Chap2 - Files D - Attente
Chap2 - Files D - Attente
Télécharger au format pdf ou txt
Vous aimerez peut-être aussi
- Markov Cours de Lxcée PDFDocument17 pagesMarkov Cours de Lxcée PDFphilippe dmtPas encore d'évaluation
- Corrig typeWSO2017-2018Document4 pagesCorrig typeWSO2017-2018فركوس محمد العيد100% (2)
- Serie TD2Document4 pagesSerie TD2Ilham TimadjerPas encore d'évaluation
- Régression Linéaire PythonDocument4 pagesRégression Linéaire PythonlalaouiPas encore d'évaluation
- Simulation D'un Réseau de Jackson Sous NS-2Document27 pagesSimulation D'un Réseau de Jackson Sous NS-2Mohamed BGcityPas encore d'évaluation
- Transp Files Attente PDFDocument45 pagesTransp Files Attente PDFAlaa Din AL-khwarizmiPas encore d'évaluation
- PAA-Chaines de Markov-2020-2021Document32 pagesPAA-Chaines de Markov-2020-2021yaudas100% (1)
- tdM1Stoc 1314Document20 pagestdM1Stoc 1314Nanand Amany Armel RegisPas encore d'évaluation
- CH II ProcMarkovContinuDocument105 pagesCH II ProcMarkovContinumasse dianePas encore d'évaluation
- Corrige Mat 482007Document5 pagesCorrige Mat 482007Anonymous JIjLxKYApNPas encore d'évaluation
- Serie 3-CorrectionDocument9 pagesSerie 3-Correctionmouad friginiPas encore d'évaluation
- CM Distanciel (Programme Et Corrigés Exo CM)Document10 pagesCM Distanciel (Programme Et Corrigés Exo CM)Maia ChaillotPas encore d'évaluation
- Recueuil D'exercices de ProbabiltésDocument9 pagesRecueuil D'exercices de ProbabiltésNAOURI MOHAMMEDPas encore d'évaluation
- Corrigé DS 20-21Document4 pagesCorrigé DS 20-21Imen MassoudiPas encore d'évaluation
- TD13densites UsuellesDocument2 pagesTD13densites UsuellesAntonio EscobarPas encore d'évaluation
- Exercices de RévisionDocument1 pageExercices de RévisionAymane Fajri100% (1)
- Projet File D'attenteDocument41 pagesProjet File D'attenteAbdou SarrPas encore d'évaluation
- Cours File D'attenteDocument19 pagesCours File D'attenteSakù ExøTïc ØtāKůPas encore d'évaluation
- Séance 4 Corrigé TD1 Partie 2 QuaramDocument6 pagesSéance 4 Corrigé TD1 Partie 2 QuaramMaryem MaskouriPas encore d'évaluation
- Chaine de MarkovDocument287 pagesChaine de MarkovSaleh Bgf100% (2)
- Bodineau-Chaînes de Markov Et MartingalesDocument216 pagesBodineau-Chaînes de Markov Et MartingalesyelbahPas encore d'évaluation
- Chaines de Markov 1Document11 pagesChaines de Markov 1LebePas encore d'évaluation
- Files D'attentesDocument44 pagesFiles D'attentesmohamed100% (1)
- Annales 2011 2016 ProbabilitesDocument166 pagesAnnales 2011 2016 ProbabilitesAbderrahim ChoulliPas encore d'évaluation
- Exercices Variables AleatoiresDocument15 pagesExercices Variables AleatoiresMohamed MabroukPas encore d'évaluation
- Chapitre 4Document44 pagesChapitre 4Abderrahim IganePas encore d'évaluation
- Polycopie SEP 2021-ConvertiDocument46 pagesPolycopie SEP 2021-ConvertiSoheibPas encore d'évaluation
- Comprendre Les Files D'attenteDocument12 pagesComprendre Les Files D'attentepierree1Pas encore d'évaluation
- Cours Simulation 2 13Document12 pagesCours Simulation 2 13Ilham TimadjerPas encore d'évaluation
- Chaines MarkovDocument78 pagesChaines MarkovNassima HcnPas encore d'évaluation
- 1-Loisprobav04.ppt (Mode de Compatibilité)Document41 pages1-Loisprobav04.ppt (Mode de Compatibilité)Hichem NeggazPas encore d'évaluation
- ECT2-Cours Chapitre 8Document18 pagesECT2-Cours Chapitre 8Abdellah MazighiPas encore d'évaluation
- Serie - 3 Variable Ale - Atoire - Completee PDFDocument4 pagesSerie - 3 Variable Ale - Atoire - Completee PDFotmanePas encore d'évaluation
- Test Stat RDocument54 pagesTest Stat RYAMEOGOPas encore d'évaluation
