et dy lire les
coordonnes des intersections (voir lexemple du paragraphe 2.4).
Topographie et topomtrie - S. Milles, J. Lagofun
PROFILS, CUBATURES 491
Les calculs des positions des points caractristiques se ramnent des intersections
droites-droites, droites-cercles ou droites-paraboles dans le repre associ au profil en
long.
On peut colorier de manire diffrente les remblais (en rouge) et les dblais (en bleu).
Les profils en travers fictifs (surface nulle) dont on doit dterminer la position (abscisse
et ventuellement laltitude) sont les points dintersection entre le terrain naturel et laxe
du projet ; ces profils particuliers sont utiles pour le calcul des cubatures. Il faut connatre
leur position en abscisse par rapport aux deux profils en travers qui les encadrent.
Remarque
Veillez ne pas confondre le systme de coordonnes dans lequel sont reprs le profil
en long et le profil en travers (x, y associ au graphique, laxe des y reprsentant les
altitudes) avec le repre gnral (ou local) dans lequel les points du terrain sont
exprims pour les implantations (altitudes cotes sur laxe des Z).
Attention au fait que lon utilise des chelles diffrentes en abscisse et en ordonne.
Les pentes sur le graphique sont multiplies par un facteur dchelle qui est le rapport
de lchelle des ordonnes sur celle des abscisses. Les courbes sont aussi transformes
mais de manire non homothtique (puisque seule lchelle en ordonne varie) : un
cercle devient donc une ellipse et les rayons de courbure sur le graphique nont plus
Fig. 10.11. : Profil en long
Topographie et topomtrie - S. Milles, J. Lagofun
492 PROFILS, CUBATURES
rien voir avec la ralit... Cette erreur peut facilement tre vite par une construction
graphique avec un logiciel de DAO : la construction est faite lchelle 1 en abscisse
et en ordonne (on en dduit les cotes relles) et, ensuite, pour les besoins de la
reprsentation, on peut multiplier lchelle des ordonnes par 5 ou 10. (voir lexemple
trait au paragraphe 2.4).
2.3 le rofII ea travers
Les profils en travers (sections transversales perpendiculaires laxe du projet) permet-
tent de calculer les paramtres suivants :
G la position des points thoriques dentre en terre des terrassements ;
G lassiette du projet et son emprise sur le terrain naturel ;
G les cubatures (volumes de dblais et de remblais).
Le profil en travers (fig. 10.12.) est reprsent en vue de face pour une personne qui se
dplacerait sur laxe du projet de lorigine lextrmit du projet. La voie de gauche doit
donc se situer sur la partie gauche du profil.
On commence par dessiner le terrain naturel partir dun plan horizontal de rfrence
qui nest pas forcment celui du profil en long, de manire obtenir le profil en travers
lchelle maximale sur le format choisi. Lchelle de reprsentation est de lordre de
1/100 1/200 (jusqu 1/50 pour les voies les moins larges). Il ny a pas dchelle
diffrente en abscisse et en ordonne de manire pouvoir mesurer directement sur le
graphique des longueurs dans toutes les directions ou bien des surfaces (mesure sur
papier au planimtre ou sur informatique, par exemple laide de la commande AIRE
dAutoCAD). Labscisse de chaque point du terrain naturel (ou du projet) est repre par
rapport laxe du profil en travers (donc ngative gauche et positive droite),
lordonne est toujours laltitude du point. Cette reprsentation logique introduit un
repre (x, y, z) non direct (fig. 10.10.).
On y superpose ensuite le gabarit type du projet (largeur de chausse, accotements, fosss
et pentes de talus) partir du point daxe dont laltitude a t dtermine sur le profil en
long. Sur informatique, ce gabarit est un dessin type (sous forme de bloc) mis en place
chaque profil. En dessin manuel, on utilise un fond de plan.
Cela permet de calculer la position des points dentre en terre (voir chap. 9, 7).
Les conventions de couleur et dcriture doivent tre les mmes que pour le profil en
long.
Les fosss ne sont pas reprs comme les autres points caractristiques puisque, de
manire simplifier le calcul, ils ninterviennent pas dans la dcomposition de la surface
en triangles et trapzes. Ils sont calculs sparment.
Topographie et topomtrie - S. Milles, J. Lagofun
PROFILS, CUBATURES 493
Une flche verticale dans laxe du foss indique si leau scoule vers le profil suivant
(flche vers le bas) ou vers le profil prcdent (flche vers le haut) dans le sens du profil
en long.
On porte sur chaque profil la surface de remblais et de dblais (voir 2.5).
Le numro du profil et sa position (P.K. ou point kilomtrique) dans le projet doivent
figurer sur le graphique.
Les surfaces en dblai et en remblai sont calcules et portes sur le graphique ainsi que
la distance dapplication du profil (voir 2.5).
On indique aussi labscisse curviligne laxe du projet (distance suivant laxe depuis
lorigine du projet).
Les calculs ncessaires la dtermination des points dentre en terre, sils sont effectus
manuellement, peuvent tre obtenus par lintersection de droites dans le plan du gra-
phique. De mme, les surfaces peuvent tre calcules manuellement en utilisant les
coordonnes (x et z) des sommets ou au moyen dun planimtre. Le moyen le plus
efficace reste le dessin chelle relle sur ordinateur et la lecture directe des coordonnes
et surfaces (voir exercice du paragraphe 2.4).
Il existe trois types de profils en travers (fig. 10.13.) : les profils en remblai, en dblai ou
bien les profils mixtes.
Fig. 10.12. : Profil en travers
Topographie et topomtrie - S. Milles, J. Lagofun
494 PROFILS, CUBATURES
Notons que la prsence du foss sur ces diffrents types de profils nest ncessaire quen
cas dimpossibilit dcoulement naturel des eaux. Par exemple, comparez le profil en
remblai et le profil mixte.
2.4 kIIcatIoa
La construction graphique sur ordinateur laide dun logiciel de DAO facilite le travail
du projeteur puisque les calculs sont effectus simultanment au dessin : il suffit de
relever les positions des points dans un repre associ au profil. De plus, les lments
rptitifs tels les symboles, les cartouches, le profil type de la chausse peuvent tre mis
en mmoire sous forme de bloc et rappels si besoin.
nonc : partir des donnes du tableau suivant, dterminez le profil en long qui
minimisera les cubatures et les mouvements de terre en essayant dquilibrer les volumes
de remblai et de dblai, sachant que la dclivit ne doit pas dpasser 4 %, que tout
raccordement dans le sens du profil en long est ralis par un arc de cercle dun rayon
dau moins 2 500 m et que la route est horizontale au dpart et la fin de la portion de
projet tudie. La largeur de la chausse est de 10 m, le dvers du revtement est de 2 %
de part et dautre de laxe de la chausse, la pente des talus de 2/1 (voir chap. 9, 6.1.1),
les fosss ont une largeur de 20 cm en fond pour une profondeur de 30 cm.
roI||s ,D (m) -10.00 m -5.00 m 0.00 m 5.00 m 10.00 m
1 '# # & %$ "#
2 # %" "# '%"
3 ! &! %'# %%& %" $$'
4 #' $# #! "'& "! !%&
5 #%% "!% !%# !" !
## "'$ "# " !%& !$"
7 !' $&" $%% $$% $#" $!!
8 !## '&% '%' '%# '%$ '&"
9 " # !% #&
10 "# '&% !" $ '" "%
Fig. 10.13. : Diffrents types de profil
Topographie et topomtrie - S. Milles, J. Lagofun
PROFILS, CUBATURES 495
Le tableau prcdent donne les altitudes releves chaque profil en travers : laxe,
colonne 0,00 m, 5,00 m et 10,00 m gauche de laxe et 5,00 m et 10,00 m droite
de laxe. Dh reprsente la distance horizontale cumule chaque profil depuis lorigine.
salullaa graklque lalJe JAula6A LT
Commencez par la cration des calques utiles au dessin : un calque PROJET en
rouge, un calque TN en vert. Rglez lunit de sortie sur papier pour que lon
puisse dessiner directement en mtres : case de dialogue IMPRIMER du menu
FICHIER, dans lencadr chelles, entrez les valeurs suivantes :
1000 mm tracs = 1 unit dessin (1 000 mm dans la ralit = 1 unit cran).
2.4.1 FrparaIIon du dassIn
Crez un style de texte PROJET dont le texte sera en italique et la hauteur des caractres
de 2,5 mm sur papier. Commande STYLE nom du style PROJET police
ROMANS.SHX hauteur 0.0025 angle dinclinaison 15 (degrs) ; pour toutes les
autres questions, rpondez par qui valide les valeurs par dfaut.
Crez de mme un style TN qui servira tous les textes relatifs au terrain naturel :
commande STYLE nom du style TN police ROMANS.SHX hauteur 0.0025 angle
dinclinaison 0. Ceci permettra de dessiner les lments de mise en page (textes et
cartouches) en mtres ; par exemple, un format A4 aura pour dimensions 0,21 m par
0,297 m. Nous utiliserons ensuite les possibilits de lespace papier pour rgler lchelle
de sortie des profils.
Remarque
Lespace papier dAutoCAD, dans lequel on bascule en cochant loption ESPACE
PAPIER du menu VUE, permet de faire de la mise en page ; on peut y juxtaposer
plusieurs fentres qui sont autant de vues diffrentes des objets dessins dans lespace
objet. On peut ainsi reprsenter un seul et mme objet vu de plusieurs perspectives
diffrentes. Cest la facilit de la mise lchelle grce la commande Zoom option
XP spcialement conue pour prparer la sortie sur papier.
2.4.2 assIn du proIII an Iong du IarraIn naIuraI
Dans le calque TN, dessinez en polyligne le profil du terrain naturel : POLYLIGNE du
point 0,110.82 au point 50.1,110.21 au point 100.3,107.78 etc. au point 450,110.6
Dessinez le plan de comparaison, par exemple 102 m, et la position des profils en
travers : LIGNE du point 0,102 au point 450,102 puis LIGNE de lEXTrmit de
chaque tronon de la polyligne PERpendiculaire la droite figurant le plan de compa-
raison.
Topographie et topomtrie - S. Milles, J. Lagofun
PROFILS, CUBATURES 507
Le calcul informatique est dautant plus indiqu dans ce cas quil conduit encore plus
rapidement au rsultat, condition davoir une discrtisation du terrain naturel sous
forme de semis de points ou de maillage rgulier.
Il faut noter que la formule prcdente est aussi valable pour une surface de base en forme
de paralllogramme.
2.5.2.2 Flale-larme avec calcul Jes lalus
En fait, dans le cas gnral, il faut tenir compte des pentes de talus de remblai et de dblai
qui engendrent des volumes non ngligeables, surtout si le terrain est trs accident ou
en forte pente. Il faut donc dterminer les volumes des terres provenant des talus (comme
pour un projet linaire) et calculer les points dentre en terre. Les logiciels de calcul
topographiques et certains logiciels adapts aux projets de travaux publics permettent
dautomatiser ces calculs (voir sur la figure 10.30. le rsultat du calcul de lexemple ci-
aprs obtenu avec le logiciel ADTOPO). Le logiciel Micro-Piste, du SETRA, ou le
logiciel MOSS permettent deffectuer des calculs similaires.
Pour comprendre le principe du calcul, nous allons voir avec un exemple comment on
peut construire graphiquement les points dentre en terre des talus sur une pure (fig.
10.27.). Le principe est comparable celui du paragraphe 2.3, ceci prs que loprateur
construit les profils en travers dans les deux directions du maillage : en effet, il ny a pas
de direction privilgie comme dans un projet linaire.
xllcallaa arllr Jua exemle
Les donnes du projet sont les coordonnes locales et altitudes des sommets du maillage
du terrain naturel. Elles sont donnes dans le tableau suivant.
N N (m) O (m) (m) N N (m) O (m) (m) N N (m) O (m) (m)
0 9,== 152,=1 152,30 72 120,1 121,77 1=1,00 84 150, 77,99 121,10
1 120,1 152,=1 1=2,=0 73 9,== 121,77 1=9,70 85 137,11 77,99 128,90
2 137,11 152,=1 13=,00 74 20=,88 99,88 111,=0 8 120,1 77,99 138,00
3 150, 152,=1 127,30 75 181,1 99,88 11=,0 87 9,== 77,99 1=,80
4 1=,22 152,=1 122,90 7 1=,22 99,88 118,00 88 20=,88 =7,35 10=,0
5 181,1 152,=1 119,70 77 150, 99,88 123,00 89 181,1 =7,35 108,90
20=,88 152,=1 11,70 78 137,11 99,88 130,90 90 1=,22 =7,35 112,70
7 20=,88 121,77 113,=0 79 120,1 99,88 139,90 91 150, =7,35 117,50
8 181,1 121,77 11,0 80 9,== 99,88 1=8,30 92 137,11 =7,35 12=,90
9 1=,22 121,77 119,80 81 20=,88 77,99 109,00 93 120,1 =7,35 13=,10
70 150, 121,77 12=,0 82 181,1 77,99 112,50 94 9,== =7,35 1==,30
71 137,11 121,77 132,10 83 1=,22 77,99 11,10
Topographie et topomtrie - S. Milles, J. Lagofun
508 PROFILS, CUBATURES
La plate-forme installer est de base rectangulaire et doit se situer laltitude 118 m. Ses
dimensions sont de 50 m 25 m et les coordonnes du point infrieur gauche sont
(141,54 ; 87,66). Les pentes des talus de remblai et de dblai sont de 1/1.
La figure 10.27. reprsente lpure de construction des lignes dentre en terre : ce sont
les droites dintersection entre les plans inclins du talus et le terrain naturel. En parallle
avec la vue en plan, on construit deux vues en lvation du terrain naturel et de la plate-
forme, soit une vue pour chaque direction du maillage. Pour exagrer le relief du terrain
naturel, les chelles peuvent tre diffrentes en abscisse et en ordonne sur chaque
graphique en lvation.
Attention : si les chelles en abscisse et en ordonne sont diffrentes, veillez multiplier
les pentes de talus par le mme facteur dchelle (rapport de lchelle en z par lchelle
en x) de manire conserver la pente relle des talus par rapport au terrain naturel.
On reporte ensuite sur la vue en plan les points dintersection du terrain naturel avec les
talus de la plate-forme : cela donne les points dentre en terre et la ligne de sparation
entre remblai et dblai.
Fig. 10.27. : pure des entres en terre dune plate-forme
Topographie et topomtrie - S. Milles, J. Lagofun
PROFILS, CUBATURES 509
Ces constructions peuvent tre effectues sur DAO : on y travaille directement
en trois dimensions.
Sur la figure 10.27., toutes les lignes
dentre en terre sont construites. En
fait, certaines sont inutiles puisquelles
vont trop loin dans le terrain naturel
dans les angles de la plate-forme (voir
figure 10.28. les lignes dentre en
terre dfinitives traces en considrant
que les angles sont dfinis par des
plans inclins selon la mme pente que
les autres faces des talus). En pratique,
les angles ne sont pas rellement
taills : ils sont une jonction entre les
talus des cts de la plate-forme. Pour
le calcul thorique, si lon veut con-
server la pente des talus dans ces
zones, on peut construire ces angles
comme sur la figure 10.28. On obtient
alors dans les angles des volumes de
terre qui sont des pyramides dont deux faces sont verticales, une face incline suivant la
pente de talutage, ici 1/1, et une face suprieure appartenant au terrain naturel, par
exemple le volume dont la projection horizontale donne les points 1, 5 et 6.
On peut alors relever sur le graphique la position des points dentre en terre en planim-
trie pour une implantation ultrieure. Leur altitude est calcule par interpolation soit
partir des courbes de niveau, soit directement partir des sommets du maillage.
sullals
Le tableau suivant donne les coordonnes des points dentre en terre de la plate-forme.
N N (m) O (m) (m) N N (m) O (m) (m) N N (m) O (m) (m)
1 =,:= 2,66 28,70 12 9:,78 2,66 =,60 23 =,:= 99,88 28,=0
2 9,:= 2,66 =,=0 13 97,09 99,88 2,:0 24 :0,66 99,88 28,00
3 =,:= 87,66 27,20 14 98,60 87,66 ,20 25 6=,22 99,88 8,00
4 9,:= 87,66 2,80 15 9,:= 80,9 ,=0 2 8,6 99,88 =,60
5 8,88 2,66 =,2 1 8,6 82,60 2,90 27 9,:= 99,88 8,20
=,:= 2=,=7 29,80 17 6=,22 86,:0 6,80 28 :0,66 2,66 2=,90
7 :0,66 9,06 2=,70 18 6, 87,66 8,00 29 6=,22 2,66 9,00
8 6=,22 8,8 20,00 19 :0,66 8=,08 2,60 30 8,6 2,66 :,80
9 69,:8 82,66 8,00 20 =,:= 79,28 26,=0 31 :0,66 87,66 2,90
10 8,6 =,7 6,00 21 2,:7 87,66 88,00 32 6=,22 87,66 8,00
11 9,:= :,99 =,70 22 9,8: 99,88 89,0 33 8,6 87,66 8,=0
Fig. 10.28. : Entres en terre et talus
Topographie et topomtrie - S. Milles, J. Lagofun
510 PROFILS, CUBATURES
6alcul Jes cuhalures Je celle lale-larme
Il y a deux possibilits pour calculer ce volume.
1 - Calcul exact , en dcomposant le volume en volumes lmentaires partir des
coordonnes x, y et z de chaque point dentre en terre ainsi que des points du terrain
naturel situs la verticale de la plate-forme (points 1, 2, 3, 4 et 23 33 sur la figure
10.28.), les sommets du maillage tant dj connus. On affecte dun signe prime ( ) les
points projets sur la plate-forme, par exemple (1 ) la verticale de (1).
Par exemple (fig. 10.28.), le volume qui se projette sur la plate-forme en 23, 24, 3 et 31
est constitu de deux prismes et se calcule comme indiqu au paragraphe 2.5.2.1 :
V
3-23-24-31
= 12,22 . 9,12 . (9,2 + 10,4 + 5 + 3,9) / 4 = 794,1 m
3
.
Le volume qui se projette sur le terrain naturel en 1, 5, 22 et 23 est dlimit par deux
triangles verticaux dont on peut calculer la surface ainsi :
G triangle 1-1-5 : surface 124,2 m
2
G triangle 23-23-22 : surface 115,4 m
2
Le volume approch est : V
1-5-22-23
= 12,78 . (124.2 + 115,4) /2 = 1 531 m
3
.
Le volume qui se projette sur le terrain naturel en 1, 5 et 6 est une pyramide base
triangulaire (triangle 1-1-6 de surface 63,2 m
2
) et de hauteur 23,21 m. Son volume se
calcule ainsi :
V
1-6-5
= 63,2 . 23,2 / 3 = 488,7 m
3
.
Et ainsi de suite. Le volume complet peut tre calcul en utilisant les trois types de calcul
prcdents. Vrifiez la prcision obtenue tant inutile tant donne la modlisation
approche du terrain que les volumes totaux sont : V
dblai
7 045 m
3
, V
remblai
2 430 m
3
.
2 - Calcul en dcoupant le
volume cherch en tranches
horizontales. Cest le mode de
calcul de certains logiciels, par
exemple ADTOPO : cest le plus
simple et le plus rapide dans le
cadre dun travail manuel. Sur la
mme pure (fig. 10.27.), cons-
truisez les lignes dintersection
entre des plans horizontaux
rgulirement espacs et les
talus. Cela revient ajouter des
lignes de niveau sur le terrain
naturel aprs excavation des
terres.
Fig. 10.29. : Calcul de cubatures
Topographie et topomtrie - S. Milles, J. Lagofun
PROFILS, CUBATURES 511
Lespacement entre ces tranches dpend de la prcision dsire. Par exemple, sur la
figure 10.29., les tranches sont espaces de 5 m, ce qui correspond aux courbes de niveau
du terrain naturel dont on dispose dj puisquelles ont t traces partir du maillage.
On calcule ensuite la surface dlimite par ces courbes de niveau ; on peut la mesurer
directement sur lpure avec un planimtre sur papier ou avec la commande AIRE
dAutoCAD. En appliquant la formule de la moyenne des aires vue au paragraphe
2.5.1.1, on en dduit le volume total.
Par exemple, calculons le volume de dblais compris entre les deux surfaces suivantes :
G surface de niveau 118 m : 6-7-8-10-9-6 (portion de la plate-forme), S = 585 m
2
G surface de niveau 123 m : 1-2-3-4-5-11-1, S = 533 m
2
Remarquez que, sur la ligne 5-11, on suit la courbe de niveau du terrain naturel.
Le volume compris entre ces deux surfaces parallles distantes de 5 m est :
V = 5.(533 + 585) / 2.
Le calcul complet demande beaucoup de temps pour arriver ce rsultat sans erreur. Le
calcul informatique est donc trs indiqu. Le tableau suivant rsume les rsultats.
Ci-aprs (fig. 10.30.) est donn le rsultat du mme calcul effectu en quelques minutes
sur ADTOPO. Le rsultat fournit par le logiciel est le suivant :
volume de dblais.. 6 860 m
3
,
volume de remblais 2 104 m
3
.
