Révision Engrenage 2020
Révision Engrenage 2020
Télécharger au format pdf ou txt
Vous aimerez peut-être aussi
- Catalogo de Peças - Cat Cp533e PDFDocument645 pagesCatalogo de Peças - Cat Cp533e PDFLeon Felipe75% (4)
- Mercuriale Mutation Automobile Au 2 Juin 2017Document169 pagesMercuriale Mutation Automobile Au 2 Juin 2017Larry Zongo100% (8)
- Schema Electrique Equipements de Base TT Mk1Document28 pagesSchema Electrique Equipements de Base TT Mk1Engin SimsekPas encore d'évaluation
- TD - Vérin Rotatif AmortiDocument5 pagesTD - Vérin Rotatif AmortiLAILA BNPas encore d'évaluation
- 2018 Timing - Tools FRDocument40 pages2018 Timing - Tools FRsarobidy HAJANAVALONAPas encore d'évaluation
- RedDocument3 pagesRedammiwesterPas encore d'évaluation
- Dispositif SerrageDocument2 pagesDispositif SerrageMohamed Hadjer100% (2)
- Capteur PneumatiqueDocument6 pagesCapteur Pneumatiquemom bakkouch100% (4)
- TD CompresseurDocument11 pagesTD CompresseurSamba Sall100% (1)
- Bride Serrage RapideDocument3 pagesBride Serrage RapideRedaAbdraouf0% (2)
- PressemécaniquecnepDocument4 pagesPressemécaniquecnepYousfi WahidPas encore d'évaluation
- Devoir de Synthèse N°1 - Génie Mécanique Systeme de Fabrication de Couvercles - Bac Technique (2014-2015) MR LotfiDocument12 pagesDevoir de Synthèse N°1 - Génie Mécanique Systeme de Fabrication de Couvercles - Bac Technique (2014-2015) MR Lotfizxhmnzao100% (2)
- EPREUVE - TECHNOLOGIE Génie Mécanique. Convoyeur À BandeDocument6 pagesEPREUVE - TECHNOLOGIE Génie Mécanique. Convoyeur À BandeYounes El GhandouriPas encore d'évaluation
- Controle Acc Emb FreinDocument7 pagesControle Acc Emb FreinkhayachiPas encore d'évaluation
- Embrayage FreinDocument5 pagesEmbrayage FreinHicham BaghdadiPas encore d'évaluation
- Thème 3 Appareil À Brosser Les PatinsDocument4 pagesThème 3 Appareil À Brosser Les PatinsKenou LaudincePas encore d'évaluation
- 4 SC Tech Ds2 2016 17 DPGM Rayons X 2Document4 pages4 SC Tech Ds2 2016 17 DPGM Rayons X 2DHia Ben AichaPas encore d'évaluation
- Simulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysD'EverandSimulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysPas encore d'évaluation
- Sujet 3 PDFDocument5 pagesSujet 3 PDFMohamed Snoussi0% (1)
- Série de Sujets de Révision-TransmettreDocument34 pagesSérie de Sujets de Révision-TransmettrePAUSE RACEPas encore d'évaluation
- Série de Révision2 (DR) (Corrigé)Document6 pagesSérie de Révision2 (DR) (Corrigé)Wagih MrassiPas encore d'évaluation
- Embrayages Frein 10 11 12 PDFDocument7 pagesEmbrayages Frein 10 11 12 PDFmohamed1101100% (1)
- Embr 2020Document4 pagesEmbr 2020Mortadha RabahPas encore d'évaluation
- Devoir de Contrôle N°1 - Génie Mécanique Pompe D'alimentation - 3ème Technique (2013-2014) MR Mlaouhi SlaheddineDocument7 pagesDevoir de Contrôle N°1 - Génie Mécanique Pompe D'alimentation - 3ème Technique (2013-2014) MR Mlaouhi SlaheddineMohammed Elhabib ZellalPas encore d'évaluation
- Exercice Engrenages Revision eDocument1 pageExercice Engrenages Revision eakou100% (1)
- Corrige DS2 3ST DT DR GM GE Region KairouanDocument8 pagesCorrige DS2 3ST DT DR GM GE Region KairouanBouabdellaoui saif ennasrPas encore d'évaluation