- Correction de TDDocument10 pagesCorrection de TDHajar AnejjarPas encore d'évaluation
- TP 1 - Master Informatique Ann Ee 1: 1.1 Le Jeu de Donn Ees Iris (Fisher, 1936)Document6 pagesTP 1 - Master Informatique Ann Ee 1: 1.1 Le Jeu de Donn Ees Iris (Fisher, 1936)Mariama DIOUFPas encore d'évaluation
- Variables Continues UsuellesDocument20 pagesVariables Continues UsuellesHedi cherifPas encore d'évaluation
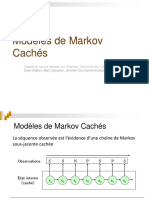
- 3 - Modeles de Markov CachesDocument34 pages3 - Modeles de Markov CachesWISSALPas encore d'évaluation
- Naive Bayes ClassifierDocument35 pagesNaive Bayes ClassifiershimunoPas encore d'évaluation
- Machine de TuringDocument10 pagesMachine de TuringDon Pablo EscobarPas encore d'évaluation
- 02 - TD N°2 - Taux de Variation Et Coefficient Multiplicateur - 2009-2010Document3 pages02 - TD N°2 - Taux de Variation Et Coefficient Multiplicateur - 2009-2010Soulaiman Harrak100% (1)
- Cours Probabilites Lois Continues ExercicesDocument3 pagesCours Probabilites Lois Continues ExercicesDony KravitzPas encore d'évaluation
- FICHE 1 - Les Lois de ProbabilitésDocument3 pagesFICHE 1 - Les Lois de ProbabilitéshallikPas encore d'évaluation
- Files DDocument13 pagesFiles Dbenassane100% (2)
- Chaînes de MarkovDocument4 pagesChaînes de MarkovCristiano da silvaPas encore d'évaluation
- Chaîne de Markov. File1Document13 pagesChaîne de Markov. File1Saleh BgfPas encore d'évaluation
- Corrigé de Lexamen de Probablité 2019.2020Document4 pagesCorrigé de Lexamen de Probablité 2019.2020Mouna KhlifiPas encore d'évaluation
- Simulation Des LoisDocument21 pagesSimulation Des LoisAbdellahi NafaPas encore d'évaluation
- Files Attente 2020 PDFDocument108 pagesFiles Attente 2020 PDFYassminaPas encore d'évaluation
- Exos Var Densite 2020-2021Document9 pagesExos Var Densite 2020-2021Landry MBADOUMOUPas encore d'évaluation
- Chaines de Markov À Temps DiscretDocument32 pagesChaines de Markov À Temps DiscretBlh OussamaPas encore d'évaluation
- Classification Supervise eDocument20 pagesClassification Supervise eSofiene GuedriPas encore d'évaluation
- Examen ProbaStat 2018 CorrDocument4 pagesExamen ProbaStat 2018 CorrErmosalVerboisPas encore d'évaluation
- Chaine de Markov À Temps DiscretDocument59 pagesChaine de Markov À Temps DiscretBlh OussamaPas encore d'évaluation
- TD N°6Document5 pagesTD N°6Maha BadriPas encore d'évaluation
- Cours Processus de PoissonDocument21 pagesCours Processus de PoissonMano AgbodoPas encore d'évaluation
- Serie Exercices Sur Les Lois de ProbabliteDocument2 pagesSerie Exercices Sur Les Lois de Probablitenassim lrrrPas encore d'évaluation
- Conducteur 1Document20 pagesConducteur 1RisalaPas encore d'évaluation
- File D'attenteDocument30 pagesFile D'attenteMziou Hammadi100% (2)
- Cours FADocument10 pagesCours FAouichaouiabdenour23Pas encore d'évaluation
- ModsimDocument16 pagesModsimHanene Kohinoor BrahmiaPas encore d'évaluation
- Reseaux Securite Definitive 1Document3 pagesReseaux Securite Definitive 1فركوس محمد العيدPas encore d'évaluation
- Apprentissage Automatique PredictionDocument53 pagesApprentissage Automatique Predictionفركوس محمد العيدPas encore d'évaluation
- AnalysePredictive ArbreDécisionDocument35 pagesAnalysePredictive ArbreDécisionفركوس محمد العيدPas encore d'évaluation
- 02 Arbre de DécisionDocument58 pages02 Arbre de Décisionفركوس محمد العيدPas encore d'évaluation
- 01 Intro RegLin RegLogBinDocument47 pages01 Intro RegLin RegLogBinفركوس محمد العيدPas encore d'évaluation
- Web Sémantique Et Ontologie (WSO) : Promotion 2019/2020Document10 pagesWeb Sémantique Et Ontologie (WSO) : Promotion 2019/2020فركوس محمد العيدPas encore d'évaluation