On constate sur la vue en trois dimensions (fig. 10.30.) que la modlisation des talus dans
les angles est lgrement diffrente de celle choisie dans la rsolution manuelle.
Lerreur commise par rapport au calcul exact est de lordre de 3 % en dblai ce qui
est dautant plus acceptable que le terrain naturel choisi est trs dfavorable puisquen
Db|o|s kemb|o|s
(m) 5 (m
) D (m) 8 (m
!
) (m) 5 (m
) D (m) 8 (m
!
)
118 :8: 118 66=
5 2 79: 5 9=8
123 :88 113 8
5 2 9: 1.8 02
128 8=: 111,20 0
5 808
133 76
5 :08
138 2:
2.3 29
1=0,30 0
6 82: 2 0=:
Topographie et topomtrie - S. Milles, J. Lagofun
512 PROFILS, CUBATURES
forte pente. En remblai, lcart est de 13 % ce qui peut sexpliquer par le fait que la partie
en remblai est insuffisamment discrtise : il ny a pas assez de courbes de niveau, le
calcul est donc moins prcis.
Attention ! les rsultats fournis
par ADTOPO peuvent tre trs
diffrents suivant la modlisa-
tion choisie et le type de terrain
naturel. Il convient donc de vri-
fier les rsultats par plusieurs
calculs faisant intervenir des
modlisations diffrentes du ter-
rain naturel. On peut aussi jouer
sur des paramtres tels que
llancement des facettes du ter-
rain ou la densit du dcoupage
pour le calcul des volumes de
dblai et remblai.
2.5.3 roupaga suIvanI Ias rourbas da nIvaau
La mthode de calcul aborde dans lexercice prcdent sapplique aussi directement aux
courbes de niveau pour valuer par exemple la capacit dun rservoir naturel
(fig. 10.31.).
On suppose toujours que le terrain est linaire entre deux courbes de niveau. Les surfaces
dlimites par ces courbes tant horizontales et donc parallles entre elles, on peut
appliquer la formule des trois niveaux (Simpson, voir tome 2, chap. 5, 7.1) pour obtenir
le volume compris entre trois courbes conscutives. Si le terrain est en pente rgulire,
on lapplique dans sa forme simplifie, cest--dire que le volume est gal la moyenne
des surfaces qui le dlimitent multipli par la distance entre ces surfaces (cest le cas du
tableau de calcul suivant). La courbe de niveau 365 m a t ajoute par interpolation
partir des courbes 360 m et 370 m pour tenir compte de lirrgularit du terrain naturel
entre ces deux courbes de niveau.
Calculer le volume de la retenue deau cre par le barrage de la figure 10.31. si lon
admet que leau ne doit pas dpasser la cote 400 m. Le fond de valle est estim
laltitude 324 m.
Fig. 10.30. : Implantation de la plate-forme en 3D
Application
Topographie et topomtrie - S. Milles, J. Lagofun
PROFILS, CUBATURES 513
Le tableau suivant dtaille les calculs de volume.
(m) 5 (m
) D (m) 8 (m
!
) (m) 5 (m
) D (m) 8 (m
!
)
=00 6 8:= 069 35 2 80 2:
10 :6 60= 60: 5 9 22= 678
390 = 966 8:2 30 ::9 6:6
10 == 2=2 60 10 0 90: 6=:
380 8 88 670 350 62 =78
10 88 786 =8: 10 = 6:8 7:
370 2 87: 67 3=0 809 62
5 2 := :80 10 2 0== :80
35 2 80 2: 330 99 7:=
299 262
loed dc 0
boss|e . !o|o| . 7= 27: :70
Fig. 10.31. : Exercice de calcul de volume dune retenue deau
Topographie et topomtrie - S. Milles, J. Lagofun
514 PROFILS, CUBATURES
Si lon ne tient pas compte de lirrgularit entre les courbes 360 m et 370 m, on obtient
un volume de 174 712 677 m
3
, soit 0,2 % dcart : on peut donc la ngliger.
Si on calcule le volume en appliquant la formule de Simpson, on obtient :
.
Rsultat : V
total
= 173 699 430 m
3
, soit un cart de 0,3 % par rapport au calcul prcdent.
Remarque
On considre dans ce dernier calcul que le fond de valle est laltitude 320 m (erreur
ngligeable).
Rponse
V
total
10
3
------ S
400
S
324
4 S
390
S
370
S
350
S
330
+ + + ( ) 2 S
380
S
360
S
340
+ + ( ) + + + [ ] =
Topographie et topomtrie - S. Milles, J. Lagofun
88 MESURES ANGULAIRES
2.1.3 6aIaga grossIar au moyan da Ia nIvaIIa sphrIqua
G Si vous devez mettre en station sur un
point donn : calez la nivelle sph-
rique au moyen des pieds du tr-
pied. Posez un pied sur une jambe du
trpied puis faites-la coulisser jusqu'
centrer la bulle de la nivelle. En pra-
tique, il faut intervenir sur plusieurs
pieds l'un aprs l'autre (agir sur le
pied vers lequel semble aller la bulle
et recentrez-la ou ramenez-la vers un
autre pied, et agir ensuite sur ce pied,
etc.).
G Si vous ne devez pas mettre en sta-
tion sur un point donn : calez
directement la nivelle sphrique avec
les trois vis calantes.
la fin de cette phase, la nivelle sph-
rique est centre et le plomb optique ne
doit pas avoir boug du point de mise en station puisque laxe principal (P) de lappareil
pivote autour du point stationn (fig. 3.2).
2.1.4 6aIaga IIn dans una dIrarIIon au moyan
da Ia nIvaIIa IorIqua
Amenez la nivelle torique (t ) parallle
deux vis calantes V1 et V2 (fig. 3.3.).
Centrez la bulle au moyen des deux vis
V1 et V2 en agissant simultanment sur
les deux vis en sens inverse l'une de
l'autre, puis faites tourner l'appareil de
200 gon (reprez-vous sur la graduation
horizontale du socle ou sur les lectures
angulaires horizontales Hz).
Trois cas de figure peuvent se prsenter :
a) Si la nivelle torique est bien rgle,
la bulle revient exactement dans la mme
position aprs un demi-tour de lalidade
(ou dans une position voisine une ou
deux graduations prs : la bulle doit
rester entre les deux repres principaux). C'est le cas le plus courant.
Fig. 3.2. : Calage de la nivelle sphrique
Fig. 3.3. : Calage de la nivelle torique
Topographie et topomtrie - S. Milles, J. Lagofun
MESURES ANGULAIRES 89
b) Si la nivelle torique est compltement drgle, la bulle est compltement dcale
et vient en bute sur un des deux cots du tore. La nivelle doit tre rgle au moyen des
vis de rglage prvues cet effet (voir 2.3).
c) Si la nivelle torique est lgrement drgle, elle se dcale d'un nombre n de
graduations : il suffit dans ce cas de recentrer la bulle de n/2 graduations (fig. 3.4 : deux
graduations vers la gauche car n = 4) et adopter pour la suite cette position de la bulle
comme position de rfrence appele position de calage.
En effet, il doit y avoir un angle droit, 100 gon, entre l'axe de la nivelle torique (t ) et l'axe
principal du thodolite (P). En cas de drglement de la nivelle, cet angle droit prsente
un dfaut .
Fig. 3.4. : Contrle de la nivelle torique
Fig. 3.5. : Doublement de lerreur par demi-tour de lalidade
Topographie et topomtrie - S. Milles, J. Lagofun
90 MESURES ANGULAIRES
La nivelle tant centre en position 1, aprs un demi-tour elle passe en position 2 avec un
dcalage de la bulle de n graduations correspondant deux fois l'angle (fig. 3.5). En
recentrant la bulle de la moiti de l'erreur (n/2 graduations), l'axe de l'appareil est remis
parfaitement vertical, l'axe de la nivelle torique restant dcal du mme angle par
rapport l'horizontale. La bulle de la nivelle n'est pas centre (dcale de n/2 gradua-
tions) mais l'axe de l'appareil est vertical : cest la position de calage. Il reste caler la
bulle dans la mme position dans toutes les directions.
2.1.5 6aIaga dans IouIas Ias dIrarIIons au moyan
da Ia nIvaIIa IorIqua
Pour effectuer un calage fin au moyen de la
nivelle torique, procdez comme suit :
G Amenez l'axe de la nivelle torique sur la
troisime vis calante V3 et, en agissant
sur la seule vis V3, amenez la bulle dans
la position de calage (c'est--dire bulle
centre si vous tiez dans le cas a) du
paragraphe 2.1.4. ou bulle dcale de la
moiti de l'erreur dans le mme sens si
vous tiez dans le cas c) du paragraphe
2.1.4). Sur la figure 3.6., la nivelle est
dans la position de calage de lexemple
prcdent (dcalage de deux graduations
vers la droite repre sur les schmas par
la lettre t ).
G Vrifiez enfin qu'en tournant l'appareil dans une direction intermdiaire la bulle reste
dans sa position de calage. Si le calage n'est pas parfait, il faut reprendre les mmes
oprations pour affiner le calage.
G vitez ensuite tout mouvement brusque de lalidade et, lors du pivotement de celui-
ci, pensez utiliser les deux mains, une sur chaque montant de lalidade pour rpartir
le moment du couple appliqu lappareil.
2.1.6 VrIIIraIIons IInaIas
Enfin, vrifiez que l'appareil est toujours au-dessus
du point de station donn (on saccorde une tol-
rance de centrage de 4 mm, ce qui correspond au
rayon de 4 mm de la demi-sphre intrieure des
clous darpentage, fig. 3.7). Sur les clous de fabrica-
tion allemande, il est mentionn messpunkt qui
signifie littralement point de mesure.
Fig. 3.6. : Calage final sur la 3
e
vis
Fig. 3.7. : Clou darpentage
Topographie et topomtrie - S. Milles, J. Lagofun
MESURES ANGULAIRES 91
Si lappareil sest trop loign (ce qui nest possible que si vous avez fait une faute lors
de la mise en station), dcalez-le en dvissant l'embase et en le faisant glisser sur le
plateau du trpied, puis reprenez le rglage depuis le dbut.
Cette dernire manipulation est nanmoins dconseille car lappareil peut tre trop
excentr par rapport au plateau et venir en porte--faux ; de plus, la marge de manuvre
est faible et il faut de toute faon reprendre le calage de la nivelle torique.
Remarque
cet instant, vrifiez que la nivelle sphrique est bien rgle. Elle doit tre parfaite-
ment centre. Si ce n'est pas le cas, tournez les vis de rglage pour la centrer parfaite-
ment (voir 2.3.1).
2.1.7 gIagas avanI masuras
Rglez la nettet du rticule (croix de vise dans loptique) : pour le faire de manire
prcise, rglez la lunette linfini puis rendez les fils du rticule les plus nets possible en
agissant sur la vis de rglage. Ce rglage permet de placer exactement le rticule dans le
plan de formation de limage virtuelle ; ainsi, lil de loprateur na pas besoin
daccommoder et se fatiguera moins. Si ce rglage nest pas satisfaisant, il est possible
de sen apercevoir en balanant lgrement la tte devant loculaire : le rticule semble
bouger par rapport lobjet vis alors quil devrait rester fixe (on dit quil y a de la
parallaxe). Ensuite, ne touchez plus au rticule et rglez la nettet de la lunette sur
llment vis. Dployez enfin les ventuels miroirs pour lclairage des cercles. Lobser-
vation monoculaire doit se faire les deux yeux ouverts.
Vrifiez que l'appareil est dans sa position de rfrence. Gnralement, le cercle vertical
doit se situer gauche de lobservateur. Pour les stations lectroniques, il est souvent
droite. Cette vrification se fait en positionnant la lunette approximativement lhorizon-
tale et en lisant langle vertical qui doit tre proche de 100 gon. Si la lecture indique une
valeur proche de 300 gon, faites un double retournement, cest--dire le demi-tour de la
lunette et de lalidade pour vous retrouver dans la position de rfrence. Positionnez
ventuellement le zro du limbe sur la rfrence choisie.
2.2 0aractrIstIg0es 4es aIveIIes
2.2.1 FrInrIpa da IonrIIonnamanI d'una nIvaIIa
Une nivelle est un petit rcipient de cristal appel aussi fiole. Elle est remplie dun
mlange dalcool et dther dans lequel subsiste une bulle de vapeur.
Dans une nivelle sphrique, la face suprieure du verre retenant la bulle est une calotte
sphrique (fig. 3.8-a). Une nivelle torique est un fragment de tore (fig. 3.8-b). Les rayons
de courbure sont grands (de lordre du mtre pour les nivelles sphriques et de 10 100
mtres pour les nivelles toriques), donc imperceptible lil. Ces considrations justi-
Topographie et topomtrie - S. Milles, J. Lagofun
92 MESURES ANGULAIRES
fient que la nivelle sphrique soit une nivelle dapproche dont le calage est multidirec-
tionnel, alors que la nivelle torique, qui est unidirectionnelle, sert au calage fin. La
directrice dune nivelle torique est la droite tangente sa face suprieure et situe dans
le plan vertical de son axe.
Remarque
Le frottement qui empche parfois la bulle datteindre sa position dquilibre est appel
erreur de paresse et peut atteindre le dixime de la sensibilit de la nivelle (voir
dfinition de la sensibilit ci-aprs).
a) Pour ses appareils, un constructeur fournit les sensibilits suivantes des nivelles (on
donne en gnral la variation angulaire correspondant au dplacement dune gradua-
tion 2 mm de la bulle ; voir tableau paragraphe 1.3.).
G Nivelle sphrique : 8/2 mm (8 minutes sexagsimales (15 cgon) pour 2 mm) ;
G Nivelle torique : 20/2 mm (20 secondes sexagsimales (6,2 mgon) pour 2 mm).
Calculez le rayon de courbure R de chaque nivelle.
b) Calculez lerreur de point provoque 100 m par une nivelle sphrique mal cale
(dcalage de lordre du millimtre).
a) Nivelle sphrique : R = 0,002 / (8 / 60 * / 180) = 0,9 m
Nivelle torique : R = 0,002 / (20 / 3600 * / 180) = 20,6 m
b) = 4 soit 7 cgon, ce qui provoque une erreur de point de 11 cm 100 m !
Fig. 3.8-a. Nivelle sphrique Fig. 3.8-b. : Nivelle torique
Application
Rponse
Topographie et topomtrie - S. Milles, J. Lagofun
MESURES ANGULAIRES 93
2.2.2 hIvaIIa d'Indax varIIraI
Sur certains appareils (comme le tachomtre dia-
gramme Wild RDS), lindex du cercle vertical est
asservi une nivelle dindex qui permet un calage prcis
de sa verticalit ( faire avant chaque vise). Ce calage
utilise une bulle quun systme de prismes dcoupe en
deux parties : la nivelle est correctement cale lorsque les
deux parties concident (fig. 3.9)
1
. La prcision de calage
dune bulle coupe est de lordre de 0,2 mm alors que
pour un autre systme elle est de lordre de 0,5 mm.
Sur les appareils les plus rcents (T16, T2), la correction dindex est effectue de faon
automatique grce un systme de compensateur pendule (utilisant laction de la
pesanteur) dont le principe est quivalent celui du compensateur des niveaux
automatiques
2
. Ce systme permet dobtenir un calage trs prcis de la verticalit de
lindex, condition que la mise en station du thodolite place au pralable le compensa-
teur dans une plage maximale appele dbattement. Par exemple, pour un T16, la
prcision du calage donne par le constructeur est de 1 ( 0,3 mgon) dans une plage
de dbattement de lindex vertical de 5 ( 9 cgon) (voir tableau paragraphe 1.3.).
2.3 8Iaes 4'0a tho4oIIte
2.3.1 gIaga du pIomb opIIqua
Le principe de rglage du plomb optique est le
mme que celui de la nivelle torique : lors
dune rotation de 200 gon de lalidade, un
plomb optique bien rgl revient exactement
sur le point de station, un plomb optique
drgl se dcale de ce point dune valeur cor-
respondant au double du dfaut de rglage.
Pour le rgler, procdez ainsi :
G Marquez sur une feuille de papier fixe au
sol (ou sur une planchette en bois) un point
(P0, fig. 3.10.) qui sera le point o vous
devez stationner le thodolite laide des
vis calantes exactement sur ce point sans
soccuper des nivelles.
1
Se reporter au schma de principe, chapitre 5 sur le nivellement, paragraphe 3.1.
2
Se reporter au chapitre 5 sur le nivellement, paragraphe 1.2.3.
Fig. 3.9. : Bulle coupe
Fig. 3.10. : Rglage du plomb optique
Topographie et topomtrie - S. Milles, J. Lagofun
NIVELLEMENT DIRECT 187
5
NIVELLEMENT
DIRECT
1 8IllM8I 0I80I 080I8kI8
1.1 FrIacIe
Le nivellement direct, appel aussi nivellement
gomtrique, consiste dterminer la dnivele
H
AB
entre deux points A et B laide dun
appareil : le niveau (ci-contre un NAK20) et
dune chelle verticale appele mire. Le niveau
est constitu dune optique de vise tournant
autour dun axe vertical (fig. 5.3.) : il dfinit donc
un plan de vise horizontal (fig. 5.1.).
La mire est place successivement sur les deux
points. Loprateur lit la valeur m
a
sur la mire
pose en A et la valeur m
b
sur la mire pose en B.
La diffrence des lectures sur mire est gale la
dnivele entre A et B. Cette dnivele est une valeur algbrique dont le signe indique si
B est plus haut ou plus bas que A (si H
AB
est ngative alors B est plus bas que A).
G la dnivele de A vers B est : H
AB
= m
a
m
b
G la dnivele de B vers A est : H
BA
= m
b
m
a
Laltitude H
A
dun point A est la distance compte suivant la verticale qui le spare du
gode (surface de niveau 0, voir chapitre 2). Si laltitude du point A est connue, on peut
en dduire celle du point B par :
NAK20 de Leica
H
B
H
A
H
AB
+ =
Topographie et topomtrie - S. Milles, J. Lagofun
188 NIVELLEMENT DIRECT
Remarque
Laltitude est souvent note Z au lieu de H.
Attention aux ventuelles confusions avec les
coordonnes gocentriques (X, Y, Z).
La porte est la distance du niveau la mire ;
elle varie suivant le matriel et la prcision cher-
che, et doit tre au maximum de 60 m en nivel-
lement ordinaire et 35 m en nivellement de
prcision. Dans la mesure du possible, lopra-
teur place le niveau peu prs gale distance
de A et de B (sur la mdiatrice de AB, fig. 5.2)
de manire raliser lgalit des portes (voir
1.2.7.3).
1.2 le aIvea0
1.2.1 FrInrIpa da IonrIIonnamanI
Le niveau est schmatiquement constitu dune optique de vise (lunette daxe optique
(O)) tournant autour dun axe vertical (appel axe principal (P)) qui lui est perpendicu-
laire (fig. 5.3.). Le rglage de la verticalit de laxe principal est fait au moyen dune
nivelle sphrique. Laxe optique tournant autour de laxe principal dcrit donc un plan
horizontal passant par le centre optique du niveau qui est lintersection des axes (P) et
(O).
Fig. 5.1. : Principe de base du nivellement direct
Fig. 5.2. : galit des portes
Topographie et topomtrie - S. Milles, J. Lagofun
NIVELLEMENT DIRECT 189
Laxe principal (P) peut tre stationn
la verticale dun point au moyen
dun fil plomb, mais gnralement
le niveau est plac un endroit quel-
conque entre les points A et B, si pos-
sible sur la mdiatrice de AB
(fig. 5.2.). Un niveau nest donc pas
muni dun plomb optique comme un
thodolite.
Certains appareils possdent une gra-
duation (ou cercle horizontal) qui
permet de lire des angles horizontaux
avec une prcision mdiocre, de
lordre de 0,25 gon : ils ne sont uti-
liss que pour des implantations ou
des levers grossiers.
Les lments constitutifs dun niveau sont les suivants :
- 1. Embase - 7. Oculaire
- 2. Vis calantes (3 vis) - 8. Anneau amovible
- 3. Rotation lente - 9. Contrle de lautomatisme
- 4. Mise au point sur lobjet - 10. Compensateur pendule
- 5. Objectif - 11. Cercle horizontal (option sur le NA2)
- 6. Viseur dapproche rapide - 12. Nivelle sphrique (invisible ici)
Fig. 5.3. : Schma dun niveau
Doc. Leica : NAK2 (vue en coupe)
4
12
6
5
8
7
9
10
1
3
11
2
Topographie et topomtrie - S. Milles, J. Lagofun
190 NIVELLEMENT DIRECT
Pour dterminer prcisment des dniveles, lappareil doit vrifier :
G la perpendicularit de (O) et (P) ;
G que le fil horizontal du rticule de vise est situ dans un plan perpendiculaire laxe
principal (P) ;
G que laxe optique (O) est parallle la directrice de la nivelle, si cest une nivelle
torique, ou que le plan dcrit par laxe optique (O) tournant autour de laxe principal
(P) est parallle au plan dans lequel est inscrit le cercle de centrage de la bulle, si la
nivelle est sphrique.
