TP Cde Des Procedés
TP Cde Des Procedés
Télécharger au format pdf ou txt
Vous aimerez peut-être aussi
- Chaudiere Devis Facture GalDocument4 pagesChaudiere Devis Facture GalREAL SMSPas encore d'évaluation
- Arduino Avec Mblock ! - HP-Formations 1Document7 pagesArduino Avec Mblock ! - HP-Formations 1Adel FehriPas encore d'évaluation
- A Le Robot Suiveur de Ligne V4Document2 pagesA Le Robot Suiveur de Ligne V4Christophe Minutolo100% (3)
- Chapitre 02 PCB Conception Et Fabrication Circuits ImprimésDocument15 pagesChapitre 02 PCB Conception Et Fabrication Circuits Imprimésinstru MentationPas encore d'évaluation
- FreeCAD | étape par étape: Apprenez à créer des objets 3D, des assemblages et des dessins techniquesD'EverandFreeCAD | étape par étape: Apprenez à créer des objets 3D, des assemblages et des dessins techniquesPas encore d'évaluation
- Mblock ArduinoDocument23 pagesMblock ArduinoMohamed Amine MnassriPas encore d'évaluation
- Ardublock-Telecommande IrDocument2 pagesArdublock-Telecommande IrSamen LempirePas encore d'évaluation
- Info Embarquée Correction Partie 1Document4 pagesInfo Embarquée Correction Partie 1J PPas encore d'évaluation
- Chapitre 6 Programmation D'une Carte Commande PubDocument6 pagesChapitre 6 Programmation D'une Carte Commande PubTelli TarekPas encore d'évaluation
- SyntheseDocument3 pagesSyntheseAbdo GuezriPas encore d'évaluation
- Cours - Technologie Représentation Fonctionnelle D'un Système Technique - 1ère As (2014-2015) MR Rafik Ben AmorDocument4 pagesCours - Technologie Représentation Fonctionnelle D'un Système Technique - 1ère As (2014-2015) MR Rafik Ben AmorFaïssolath AchirouPas encore d'évaluation
- Capteurs Et Actionneurs ExercicesDocument1 pageCapteurs Et Actionneurs Exercicesbatmat 1492Pas encore d'évaluation
- Ardublock Education - 1.3Document7 pagesArdublock Education - 1.3Nadia SahliPas encore d'évaluation
- Cahier 1AS - Soudani Sami 2023Document51 pagesCahier 1AS - Soudani Sami 2023hello youPas encore d'évaluation
- Formation Arduino TP 1Document2 pagesFormation Arduino TP 1Philippe MorinPas encore d'évaluation
- TPE-Projet Feu TricoloreDocument4 pagesTPE-Projet Feu TricoloreKyàà SeckPas encore d'évaluation
- اختبارات اللغة الفرنسية للسنة الثالثة ابتدائي الجيل الثاني للفصل الثاني موقع المنارة التعليمي PDFDocument1 pageاختبارات اللغة الفرنسية للسنة الثالثة ابتدائي الجيل الثاني للفصل الثاني موقع المنارة التعليمي PDFHakim Benmajid100% (1)
- Technologie UNITE DE BOUCHAGE DES BOUTEILLES DE LAIT - 2ème Sciences (2011-2012) MR Walid (Full Permission)Document5 pagesTechnologie UNITE DE BOUCHAGE DES BOUTEILLES DE LAIT - 2ème Sciences (2011-2012) MR Walid (Full Permission)Kamel TayahiPas encore d'évaluation
- Cour 1 PDFDocument17 pagesCour 1 PDFsalwa BDPas encore d'évaluation
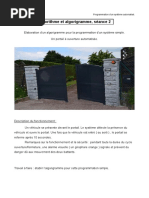
- Algorigramme PortailDocument2 pagesAlgorigramme Portailbatmat 1492Pas encore d'évaluation
- Ardu BlockDocument1 pageArdu BlockarduidevPas encore d'évaluation
- Fonction Alimenter Energie Électrique N.L.techNIQUE PROF S.charIDocument4 pagesFonction Alimenter Energie Électrique N.L.techNIQUE PROF S.charIAymen HssainiPas encore d'évaluation
- Prise en Mains Mblock 5Document26 pagesPrise en Mains Mblock 5ABD EL HADI EL MAKKIOUIPas encore d'évaluation
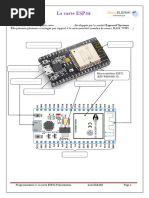
- Partie2 - Carte Esp32 - Presentation - EleveDocument2 pagesPartie2 - Carte Esp32 - Presentation - EleveSami Smout50% (2)
- TP1et2 ARDUINODocument20 pagesTP1et2 ARDUINONidhal ARFAOUIPas encore d'évaluation
- SujetDocument5 pagesSujetNicolas ManginPas encore d'évaluation
- MC MblockDocument13 pagesMC MblockMontassar BoujlelPas encore d'évaluation
- TP CE Et CI Store Automatique 2020Document3 pagesTP CE Et CI Store Automatique 2020petchyPas encore d'évaluation
- Correction de 4P04.1 - Découverte Des OrganigrammeDocument13 pagesCorrection de 4P04.1 - Découverte Des Organigrammeayoub nailiPas encore d'évaluation
- Devoir 1 Modele 3 Si 2 Bac SM B Semestre 2Document6 pagesDevoir 1 Modele 3 Si 2 Bac SM B Semestre 2lemsouguerPas encore d'évaluation
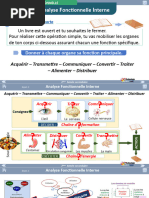
- 1 Nalyse Onctionnelle NterneDocument37 pages1 Nalyse Onctionnelle NterneTAYOKUITCHE GillesArnaudPas encore d'évaluation
- Cours CAN - CNA (Elève) FiltageDocument13 pagesCours CAN - CNA (Elève) FiltageAnonymous PKdzRZ7Pas encore d'évaluation