- Correction ComplexitéDocument4 pagesCorrection Complexitéفركوس محمد العيدPas encore d'évaluation
- Web Sémantique Et Ontologie (WSO) : Rapport de TP N°1Document9 pagesWeb Sémantique Et Ontologie (WSO) : Rapport de TP N°1فركوس محمد العيدPas encore d'évaluation
- Cours 2 Loi de Poisson Cours Et ExercicesDocument13 pagesCours 2 Loi de Poisson Cours Et Exercicesفركوس محمد العيدPas encore d'évaluation
- RDF Et RDFS: O.Curé (199)Document56 pagesRDF Et RDFS: O.Curé (199)فركوس محمد العيد100% (1)
- Algorithmique Avancée Introduction PDFDocument22 pagesAlgorithmique Avancée Introduction PDFفركوس محمد العيدPas encore d'évaluation
- Chaines de MarkovDocument352 pagesChaines de Markovفركوس محمد العيد100% (1)
- Chapitre 3Document34 pagesChapitre 3فركوس محمد العيدPas encore d'évaluation
- Chapitre 1 - Analyse LexicaleDocument6 pagesChapitre 1 - Analyse Lexicaleفركوس محمد العيدPas encore d'évaluation
- Pradditus RapportDocument26 pagesPradditus RapportTayeb BenbrahimPas encore d'évaluation
- Quelles Approches Avec Quelles DonnéesDocument24 pagesQuelles Approches Avec Quelles DonnéesKawtar KaPas encore d'évaluation
- TFC CLEMENCDocument3 pagesTFC CLEMENCNelson UJAMAAPas encore d'évaluation
- REGA7Document158 pagesREGA7ericPas encore d'évaluation
- Introduction DemographieDocument39 pagesIntroduction DemographieHousseyni GuindoPas encore d'évaluation
- AP-HP Reglement Interieur 2018Document309 pagesAP-HP Reglement Interieur 2018claireduranquetPas encore d'évaluation
- Projet ThesesDocument28 pagesProjet Thesesbachlive2006Pas encore d'évaluation
- GuideTEN-6000 2015 06Document8 pagesGuideTEN-6000 2015 06Seif SaadPas encore d'évaluation
- Liste Lissage Capillaire270711Document6 pagesListe Lissage Capillaire270711H. ChristenPas encore d'évaluation
- Le Financement Des Laboratoires de Recherche Universitaires en Algerie - Cas Des Credits D'equipement Dans Le Cadre Du FNRSDTDocument15 pagesLe Financement Des Laboratoires de Recherche Universitaires en Algerie - Cas Des Credits D'equipement Dans Le Cadre Du FNRSDTimanPas encore d'évaluation
- Analyse Statistique Tp3Document3 pagesAnalyse Statistique Tp3Khaoula KmPas encore d'évaluation
- COURS Méthodologie de La Recherche 5Document92 pagesCOURS Méthodologie de La Recherche 5milca PeindiPas encore d'évaluation
- Lois de ProbabiliteìDocument26 pagesLois de Probabiliteìyomnsaadi307Pas encore d'évaluation
- StatistiquesDocument7 pagesStatistiquesdavidhassan858Pas encore d'évaluation
- Formulation de Béton Par La Méthode de Dreux GorisseDocument58 pagesFormulation de Béton Par La Méthode de Dreux GorisseYa SeenPas encore d'évaluation
- Experience ClientDocument24 pagesExperience ClientLe tonton100% (1)
- KhodaryDocument33 pagesKhodaryAyyoub DriouechPas encore d'évaluation
- These en Logistique InverseDocument148 pagesThese en Logistique Inversefatimazahra1602100% (1)
- Exposé EconométrieDocument31 pagesExposé Econométriehanane ghyattePas encore d'évaluation
- Controle-Gestion. Cours Janvier 2022Document108 pagesControle-Gestion. Cours Janvier 2022Francois GregoryPas encore d'évaluation
- Cours Initiation À La Recherche Scientifique Word 01Document9 pagesCours Initiation À La Recherche Scientifique Word 01Chawki MokademPas encore d'évaluation
- Industrial Maintenance Meeting by SlidesgoDocument25 pagesIndustrial Maintenance Meeting by SlidesgoGloire MutebaPas encore d'évaluation
- 1 - Introduction À La StratégieDocument15 pages1 - Introduction À La StratégieOuma Bâkh100% (1)
- Le Géologue PétrolierDocument6 pagesLe Géologue PétrolierPaterne LoubakiPas encore d'évaluation