1.2.2 MIsa an sIaIIon d'un nIvaau
Le niveau ntant pas (ou trs rarement) stationn sur un point donn, le trpied est pos
sur un point quelconque. Loprateur doit reculer aprs avoir positionn le trpied afin de
sassurer de lhorizontalit du plateau suprieur. Lorsque le plateau est approximative-
ment horizontal, loprateur y fixe le niveau.
Le calage de la nivelle sphrique se fait au moyen des vis calantes, comme indiqu sur
la figure 5.4. : en agissant sur les deux vis calantes V1 et V2 (en les tournant en sens
inverse lune de lautre), loprateur fait pivoter le corps du niveau autour de la droite D3.
Il amne ainsi la bulle de la nivelle sur la droite D2 parallle D3. En agissant ensuite
sur la vis calante V3, il fait pivoter le niveau autour de la droite D1 et centre ainsi la bulle
dans le cercle de centrage de la nivelle sphrique.
Ce calage nest pas trs prcis car la nivelle sphrique est dune sensibilit relativement
faible : par exemple, pour un NA20, la sensibilit de la nivelle sphrique est de 8/2 mm
soit une rotation angulaire de 15 cgon pour un dplacement de 2mm (voir chapitre 3,
2.2). Une erreur de calage de la bulle de 0,2 mm entranerait donc une erreur angulaire
de =1,5 cgon.
Fig. 5.4. : Calage de la nivelle sphrique
Topographie et topomtrie - S. Milles, J. Lagofun
NIVELLEMENT DIRECT 191
La vise sur une mire place 35 m donne un cart e = 35.10
3
. tan 8 mm sur la mire
(voir fig. 5.5.). Nous verrons que les lectures sur mire sont apprcies au millimtre prs :
cette erreur due limprcision de la nivelle est donc inacceptable.
En fait, sur un niveau moderne (dit
automatique ), le calage de la
nivelle sphrique ne sert qu
approcher laxe principal de la
verticale. Lhorizontalit de la
ligne de vise est ensuite cale plus
finement par un automatisme qui
ne fonctionne correctement que
lorsque laxe vertical est proche de
la verticale (voir 1.2.3).
Sur un niveau sans automatisme,
une nivelle torique de directrice
parallle laxe optique permet un
calage prcis de la ligne de vise,
mais elle doit tre cale avant
chaque point sur mire (voir N3 au paragraphe 3). Son calage et son rglage obissent
aux mmes principes que les nivelles toriques des thodolites (voir chapitre 3, 2.2).
1.2.3 La nIvaau auIomaIIqua
Par abus de langage certains niveaux sont dits automatiques laissant croire que tout
se passe sans intervention humaine.
Comme nous lavons vu au paragraphe prcdent, la nivelle sphrique permet un rglage
dapproche de la verticalit de laxe principal. Lorsque celui-ci est proche de la verticale
(dans une certaine plage de dbattement), laxe optique est automatiquement positionn
lhorizontale par un compensateur qui, schmatiquement, est un systme mobile
soumis la pesanteur : sur la figure 5.6., le compensateur est compos de deux prismes
fixes et dun prisme mobile, libre dosciller, suspendu lappareil par des fils. Sous
laction de la pesanteur, la rotation du prisme mobile assure lhorizontalit de la ligne de
vise. Le compensateur peut aussi tre bas sur lquilibre dun liquide, par exemple le
mercure.
Le compensateur fonctionne dans une plage de dbattement donne : en dehors de cette
plage, le mcanisme est en bute et ne remplit plus son rle ; lintrieur de cette plage,
le compensateur oscille librement. Cette plage est par exemple de 30(0,6gon) pour un
NA2, ce qui est suprieur la sensibilit de la nivelle de manire tre certain que
lautomatisme ne soit pas en bute.
La prcision de calage obtenue par ce type dappareil est excellente : par exemple
0,3 (0,9 dmgon) pour un NA2 induit un cart de 0,05 mm sur la mire 35 m.
Fig. 5.5. : Erreur de lecture
due une nivelle fausse
Topographie et topomtrie - S. Milles, J. Lagofun
192 NIVELLEMENT DIRECT
Un bouton de contrle (voir doc. Leica 1.2.1), souvent appel par erreur automatisme
dans les documentations, permet de sassurer du bon fonctionnement du compensateur.
Loprateur appuie sur ce bouton avant deffectuer chaque vise, ce qui fait osciller le
prisme mobile. Il peut ainsi sassurer que limage de la mire oscille librement et se
stabilise rapidement. Ceci permet de contrler que le niveau est toujours bien positionn
avant chaque mesure. Pour quil soit utilisable, le compensateur doit avoir un temps
doscillation trs court; il est donc amorti de manire magntique (aimant permanent),
pneumatique, etc. Sur certains appareils, comme le NA820 ou le NA824 de Leica, ce
bouton de contrle est remplac par un voyant intgr loptique de vise : on le voit
donc en permanence pendant la vise ; il vire au rouge lorsque le compensateur est en
dehors de la plage de fonctionnement.
La fiabilit, la facilit demploi et la prcision des appareils dits automatiques font
quils simposent depuis quelques annes comme matriel de base pour tous les types de
nivellement.
1.2.4 La IunaIIa
Cest une lunette du type lunette astronomique compose dun oculaire (o), dun
objectif (b), dun dispositif de mise au point (m) et dun rticule (r), (fig. 5.7.).
Plac du cot de lobjet, lobjectif (b) est un systme optique fixe convergent grande
distance focale qui fournit une image virtuelle renverse de lobjet vis. La mise au point
est faite par une lentille divergente mobile (m).
Plac du cot de lil, loculaire (o) est un ensemble de lentilles, dont certaines sont
mobiles, qui permet dagrandir et de redresser limage virtuelle de lobjet.
Fig. 5.6. : Schma dun compensateur pendule
Topographie et topomtrie - S. Milles, J. Lagofun
NIVELLEMENT DIRECT 193
Le rticule (r) est une plaque de verre sur laquelle sont graves des lignes dfinissant
laxe optique (fil niveleur (n) et fil vertical (v), fils stadimtriques (s) et (s), fig. 5.7. et
5.8.).
Laxe optique est la droite joignant la croise des fils du rticule et le centre optique de
lobjectif.
.
La lunette schmatise sur la figure 5.7. est une lunette mise au point interne, techno-
logie actuellement la plus courante dont lavantage principal est une meilleure tanchit.
Le schma optique, simplifi, fait apparatre une premire image de lobjet vis inverse
et mise au point dans le plan du rticule par lensemble objectif (b) et lentille mobile (m).
Cette image est ensuite redresse et agrandie par loculaire (o). La mise au point de
loculaire est telle que lobservateur accommode ses yeux linfini, position la plus
reposante pour une personne nayant pas de problmes de vue. On conseille dailleurs
souvent de garder les deux yeux ouverts lorsque lon regarde dans une lunette de ce type.
Le rglage de la nettet du rticule et de limage de lobjet vis se fait comme suit :
1- rglage de loculaire jusqu obtenir la nettet maximale sur les fils du rticule,
lobjectif tant cal linfini ;
2- rglage de lobjectif: amener limage de lobjet vis dans le plan du rticule. la fin
de ce deuxime rglage, limage et le rticule doivent tre nets. Affiner si ncessaire
Pour contrler la qualit dun rglage, loprateur peut, en dplaant la tte devant
lobjectif soit de gauche droite soit de haut en bas, sassurer quil ny a pas de paral-
laxe. Sil y a du parallaxe, les fils semblent se dplacer par rapport limage puisque
limage nest pas exactement dans le plan du rticule.
Les caractristiques dune lunette (voir tableau au paragraphe 1.4.) sont :
Le grossissement G est dfini comme le rapport entre langle sous lequel on voit un objet
travers lobjectif et langle sous lequel il est vu loeil nu. Il est approximativement
gal au rapport des distances focales de loculaire et de lobjectif (G = F
objectif
/ f
oculaire
).
Fig. 5.7. : Schma optique dune lunette moderne
Topographie et topomtrie - S. Milles, J. Lagofun
194 NIVELLEMENT DIRECT
Par exemple, pour un tlescope astronomique du type Newton, la distance focale du
miroir tant de 1000 mm, la distance focale de loculaire tant de 8 mm, on obtient un
grossissement de 125, largement suffisant pour distinguer les anneaux de Saturne ou les
satellites de Jupiter...
La clart dune lunette est le rapport entre lclairement obtenu travers loptique et
celui obtenu loeil nu. Plus le grossissement G est important, moins la lunette est claire.
Le champ est la partie de lespace visible travers la lunette. Plus le grossissement est
important, plus langle de champ est petit. Un champ maximal est souhaitable pour le
ct pratique de lutilisation de linstrument.
Le pouvoir sparateur, ou acuit visuelle, est langle minimal partir duquel deux
points peuvent tre distingus. Le pouvoir sparateur de loeil humain est de lordre de 4
cgon (en vise monoculaire, voir chapitre 7, 5.1.6). Pour une lunette de grossissement
G, il est denviron 200/G dmgon, par exemple, 10 dmgon pour un grossissement G = 20.
Les aberrations de loptique sont les diffrents dfauts des lentilles et groupes de
lentilles : sphricit, astigmatisme, chromatisme, courbure de champ, volume de champ
et distorsion. Ces dfauts sont corrigs au mieux par la combinaison de plusieurs lentilles
convergentes et divergentes composes de matriaux diffrents.
1.2.5 LarIuras sur mIra
La mire est une chelle linaire qui doit
tre tenue verticalement (elle comporte une
nivelle sphrique) sur le point intervenant
dans la dnivele mesurer. La prcision
de sa graduation et de son maintien en posi-
tion verticale influent fortement sur la pr-
cision de la dnivele mesure.
La mire classique est gnralement gra-
due en centimtre. La chiffraison est sou-
vent en dcimtre (fig. 5.8.).
Il existe des mires graduation renverse
pour les optiques ne redressant pas limage
(anciens modles).
Le rticule dun niveau est gnralement constitu de quatre fils :
G le fil stadimtrique suprieur (s), qui donne une lecture m
1
sur la mire ;
G le fil stadimtrique infrieur (s), qui donne la lecture m
2
sur la mire ;
G le fil niveleur (n), qui donne la lecture m sur la mire ;
G le fil vertical (v), qui permet le point de la mire ou dun objet.
Fig. 5.8. : Rticule de vise
Topographie et topomtrie - S. Milles, J. Lagofun
NIVELLEMENT DIRECT 195
Les diffrents types de rticules et de points sont dtaills au chapitre 3, paragraphe
2.4.1.
La lecture sur chaque fil est estime visuellement au millimtre prs (6,64 dm sur la
figure 5.8., fil niveleur). Les fils stadimtriques permettent dobtenir une valeur appro-
che de la porte (voir 1.2.6). Pour chaque lecture, il est judicieux de lire les trois fils
horizontaux de manire viter les fautes de lecture: on vrifie en effet, directement sur
le terrain, que : . Par exemple, figure 5.8. : 6,64 dm (5,69 + 7,60)/2.
On peut estimer lincertitude dune lecture par interpolation sur une mire centimtrique
4/G cgon (voir aussi chapitre 3, 2.4.1), G tant le grossissement de la lunette. Si lon
dsire une incertitude de lecture de 1 mm avec une lunette de grossissement G = 24, la
porte maximale de vise devra tre de :
Dmax = 1.10
3
/(4/24.10
2
. /200) = 38 m.
Pour une lecture sur mire Invar (voir 3.2), lincertitude sur le point est de lordre de
1/G 2/G cgon. Ce qui donne pour un niveau de prcision G = 40 et pour obtenir une
incertitude de lordre du dixime de millimtre :
Dmax = 0,1.10
3
/(2/40.10
2
. /200) = 46 m.
La porte maximale usuellement retenue est de lordre de 30 m du niveau la mire en
nivellement de prcision.
1.2.6 LsIImaIIon da Ia porIa par sIadImIrIa
La porte, cest--dire la distance horizontale entre le point de station et le point vis, est
utile dans les calculs de cheminement (voir 1.5.3). Disposer dun ordre de grandeur de
sa valeur est ncessaire, par exemple, pour vrifier lgalit des portes. Cest le rle des
fils stadimtriques qui, par lecture de la valeur L = m
1
m
2
intercepte sur la mire,
permettent de calculer la distance horizontale Dh
SP
14 cm prs (fig. 5.9.).
1.2.6.1 Farmule Je slaJlmlrle
Nous allons tablir la formule de
stadimtrie ; pour cela, nous raisonnons
partir du schma simplifi de la figure
5.10.a. o limage de lobjet vue par lop-
rateur est renverse. Si lon considre que la
mire utilise est renverse, on retrouve la
situation classique : le fil stadimtrique
suprieur (s) lit la valeur la plus grande m
1
et le fil (s) lit la valeur m
2
. f tant la distance
focale de lobjectif, on peut crire :
m
m
1
m
2
+
2
------------------- =
Fig. 5.9. : Stadimtre
2
---
tan
m
1
m
2
+
2 Dh E ( )
-------------------------
s
2f
----- = =
Topographie et topomtrie - S. Milles, J. Lagofun
196 NIVELLEMENT DIRECT
Le rapport s/f est une constante de lappareil. E est appele constante (ou correction)
danallatisme. Posons :
K est appele constante stadimtrique. La valeur usuelle de K est K=100 ( 1/100 rad
soit 0,6366 gon ou encore 0,5 m 100 m).
De la premire quation, on dduit : Dh = K.(m
1
m
2
) + E
E est appele constante daddition.
Pour les appareils modernes mise au point intrieure, la constante daddition E est
rduite par construction une valeur ngligeable vis--vis de la prcision obtenue sur Dh.
Pour les appareils mise au point extrieure, E est de lordre de 30 cm.
Finalement, on obtient (avec E = 0) :
1.2.6.2 Frclslaa Je lvaluallaa Je k
Le manque de prcision sur la connaissance de Dh vient essentiellement de la valeur de
la constante stadimtrique qui multiplie les erreurs de lecture sur mire par 100 (voir le
chapitre 4 sur les mesures de distances, 4.1.1).
La prcision sur la distance horizontale Dh est de lordre de 14 cm 35 m avec un
niveau classique (type NAK), ce qui est mdiocre et ne fournit quun ordre de grandeur
de Dh suffisant pour les calculs grossiers ou pour les compensations (voir 1.5.3). On
peut obtenir une valeur approche de Dh 1,4 cm prs 35 m si lon utilise un niveau
f
s
-- K
1
2 / 2 ( ) tan
-------------------------- = =
Fig. 5.10-a. : Justification de la formule de stadimtrie
Dh K m
1
m
2
( ) KL = =
Topographie et topomtrie - S. Milles, J. Lagofun
NIVELLEMENT DIRECT 197
de prcision (type NA2 avec micromtre et mire Invar). Par exemple, si lon reprend la
figure 5.8., Dh = 100.(7,60 5,69) = 191 dm donc Dh = 19,1 m 1,4 dm.
1.2.7 6onIrIa aI rgIaga du nIvaau
1.2.7.1 glage Je la alvelle
La directrice de la nivelle torique ou le cercle de centrage de la nivelle sphrique doivent
tre inscrits dans un plan perpendiculaire laxe principal. Pour contrler une nivelle,
procdez ainsi :
G calez la nivelle dans une position bien dfinie de lappareil (reprez-vous sur le cercle
horizontal) ;
G faites pivoter le niveau de 200 gon et vrifiez que la nivelle reste dans ses repres ;
G si ce nest pas le cas, ramenez la bulle vers la position centrale de la moiti de son
dcalage au moyen de ses vis de rglage, lautre moiti tant rattrape par les vis
calantes du niveau. Recommencez la vrification jusqu obtenir un dfaut ngli-
geable (voir chapitre 3, 2).
1.2.7.2 glage Ju rllcule
Le fil horizontal du rticule doit tre situ dans un plan perpendiculaire laxe
principal.
Le contrle et le rglage seffectuent ainsi :
G choisissez un point bien dfini concidant avec le fil horizontal du rticule ;
Fig. 5.10-b. : Contrle et rglage de la nivelle sphrique
Topographie et topomtrie - S. Milles, J. Lagofun
198 NIVELLEMENT DIRECT
G faites pivoter la lunette avec le mouvement lent et vrifier que le rticule reste en
contact avec le point choisi ;
G si ce nest pas le cas, ramenez le rticule sur le point en agissant sur son dispositif de
rglage.
1.2.7.3 glage Je laxe allque
Laxe de vise (O) doit tre perpendiculaire laxe principal (P). Laxe de vise tant
dfini par le centre optique de lappareil et la croise des fils du rticule, on peut modifier
linclinaison de laxe (O) en agissant sur le rticule. Pour mettre en vidence un besoin
de rglage, il faut procder comme suit (voir fig. 5.11. et 5.12.) :
G implantez deux points A et B distants denviron 60m en terrain peu prs horizontal
et rgulier ;
G stationnez le niveau en C, milieu de AB et lire la dnivele H
AB
;
G stationnez en E, situ 6 m de A lextrieur de AB, et lisez nouveau H
AB
;
G dterminez par calcul la valeur du dfaut ventuel appel dfaut dhorizontalit de
laxe de vise (ou encore, de manire impropre, collimation verticale) ;
G si ce dfaut est trop important, cest--dire s'il provoque une erreur de plus de 2 mm
30 m, rglez lappareil. Ceci peut se faire en station en E, en ramenant la ligne de
vise sur la lecture exacte calcule prcdemment (agir pour cela sur les vis de
rglage du rticule ; voir la documentation de lappareil).
a. Explications et calculs
La dnivele relle entre A et B est H
AB
= ma mb. Si le niveau possde un dfaut de
perpendicularit entre (O) et (P), loprateur lit une dnivele fausse H
AB
= ma mb.
Or on peut crire :
ma ma D
AC
tan + =
mb mb D
BC
tan + =
ma mb ma mb D
AC
D
BC
( ) tan + =
Fig. 5.11. : Station avec portes gales
Topographie et topomtrie - S. Milles, J. Lagofun
NIVELLEMENT DIRECT 199
Puisque loprateur stationne au milieu de AB, D
AC
= D
BC
, on obtient ma mb = ma
mb = H
AB
. La dnivele mesure est gale la dnivele relle car leffet de lerreur
dinclinaison sannule du fait de lgalit des portes CA et CB. Ceci signifie quen
pratiquant lgalit des portes, on peut mesurer juste avec un appareil fauss, condition
que son dfaut reste faible. On peut admettre un cart angulaire provoquant sur la mire
une erreur de lordre du double de lapprciation de la lecture, qui est de 1 mm 30 m.
Donc
maxi
est tel que : tan
maxi
= 2.10
3
/30, cest--dire
maxi
= 4 mgon.
La station prcdente a permis de mesurer la dnivele exacte H
AB
.
Sur la figure 5.12., les lectures ma et mb donnent cette fois une dnivele errone
H
AB
. Cest le calcul de cette dnivele fausse qui permet destimer le dfaut dincli-
naison de laxe optique .
On peut crire :
donc :
Donc, finalement :
Il reste calculer et le comparer
maxi
4 mgon. Suivant le signe de , on pourra
mme conclure sur le sens du dfaut dinclinaison, savoir si le niveau vise trop haut ou
trop bas.
Fig. 5.12. : Station dcentre
ma ma D
AE
tan + =
mb mb D
BE
tan + =
ma mb ma mb D
AE
D
BE
( ) tan + =
tan
ma mb ( ) ma mb ( )
D
AE
D
BE
( )
---------------------------------------------------------------- =
tan
H
AB
H
AB
D
AE
D
BE
------------------------------------ =
Topographie et topomtrie - S. Milles, J. Lagofun
200 NIVELLEMENT DIRECT
Remarque
La manipulation doit tre effectue avec soin car la valeur calcule de englobe les
erreurs de lecture, de mise en station, de tenue de la mire, etc. Le plus efficace est de
faire plusieurs stations (trois ou quatre) sur la droite AB. Il est ainsi possible de tracer
une courbe donnant lvolution de lerreur commise sur la dnivele en fonction de la
porte et conclure sur la prsence ou non dune erreur dinclinaison de laxe optique
(voir lexemple ci-dessous).
b. Application
Pour dterminer le dfaut dinclinaison de laxe
optique dun niveau, un oprateur stationne
mi-distance entre deux points A et B distants de 60
m. Il effectue trois autres stations : D 20 m de A
et 40 m de B, E 10 m de A et 50 m de B et F 10
m de A et 70 m de B (voir fig. 5.13.). partir des
lectures donnes du tableau ci-contre, dterminez
sil y a un dfaut dinclinaison de laxe optique
dans lappareil utilis. Dans laffirmative, donnez
la valeur angulaire de ce dfaut et son signe.
Rponse
Stot|on Dn|ve|e 0\\
)*
(dm) D|IIrence de porte , (m)
0 11,32 -13,15 - -1,83 0
D 10,1 -12,03 - -1,87 -
L 10,87 -12,77 - -1,90 -"
f 12,02 -13,99 - -1,97 -$
Fig. 5.13. : Mise en vidence de lerreur dinclinaison de laxe optique dun niveau
Stot|on = (dm) > (dm)
0 11,32 13,15
D 10,1 12,03
L 10,87 12,78
f 12,02 13,99
Topographie et topomtrie - S. Milles, J. Lagofun
NIVELLEMENT DIRECT 207
Lcart type calcul selon la norme DIN 18723, correspond 1 km de cheminement
double (voir 2.3).La constante stadimtrique et la constante daddition sont dfinies
au paragraphe 1.2.6.