- Evaluation N°5 (Corrigé)Document8 pagesEvaluation N°5 (Corrigé)Wagih MrassiPas encore d'évaluation
- 01 Exercice BanderoleuseDocument1 page01 Exercice BanderoleuseESSOME ESSOME OLIVIER STEPHANEPas encore d'évaluation
- Devoir de Synthèse N°2 - Technologie MALAXEUR DE SABLE - Bac Technique (2010-2011) MR ZAAFOURI MehrezDocument5 pagesDevoir de Synthèse N°2 - Technologie MALAXEUR DE SABLE - Bac Technique (2010-2011) MR ZAAFOURI MehrezAmira JebaliPas encore d'évaluation
- 01 Tour ParalleleDocument7 pages01 Tour ParallelekhocinePas encore d'évaluation
- Devoir de Contrôle N°2 - Génie Mécanique Technique SYSTEME DE FABRICATION Du CARTON ONDULÉ - 3ème Technique (2011-2012) Elève FaissalDocument6 pagesDevoir de Contrôle N°2 - Génie Mécanique Technique SYSTEME DE FABRICATION Du CARTON ONDULÉ - 3ème Technique (2011-2012) Elève FaissalMrnadhir Mecanique67% (3)
- Dissier TechniqueDocument5 pagesDissier Techniquentab50% (2)
- Technique CDocument8 pagesTechnique CAdnen BOUAZIZIPas encore d'évaluation
- Cours EngrenagesDocument5 pagesCours EngrenagesJesuis ContentPas encore d'évaluation
- Sujet 4 Mecanisme Dentrainement Du Tapis CorrectionDocument5 pagesSujet 4 Mecanisme Dentrainement Du Tapis CorrectionBOUREIMA ZOGONA100% (1)
- Devoir N2 Cotation Bras 2 ASDocument2 pagesDevoir N2 Cotation Bras 2 ASRizouga AbdallahPas encore d'évaluation
- Systeme de Preformage Du CartonDocument11 pagesSysteme de Preformage Du Cartonassiahakmi75% (4)
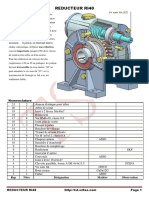
- REDUCTEUR RI40. REDUCTEUR RI40 Page 1. Vis Sans Fin (03) Arbre Creux de SortieDocument6 pagesREDUCTEUR RI40. REDUCTEUR RI40 Page 1. Vis Sans Fin (03) Arbre Creux de SortieFabrigas Kasolo Kalala100% (1)
- Devoir de Synthèse N°3 2010 2011 (Hazel T)Document9 pagesDevoir de Synthèse N°3 2010 2011 (Hazel T)Kereme JulienPas encore d'évaluation
- Sujet 4Document5 pagesSujet 4elie chanePas encore d'évaluation
- Cours de 2STE TransmissionDocument40 pagesCours de 2STE TransmissionJeulin Marabou60% (5)
- 3 DS2 - DT 2020 - 2021Document5 pages3 DS2 - DT 2020 - 2021Elafif Hamdi100% (1)
- Devoir de Synthèse N°2 - Génie Mécanique - Systéme de Conditionnement de Savons - 3ème Technique (2016-2017) MR Mlaouhi Slaheddine PDFDocument8 pagesDevoir de Synthèse N°2 - Génie Mécanique - Systéme de Conditionnement de Savons - 3ème Technique (2016-2017) MR Mlaouhi Slaheddine PDFkhocine100% (1)
- Résumé de TransmissionDocument3 pagesRésumé de TransmissionHafida EnnajiPas encore d'évaluation
- DPmecaniqueDocument4 pagesDPmecaniquelou louPas encore d'évaluation
- Devoir de Contrôle N°2 - Technologie Unité de Préparation de Membrane de Pile À Cmbustible - Bac Technique (2011-2012) MR ABDELLATIF HENI PDFDocument8 pagesDevoir de Contrôle N°2 - Technologie Unité de Préparation de Membrane de Pile À Cmbustible - Bac Technique (2011-2012) MR ABDELLATIF HENI PDFabdelbasset11Pas encore d'évaluation
- Devoir de Synthèse N°1 - Génie Mécanique Cellule Flexible D'usinage - 3ème Technique (2015-2016) MR Mlaouhi Slaheddine PDFDocument7 pagesDevoir de Synthèse N°1 - Génie Mécanique Cellule Flexible D'usinage - 3ème Technique (2015-2016) MR Mlaouhi Slaheddine PDFmohouchPas encore d'évaluation