La sensibilit de la nivelle est utile surtout pour les instruments non automatiques
nivelle torique (N3 nivelle torique coupe , voir 2.1), ces appareils ncessitant un
rglage de la nivelle torique avant chaque lecture. Pour les appareils automatiques, lindi-
cation importante est la prcision de calage du compensateur (la nivelle sphrique sert
de rglage grossier).
Certains modles proposent en option un cercle horizontal gradu (du gon au cgon)
permettant de faire des levers tachomtriques (mesures angulaires associes des
mesures rapides de distance) ou des implantations en terrain rgulier.
1.5 0hemIaemeats sImIes
Lorsque les points A et B sont situs de sorte quune seule station du niveau ne suffit pas
dterminer leur dnivele (loignement, masque, dnivele trop importante, etc.), il
faut dcomposer la dnivele totale en dniveles lmentaires laide de points inter-
mdiaires (I1, I2, ..., voir fig. 5.16.). Lensemble de ces dcompositions est appel
nivellement par cheminement.
Un cheminement encadr part dun point origine connu en altitude, passe par un
certain nombre de points intermdiaires et se referme sur un point extrmit diffrent
du point dorigine et galement connu en altitude. Le cheminement de la figure 16 est
encadr entre A et B.
Lorsque lon cherche dterminer laltitude dun point extrmit B partir de celle
connue dun repre A, on effectue gnralement un cheminement aller-retour de A vers
A en passant par B. Ceci permet de calculer laltitude de B et de vrifier la validit des
mesures en retrouvant laltitude de A.
Lorsquun cheminement constitue une boucle retournant son point de dpart A, on
lappelle cheminement ferm. Il est trs employ pour les raisons suivantes :
G il permet la dtermination des altitudes mme quand on ne connat quun seul repre ;
G il est possible de calculer un tel cheminement en affectant une altitude arbitraire un
point de dpart fixe et durable ; une simple translation permettra de passer des
altitudes de ce systme local aux altitudes vraies ;
G il permet un contrle de fermeture qui est indpendant de la prcision de connaissance
de laltitude du point de rfrence.
1.5.1 FraIIqua du nIvaIIamanI par rhamInamanI
Un nivellement par cheminement seffectue par les oprations suivantes :
Topographie et topomtrie - S. Milles, J. Lagofun
208 NIVELLEMENT DIRECT
G la mire tant sur le point origine A, loprateur stationne le niveau en S1 dont il
dtermine lloignement en comptant le nombre de pas sparant A de S1, de manire
ne pas dpasser la porte maximale de 60 m. Loprateur fait une lecture arrire,
cest--dire dans le sens de parcours choisi, sur le point A, note m
ar A
;
G le porte-mire se dplace pour venir sur le premier point intermdiaire I1 le plus stable
possible (pierre, socle mtallique appel crapaud , piquet etc.) et dont il dtermine
lloignement en comptant lui-mme le nombre de pas sparant A de S1 afin de
pouvoir reproduire ce nombre de pas de S1 I1 ;
G toujours stationn en S1, loprateur lit sur la mire la lecture avant sur Il note m
av I1
;
il est alors possible de calculer la dnivele de A I1 de la manire suivante :
H
1
= m
ar A
m
av I1
= lecture arrire sur A lecture avant sur I1.
G Loprateur doit lire les fils stadimtriques et vrifier que m (m
1
+ m
2
)/2 ;
loprateur se dplace pour choisir une station S2 et ainsi de suite ;
G les dniveles partielles sont les suivantes :
m
ar A
m
av I1
= H
1
dnivele de A vers I1
m
ar I1
m
av I2
= H
2
dnivele de I1 vers I2
... ...
m
ar I(i1)
m
av I(i)
= H
i
dnivele de I(i1) vers I(i)
... ...
m
ar I(n-1)
m
av B
= H
n
dnivele de I(n1) vers B
La dnivele totale H
AB
de A vers B est gale la somme des lectures arrire diminue
de la somme des lectures avant.
Fig. 5.16. : Cheminement de nivellement
m
ar
i 1 =
i n =
m
av
i 1 =
i n =
H
i
i 1 =
i n =
H
AB
= =
Topographie et topomtrie - S. Milles, J. Lagofun
NIVELLEMENT DIRECT 209
Remarque
Si le cheminement est ferm, la dnivele totale doit tre gale zro.
1.5.2 FarmaIura du rhamInamanI
Connaissant laltitude de A, on peut calculer nouveau partir des mesures de terrain,
laltitude de B : on appelle cette valeur de H
B
la valeur observe, note H
B obs
.
Elle est dfinie par :
Si les mesures taient exemptes derreurs, on retrouverait exactement laltitude connue
H
B
. En ralit, il existe un cart appel erreur de fermeture du cheminement (ou plus
simplement fermeture) qui est soumis tolrance. Cette fermeture note f
H
vaut :
Un moyen mnmotechnique permettant de se souvenir du sens de cette soustraction est
de se rappeler que le signe de lerreur de fermeture f
H
doit tre positif si laltitude
observe est suprieure laltitude relle cest--dire : f
H
> 0 implique que H
B obs
> H
B
.
Si lon appelle T
H
la tolrance rglementaire de fermeture du cheminement, on doit
donc vrifier : | f
H
|< T
H
. Si ce nest pas le cas, les mesures doivent tre refaites.
Les tolrances rglementaires sont donnes par larrt du 21 janvier 1980 (voir 1.3.5).
1.5.3 6ompansaIIon du rhamInamanI
La compensation est lopration qui consiste rpartir la fermeture sur toutes les
mesures.
La compensation, note C
H
, est donc loppose de la fermeture, cest--dire :
Cet ajustement consiste modifier les dniveles partielles en rpartissant la compensa-
tion totale C
H
sur chacune delle. Cette rpartition peut tre effectue de plusieurs
manires :
1- proportionnellement au nombre N de dniveles : on choisira ce type de compen-
sation dans le cas o la fermeture est trs faible cest--dire infrieure lcart type
H
= T
H
/
2,7.
Donc la compensation sur chaque dnivele est :
Dans le cas o la fermeture est comprise entre cart type et tolrance, on peut choisir
entre les deux mthodes de rpartition suivantes :
H
B obs
H
A
H
i
i 1 =
n
+ =
f
H
H
B obs
H
B
=
C
H
f
H
=
C
Hi
C
H
N
------- =
Topographie et topomtrie - S. Milles, J. Lagofun
210 NIVELLEMENT DIRECT
2- proportionnellement la porte : on considre que plus la porte est importante et
plus la dnivele peut tre entache derreur. Ceci oblige connatre un ordre de grandeur
de la porte, qui est obtenu par stadimtrie.
La compensation sur chaque dnivele est alors :
3- proportionnellement la valeur absolue de la dnivele : la compensation appli-
quer chaque dnivele partielle du cheminement vaut donc :
Remarque
Lajustement nest quun mal ncessaire qui namliore jamais les mesures et rend
donc inutiles les dcimales de calcul sans signification ; donc les compensations par-
tielles sont arrondies, au mieux, au millimtre leur somme devant toutefois tre rigou-
reusement gale la compensation totale.
Le contrle du calcul consiste vrifier que laltitude de lextrmit obtenue de proche
en proche depuis celle de lorigine laide des dniveles compenses est strictement
gale laltitude connue.
1.5.4 LxampIa da rarnaI da nIvaIIamanI rhamIn
Le carnet de nivellement chemin propos ci-aprs est disponible sous la forme
dun tableau Excel (fichier NIMINAK.XLS du cdrom). La mthode de com-
pensation choisie est fonction de la prsence ou non des lectures stadimtriques.
Si elles sont prsentes, la compensation est dans tous les cas proportionnelle aux
portes. Si elles sont absentes, la compensation est proportionnelle aux nombre
de dniveles. Le tableau TABNIV.XLS du cdrom peut servir de carnet vide
pour une saisie sur le terrain.
Remarque
G Les dniveles obissent la rgle gnrale suivante :
dnivele = lecture arrire lecture avant ;
G les calculs de dnivele sont faits en diagonale puisque, les stations napparaissant
pas sur le tableau, on note en face de chaque point la lecture arrire et la lecture
avant qui sont faites sur deux stations diffrentes ;
G la compensation peut tre effectue directement sur les dniveles. Lors dun calcul
manuel, on peut rayer la dnivele mesure et crire au-dessus la dnivele com-
pense qui servira au calcul des altitudes.
C
Hi
C
H
L
i
L
i
------------ =
C
Hi
C
H
H
i
H
i
-------------------- =
Topographie et topomtrie - S. Milles, J. Lagofun
NIVELLEMENT DIRECT 211
G laltitude de chaque point se calcule de proche en proche par la formule ci-dessous
(attention aux units) :
Le tableau suivant est ralis partir du fichier TABNIV.XLS pour Excel.
Carnet de nivellement ordinaire Date : 01/05/96
Altitude de dpart : 124,968 m Matriel : NA 0 (a)
Altitude d'arrive : 128,924 m Oprateur : Milles
* compensation.
Fermeture : f
H
= 16 mm ; Tolrance : T
H
= 18 mm.
Conclusion : tolrance vrifie pour 63 dniveles au kilomtre.
1.6 0hemIaemeat mIxte
Depuis une station quelconque du niveau dans un cheminement, et aprs avoir enregistr
la lecture arrire sur le point de cheminement prcdent, loprateur vise plusieurs points
de dtail et effectue sur chacun deux une lecture unique qui est donc une lecture avant.
Ensuite, il termine la station par la lecture avant sur le point de cheminement suivant . Par
exemple, sur la fig. 5.17., les points 1, 2 et 3 sont rayonns depuis la station S1 dont le
n
o|nt
v|s
Lectures orr|re Lectures ovont
orte
,D
m
Dn|ve|es
0omp.*
mm
A|t|tude
m
S'
mm
N|v
mm
S
mm
S'
mm
N|v
mm
S
mm
0 (mm)
+ -
1 k1 1 973 1 925 1 878 2=,968
8,9 629 -2
2 l1 1 53 1 52= 1 508 1 3=3 1 29 1 2=9 2:,:9:
:, =7 -
3 l2 1 8 1 83 1 80 1 388 1 377 1 35 2:,7=
,9 789 -
4 l3 1 01 0 988 0 955 1 07 1 0=7 1 017 26,:29
2,0 -50 -
5 5= 1 9 1 1 1 2 1 7 1 38 1 08 2:,878
2,0 6: -
l= 1 709 1 78 1 =7 1 072 1 0= 1 022 26,=9
2,: =:2 -
7 l5 1 3= 1 0= 1 572 1 258 1 22 1 195 26,9=2
2,: 880 -
8 l 1 33 1 333 1 30= 1 30 1 27= 1 2=3 27,27
2=,2 :80 -8
9 l7 1 31= 1 155 0 995 0 89 0 803 0 713 27,798
8=,6 80 -=
10 k3 0 039 0 025 0 012 28,92=
9 de|c|cs =8,7 = 622 -6:0 -6
H
i
H
i 1
H
i 1 i
+ = C
i
+
Topographie et topomtrie - S. Milles, J. Lagofun
212 NIVELLEMENT DIRECT
point arrire est la rfrence (R) et le point avant A. L'opration en S1 est appele
rayonnement. Lorsquun cheminement comprend des points rayonns et des points
chemins, on dit que cest un cheminement mixte.
Le cheminement de la figure
5.17. passe par les points R, A,
B, C, D, E et R. Les points 1, 2,
3, 4, 5, 6 et 7 sont rayonns.
Lensemble est un cheminement
mixte encadr entre R et R.
Sur le carnet de nivellement, un
point rayonn est reprable
directement au fait quil ne com-
porte pas de lecture arrire (ou
bien la mme lecture arrire que
le point prcdent du tableau ;
voir lexemple).
La rgle de lgalit des portes
doit aussi sappliquer aux points
rayonns pour assurer une prci-
sion optimale. Il faut donc
choisir une station la plus centrale possible par rapport tous les points viser.
Le mesurage termin, on calcule dabord le cheminement sans tenir compte des
points de dtails rayonns.
Puis on calcule les points rayonns et on les note, par exemple, dans une autre couleur.
Leur calcul est diffrent de celui des points chemins. En effet :
G tous les points rayonns depuis une mme station sont calculs partir de laltitude
du point arrire de la station. Cette diffrence de calcul entrane souvent des erreurs
qui peuvent tre limites par le respect du calcul en deux tapes : dabord le chemi-
nement seul puis les rayonnements et par lemploi de couleurs diffrentes ;
G il ny a pas de compensation sur la dnivele dun point rayonn puisquil ny a pas
de contrle possible de sa valeur. Laltitude du point rayonn dpend de celle, dj
compense, du point arrire du cheminement : H(du point rayonn) = H(du point du
cheminement) + H. Ce manque de contrle exige une lecture particulirement atten-
tive sur ces points (par exemple, une lecture sur les trois fils).
Remarque
Sur chantier, on calcule souvent l'altitude d'un point rayonn en faisant intervenir la
notion d'altitude du plan de vise, cest--dire l'altitude de l'axe optique du niveau :
elle est gale l'altitude du point de rfrence arrire de la station augmente de la
lecture sur mire en ce point. Par exemple, le plan de vise de la station 1 (voir tableau
Fig. 5.17. : Cheminement mixte encadr
Topographie et topomtrie - S. Milles, J. Lagofun
NIVELLEMENT DIRECT 213
suivant) est : Hpv
S1
= 124,968 + 2,591 = 127,559 m. L'altitude d'un point rayonn est
alors l'altitude du plan de vise diminue de la lecture sur la mire en ce point. Par
exemple, pour le point 2 : H
2
= Hpv
S1
1,922 = 125,637 m.
Exemple : le tableau ci-aprs ralis partir du NIMINAK.XLS, dtaille le
calcul du parcours schmatis la figure 5.17. Le tableau NIMINAK.XLS traite
automatiquement les points rayonns : il suffit de ne pas entrer de lecture arrire.
Carnet de nivellement ordinaire Date : 01/05/96
Altitude de dpart : 124,968 m Matriel : NA 0 (a)
Altitude d'arrive : 125,703 m Oprateur : Dupond
* compensation.
Dans ce parcours, il y a sept points rayonns et six points chemins.
Fermeture : f
H
= 14 mm ; Tolrance : T
H
= 15 mm.
Conclusion : tolrances vrifies pour 29 dniveles au kilomtre.
n
o|nt
v|s
Lectures orr|re Lectures ovont
orte
,D
m
Dn|ve|es
0omp.*
mm
A|t|-
tude
en m
S'
mm
N|v
mm
S
mm
S'
mm
N|v
mm
S
mm
, (mm)
+ -
1 k
2 703 2 591 2 =80 2=,968
( 299)
2 1
1 =07 1 292 1 177 26,267
(0 669)
3 2
2 033 1 922 1 812 2:,687
( :==)
4 3
1 12 1 0=7 0 97 26,:2
=7,8 068 -8
5 A
2 835 2 813 2 791 1 53 1 528 1 =03 26,028
9,= 767 -
3
1 7=9 1 78 1 07 1 072 1 0= 1 022 27,79=
(0 =:2)
7 =
1 258 1 22 1 195 28,2=6
(-0 2=7)
8 5
1 973 1 925 1 878 27,:=7
28,9 0089 -2
9 C
1 71= 1 0= 1 =92 1 712 1 39 1 55 27,88
==,6 - =00 -8
10 u
1 =23 1 333 1 2== 3 11 3 00= 2 892 26,=28
(0 0:9)
11
1 35 1 27= 1 193 26,=87
(-0 9)
12 7
1 1 1 52= 1 =28 26,287
86,2 0 :80 -2
13 L
1 2= 1 155 1 0=5 0 89 0 803 0 713 26,9:6
=8, - 2:0 -8
14 k'
2 511 2 =05 2 299 2:,708
o|e|s c|cm|es 209,: 8 899 -2 6:0 -=
Topographie et topomtrie - S. Milles, J. Lagofun
214 NIVELLEMENT DIRECT
Remarque
Les tableaux peuvent mlanger plusieurs units (mm, dm et m). Ceci a un aspect
formateur en obligeant loprateur comme le calculateur faire attention et prciser
les units utilises. Mais cest aussi une source derreur. Il est donc recommand de
noter les lectures sur mire directement en millimtre (par exemple 1 264 mm au lieu de
12,64 dm) pour deux raisons :
G cette notation permet de supprimer la virgule, souvent mal retranscrite ;
G elle offre une plus grande facilit dans les calculs si toutes les colonnes sont en
millimtres, excepte celle des altitudes quil suffira de diviser par 1 000 pour
retrouver des mtres, ou bien de noter sans virgule, par exemple : 125 703.
Pensez noter de mme tous les chiffres lus sur la mire (par exemple 0 132 ) pour viter
les confusions dunits.
1.7 0as artIc0IIers 4e chemIaemeats
1.7.1 FoInIs audassus du pIan da vIsa
En nivellement souterrain, il arrive que les points niveler soient situs au-dessus du plan
de vise (fig. 5.18.).
Le porte-mire appuie la mire sur le point situ au-dessus du plan de vise : la mire est
lenvers. Loprateur lit toujours sur les fils (s, n et s), dans le sens de la chiffraison de
la mire. Pour retrouver la convention adopte (Dnivele = lecture arrire lecture
avant), il suffit de considrer que les lectures faites avec une mire tenue lenvers sont
ngatives. Elles seront donc prcdes dun signe moins sur le carnet de nivellement, ce
Fig. 5.18. : Nivellement en tunnel
Topographie et topomtrie - S. Milles, J. Lagofun
NIVELLEMENT DIRECT 215
qui permettra de surcrot de les diffrencier des autres dans le cas o lon vise alternati-
vement des points situs en dessus ou en dessous du plan de vise. Si lon progresse de
A vers B (fig. 5.18.), on peut crire : H
B
= H
A
+ H
AB
= H
A
+ (m
a
m
b
).
La dnivele est bien ngative (B est plus bas que A) puisque ma < mb < 0. On retrouve
H
AB
= (m
a
m
b
).
1.7.2 FoInIs aIIarnaIIvamanI an dassus ou an dassous
du pIan da vIsa
Quelle est laltitude du point S si celle de la rfrence R est de 23,840 m (fig. 5.19.) ?
1.7.3 FoInI nodaI da rhamInamanIs
Le calcul de laltitude dun point nodal altimtrique se traite exactement comme celui des
coordonnes planimtriques dun point nodal (voir tome 2 chap. 2 , 2 ).
o|nts orr|re (mm) ovont (mm) Dn|ve|e 0 (mm) A|t|tude 0 (m)
k 1 7= 28,8=0
8 796
A - 3 58 -2 050 27,686
- :86
8 --3 589 - 2 122 26,00
--2 :=2
S -1 0=7 28,::8
Fig. 5.19. : Cheminement en tunnel
Application
Rponse
Topographie et topomtrie - S. Milles, J. Lagofun
NIVELLEMENT DIRECT 219
et R
2
: Hpv
1
= 124,248 + 0,6110,01 = 124,849 m
Hpv
2
= 122,830 + 2,0310,01 = 124,851 m
On trouve donc une altitude moyenne de 124,860 m (fermeture de 2 mm), partir de
laquelle les points rayonns sont calculs, soit :
H
I1
= 124,850 (1,734 0,002) = 123,118 m
H
I2
= 124,850 (0,566 0,006) = 124,290 m.
La colonne vrif. affiche la valeur de (s+s)/2 n : contrle de la cohrence des
donnes.
La colonne porte est lvaluation de la porte par stadimtrie P = 100 . (s s).
La colonne Cor. est le calcul de la correction due linclinaison apporter la lecture
n : P. tan.
La colonne H donne les dniveles corriges du dfaut dinclinaison de laxe optique.
2 8IllM8I 0I80I 0 F80I8I08
La prcision de calage est obtenue par un compensateur trs prcis. Par exemple, pour le
NA2, la prcision de calage du compensateur est de lordre de 0,09 mgon sur une plage
de dbattement de 55 cgon.
2.1 8Ivea0x 4e rcIsIoa
Appels frquemment niveaux dingnieur
dans les documentations techniques, les
niveaux de prcision diffrent des niveaux ordi-
naires par :
G un grossissement plus important permettant
des vises plus prcises : G = 30 35 au lieu
de 20 25 ;
G une meilleure prcision de calage de laxe
principal : 0,1s 0,2 (1 3 dmgon) ;
G un cart type plus faible (voir la classifica-
tion et les caractristiques au paragraphe 1.4.).
NA2. Doc. Leica
Topographie et topomtrie - S. Milles, J. Lagofun
NIVELLEMENT INDIRECT
NIVELLEMENT
INDIRECT
Il est intressant dtudier en dtail cette technique puisque cest le moyen de mesure
utilis par les stations totales. Il est donc appel se gnraliser, mme sil reste moins
prcis sur les dniveles que le nivellement direct.
F8I80IF 00 8IllM8I I80I80I
I8I6080MI8I00
Le nivellement indirect trigono-
mtrique permet de dterminer la
dnivele H entre la station T
dun thodolite et un point P vis.
Ceci est fait par la mesure de la
distance incline suivant la ligne
de vise Di et de langle znithal
(not V sur la figure 6.1.).
partir du schma, on peut crire
que :
H
TP
est la dnivele de T vers P.
ht est la hauteur de station (ou hauteur des tourillons).
hv est la hauteur de voyant ou plus gnralement la hauteur vise au-dessus du point
cherch (on peut aussi poser une mire en P).
H
TP
= ht + Di.cosV hv
Fig. 6.1. : Nivellement indirect trigonomtrique
Topographie et topomtrie - S. Milles, J. Lagofun
NIVELLEMENT INDIRECT
Remarque
G Le terme Di.cosV est appel dnivele instrumentale . Il est not h
i
. Cest la
dnivele entre laxe des tourillons (t) du thodolite et le point p vis.
G Dh ne dpend pas de hv et ht : elle nest fonction que de Di et de V.
G Lappellation trigonomtrique vient des calculs de trigonomtrie simples don-
nant H et Dh.
8IllM8I I80I80I 6008I00
Ce type de nivellement permet la dtermi-
nation de la dnivele entre le point de sta-
tion T et un point P vis partir de la
connaissance des coordonnes planimtri-
ques de T et P et de la mesure de langle
vertical V (fig. 6.2.).
La distance horizontale Dh est dduite des
coordonnes de T et P comme suit :
Dh
T
est la distance horizontale entre T et P rduite la station T.
h
T
est la hauteur du point de station au-dessus de lellipsode (voir lexemple de calcul
complet au chapitre 4 paragraphe 7.).
R
N
6 380 km en France.
On en dduit la distance horizontale Dh :
Dh
TP
= Di.sinV
On en dduit la distance suivant la pente Dp :
Dp =
La dnivele instrumentale hi vaut :
La dnivele cherche de T vers P vaut donc :
H
TP
= ht + Dh
T
. cotanV hv
H
2
Dh
2
+
Fig. 6.2. : Nivellement indirect godsique
Dr E
T
E
P
( )
2
N
T
N
P
( )
2
+ =
Do Dr Cr
Dr
1 kr +
-------------- Dr 1 kr ( ) = =
Dh
T
Do 1
h
T
R
N
------ +
=
h
i
Dh
T
V tan
----------- Dh
T
cotanV = =
Topographie et topomtrie - S. Milles, J. Lagofun
MESURES ANGULAIRES 83
3
MESURES
ANGULAIRES
La mesure dangles est toujours indispensable en topographie. Par rapport aux mesures
de distance au moyen de technologies modernes (IMEL, chap. 4 6 ou GPS, chap. 7 1),
les mesures angulaires gardent lavantage dtre dautant plus prcises que les portes de
mesures sont longues.
1 l Ih000lII 0FII00M0k8I00
Un thodolite est un appareil permettant de mesurer des angles horizontaux (angles
projets dans un plan horizontal) et des angles verticaux (angles projets dans un plan
vertical).
Le terme thodolite optico-mcanique regroupe lensemble des appareils lecture
mcanique par vernier gradu en comparaison aux appareils optico-
lectroniques , appels aussi stations, dont la lecture se fait sur un cran affichage
numrique et qui intgrent souvent un appareil de mesure lectronique des distances
(IMEL).
La mcanique de base des stations lectroniques est souvent la mme que celle des
thodolites classiques. Par exemple, le modle T2000 de Leica est une station lectro-
nique de prcision btie sur la base du T2 mcanique. Les prcisions de lecture angulaire
sont donc comparables : lcart type (tome 2 chap. 5 12) constructeur pour une mesure
angulaire sur une direction est de 2,5 dmgon sur un T2 et de 1,5 dmgon sur un T2000.
1.1 IermIaoIoIe
Rappelons quelques dfinitions.
Topographie et topomtrie - S. Milles, J. Lagofun
84 MESURES ANGULAIRES
Un goniomtre permet de mesurer des angles horizontaux (appels aussi angles azimu-
taux) ou verticaux.
Un cercle permet la mesure dangles horizontaux uniquement.
Lclimtre mesure des angles verticaux uniquement.
Le clisimtre permet la mesure directe de pentes avec une prcision de 0,5 %.
Le tachomtre est un thodolite coupl un systme de mesure de distances (du grec
tacho, qui signifie rapide). On distingue :
G le tachomtre diagramme est un ancien modle mcanique utiliser avec des
mires spciales. La prcision espre sur une mesure de distance est de lordre de
14 cm pour une distance de 50 m (chap. 4 4. et 5).
G le tachomtre lectronique est un thodolite coupl un instrument de mesure
lectronique des longueurs (IMEL, voir la prcision de ce type dappareil au chapitre
4, paragraphe 6.3.).
1.2 FrIacIe 4e foactIoaaemeat
La figure 3.1 montre le schma de principe du fonctionnement dun thodolite.
Fig. 3.1. : Schma de principe dun thodolite
Topographie et topomtrie - S. Milles, J. Lagofun
MESURES ANGULAIRES 85
G (P) : axe principal, il doit tre vertical aprs la mise en station du thodolite et doit
passer par le centre de la graduation horizontale (et le point stationn).
G (T) : axe secondaire (ou axe des tourillons), il est perpendiculaire (P) et doit passer
au centre de la graduation verticale.
G (O) : axe optique (ou axe de vise), il doit toujours tre perpendiculaire (T), les
trois axes (P), (T) et (O) devant tre concourants.
G L'alidade : cest un ensemble mobile autour de laxe principal (P) comprenant le
cercle vertical, la lunette, la nivelle torique dalidade et les dispositifs de lecture
(symboliss ici par des index).
G Le cercle vertical (graduation verticale). Il est solidaire de la lunette et pivote autour
de laxe des tourillons (T).
G Le cercle horizontal ou limbe(graduation horizontale). Il est le plus souvent fixe par
rapport lembase mais il peut tre solidaris lalidade par un systme dembrayage
(T16) : on parle alors de mouvement gnral de lalidade et du cercle autour de (P) ;
cest le mouvement utilis lors du positionnement du zro du cercle sur un point
donn. Lorsquil est fixe par rapport au socle, on parle de mouvement particulier :
cest le mouvement utilis lors des lectures angulaires. Sur le T2, un systme de vis
sans fin permet dentraner le cercle et de positionner son zro.
1.3 0aractrIstIg0es 4es tho4oIItes otIcomcaaIg0es
Les caractristiques des thodolites optico-mcaniques donnes par les constructeurs
sont les suivantes
1
:
Mod|es (gomme Le|co) I05 I0 I1 I1 I2
cort type (mgon) 3 3 1 1 0,25
Lecture d|recte (mgon) 10 10 2 5 0,1
Lecture est|me (mgon) 2 2 1 1 -
0ross|ssement 19 30 30 30 30
0homp 100 m (m) 3,9 27 27 27 29
0onstonte stod|mtr|que 100 100 100 100 100
0onstonte d'odd|t|on 0 0 0 0 0
Sens|b. n|v. sphr|que (cgon]2 mm) 19 19 15 15 15
Sens|b. n|v. tor|que (mgon]2 mm) 19 19 9 9
rc|s|on co|oge |ndex vert|co| mgon - - 0,3 0,3 0,1
|oge de dbottement (co|oge) cgon - - = 9 9
1
Les termes employs dans ce tableau sont dtaills dans la suite du chapitre. Pour les termes concer-
nant la lunette de vise, voir le chapitre 5, paragraphe 1.2.4.
Topographie et topomtrie - S. Milles, J. Lagofun
86 MESURES ANGULAIRES
Ci-dessous deux thodolites Wild (Doc. Leica).
Lgende
1. lo|qec omo|b|c 12. Comme|o|ce dc |cc|ec zv
2. v|sce d'ooc|c 13. N|c||c d'o||dodc
3. v|s dc b|ocoqc dc |o |eec| |c 1=. v|s d'o||dodc dc ||e o|e|
=. Oce|o|c dc |o |eec| |c 15. N|c||c s||qec
5. v|s dc ||e o|e| 1. uboyoqc de ||mbc [!1}
. Coe||c d'oe|omo||smc 17. Ccc|c c||co|
7. Lmbosc omo|b|c 18. Ccc|c |o|zoe|o|
8. l|omb o||qec 19. v|s co|oe|cs
9. V|com|c o||qec 20. Obcc|||
10. 3oqec dc m|sc oe o|e| 21. 3|ocoqc dc |'cmbosc
11. V|coscoc dc |cc|ec 22. lc|o|oqc dcs ccc|cs
1
3
=
2
5
7
8
9
10
11
12
13
1=
1
17
18
19
20
21
22
1
1=
17
20
19
13
1
7
15
8
T16 (coupe) T2 vue extrieure
Topographie et topomtrie - S. Milles, J. Lagofun
MESURES ANGULAIRES 87
2 MI8 8 8IkII08 0'08 Ih000lII :
86lk68, l0I088
2.1 MIse ea statIoa
La mise en station dun thodolite consiste caler laxe principal la verticale dun point
de station donn. La mthode de mise en station dtaille dans ce paragraphe suppose
lutilisation dun trpied classique (par comparaison au trpied centrant Kern). Elle
donne toutefois le principe de base commun tous les types de trpieds. Cette mthode
vite lemploi du fil plomb qui, dans la pratique, est peu commode : trop sensible,
inutilisable dans un vent mme faible et le plus souvent introuvable...
2.1.1 MIsa hauIaur du IrpIad
La mise hauteur du trpied seffectue comme suit :
G Fixez l'appareil sur le trpied en prenant soin de vrifier que les trois vis calantes sont
peu prs mi-course.
G Rglez l'oculaire la hauteur des yeux de l'oprateur (ou mieux, lgrement en
dessous de cette hauteur : il est plus facile de se baisser que de se hausser). Profitez-
en pour rgler la nettet du rticule de vise. Pour cela, utilisez les graduations en
dioptries de loculaire.
2.1.2 6aIaga grossIar d'approrha
G Si vous devez mettre en station sur un point donn : soulevez deux pieds du trpied
tout en regardant dans le plomb optique et dplacez l'ensemble afin de positionner le
plomb optique prs du point de mise en station (inutile ce stade de le positionner
exactement sur le point). Enfoncez ensuite les pieds dans le sol puis positionnez le
plomb optique exactement sur le point au moyen des trois vis calantes. cet
instant, laxe principal passe par le point de station mais nest pas vertical.
G Si vous ne devez pas mettre en station sur un point donn (station libre) : reculez-
vous pour vrifier que l'appareil est peu prs vertical, puis enfoncez les pieds du
trpied dans le sol.
G Si vous devez mettre en station sous un point donn, utilisez soit un fil plomb
pendant depuis le point au plafond jusquau repre situ sur le dessus de la lunette
du thodolite (en position de rfrence), soit un viseur znithal.
Topographie et topomtrie - S. Milles, J. Lagofun
88 MESURES ANGULAIRES
2.1.3 6aIaga grossIar au moyan da Ia nIvaIIa sphrIqua
G Si vous devez mettre en station sur un
point donn : calez la nivelle sph-
rique au moyen des pieds du tr-
pied. Posez un pied sur une jambe du
trpied puis faites-la coulisser jusqu'
centrer la bulle de la nivelle. En pra-
tique, il faut intervenir sur plusieurs
pieds l'un aprs l'autre (agir sur le
pied vers lequel semble aller la bulle
et recentrez-la ou ramenez-la vers un
autre pied, et agir ensuite sur ce pied,
etc.).
G Si vous ne devez pas mettre en sta-
tion sur un point donn : calez
directement la nivelle sphrique avec
les trois vis calantes.
la fin de cette phase, la nivelle sph-
rique est centre et le plomb optique ne
doit pas avoir boug du point de mise en station puisque laxe principal (P) de lappareil
pivote autour du point stationn (fig. 3.2).
2.1.4 6aIaga IIn dans una dIrarIIon au moyan
da Ia nIvaIIa IorIqua
Amenez la nivelle torique (t ) parallle
deux vis calantes V1 et V2 (fig. 3.3.).
Centrez la bulle au moyen des deux vis
V1 et V2 en agissant simultanment sur
les deux vis en sens inverse l'une de
l'autre, puis faites tourner l'appareil de
200 gon (reprez-vous sur la graduation
horizontale du socle ou sur les lectures
angulaires horizontales Hz).
Trois cas de figure peuvent se prsenter :
a) Si la nivelle torique est bien rgle,
la bulle revient exactement dans la mme
position aprs un demi-tour de lalidade
(ou dans une position voisine une ou
deux graduations prs : la bulle doit
rester entre les deux repres principaux). C'est le cas le plus courant.
Fig. 3.2. : Calage de la nivelle sphrique
Fig. 3.3. : Calage de la nivelle torique
Topographie et topomtrie - S. Milles, J. Lagofun
MESURES ANGULAIRES 89
b) Si la nivelle torique est compltement drgle, la bulle est compltement dcale
et vient en bute sur un des deux cots du tore. La nivelle doit tre rgle au moyen des
vis de rglage prvues cet effet (voir 2.3).
c) Si la nivelle torique est lgrement drgle, elle se dcale d'un nombre n de
graduations : il suffit dans ce cas de recentrer la bulle de n/2 graduations (fig. 3.4 : deux
graduations vers la gauche car n = 4) et adopter pour la suite cette position de la bulle
comme position de rfrence appele position de calage.
En effet, il doit y avoir un angle droit, 100 gon, entre l'axe de la nivelle torique (t ) et l'axe
principal du thodolite (P). En cas de drglement de la nivelle, cet angle droit prsente
un dfaut .
Fig. 3.4. : Contrle de la nivelle torique
Fig. 3.5. : Doublement de lerreur par demi-tour de lalidade
Topographie et topomtrie - S. Milles, J. Lagofun
90 MESURES ANGULAIRES
La nivelle tant centre en position 1, aprs un demi-tour elle passe en position 2 avec un
dcalage de la bulle de n graduations correspondant deux fois l'angle (fig. 3.5). En
recentrant la bulle de la moiti de l'erreur (n/2 graduations), l'axe de l'appareil est remis
parfaitement vertical, l'axe de la nivelle torique restant dcal du mme angle par
rapport l'horizontale. La bulle de la nivelle n'est pas centre (dcale de n/2 gradua-
tions) mais l'axe de l'appareil est vertical : cest la position de calage. Il reste caler la
bulle dans la mme position dans toutes les directions.
2.1.5 6aIaga dans IouIas Ias dIrarIIons au moyan
da Ia nIvaIIa IorIqua
Pour effectuer un calage fin au moyen de la
nivelle torique, procdez comme suit :
G Amenez l'axe de la nivelle torique sur la
troisime vis calante V3 et, en agissant
sur la seule vis V3, amenez la bulle dans
la position de calage (c'est--dire bulle
centre si vous tiez dans le cas a) du
paragraphe 2.1.4. ou bulle dcale de la
moiti de l'erreur dans le mme sens si
vous tiez dans le cas c) du paragraphe
2.1.4). Sur la figure 3.6., la nivelle est
dans la position de calage de lexemple
prcdent (dcalage de deux graduations
vers la droite repre sur les schmas par
la lettre t ).
G Vrifiez enfin qu'en tournant l'appareil dans une direction intermdiaire la bulle reste
dans sa position de calage. Si le calage n'est pas parfait, il faut reprendre les mmes
oprations pour affiner le calage.
G vitez ensuite tout mouvement brusque de lalidade et, lors du pivotement de celui-
ci, pensez utiliser les deux mains, une sur chaque montant de lalidade pour rpartir
le moment du couple appliqu lappareil.
2.1.6 VrIIIraIIons IInaIas
Enfin, vrifiez que l'appareil est toujours au-dessus
du point de station donn (on saccorde une tol-
rance de centrage de 4 mm, ce qui correspond au
rayon de 4 mm de la demi-sphre intrieure des
clous darpentage, fig. 3.7). Sur les clous de fabrica-
tion allemande, il est mentionn messpunkt qui
signifie littralement point de mesure.
Fig. 3.6. : Calage final sur la 3
e
vis
Fig. 3.7. : Clou darpentage
Topographie et topomtrie - S. Milles, J. Lagofun
MESURES ANGULAIRES 91
Si lappareil sest trop loign (ce qui nest possible que si vous avez fait une faute lors
de la mise en station), dcalez-le en dvissant l'embase et en le faisant glisser sur le
plateau du trpied, puis reprenez le rglage depuis le dbut.
Cette dernire manipulation est nanmoins dconseille car lappareil peut tre trop
excentr par rapport au plateau et venir en porte--faux ; de plus, la marge de manuvre
est faible et il faut de toute faon reprendre le calage de la nivelle torique.
Remarque
cet instant, vrifiez que la nivelle sphrique est bien rgle. Elle doit tre parfaite-
ment centre. Si ce n'est pas le cas, tournez les vis de rglage pour la centrer parfaite-
ment (voir 2.3.1).
2.1.7 gIagas avanI masuras
Rglez la nettet du rticule (croix de vise dans loptique) : pour le faire de manire
prcise, rglez la lunette linfini puis rendez les fils du rticule les plus nets possible en
agissant sur la vis de rglage. Ce rglage permet de placer exactement le rticule dans le
plan de formation de limage virtuelle ; ainsi, lil de loprateur na pas besoin
daccommoder et se fatiguera moins. Si ce rglage nest pas satisfaisant, il est possible
de sen apercevoir en balanant lgrement la tte devant loculaire : le rticule semble
bouger par rapport lobjet vis alors quil devrait rester fixe (on dit quil y a de la
parallaxe). Ensuite, ne touchez plus au rticule et rglez la nettet de la lunette sur
llment vis. Dployez enfin les ventuels miroirs pour lclairage des cercles. Lobser-
vation monoculaire doit se faire les deux yeux ouverts.
Vrifiez que l'appareil est dans sa position de rfrence. Gnralement, le cercle vertical
doit se situer gauche de lobservateur. Pour les stations lectroniques, il est souvent
droite. Cette vrification se fait en positionnant la lunette approximativement lhorizon-
tale et en lisant langle vertical qui doit tre proche de 100 gon. Si la lecture indique une
valeur proche de 300 gon, faites un double retournement, cest--dire le demi-tour de la
lunette et de lalidade pour vous retrouver dans la position de rfrence. Positionnez
ventuellement le zro du limbe sur la rfrence choisie.
2.2 0aractrIstIg0es 4es aIveIIes
2.2.1 FrInrIpa da IonrIIonnamanI d'una nIvaIIa
Une nivelle est un petit rcipient de cristal appel aussi fiole. Elle est remplie dun
mlange dalcool et dther dans lequel subsiste une bulle de vapeur.
Dans une nivelle sphrique, la face suprieure du verre retenant la bulle est une calotte
sphrique (fig. 3.8-a). Une nivelle torique est un fragment de tore (fig. 3.8-b). Les rayons
de courbure sont grands (de lordre du mtre pour les nivelles sphriques et de 10 100
mtres pour les nivelles toriques), donc imperceptible lil. Ces considrations justi-
Topographie et topomtrie - S. Milles, J. Lagofun
92 MESURES ANGULAIRES
fient que la nivelle sphrique soit une nivelle dapproche dont le calage est multidirec-
tionnel, alors que la nivelle torique, qui est unidirectionnelle, sert au calage fin. La
directrice dune nivelle torique est la droite tangente sa face suprieure et situe dans
le plan vertical de son axe.
Remarque
Le frottement qui empche parfois la bulle datteindre sa position dquilibre est appel
erreur de paresse et peut atteindre le dixime de la sensibilit de la nivelle (voir
dfinition de la sensibilit ci-aprs).
a) Pour ses appareils, un constructeur fournit les sensibilits suivantes des nivelles (on
donne en gnral la variation angulaire correspondant au dplacement dune gradua-
tion 2 mm de la bulle ; voir tableau paragraphe 1.3.).
G Nivelle sphrique : 8/2 mm (8 minutes sexagsimales (15 cgon) pour 2 mm) ;
G Nivelle torique : 20/2 mm (20 secondes sexagsimales (6,2 mgon) pour 2 mm).
Calculez le rayon de courbure R de chaque nivelle.
b) Calculez lerreur de point provoque 100 m par une nivelle sphrique mal cale
(dcalage de lordre du millimtre).
a) Nivelle sphrique : R = 0,002 / (8 / 60 * / 180) = 0,9 m
Nivelle torique : R = 0,002 / (20 / 3600 * / 180) = 20,6 m
b) = 4 soit 7 cgon, ce qui provoque une erreur de point de 11 cm 100 m !