- Accouplement TemporaireDocument7 pagesAccouplement TemporaireBÏĞ RÀMÏ100% (1)
- Série de Révision Bac N1 Etude Technologique Part 1Document20 pagesSérie de Révision Bac N1 Etude Technologique Part 1Hamami AymenPas encore d'évaluation
- TD Vis EcrouDocument3 pagesTD Vis EcrouHoussam Had100% (1)
- Système À Étudier - Carton PréforméDocument14 pagesSystème À Étudier - Carton PréforméESSOME ESSOME OLIVIER STEPHANEPas encore d'évaluation
- Ex 3 2steDocument4 pagesEx 3 2steHicham MarzouqPas encore d'évaluation
- Sujet 4 Mecanisme Dentrainement Du TapisDocument5 pagesSujet 4 Mecanisme Dentrainement Du TapisBOUREIMA ZOGONA100% (2)
- TdengrenageDocument5 pagesTdengrenageImane FarrassPas encore d'évaluation
- Devoir de Contrôle N°2 - Technologie Mécanisme de Serrage - 2ème Sciences (2011-2012) MR BEMRIDocument4 pagesDevoir de Contrôle N°2 - Technologie Mécanisme de Serrage - 2ème Sciences (2011-2012) MR BEMRIAhmed OssamaPas encore d'évaluation
- Serie PDFDocument92 pagesSerie PDFAlphonse UrielPas encore d'évaluation
- Devoir de Contrôle N°1 - Génie Mécanique - UNITE DE FABRICATION DE DALLES DE BETON - Bac Technique (2016-2017) MR Bakini Noomen PDFDocument7 pagesDevoir de Contrôle N°1 - Génie Mécanique - UNITE DE FABRICATION DE DALLES DE BETON - Bac Technique (2016-2017) MR Bakini Noomen PDFAdil El AzzouziPas encore d'évaluation
- Lecture DessinDocument5 pagesLecture DessinYousfi WahidPas encore d'évaluation
- Systeme de Percage Et de LamageDocument2 pagesSysteme de Percage Et de LamageWalid Fattoum100% (1)
- Ponce UseDocument7 pagesPonce UseAbderrazak MiassarPas encore d'évaluation
- Devoir de Contrôle N°2 2008 2009 (Ouslatia Kairouan2)Document4 pagesDevoir de Contrôle N°2 2008 2009 (Ouslatia Kairouan2)iman khadir100% (1)
- Série Embrayage Et FreinDocument9 pagesSérie Embrayage Et FreinBouabdellaoui saif ennasrPas encore d'évaluation
- Avec Modification de La VitesseDocument13 pagesAvec Modification de La Vitessesaadrha7iPas encore d'évaluation
- Controle Acc Emb FreinDocument7 pagesControle Acc Emb Freinyassine22Pas encore d'évaluation
- Projet Semestre MA3Document57 pagesProjet Semestre MA3Yosr Ben SaidPas encore d'évaluation
- Thèse Finale1Document114 pagesThèse Finale1Yosr Ben SaidPas encore d'évaluation
- Solutions Exemple 9.4Document126 pagesSolutions Exemple 9.4Yosr Ben SaidPas encore d'évaluation
- Maintenance IndustrielleDocument26 pagesMaintenance IndustrielleYosr Ben SaidPas encore d'évaluation
- Cours Mesure PressionDocument22 pagesCours Mesure PressionYosr Ben SaidPas encore d'évaluation
- Série Dexercices n1Document2 pagesSérie Dexercices n1Yosr Ben SaidPas encore d'évaluation
- Echangeurs ThermiquesDocument10 pagesEchangeurs ThermiquesYosr Ben SaidPas encore d'évaluation
- TD OSE (Série 1)Document6 pagesTD OSE (Série 1)Yosr Ben Said100% (1)
- Série - Machine À Courant Continu À Excitation IndépendanteDocument4 pagesSérie - Machine À Courant Continu À Excitation IndépendanteYosr Ben SaidPas encore d'évaluation
- 2eme Sciences Notes Mrs Ihsen s4Document9 pages2eme Sciences Notes Mrs Ihsen s4Yosr Ben SaidPas encore d'évaluation