Fig. 3.8-a. Nivelle sphrique Fig. 3.8-b. : Nivelle torique
Application
Rponse
Topographie et topomtrie - S. Milles, J. Lagofun
MESURES ANGULAIRES 93
2.2.2 hIvaIIa d'Indax varIIraI
Sur certains appareils (comme le tachomtre dia-
gramme Wild RDS), lindex du cercle vertical est
asservi une nivelle dindex qui permet un calage prcis
de sa verticalit ( faire avant chaque vise). Ce calage
utilise une bulle quun systme de prismes dcoupe en
deux parties : la nivelle est correctement cale lorsque les
deux parties concident (fig. 3.9)
1
. La prcision de calage
dune bulle coupe est de lordre de 0,2 mm alors que
pour un autre systme elle est de lordre de 0,5 mm.
Sur les appareils les plus rcents (T16, T2), la correction dindex est effectue de faon
automatique grce un systme de compensateur pendule (utilisant laction de la
pesanteur) dont le principe est quivalent celui du compensateur des niveaux
automatiques
2
. Ce systme permet dobtenir un calage trs prcis de la verticalit de
lindex, condition que la mise en station du thodolite place au pralable le compensa-
teur dans une plage maximale appele dbattement. Par exemple, pour un T16, la
prcision du calage donne par le constructeur est de 1 ( 0,3 mgon) dans une plage
de dbattement de lindex vertical de 5 ( 9 cgon) (voir tableau paragraphe 1.3.).
2.3 8Iaes 4'0a tho4oIIte
2.3.1 gIaga du pIomb opIIqua
Le principe de rglage du plomb optique est le
mme que celui de la nivelle torique : lors
dune rotation de 200 gon de lalidade, un
plomb optique bien rgl revient exactement
sur le point de station, un plomb optique
drgl se dcale de ce point dune valeur cor-
respondant au double du dfaut de rglage.
Pour le rgler, procdez ainsi :
G Marquez sur une feuille de papier fixe au
sol (ou sur une planchette en bois) un point
(P0, fig. 3.10.) qui sera le point o vous
devez stationner le thodolite laide des
vis calantes exactement sur ce point sans
soccuper des nivelles.
1
Se reporter au schma de principe, chapitre 5 sur le nivellement, paragraphe 3.1.
2
Se reporter au chapitre 5 sur le nivellement, paragraphe 1.2.3.
Fig. 3.9. : Bulle coupe
Fig. 3.10. : Rglage du plomb optique
Topographie et topomtrie - S. Milles, J. Lagofun
94 MESURES ANGULAIRES
G Faites un demi-tour de lalidade et marquez sur la feuille le nouveau point P1 point
par le plomb optique : si celui-ci est trop loign (plus de 2 mm) du point de station
initial P0, placez sur le papier le point P2 au milieu de la droite P0-P1 et utilisez les
vis calantes pour positionner le plomb optique exactement sur P2 ; ainsi la moiti de
lerreur est rattrape. Utilisez ensuite les vis de rglage du plomb optique pour
positionner le plomb exactement sur le point P0 et rattrapez ainsi la seconde moiti
de lerreur. Vrifiez en reprenant toute la manipulation que le plomb est bien rgl.
Remarque
Le rglage prcdent nest possible que si le plomb optique est situ sur lappareil. Sil
est situ sur lembase, il faudra utiliser un fil plomb (principe plus simple mais
manipulation plus dlicate).
2.3.2 gIaga da Ia nIvaIIa IorIqua
La mise en vidence dun besoin de rglage a
t traite au paragraphe 2.1.4.
Le dcalage de la nivelle tant de n gradua-
tions, ramenez la bulle de la nivelle torique
vers la position centrale de n/2 graduations au
moyen de la vis de rglage. Une seule vis
suffit et elle est gnralement situe vers
lune des deux extrmits de la nivelle quelle
fait pivoter autour dune axe horizontal
(fig. 3.11). Aprs avoir ralis ce rglage,
recommencez la manipulation aborde au
paragraphe 2.1.4. jusqu la disparition du
dfaut.
2.3.3 gIaga da Ia nIvaIIa sphrIqua
Aprs mise en station de lappareil et
calage de la nivelle torique, vrifiez le
rglage de la nivelle sphrique en utilisant la
nivelle torique, plus prcise puisquayant un
grand rayon de courbure. Recentrez alors la
nivelle sphrique au moyen de ses vis de
rglage, gnralement au nombre de deux,
situes en dessous ou sur les cts de la
nivelle (fig. 3.12).
Fig. 3.11. : Rglage de la nivelle torique
Fig. 3.12. : Rglage
de la nivelle sphrique
Topographie et topomtrie - S. Milles, J. Lagofun
MESURES ANGULAIRES 95
2.3.4 gIaga da I'axa opIIqua
Ce rglage permet de mesurer et dliminer la collimation horizontale (voir 3) dans le
cas o elle est trop importante, par exemple lorsque le dfaut de perpendicularit est de
lordre de 10 fois lcart type de lappareil utilis, soit 1 cgon pour un T16 et 2,5 mgon
pour un T2. Cette erreur est normalement limine par le double retournement.
Stationnez le thodolite au moins 50 m dune surface verticale (mur de btiment).
Pointez un repre A (fig. 3.13.) loign et situ loppos du mur (par exemple un jalon).
Lappareil est en position de rfrence en cercle gauche sur la figure 3.13. La lunette doit
tre peu prs horizontale (angle vertical proche de 100 gon). Placez le zro de la
graduation horizontale sur ce repre.
Basculez la lunette autour de laxe des tourillons puis tracez sur le mur la position
indique par le rticule de la lunette (par exemple, sur une feuille de papier fixe au mur).
Si un dfaut de perpendicularit c existe, laxe optique pointe le point C et la distance BC
correspondrait donc un angle 2c double de lerreur de collimation.
La distance BC ne pouvant tre mesure (point B inconnu), effectuez un double retour-
nement de la lunette (cest--dire un pivotement de lalidade de 200 gon puis un bascu-
lement de la lunette autour de laxe des tourillons) et tracez la nouvelle position du
rticule sur le mur. Cette position donne le point D tel que CD corresponde au quadruple
de lerreur c. On mesure enfin CD et SB (B au milieu de CD).
On peut alors calculer c par :
Fig. 3.13. : Contrle et rglage de la collimation horizontale
2 2c ( ) tan
CD
SB
-------- =
Topographie et topomtrie - S. Milles, J. Lagofun
96 MESURES ANGULAIRES
Si cette collimation c est trop importante, rglez la ligne de vise dfinie par le centre
optique de la lunette et la croise des fils du rticule : agissez sur les vis de rglage du
rticule pour amener la vise du quart de lerreur du point D vers le point C : sur Wild
T16, il faut agir sur deux vis diamtralement opposes, situes de part et dautre de
loculaire de vise (agir sur chaque vis de la mme quantit et en sens oppos lune de
lautre).
Remarque
Cette erreur de collimation horizontale c induit une erreur sur une lecture angulaire
horizontale telle que :
(voir justification 3.1.4)
Dans cette expression i est langle de site (voir dfinition 7.1) ; il vaut 0 lorsque la
lunette est horizontale. Cest pourquoi la manipulation prcdente doit tre ralise
lorsque la lunette est approximativement horizontale : cela permet de mesurer
directement c puisque cos i 1.
2.3.5 gIaga du vIsaur d'approrha
Le viseur dapproche permet de pointer rapidement dans une direction proche de lobjet
viser. Il doit tre situ au-dessus de la lunette en position de rfrence. Son rglage
est simple : pointez un point directement avec la lunette puis rglez le viseur dapproche
au moyen de ses vis de rglage afin quil soit exactement sur le mme point vis.
2.4 lect0res aa0IaIres
Les caractristiques optiques de la lunette sont dtailles au chapitre 5 sur les niveaux,
paragraphe 1.2.4.
2.4.1 IIruIas da poInI
On distingue quatre types principaux de
points (fig. 3.14) :
G Le point ordinaire ou par contact.
G Le point par bissection : le fil vertical du
rticule passe par laxe de lobjet point.
G Le point par encadrement : lobjet
point est encadr par deux fils parallles
du rticule.
G Le point par concidence : le fil vertical
du rticule tend se confondre avec
lobjet point.
sin
c sin
i cos
---------- =
Fig. 3.14. : Diffrents types de point
Topographie et topomtrie - S. Milles, J. Lagofun
MESURES ANGULAIRES 97
La prcision du point dpend de la forme de lobjet vis, du type de rticule mais aussi
du grossissement de la lunette et des conditions de luminosit.
Pour une lunette de grossissement G, on admet les ordres de grandeurs ci-dessous des
prcisions de point :
2.4.2 LarIuras sur varnIars
Sur les appareils optico-mcaniques, la lecture seffectue sur un vernier gradu comme
sur la figure 3.15 : gauche T16 (angles horizontal Hz et vertical V), droite T2 (angle
vertical). La lecture de ces verniers se fait ainsi : les chiffres avant la virgule dfilent
devant la graduation fixe du vernier, les chiffres aprs la virgule se lisent lendroit ou
une graduation mobile intercepte le secteur gradu.
Par exemple, dans le thodolite T16, les deux cercles sont lisibles en mme temps ; on
peut lire : V = 95,98
5
gon et Hz = 17,96
5
gon.
La dernire dcimale (mgon) est apprcie par loprateur.
Dans le thodolite T2, un seul cercle est visible la fois (un bouton permet de basculer
du cercle horizontal vers le cercle vertical. Voir 1.3. bouton n 12). La lecture est aussi
diffrente : grce une molette supplmentaire pilotant un micromtre optique, lopra-
teur fait concider les traits du rectangle suprieur (dans la figure 3.15, ils ne sont pas tout
fait concidants afin dtayer cette explication). Ceci ramne le chiffre mobile du
rectangle central en face dune graduation : loprateur lit 96,1 gon.
o|nt rc|s|on (dmgon) 0rdre de grondeur pour / = 30
0rd|no|re 100// 3,5 dmqoe, so|| 3,5 mm =0 m
8|ssect|on 0// 2 dmqoe, so|| 2 mm =0 m
Lncodrement 50// 1,5 dmqoe, so|| 1,5 mm =0 m
0onc|dence 25// 1 dmqoe, so|| 1 mm =0 m
Fig. 3.15. : Lecture sur verniers gradus du T16 et du T2
Topographie et topomtrie - S. Milles, J. Lagofun
98 MESURES ANGULAIRES
Loprateur lit enfin les dcimales suivantes dans le rectangle infrieur, soit 96,1262 gon
(loprateur peut apprcier jusqu 10
5
gon mais il arrondira au dcimilligrade le plus
proche car on atteint les limites de prcision de lappareil).
Ce systme de traits mobiles a pour origine le mesurage dit par double vernier qui
permet de lire sur deux parties diamtralement opposes des cercles afin dannuler le
dfaut dexcentricit rsiduel (voir 3) des cercles. La mise en concidence des traits du
micromtre est en fait une mise en concidence des graduations de deux parties diam-
tralement opposes du limbe, ce qui permet de faire une moyenne optique de deux
valeurs. Finalement, aprs avoir fait concider les traits mobiles du rectangle suprieur,
loprateur lit V = 96,1262 gon.
3 F80I8I08 08 M8088 k860lkI88
Les dfinitions des diffrents types derreurs sont donnes au tome 2, chapitre 5, para-
graphe 12.
3.1 rre0rs systmatIg0es 40es 0a 4fa0t 4e I'aareII
3.1.1 raduaIIon aI gomIrIa das rarrIas
Lirrgularit des graduations des cercles et le dfaut de perpendicularit du cercle
horizontal avec laxe principal sont minimiss par la ritration des lectures effec-
tues, cest--dire plusieurs lectures du mme angle sur des parties diffrentes de la
graduation, dcales de 100 gon (voir 4.3.3).
3.1.2 IauIs d'axranIrIrII
Concernant le dfaut dexcentricit de laxe principal, laxe principal ne passe pas par
le centre du cercle horizontal.
Concernant le dfaut dexcentricit de laxe secondaire, laxe secondaire ne passe pas
par le centre du cercle vertical.
Les appareils les plus prcis sont munis dun systme permettant dliminer ces dfauts
dexcentricit (lecture dite par double vernier et de lire sur deux parties diamtrale-
ment opposes du cercle et den faire une moyenne optique. Ce systme est utilis dans
le micromtre du thodolite T2 (voir 2.4.2).
La figure 3.16 permet dexpliquer la lecture par double vernier :
Topographie et topomtrie - S. Milles, J. Lagofun
MESURES ANGULAIRES 99
Le point O, point de passage de laxe
de rotation (axe P ou T) dans le plan
du cercle, est diffrent du centre du
cercle : il existe une excentricit e.
Loprateur lit donc langle ( + )
sur un point P quelconque alors quil
dsire lire langle . Sil fait une lec-
ture simultane sur la partie du cercle
diamtralement oppose par rapport
O, il lit langle (200 + ) ; la
moyenne des deux valeurs (lune
diminue de 200) permet dobtenir
langle exact.
Dans le triangle OOP, lerreur
dexcentricit est telle que :
R est le rayon du cercle (pour R 2,5 cm, une excentricit de e = 0,001 mm provoque au
maximum une erreur angulaire de = 25 dmgon pour = 100 gon).
3.1.3 TourIIIonnamanI
Laxe secondaire (T) nest pas perpendiculaire laxe principal (P) (fig. 3.17). Le dfaut
de tourillonnement t entrane un dplacement de laxe de vise OP dans un plan Oxz non
vertical inclin de langle t.
Ceci implique une erreur sur langle
horizontal et une erreur sur langle
de site i. Langle lu est i et langle
cherch i.
Le calcul de lerreur seffectue
comme suit :
hh = Oh . tan = nh . sint
nh = Oh . tani
Donc : tan = sint . tani
Lerreur sur langle de site i est cal-
cule ainsi :
nh = On . sini = nh . cost
nh = On . sini donc sini = sini . cost
Ce dfaut est aussi appel collimation
verticale.
Fig. 3.16. : Lecture par double vernier
sin
e
----------
sin
R
----------- =
Fig. 3.17. : Dfaut de tourbillonnement
Topographie et topomtrie - S. Milles, J. Lagofun
100 MESURES ANGULAIRES
Lerreur est limin par double retournement (voir 4.2) : en effet, aprs avoir
effectu cette manipulation, le plan inclin de dplacement de la lunette occupe une
position symtrique par rapport au plan vertical comprenant la ligne de vise OP, et
lerreur commise est aussi symtrique ; la moyenne des deux lectures limine ce
dfaut.
Le dfaut sur i nest limin par aucune manipulation. Il est ngligeable pour des angles
de site courants : en effet, mme avec un angle de site extrme (i = 50 gon), il faudrait un
dfaut t = 0,1 gon (trs important) pour obtenir une erreur ngligeable de 1 dmgon sur i.
3.1.4 6oIIImaIIon horItonIaIa
La collimation horizontale est note c.
Laxe de vise OP (fig. 3.18) nest pas
perpendiculaire laxe secondaire (T).
Ce dfaut de perpendicularit c induit
une erreur sur langle horizontal.
Langle i nest pas affect par cette
erreur : la projection de i sur le plan ver-
tical xOz reste inchange.
La ligne de vise dcrit un cne daxe
(T) et dangle au sommet (200 2c). Les
angles horizontaux et verticaux sont lus
dans le plan vertical OPh alors quils
devraient tre lus dans le plan vertical
Oxz.
Le calcul de lerreur seffectue comme
suit :
Oh = OM . cosi = ON . cosi
Oh = ON . sinc = Oh . sin Donc .
Ce dfaut est limin par le double retournement pour les mme raisons que la colli-
mation verticale (voir 3.1.3). On remarque que pour une vise horizontale sinc = sin,
puisque i = 0, et que lerreur due au dfaut de tourillonnement est nulle puisque
tani = 0 ; cest donc un procd pour mettre en vidence lerreur de collimation horizon-
tale.
3.1.5 Lrraur d'Indax da rarrIa varIIraI
Lindex du cercle vertical nest pas situ sur la verticale du centre du cercle. Cette erreur
peut tre limine par double retournement ou par lutilisation dune nivelle dindex. Sur
les appareils rcents, un automatisme utilisant laction de la pesanteur minimise ce dfaut
(voir 7.3 et 2.2.2).
Fig. 3.18. : Collimation horizontale
sin
c sin
i cos
---------- =
Topographie et topomtrie - S. Milles, J. Lagofun
MESURES ANGULAIRES 101
3.1.6 Lrraur d'axranIrIrII du vIsaur
Laxe de vise ne coupe pas laxe principal ou laxe secondaire. Cette erreur est limine
par double retournement.
3.1.7 1aux da IonrIIonnamanI
La variation de la position des axes de rotation (P) et (T) est due la prsence obligatoire
de jeux de fonctionnement dans les mcanismes de guidage en rotation. Cette erreur
peut tre minimise par linversion du sens de rotation lors des mesures par paire de
squence (voir 4.3.3). Cette inversion provoque un changement de sens du rattrapage
de jeux. Il faut galement veiller ne pas entraner brusquement un lment en rotation
et toujours effectuer les rotations en manipulant lalidade de manire symtrique (avec
les deux mains en mme temps).
3.2 rre0rs systmatIg0es 40es 0ae ca0se extrIe0re
Il s'agit essentiellement des erreurs dues la rfraction atmosphrique qui incurve le
trajet de tout rayon lumineux (voir au chapitre 6 les paragraphes 5.2. et 5.3.). Les
rfractions sont de deux types :
G rfraction latrale : elle est due la prsence dune paroi expose au soleil. Elle est
impossible valuer ;
G rfraction verticale : elle est due aux variations de densit de latmosphre, elle peut
tre value et corrige.
Il faut viter les vises rasantes prs dobstacles importants, au-dessus dun cours deau,
trop prs du sol par temps chaud cause du flamboiement
1
de lair.
3.3 rre0rs accI4eateIIes
3.3.1 Lrraur da raIaga da I'axa prInrIpaI
Le calage parfait de laxe principal est trs difficile raliser : il nest jamais parfaitement
vertical. Ceci entrane un dfaut dhorizontalit t de laxe secondaire, dfaut qui res-
semble un dfaut de tourillonnement, entranant sur langle horizontal une erreur
dans la mesure des angles horizontaux de la forme : sin = sint . tani , comme pour le
tourillonnement.
Lincidence de cette erreur sur les angles horizontaux ne peut pas tre limine par des
mthodes de mesure. En revanche, elle peut tre mesure, pour les manipulations de
1
Le flamboiement est le tremblement de limage vue dans la lunette, d aux effluves de latmosphre
provoques par des couches dair tempratures diffrentes.
Topographie et topomtrie - S. Milles, J. Lagofun
102 MESURES ANGULAIRES
haute prcision, au moyen dune nivelle cavalire : il sagit dune nivelle que loprateur
pose sur les montants de lalidade et qui permet dobtenir langle dinclinaison de laxe
secondaire. Cela permet de souligner limportance de la mise en station et du rglage
de la nivelle torique.
Remarque
Sur certains thodolites lectroniques (T2000, T3000), les valeurs de la plupart de ces
erreurs sont mesures par lappareil chaque station et prises en compte dans laffi-
chage. Cette nouvelle technologie rvolutionne la conception des appareils qui
saffranchissent mieux de leurs dfauts de fabrication en les mesurant plutt quen
essayant de les minimiser la construction. Elle change galement les mthodes de
mesure : le double retournement devient superflu, sauf pour un contrle des lectures.
3.3.2 Lrraur da ranIraga sur Ia poInI sIaIIonn
Il est de lordre de 4 mm pour le mode de mise en station tudi au paragraphe 2.1.
3.3.3 Lrraur da poInI
Reportez-vous au paragraphe 2.4.1. concernant les diffrents types de points.
3.3.4 Lrraurs da IarIura
Pour viter ce type derreur, il faut soigner la lecture sur vernier et effectuer des doubles
lectures. Les appareils lectroniques affichage digital limitent les erreurs de lecture et
les erreurs de retranscription (en particulier s'ils sont munis dune interface informa-
tique).
3.3.5 Lrraur da drIva du tro
Cette erreur est due la torsion du trpied : les trpieds en bois (ou en mtal) tant peu
massifs (pour faciliter leur transport) et relativement peu rigides, il existe des phno-
mnes de torsion du trpied dus aux passages et aux manipulations de loprateur, aux
dilatations diffrentielles des pieds sous l'effet du soleil, etc. Ces phnomnes entranent
une drive du zro qui peut affecter des mesures de trs grande prcision (dmgon). Pour
les minimiser, il est donc recommand :
G de rester en station le moins longtemps possible sur un point ;
G deffectuer les observations lombre dun parasol ;
G ou bien dutiliser comme en mtrologie (chap. 7 6) des trpieds trs massifs et
stables.
En mesurage de prcision, il est possible de contrler cette drive en pointant rgulire-
ment un signal fixe (ou mire de torsion) et en tenant compte de lvolution des lectures.
Topographie et topomtrie - S. Milles, J. Lagofun
MESURES ANGULAIRES 103
3.3.6 pIaramanI arrIdanIaI da I'apparaII
Cest par exemple un dplacement d un choc sur un pied. Le contrle seffectue en
refermant chaque srie de lectures angulaires sur le point de dpart (fermeture dun tour
dhorizon, paragraphe 4.3.4.). Cette manipulation permet aussi de contrler la drive du
zro traite au paragraphe 3.3.5.
4 l8 k86l8 h08IL08Ik0I
4.1 le cercIe horItoataI
Le cercle horizontal (ou limbe) est la graduation du thodolite sur laquelle l'oprateur lit
les angles horizontaux. Il est li au socle de l'appareil mais peut aussi pivoter sur lui-
mme de manire rgler le zro des graduations sur une direction donne. Il existe
plusieurs technologies possibles pour cette mise zro : le dbrayage de lentranement
du cercle (T16) ou bien le mouvement par vis-crou (T2).
Les graduations sont croissantes de 0 400 gon dans le sens horaire (en regardant le
cercle du dessus, fig. 3.19).
Fig. 3.19. : Mesure dangles horizontaux
Topographie et topomtrie - S. Milles, J. Lagofun
104 MESURES ANGULAIRES
Aprs la mise en station du thodolite, ce cercle est horizontal, ce qui explique que les
angles lus soient des angles projets sur le plan horizontal et appels angles horizontaux
(ou azimutaux), nots Hz.
Sur la figure 3.19, l'appareil est en station sur le point S. L'oprateur vise le point A
(sommet du btiment) et rgle le zro des graduations sur ce point. En visant le point B,
il lit dans le thodolite l'angle horizontal A - S - B (A, B, S sont les projections de A,
B et S sur le plan horizontal passant par laxe des tourillons de lappareil).
4.2 le 4o0hIe reto0raemeat
Cest une manipulation consistant en un demi-tour simultan de la lunette et de
lalidade (fig. 3.20). Cette technique de mesure permet d'liminer certaines erreurs
systmatiques (voir 3) et de limiter les fautes de lecture. Lors dune mesure dangle
horizontal, cela permet :
G de doubler les lectures et donc de diminuer le risque de faute de lecture ;
G de ne pas toujours lire sur la mme zone du limbe, donc de limiter lerreur due aux
dfauts de graduation du limbe ;
G dliminer les dfauts de collimation horizontale et de tourillonnement.
Lerreur de centrage sur le point de station et lerreur de calage de laxe vertical ne sont
pas limines par cette manipulation. Il convient donc de soigner ces oprations.
Pratiquement, on effectue :
G une lecture en cercle gauche (cercle vertical de l'appareil gauche de l'oprateur, plus
gnralement en position de rfrence) ;
G un double retournement ;
G une nouvelle lecture du mme angle en cercle droite (cercle vertical droite).
Fig. 3.20. : Double retournement
Topographie et topomtrie - S. Milles, J. Lagofun
MESURES ANGULAIRES 105
Si lon appelle Hz
CG
la valeur lue en cercle gauche, et Hz
CD
celle lue en cercle droit, on
doit observer :
En effet, le double retournement dcale le zro de la graduation de 200 gon (fig. 3.20) ;
ceci permet un contrle simple et immdiat des lectures sur le terrain.
La diffrence entre les valeurs Hz
CG
et (Hz
CD
200) reprsente la combinaison des
erreurs de collimation, de mise en station, de lecture, etc.
L'angle horizontal Hz mesur vaut alors :
Remarque
Si lon n'effectue qu'une seule lecture, elle doit tre faite en position de rfrence (CG
sur les thodolites classiques et CD sur la plupart des stations lectroniques).
4.3 IermIaoIoIe 4es mes0res 4'aaIes horItoata0x
4.3.1 LarIura sImpIa
L'appareil tant dans sa position de rfrence (par
exemple CG sur la figure 3.21), et le zro de la gradua-
tion horizontale n'tant pas modifi aprs mise en sta-
tion, l'oprateur effectue une lecture azimutale L
A
sur
le point A puis une lecture L
B
sur B et en dduit l'angle
ASB :
4.3.2 8quanra
On appelle squence un ensemble de (n + 1) lectures
effectues partir d'une mme station sur n directions
diffrentes avec la mme position des cercles horizon-
taux et verticaux, le contrle de fermeture sur la rfrence et la rpercussion sur les n
lectures de l'cart de fermeture sur la rfrence (sur laquelle on rduira les angles zro).
si Hz
CD
> 200 gon
si Hz
CD
< 200 gon
Hz
CD
Hz
CG
200 +
Hz
Hz
CG
Hz
CD
200 ( ) +
2
--------------------------------------------------- =
Hz
Hz
CG
Hz
CD
200 400 + ( ) +
2
-------------------------------------------------------------------
Hz
CG
Hz
CD
200 + ( ) +
2
---------------------------------------------------- = =
Fig. 3.21. : Lecture
dun angle horizontal
Hz
AB
L
B
L
A
=
Topographie et topomtrie - S. Milles, J. Lagofun
106 MESURES ANGULAIRES
Par exemple, sur la figure 3.22, la rfrence est le point
R sur lequel loprateur effectue la premire lecture
L
R1
, on fait une lecture sur chaque point en tournant
en sens horaire et une dernire lecture de fermeture
sur le point R L
R2
.
Par calcul, les lectures sont ensuite rduites
1
la rf-
rence R en soustrayant aux autres lectures la moyenne
des deux lectures sur la rfrence. Pour cela, on
calcule :
G la fermeture de la squence : Fs = | L
R1
L
R2
|
G la moyenne sur la rfrence : L
R
= (L
R1
+ L
R2
)/ 2
G la lecture sur chaque point : Lj = Lj L
R
La lecture sur la rfrence devient donc L
R
= 0 (voir lexemple du paragraphe 4.4.1.).
La fermeture angulaire de chaque squence est soumise des tolrances rglementaires
dont les valeurs fixes par larrt de janvier 1980 (voir la bibliographie) correspondent
: 1,5 mgon en canevas de prcision et 2,8 mgon en canevas ordinaire.
4.3.3 FaIra da squanras
Une paire de squence est l'association de deux squences successives avec un dcalage
de l'origine du limbe, le retournement de la lunette et linversion du sens d'observa-
tion. Cette mthode permet de minimiser certaines erreurs systmatiques (voir 3).
Gnralement, loprateur effectue une squence en CG dans le sens horaire de rotation
de l'appareil puis effectue un double retournement et enfin effectue la squence en CD
dans le sens trigonomtrique (sens inverse horaire).
Pour une seule paire de squences on dcale l'origine du limbe de 100 gon ; le double
retournement dcale dj l'origine du limbe de 200 gon (fig. 3.23).
1
Rduire les lectures la rfrence revient affecter la rfrence la lecture zro.
Fig. 3.22. : Squence
Fig. 3.23. : Paire de squences
Topographie et topomtrie - S. Milles, J. Lagofun
MESURES ANGULAIRES 107
Remarque
G Si loprateur effectue deux paires de squences les dcalages d'origine sont gn-
ralement effectus comme indiqu ci-dessus.
G les lectures en canevas ordinaire ncessitent au moins deux paires de squences, en
canevas de prcision au moins quatre paires de squences (dcalages usuels dori-
gine pour quatre paires : 0, 100 ; 50,150 ; 25,125 ; 75,175 (voir lexemple donn au
paragraphe 4.4.2.).
G le procd consistant dcaler lorigine du limbe entre deux squences est appel
ritration (nous ne dtaillons pas le procd de rptition qui nest plus employ :
il consistait lire plusieurs fois langle cherch et lajouter sur le cercle hori-
zontal).
G lcart des lectures (cart entre la moyenne de toutes les paires et la moyenne dune
paire) est soumis des tolrances rglementaires :
1,2 mgon en canevas de prcision pour quatre paires de squences (1,3 mgon pour
huit paires) ;
1,3 mgon en canevas ordinaire pour deux paires de squences (1,6 mgon pour
quatre paires).
4.3.4 Tour d'horIton
Le tour dhorizon est le rsultat final de la combinaison des observations angulaires
(squences) en une mme station et rapportes une mme rfrence (dans nos exem-
ples le point R).
Lors du calcul, on dtermine la valeur moyenne de lcart sur la rfrence : cest la
somme algbrique de tous les carts de lecture dune mme paire divise par (n + 1), n
tant le nombre de directions vises y compris la rfrence.
Cet cart est soumis des tolrances rglementaires :
G 0,7 mgon en canevas de prcision pour quatre paires (0,8 mgon pour huit paires) ;
G 0,8 mgon en canevas ordinaire pour deux paires (0,9 mgon pour quatre paires).
o|re 0r|g|ne Sens de rotot|on os|t|on du cerc|e vert|co|
n1
0 sces |oo|c CGoec|c
100 sces ||qo Cuo||c
n2
50 sces |oo|c CGoec|c
150 sces ||qo Cuo||c
Topographie et topomtrie - S. Milles, J. Lagofun
108 MESURES ANGULAIRES
4.3.5 FaIra da squanras rduIIa
Cest une paire de squences sans fermeture et sans dcalage du limbe. On lutilise en
lever de dtails ou pour la mesure dangles uniques, par exemple en polygonation
ordinaire.
G Arriv en D, on effectue un double retournement et on inverse le sens de rotation.
G Lcart entre CG + 200 et CD doit rester constant ( 1 graduation ).
G On prend la moyenne des deux lectures base sur CG.
4.4 kIIcatIoas
4.4.1 Masura d'una surIara
Pour mesurer la surface (projete
lhorizontale) dlimite par le poly-
gone ABCDE ci-contre (fig. 3.24), on
effectue les oprations suivantes avec
un goniomtre au mgon, une chane de
50 m, un niveau de chantier et une
mire.
G Mise en station en S et calage de
l'origine du limbe prs du point de
rfrence A.
G Tour dhorizon avec une seule paire
de squences sur les cinq sommets
(rfrence : point A).
G Mesure la chane des distances inclines de la station aux cinq sommets (le sol tant
en pente rgulire).
G Lecture des dniveles entre la station et les sommets pour le calcul des distances
horizontales.
Le tableau ci-aprs rcapitule les lectures. Eu gard la faible longueur des vises et la
prcision de lappareil utilis, les corrections de dv (chapitre 2 3.4.3.2) et les correc-
tions dues la projection sont ngliges.
Stot|on o|nts
Lecture 00
(gon)
Lecture 0D
(gon)
Moyenne
1 A 11=,75 31=,71 11=,73
3 207,23 7,28 207,23
C 373,= 173,0 373,2
u 8,19 28,1= 8,1
Fig. 3.24. : Mesure dune surface horizontale
Topographie et topomtrie - S. Milles, J. Lagofun
MESURES ANGULAIRES 129
Remarquez que la valeur du G0moyen de station ne correspond plus au gisement du zro
du limbe tel quil tait rellement en station au point 50. Lopration de rduction des
lectures du tour dhorizon au point 80 a dcal artificiellement la position du zro du
limbe. Sa valeur de terrain serait : 61,9605 8,8086 = 53,1519 gon.
6.8.4 6aIruI das poInIs nouvaaux
Aprs la dtermination du G0moyen de station, on peut calculer des points nouveaux
partir de la connaissance de la distance rduite et de la lecture angulaire sur chacun de
ces points nouveaux. Les lectures angulaires du tableau suivant sont rduites la rf-
rence et corriges des dv.
Les distances donnes Dr sont rduites la projection (voir chap. 4 7). Le rsultat final
est arrondi au centimtre, comme les donnes.
7 l 080l 8II0kl : l0I08
0'k86l8 8II0k0I
7.1 0oaveatIoas, aotatIoas
La lecture dun angle vertical z, not
aussi V, est ralise de la manire sui-
vante.
Sur la figure 3.35-a, est reprsente une
vue en lvation du cercle vertical dun
thodolite en position de rfrence
(cercle gauche). Nous avons vu au
paragraphe 1.2. que ce cercle est soli-
daire de la lunette. Son zro est plac sur
laxe de la lunette (vise). Lindex de
lecture est fixe et positionn la verti-
cale (znith) du centre optique (t ) de
lappareil, lui-mme stationn la verti-
cale du point S. Lorsque la ligne de vise
passe par un point M, lindex donne
alors la lecture de langle z (ou V) inter-
cept sur le cercle vertical :
N
o|nts
D|stonce
0r (m)
Lecture
Ltp (gon)
0|sement S
Ctp (gon)
0oordonnes
(m) N(m)
1 80 3 000,=0 0,000 0 6,960 : 98: 07,:9 8 :6 980,76
2 81 2 1=,00 :6,62: 6 28,:86 98 967,99 8 :8 69,7
Fig. 3.35-a. : Lecture de langle znithal z
Topographie et topomtrie - S. Milles, J. Lagofun
130 MESURES ANGULAIRES
z = angle ( t M , t I ) ; z est appel angle znithal : cest un angle projet dans le plan
vertical du point de station.
Remarque
Pour que lutilisateur obtienne un angle voluant positivement en sens horaire, le cercle
est suppos gradu en sens trigonomtrique.
Pour simplifier le schma de lecture dun angle znithal, on considre que le zro de la
graduation est au znith lorsque lappareil est en station.
On considre alors que tout se
passe comme si le cercle vertical
tait fixe et que lindex de lec-
ture se dplaait avec la vise
(fig. 3.35-b).
Ceci permet de faire apparatre
plus clairement :
G langle de site i entre
lhorizon et la vise ;
G langle nadiral n entre le
nadir et la vise.
Les configurations des figures
3.35-a et 3.35-b correspondent
la position de rfrence de
lappareil utilis : dans cette po-
sition (cercle gauche ou bien
droite), langle z vaut 100 gon
sur lhorizontale.
En position de rfrence, une rotation de la lunette de haut en bas donne une augmenta-
tion de langle z de 0 200 gon.
Aprs un double retournement, la mme rotation donne une volution inverse : les
angles diminuent de 399 gon 200 gon.
Le cercle gauche de loprateur (CG) est la position de rfrence de la plupart des
appareils optico-mcaniques classiques. Soit un point M vis au thodolite, on note
gnralement :
G V tout angle mesur dans un plan vertical ;
G z angle znithal ;
G i angle de site (par rapport lhorizon) ;
G n angle nadiral (par rapport au nadir).
Fig. 3.35-b. : Angles verticaux z, i et n
Topographie et topomtrie - S. Milles, J. Lagofun
MESURES ANGULAIRES 131
Pour la suite, nous avons prfr la notation V pour les angles znithaux car langle V
mesur par les appareils modernes est toujours langle znithal z. De plus, cela permet
dviter la confusion avec les coordonnes notes Z.
Les relations entre ces angles sont :
Langle i est compt positif dans le sens inverse horaire de manire obtenir un angle
de site positif pour une vise au-dessus de lhorizon et un angle de site ngatif pour une
vise en dessous de lhorizon.
Langle n est compt positif en sens inverse horaire ; il vaut 0 au nadir et 200 au znith.
7.2 aIe0r moyeaae 4'0a aaIe vertIcaI
ar 4o0hIe reto0raemeat
Pour la suite, nous admettrons que la position de rfrence de notre appareil mcanique
est le cercle gauche (CG).
Sur les schmas de la figure 3.36, on constate quaprs un double retournement le sens
dvolution de la graduation du cercle vertical est invers. Langle lu en cercle droit V
CD
nest donc pas directement comparable avec langle lu en cercle gauche V
CG
, comme
ctait le cas avec les angles horizontaux.
La relation entre les deux lectures est : V
CG
= 400 V
CD
Langle final moyen dduit des deux lectures est :
n 200 V = i 100 V = 100 n i =
Fig. 3.36. : Effet du double retournement sur la mesure de langle vertical
V
V
CG
400 V
CD
( ) +
2
--------------------------------------------- =
Topographie et topomtrie - S. Milles, J. Lagofun
132 MESURES ANGULAIRES
Remarque
G Si la prcision des mesures ne ncessite quune lecture, elle sera faite en position
de rfrence de manire lire directement langle V. Dans ce cas, V = V
CG
.
G Sur le terrain, on vrifie en permanence la cohrence de V
CD
et V
CG
pour limiter les
fautes de lecture.
G On peut augmenter la prcision de lecture en effectuant les lectures de langle V sur
les trois fils (stadimtriques S et S, niveleur N) : ceci minimise les erreurs de
points et les risques de faute de lecture.
Exemple de lectures multiples
Le tableau ci-dessus donne un exemple de lectures multiples.
On tient compte du fait que les fils sinversent lors du double retournement : le fil
stadimtrique suprieur S en CG devient le fil infrieur en CD.
Les lectures en CD ont donc t inverses.
On peut contrler la validit des lectures en faisant la moyenne (S + S)/ 2 qui doit
redonner une valeur voisine de N.
Langle final V est la moyenne arithmtique des trois valuations sur chaque fil.
Remarquez que lcart angulaire entre les lectures S et S doit tre constant : il est
fonction de loptique de lappareil (voir la constante stadimtrique au chapitre 5
1.2.6).
On peut valuer cet cart : pour K = 100, tan (/ 2) 1/ 200 , on a 0,636 6 gon.
7.3 rre0r 4'Ia4ex vertIcaI
Lintrt du double retournement est, comme pour les angles horizontaux, de limiter les
fautes de lecture et dliminer certaines erreurs systmatiques ou accidentelles (voir 3).
Dans le cas de mesure dangles verticaux, le double retournement permet dliminer :
G lerreur dexcentricit de laxe optique par rapport laxe secondaire ;
f||s
00 ] 0D
00
(gon)
0D
(gon)
Ang|e V moyen :
[00 + (400- 0D)]]2
S']S 92,128 30,7532 92,70=8
N]N 92,=800 307,0711 92,70=:
S]S' 92,7973 307,3903 92,708:
Moyenne :
(S'+S)]2
92,=80 807,078
S - S' 0,68=: 0,687 92,70=8
Topographie et topomtrie - S. Milles, J. Lagofun
MESURES ANGULAIRES 133
G lerreur dindex de cercle vertical : en effet, quil soit manuel (nivelle dindex) ou
automatique (compensateur), le dispositif des appareils modernes ne cale pas exacte-
ment le zro (index de lecture) la verticale du centre du cercle mais dans deux
positions voisines symtriques par rapport cette verticale ;
G le dfaut de tourillonnement (non-perpendicularit de laxe secondaire et de laxe
principal).
Sur les schmas de la figure 3.37, on suppose la prsence dune erreur angulaire Vo de
position de lindex du cercle vertical par rapport la verticale du centre du cercle.
Ce dfaut est une constante de lappareil qui peut varier. Il peut brusquement augmenter
si la nivelle dindex vertical est drgle ou si le compensateur est dfaillant. Il convient
donc de lvaluer rgulirement et de vrifier quil est peu prs constant (aux erreurs de
lecture prs). Si lon constate quil varie beaucoup dune station lautre, cest que le
systme de calage de lindex vertical est drgl.
En cercle gauche, loprateur lit V
CG
, langle V cherch vaut V = V
CG
Vo.
En cercle droit, loprateur lit V
CD
, langle V cherch vaut V = 400 V
CD
+ Vo.
Si on fait la moyenne des deux valeurs, on retrouve V = (V
CG
+ (400 V
CD
))/2.
Si on soustrait les deux quations, on isole Vo et on obtient
La valeur de Vo trouve est aussi entache des erreurs de lecture, de point, etc., si bien
quil est impossible de dire si cest bien la valeur de Vo seul que lon mesure ainsi (sauf
Fig. 3.37. : Erreur dindex du cercle vertical
Vo
V
CG
V
CD
+ ( ) 400
2
--------------------------------------------- =
Topographie et topomtrie - S. Milles, J. Lagofun
134 MESURES ANGULAIRES
dans le cas dune faute grossire de calage ou dans le cas dun drglement du systme
de calage manuel ou automatique de lindex vertical).
Grce au double retournement, on arrive donc liminer certaines erreurs et en particu-
lier lerreur dindex vertical. Sur les appareils de bas de gamme qui ne disposent pas dun
dispositif de calage prcis de lindex vertical (manuel ou automatique), cette moyenne
des lectures CG et CD permet damliorer la prcision de mesure de V.
7.4 kIIcatIoa
On cherche connatre laltitude dun
point inaccessible C connaissant seu-
lement laltitude dun point proche A
qui servira de rfrence. Si lon peut
mesurer la distance horizontale AC, on
peut calculer la dnivele de A vers C
en mesurant langle V lu de A sur C et
la hauteur de laxe des tourillons ht
(fig. 3.38-a).
Laltitude est donne par :
H = Dh . cot V
Une solution pour obtenir la distance horizontale
Dh est de crer une base AB par adjonction dun
deuxime point B, de mesurer cette base et de
mesurer les angles horizontaux CBA et CAB. Ceci
permet de rsoudre le triangle ABC et donc de
calculer les distances horizontales AC et BC
(fig. 3.39-a). Laltitude de C est alors :
On peut aussi calculer laltitude de C deux fois :
une premire fois depuis A et une seconde depuis
B et ainsi contrler les rsultats. Pour cela, il faut dterminer laltitude de B et ne pas
oublier de mesurer la hauteur des tourillons ht chaque station.
Laltitude du point A est donne par H
A
= 5,32 m et les mesures sur le terrains sont
donnes dans le tableau ci-aprs :
Fig. 3.38-a. : Point parfaitement inaccessible
Fig. 3.39-a. : Vue en plan
H
C
H
A
ht
Dh
V tan
----------- + + =
Topographie et topomtrie - S. Milles, J. Lagofun
MESURES ANGULAIRES 135
La distance Dp est mesure au ruban suivant la pente de A vers B.