- Resume Mme Ihsen 2scDocument2 pagesResume Mme Ihsen 2scYosr Ben Said100% (1)
- BROCHURA JETOUR - FR-LowDocument13 pagesBROCHURA JETOUR - FR-LowMamadou SallPas encore d'évaluation
- Fiche Technique Gamme 82 - P100 - Seed GammisteDocument4 pagesFiche Technique Gamme 82 - P100 - Seed Gammistebrossard810Pas encore d'évaluation
- Ossona Reine Projet - PDF FinalDocument43 pagesOssona Reine Projet - PDF FinalMANDO Vitinie Jespère Deborah100% (1)
- Mercedes MP4 YoupweDocument3 pagesMercedes MP4 Youpweabass ncharePas encore d'évaluation
- 3pages de Cours Sur Le Moteur Eleve 3Document7 pages3pages de Cours Sur Le Moteur Eleve 3Clément GuérinPas encore d'évaluation
- Compresseurs Atlas Copco 186Document2 pagesCompresseurs Atlas Copco 186maryF100% (1)
- 6343 E2 DR Ap Agpf 2015Document13 pages6343 E2 DR Ap Agpf 2015rabbajPas encore d'évaluation
- Manuel Utilisation CC72000Document22 pagesManuel Utilisation CC72000olivier.barbary1317Pas encore d'évaluation
- 0 986 044 400 - Alternateur BOSCH (0986044400)Document3 pages0 986 044 400 - Alternateur BOSCH (0986044400)Sven TackPas encore d'évaluation
- Instructions InstallationDocument3 pagesInstructions InstallationNohman AhmadiPas encore d'évaluation
- Multi ATF (F)Document2 pagesMulti ATF (F)RV PenrroiPas encore d'évaluation
- KUNCI Buku 1 IpaDocument12 pagesKUNCI Buku 1 IpaSerynPas encore d'évaluation
- Luk Tecbr Sac 2017 FRDocument36 pagesLuk Tecbr Sac 2017 FRTM125Pas encore d'évaluation
- Schéma de Fusibles Et Relais Pour Audi A2 (8Z 1999-2005) - Schémas de Boîtes À FusiblesDocument11 pagesSchéma de Fusibles Et Relais Pour Audi A2 (8Z 1999-2005) - Schémas de Boîtes À Fusiblesrandriamahefa dinah duvalPas encore d'évaluation
- Calcul Charge Statique de Basculement ChargeuseDocument10 pagesCalcul Charge Statique de Basculement ChargeuseLiebherrPas encore d'évaluation
- Chapitre I: Pages 1 À 26Document26 pagesChapitre I: Pages 1 À 26ringradPas encore d'évaluation
- Direction: CaractéristiquesDocument5 pagesDirection: Caractéristiquestoni13021302Pas encore d'évaluation
- PROPOSITION COMMERCIALE SOCIETE GMT Groupe Minier TransportDocument13 pagesPROPOSITION COMMERCIALE SOCIETE GMT Groupe Minier TransportIbrahime CamaraPas encore d'évaluation
- Examen Final Moteur L3-2017Document3 pagesExamen Final Moteur L3-2017Khaled Chaib90% (10)
- Transmission de Puissance Prof PDFDocument16 pagesTransmission de Puissance Prof PDFRuppy MIYOUNAPas encore d'évaluation
- Luna Truck Cranes Spec Fa98b1Document10 pagesLuna Truck Cranes Spec Fa98b1Zayra PeñaPas encore d'évaluation
- Cahier Charges BusDocument2 pagesCahier Charges BusnikolasPas encore d'évaluation
- 306 Diesel HDIDocument23 pages306 Diesel HDIJoão DantasPas encore d'évaluation
- FR Comment Remplacer Les Amortisseurs de Suspension Avant Sur Une Peugeot 407Document13 pagesFR Comment Remplacer Les Amortisseurs de Suspension Avant Sur Une Peugeot 407valdestachi4Pas encore d'évaluation
- Réglage Afficheur Et Code Erreur Trotinette GénéralDocument1 pageRéglage Afficheur Et Code Erreur Trotinette GénéralloPas encore d'évaluation
- V2 3 2 Cluntch ControlDocument19 pagesV2 3 2 Cluntch ControlJoseph SehleePas encore d'évaluation