Le dtail des calculs est le suivant :
G on dtermine la distance horizontale AB (Dp moyenne = 48,935 m).
Dans le triangle ABt
a
on obtient langle vertical que lon aurait eu si le thodolite avait
t stationn avec son axe des tourillons en A : 100,4859 gon.
On en dduit la distance horizontale et la dnivele de A vers B :
Dh = 48,935 . sin(100,4859) = 48,934 m
H = 48,935 . cos(100,4859) = 0,373 m
Dans le triangle ABt
b
on obtient de mme : 99,4978 gon.
On en dduit la distance horizontale et la dnivele de B vers A :
Dh = 48,935 . sin(99,4978) = 48,933 m
H = 48,935 . cos(99,4978) = 0,386 m
t
v|s
0
m
Ang|es vert|coux Ang|es hor|zontoux
V
+/
gon
V
+,
gon
Vo
mgon
V
gon
Hz
+/
gon
Hz
+,
gon
cort
mgon
Hz
gon
Stot|on A li - 1,7 m
0 57,85=7 3=2,1=9 0,8 :7,8:89 12,3232 212,322= -0,8 2,8228
8 =8,93 102,57 297,3=3 0,6 02,6:70 81,12=2 281,1253 , 8,2=8
Stot|on 8 li - 1,72 m
A =8,9= 101,735= 298,252 0,8 0,78: 3,12=5 203,1237 -0,8 8,2=
0 5,=887 3=3,5123 0,: :6,=882 7,==5 27,=8 2,8 76,6=:7
Fig. 3.39-b. : Mesures entre les points A et B (vue en lvation)
Topographie et topomtrie - S. Milles, J. Lagofun
136 MESURES ANGULAIRES
On prend comme valeur moyenne : Dh = 48,934 m et H
AB
= 0,380 m.
On en dduit laltitude de B : H
B
= 5,32 0,380 = 4,94 m.
Remarque
Dans ce cas, dune part, la dnivele tant petite par rapport la distance entre les deux
points, et dautre part, la prcision finale cherche tant de lordre du cm, il tait
possible de prendre directement Dh = Dp.
G La rsolution du triangle horizontal ABC donne les angles A, B et C :
Angle en A 81,1248 12,3228 = 68,8020 gon
Angle en B 76,6457 3,1241 = 73,5216 gon
Angle en C 200 68,8020 73,5216 = 57,6764 gon
G Les distances horizontales AC et BC sont :
AC = 48,934/ sin(57,6764) . sin(73,5216) = 56,875 m
BC = 48,934/ sin(57,6764) . sin(68,8020) = 54,858 m
G Laltitude de C depuis A est :
H
C
= 5,32 + 1,67 + 56,875/ tan(57,8539) = 51,316 m
G Laltitude de C depuis B est :
H
C
= 4,94 + 1,72 + 54,858/ tan(56,4882) = 51,338 m
Laltitude du point C est donc :
H
C
= 51,33 m 1 cm (hauteur denviron 46 m pour Miss Liberty ).
Ces calculs peuvent aussi tre effectus laide du tableau PTINAC.XLS du
cdrom de louvrage.
Topographie et topomtrie - S. Milles, J. Lagofun
Accueil | Remonter | Enqute | Complments | Corrections tome 1 |
Corrections tome 2 | Problmes lis l'outil informatique
Merci de me signaler toute autre erreur ou faute.
Un oubli rparer : le site internet de la socit Leica est www.leica-geosystems.com.
Une injustice : le nom de Jean Lassauque devait figurer en couverture, il a t relgu
la premire page.
Page 14 , figure 2.3-a. :
Page 37 : les constantes Est et Nord de la zone Lambert 4 sont fausses (problme
d'units !) : il faut lire 234,58 m pour la constante est, et 185 861,369 m pour la
constante nord.
Page 43, paragraphe 3.5.1.2 : dans la formule approche de m remplacer "Phi indice
2" par "Phi au carr" (4eme ligne).
Page 195 : erreur dans la formule de tangente(alpha/2) en fin de page, remplacez (m1
+ m2) par (m1 - m2).
Page 246 : deuxime formule donnant (Delta hi) vers le milieu de la page, la deuxime
fraction a t rpte deux fois par erreur.
Page 251, la 2eme formule de l'encadr du haut de page (formule donnant Dhs)
contient une faute : le 2eme terme Di doit tre lev au carr.
Page 294 , Figure 7.20 : inversion entre les lgendes PDOP et GDOP.
Page 298 : oui, le traceur de la photo fonctionne au fioul... J'avais donn une autre
photo d'un matriel plus rcent, mais...
Page 364 : la formule du haut de la page a t victime du correcteur fou. La bonne est
donne ci-dessous.
erreur de rfrence, c'est la mme que la
figure 2.3-b.
La remise en page finale pour l'dition est la
cause de cette erreur. D'autres erreurs de ce
style sont craindre car la transformation de
nos fichiers Word en fichiers FrameMaker pour
l'dition ne s'est pas faite sans douleur !..
Si vous voulez faire vivre votre ouvrage,
collez sur la figure 2.3-a. une sortie papier du
dessin ci-contre (le bon !), en plus vous
l'aurez en couleur... Si vous dsirez rcuprer
l'original sous AutoCAD, tous les dessins de
l'ouvrage sont rcuprables dans la page des
outils tlcharger de ce site...
Page 1 sur 2 Corrections tome 1
12/12/2004 http://perso.club-internet.fr/serge.milles/correcti.htm
Topographie et topomtrie - S. Milles, J. Lagofun
Accueil | Remonter | Enqute | Complments | Corrections tome 1 |
Corrections tome 2 | Problmes lis l'outil informatique
Page 65 : Le schma
1.49-b n'est videmment
pas une zone
d'indcision ; le graphiste
qui a transform nos
fichiers Word dans le
format ncessaire
l'dition a modifi le
schma et n'a pas pris la
peine de contrler s'il
ressemblait l'original
qu'il avait cot de lui...
Ci-contre le schma
original.
Page 82, dans la
rsolution graphique le 5eme point entr est faux (point E); prenez la valeur exacte
dans le tableau du haut de la page.
Page 96, la figure 1.79 a t dilate dans le sens des x seulement ce qui lui donne un
air avachi indpendant de notre volont.
Page 116 : rectifier le dernier tableau (triangle 801-802-803) avec les valeurs
suivantes
Page 117, la polygonale de la page suivante est aussi modifie ainsi :
Page 121 : erreur de rfrence, le 10.3.3.1 fait rfrence au paragraphe 8.2.8. du
chapitre 5.
Page 178 : erreur de rfrence, le 2.1.2 fait rfrence la formule de Sarron qui se
trouve au chapitre 5, 6.3.
Page 197 : l'angle orient (ab) est mal dessin sur la figure 3.29. : il faut lui ajouter
200 gon car il dmarre du prolongement du cot (a). La valeur numrique prendre
Cot Longueur (m) Angle oppos (gon)
801-803 98,30 152,0063
801-802 78,025 36,5649
802-803 25,64 11,4288
Vrif : 200,0000
Point Dh (m) Angle Hg (gon) G (gon) DE (m) DN(m) E (m) N(m)
800 793 061,66 3 312 886,49
109,19 292,3478 -108,40 -13,09
p:10.8pt;mso
-
height
-
rule:exactly">801
400 - 69,2305 792 953,25 3 312 873,40
98,30
23,1173 34,92 91,89
803
400 - 36,5649
792 988,17 3 312 965,29
25,64 186,5524 5,38 -25,07
802 400-152,0063-
92,0300
792 993,55 3 312 940,22
86,75
142,5161 68,11 -53,72
800
400 - 50,1683
793 061,66 3 312 886,49
292,3478
802
Fermetures 0,0000 0,01 0,01
Page 1 sur 2 Corrections tome 2
12/12/2004 http://perso.club-internet.fr/serge.milles/correcti1.htm
Topographie et topomtrie - S. Milles, J. Lagofun
Merci de me signaler toute autre erreur ou faute.
Mise jour de cette page : 30/10/2004
dans le calcul est donc : (ab) = 260,5143 gon.
Page 211 : la formule de calcul de l'angle alpha (sinus(alpha) au bas de la page) peut
tre modifie avantageusement en enlevant la valeur absolue sur (R2-R1). L'angle alpha
peut ainsi tre ngatif ce qui permet la formule de s'appliquer dans tous les cas de
figure.
Page 256 : erreurs dans le programme de rsolution de triangles (cas n4).
tlchargez le dernire version des programmes BASIC ici ou bien modifiez les lignes
suivantes :
340 IF CA<CB*SIN(AA) AND AA<=100 THEN GOTO 390
345 IF CA<=CB AND AA>=100 THEN GOTO 390
350 REM supprimer cette ligne
365 IF CA>CB*SIN(AA) AND AA<100 AND CA<=CB THEN GOTO 375
Page 287 : le systme rsoudre est en fait le suivant ...
Page 295 : enlever un zro devant la valeur de cos(0,1rad) = 0,995, 6eme ligne du
paragraphe 10.3.
Page 299 : paragraphe 11.2.4, erreur typo, remplacer la valeur 34,561 par 34,651 la
4eme ligne de ce paragraphe.
Page 2 sur 2 Corrections tome 2
12/12/2004 http://perso.club-internet.fr/serge.milles/correcti1.htm
Topographie et topomtrie - S. Milles, J. Lagofun
Vous aimerez peut-être aussi
- Fou de Pâtisserie #25 Sept Oct 2017Document132 pagesFou de Pâtisserie #25 Sept Oct 2017Audrey Christophe PJ Royo83% (6)
- Résumé2 Topographie 1Document17 pagesRésumé2 Topographie 1Solhi EssaidPas encore d'évaluation
- TOPO I+II+cor-compil ExtraitDocument218 pagesTOPO I+II+cor-compil ExtraitTudor-Vlad MateiPas encore d'évaluation
- Chapitre I Topo 1 2019 2020 PDFDocument14 pagesChapitre I Topo 1 2019 2020 PDFKacimi AimenPas encore d'évaluation
- Documentation CadastraleDocument2 pagesDocumentation Cadastralejordanwabo22Pas encore d'évaluation
- Exposé Sur GPSDocument9 pagesExposé Sur GPSsimoarbia76100% (1)
- Cours Topographie 01Document11 pagesCours Topographie 01M'hmed ChouiniPas encore d'évaluation
- Cours de Topographie2017Document99 pagesCours de Topographie2017Osmanovic14Pas encore d'évaluation
- Droit Du Technicien Geometre TopoDocument5 pagesDroit Du Technicien Geometre TopoamazarPas encore d'évaluation
- Boi Cad Topo 20 10 10 2012 09 12 PDFDocument47 pagesBoi Cad Topo 20 10 10 2012 09 12 PDFDrissi KarimPas encore d'évaluation
- Travaux Diriges en Nivellement Master 1 IpdDocument5 pagesTravaux Diriges en Nivellement Master 1 IpdBaye DiopPas encore d'évaluation
- Formation CovadisDocument5 pagesFormation CovadisMohamedAitLhaj100% (1)
- Referentiels GeodesiquesDocument56 pagesReferentiels GeodesiquesSurvey LandPas encore d'évaluation
- Le GPS Différentiel (DGPS) Et Temps Réel (GPS RTK)Document6 pagesLe GPS Différentiel (DGPS) Et Temps Réel (GPS RTK)Wadh Mis100% (1)
- TopographieDocument6 pagesTopographieidriss100% (2)
- Topographie PapierDocument6 pagesTopographie PapierWassimRahmouniPas encore d'évaluation
- Topographie ElementaireDocument84 pagesTopographie ElementaireYacine AounallahPas encore d'évaluation
- Geodesie Didier Bouteloup Chap1Document34 pagesGeodesie Didier Bouteloup Chap1MansourLassoued100% (1)
- Formulaire TOPO V2013 PDFDocument13 pagesFormulaire TOPO V2013 PDFRachid IpPas encore d'évaluation
- Copro ChohchohDocument22 pagesCopro Chohchohbadr dinePas encore d'évaluation
- Calculs ToposDocument42 pagesCalculs Toposmeite moustaphaPas encore d'évaluation
- GEC - 240 - Introducttion à La TopographieDocument33 pagesGEC - 240 - Introducttion à La TopographieTANAN AbdousalmPas encore d'évaluation
- NIVELLEMENTDocument12 pagesNIVELLEMENTAnimos TVPas encore d'évaluation
- Top ConDocument9 pagesTop ConAb Jaouad100% (1)
- PresentationOTC ENIT PDFDocument24 pagesPresentationOTC ENIT PDFMohamed Ghrib100% (1)
- Topographie GeneraleDocument34 pagesTopographie GeneralehaercreaPas encore d'évaluation
- TOPOGRAPHIEDocument1 pageTOPOGRAPHIEAndreeaCoceaPas encore d'évaluation
- Role de L'igtDocument18 pagesRole de L'igttocotocoPas encore d'évaluation
- 272157857-Cour T o P o - WatermarkDocument49 pages272157857-Cour T o P o - WatermarkSarah AmioPas encore d'évaluation
- Topographie Altimetrie Cours Version 001 2007Document25 pagesTopographie Altimetrie Cours Version 001 2007nounaPas encore d'évaluation
- CalTopo Chap 2Document4 pagesCalTopo Chap 2Haithem KiassaPas encore d'évaluation
- Rap de ST en Topogr 2Document26 pagesRap de ST en Topogr 2idrissPas encore d'évaluation
- Implantation Dun BatimentDocument105 pagesImplantation Dun BatimentNinou FaresPas encore d'évaluation
- AST Géomètre TopographeDocument44 pagesAST Géomètre TopographeAriane TsopzePas encore d'évaluation
- Rapport de Stage Partie 2Document46 pagesRapport de Stage Partie 2VIENCY Christine ElodiePas encore d'évaluation
- ThéodoliteDocument5 pagesThéodoliteIchiban Iji100% (1)
- # Topographie V9Document52 pages# Topographie V9kabebern100% (1)
- M11 - Topographie 2-Approfondissement BTP-TSGTDocument220 pagesM11 - Topographie 2-Approfondissement BTP-TSGTLuigiPas encore d'évaluation
- Kaabi RapportDocument53 pagesKaabi RapportKLMPas encore d'évaluation
- M15 - Photogrammétrie Et Cartographie BTP-TSGTDocument76 pagesM15 - Photogrammétrie Et Cartographie BTP-TSGTjihane100% (1)
- Termes GénérauxDocument39 pagesTermes GénérauxAmine KiratPas encore d'évaluation
- Rapport-1 TP Dao2/Master-1: Republique Du Senegal Ministere de L'Enseignement Superieur Et de La RechercheDocument21 pagesRapport-1 TP Dao2/Master-1: Republique Du Senegal Ministere de L'Enseignement Superieur Et de La RechercheKouassiPas encore d'évaluation
- GéomaTiqua DépliantDocument2 pagesGéomaTiqua DépliantBrahim Issam100% (1)
- BrierDocument57 pagesBrierrrqym6rf7jPas encore d'évaluation
- Systemes GéodesiquesDocument19 pagesSystemes GéodesiquesDramane CoulibalyPas encore d'évaluation
- Transformations Coordonnees GeodesiquesDocument16 pagesTransformations Coordonnees GeodesiquesAhmed EnnehriPas encore d'évaluation
- 371159455-T OP323-M Od-3-N Otio Ns-De-To P o Gra Phie-Et-Topometrie-Bon - WatermarkDocument32 pages371159455-T OP323-M Od-3-N Otio Ns-De-To P o Gra Phie-Et-Topometrie-Bon - WatermarkMahmoud ArdPas encore d'évaluation
- Examen TopographieDocument1 pageExamen TopographieBouderbala AbdelkaderPas encore d'évaluation
- 1 Topo C2 PDFDocument11 pages1 Topo C2 PDFHichemou BendehinaPas encore d'évaluation
- Cours TOPO-1Document57 pagesCours TOPO-1PROCASEF PROCASEFPas encore d'évaluation
- Cours Topographie PPT - WatermarkDocument99 pagesCours Topographie PPT - Watermarkel alaouiPas encore d'évaluation
- Cours Topographie PPT 1Document104 pagesCours Topographie PPT 1felipe masterPas encore d'évaluation
- TopographieDocument27 pagesTopographieMousab AlamiPas encore d'évaluation
- Modélisation de l'ingénierie publique: Tome 2 : Contexte territorialD'EverandModélisation de l'ingénierie publique: Tome 2 : Contexte territorialPas encore d'évaluation
- 758c832cd0b44ecbc658800e0b6e78 PDFDocument6 pages758c832cd0b44ecbc658800e0b6e78 PDFKLMPas encore d'évaluation
- Chapitre2 Géodesie CartographieDocument74 pagesChapitre2 Géodesie Cartographiefatre1980100% (1)
- Arpentage Des Mines - Chapitre 01Document13 pagesArpentage Des Mines - Chapitre 01Leda DalePas encore d'évaluation
- Mémoire NAHDocument101 pagesMémoire NAHWilliam FedoungPas encore d'évaluation
- La Liste Corsica Fiera de Jean-Antoine GiacomiDocument2 pagesLa Liste Corsica Fiera de Jean-Antoine GiacomiFrance BleuPas encore d'évaluation
- TD1 Cas DutourDocument4 pagesTD1 Cas DutourAbdelhamid ChaouchPas encore d'évaluation
- AftisDocument2 pagesAftisMertah LotfiPas encore d'évaluation
- S3292864 Mobile Confirmation 29552135Document4 pagesS3292864 Mobile Confirmation 29552135Daniel WettenPas encore d'évaluation
- Loi SanitaireDocument61 pagesLoi Sanitaireabdennor555Pas encore d'évaluation
- Éléments Du Corrigé Du Dernier ExerciceDocument7 pagesÉléments Du Corrigé Du Dernier ExerciceBader EddinePas encore d'évaluation
- TP Redressement Monophasé CommandéDocument2 pagesTP Redressement Monophasé CommandéKA DI100% (1)
- Manuel Dinstruction WOLFPACK - FrancaisDocument53 pagesManuel Dinstruction WOLFPACK - FrancaisKishore BarreteauPas encore d'évaluation
- Rapport de Stage Pfmp2Document17 pagesRapport de Stage Pfmp2dc8vsbqt2hPas encore d'évaluation
- Découvrez The Wrong Way To Use Healing Magic en Streaming VF HD Sur French-Stream - WikiDocument2 pagesDécouvrez The Wrong Way To Use Healing Magic en Streaming VF HD Sur French-Stream - Wikilivik68018Pas encore d'évaluation
- CORRECTION SERIE 1 Diag Fin-ConvertiDocument16 pagesCORRECTION SERIE 1 Diag Fin-Convertiaouni yassminePas encore d'évaluation
- 1-7) Le Droit Des ContratsDocument26 pages1-7) Le Droit Des ContratsparetjustinePas encore d'évaluation
- Cat - 793 - PM500 & 1500Document10 pagesCat - 793 - PM500 & 1500Dahi MohamedPas encore d'évaluation
- La Saisie Immobilière - Me UMDocument19 pagesLa Saisie Immobilière - Me UMGuy Neutron100% (1)
- PDF Modele de Modigliani Amp MillerDocument8 pagesPDF Modele de Modigliani Amp MillerSimoPas encore d'évaluation
- Programmation en C++Document71 pagesProgrammation en C++DNaddouchPas encore d'évaluation
- Planos Cartesiano y Pares OrdenadosDocument2 pagesPlanos Cartesiano y Pares Ordenadosescuela.hortenciamoscosoPas encore d'évaluation
- Logique SequentielleDocument28 pagesLogique SequentielleIkram ElaimaPas encore d'évaluation
- Chapitre II Généralités Sur Le Phénomène de Fluage 19062019Document16 pagesChapitre II Généralités Sur Le Phénomène de Fluage 19062019samir bvbPas encore d'évaluation
- Synoptique - Livre Blanc OppbtpDocument1 pageSynoptique - Livre Blanc OppbtpmuctyturayPas encore d'évaluation
- Fiche Equipe Test Fonctionnel - GMTDocument4 pagesFiche Equipe Test Fonctionnel - GMTAstrid JizreelPas encore d'évaluation
- 3 - Contraintes Dans Un Milieu ContinuDocument10 pages3 - Contraintes Dans Un Milieu ContinuAya BabaaliPas encore d'évaluation
- MAR4607Document2 pagesMAR4607mammeri mammeriPas encore d'évaluation
- PNJ Version FinaleDocument67 pagesPNJ Version FinaleMariama DaboPas encore d'évaluation
- Case Concerning Maritime DelimitationDocument45 pagesCase Concerning Maritime DelimitationSophia CastilleroPas encore d'évaluation
- Initiation A L'informatiqueDocument44 pagesInitiation A L'informatiquegnatikoyaoedemPas encore d'évaluation
- Epreuve BDD 2019Document4 pagesEpreuve BDD 2019Thinkpad LenovoPas encore d'évaluation
- Qui Se Souvient de Fernand Iveton ..Document2 pagesQui Se Souvient de Fernand Iveton ..tralala_002Pas encore d'évaluation