- Cours D'algorithme Et Langage Chap1&2Document10 pagesCours D'algorithme Et Langage Chap1&2Pacome ChedePas encore d'évaluation
- Brevet Blanc Corrige GyropodeDocument5 pagesBrevet Blanc Corrige Gyropodegildas assoumou allogoPas encore d'évaluation
- Chaine EnergieDocument5 pagesChaine EnergiezazamoteurPas encore d'évaluation
- Module 1 Analyse Fonctionnelle SMB PDFDocument44 pagesModule 1 Analyse Fonctionnelle SMB PDFNejah JEMALPas encore d'évaluation
- Devoir de Synthese N°1: PrésentationDocument6 pagesDevoir de Synthese N°1: PrésentationSaifeddine BrikiPas encore d'évaluation
- Arduino-Cahier 2AS - Soudani Sami 2023Document9 pagesArduino-Cahier 2AS - Soudani Sami 2023KarimPas encore d'évaluation
- Carnet Tuxbot BasicDocument24 pagesCarnet Tuxbot BasicJalila BaliPas encore d'évaluation
- Je Decouvre L'ordinateurDocument1 pageJe Decouvre L'ordinateurStaphanie MelPas encore d'évaluation
- Cours 3 - Chapitre III - Jeux D - Instructions - 2020 PDFDocument35 pagesCours 3 - Chapitre III - Jeux D - Instructions - 2020 PDFboujemaa SAADATPas encore d'évaluation
- Code de Arduino Pour Un Capteur de Gaz - Google SearchDocument1 pageCode de Arduino Pour Un Capteur de Gaz - Google SearchLllPas encore d'évaluation
- Chaine D'énergie-ConvertiDocument9 pagesChaine D'énergie-ConvertiNidhal AmariPas encore d'évaluation
- Cours - Génie Électrique Microcontrôleur 16f84a - Bac Technique (2012-2013) MR AïssaDocument11 pagesCours - Génie Électrique Microcontrôleur 16f84a - Bac Technique (2012-2013) MR AïssaRaja Tě JazziriPas encore d'évaluation
- Mbot-05 5emeDocument6 pagesMbot-05 5emeben sassi0% (1)
- Suiveur de Ligne PDFDocument20 pagesSuiveur de Ligne PDFBilel DekhiliPas encore d'évaluation
- Afficheur LCDDocument5 pagesAfficheur LCDmatacaohdPas encore d'évaluation
- Fonction AcquérirDocument3 pagesFonction AcquérirMustapha EssalhiPas encore d'évaluation
- DEVOIR DE Controle N1-2AS-2023Document4 pagesDEVOIR DE Controle N1-2AS-2023mohamed sedki chebbi100% (1)
- I U G É T: TPN 1: Synthèse Des Capteurs ArduinoDocument7 pagesI U G É T: TPN 1: Synthèse Des Capteurs ArduinoFotcha EricPas encore d'évaluation
- DC1-1AS-page 1.2.3-2022Document3 pagesDC1-1AS-page 1.2.3-2022you lemPas encore d'évaluation
- Chap. III: Automate Programmable Industriel (API) : AutomatismeDocument27 pagesChap. III: Automate Programmable Industriel (API) : Automatismeimane elmamoune100% (1)
- Cours Robotique0Document21 pagesCours Robotique0KOUASSI SALOMONPas encore d'évaluation
- Chaine Information Et Chaine Energie CoursDocument2 pagesChaine Information Et Chaine Energie CoursAya BOUSSEROUELPas encore d'évaluation
- Alarme IncendieDocument2 pagesAlarme IncendieFatma Ezzahra RzigaPas encore d'évaluation
- D-BE-MCHA Programmation Mblock 03.2019 060330Document33 pagesD-BE-MCHA Programmation Mblock 03.2019 060330Ssantrino OnirtnassPas encore d'évaluation
- Projets Arduino avec Tinkercad: Concevoir et programmer des projets électroniques basés sur Arduino avec TinkercadD'EverandProjets Arduino avec Tinkercad: Concevoir et programmer des projets électroniques basés sur Arduino avec TinkercadPas encore d'évaluation
- Nouveau Présentation Microsoft Office PowerPointDocument46 pagesNouveau Présentation Microsoft Office PowerPointTabka SouheilPas encore d'évaluation
- TP #2: Applications À Base D'arduino: Projet de Fin de CycleDocument4 pagesTP #2: Applications À Base D'arduino: Projet de Fin de CycleBobby StayPas encore d'évaluation
- Prise en Main Carte Arduino Langage ArduinoDocument9 pagesPrise en Main Carte Arduino Langage ArduinoA RevoirPas encore d'évaluation
- Cours de Technique de Conceptions Des Systèmes ProgrammablesDocument47 pagesCours de Technique de Conceptions Des Systèmes Programmableslumieredumonde765Pas encore d'évaluation
- Sept Exercices Assez Simples Sur Les Fonctions en TerminaleDocument2 pagesSept Exercices Assez Simples Sur Les Fonctions en TerminaleMBADJOUN Daniel100% (1)
- Carlos - Communiqué Pour Jury D'audition de Thèse PH.DDocument1 pageCarlos - Communiqué Pour Jury D'audition de Thèse PH.DMBADJOUN DanielPas encore d'évaluation
- These 1 Manuscrit Thèse Jingjing FinalDocument165 pagesThese 1 Manuscrit Thèse Jingjing FinalMBADJOUN DanielPas encore d'évaluation
- Cours Fortran 77Document238 pagesCours Fortran 77MBADJOUN DanielPas encore d'évaluation
- TD02Document4 pagesTD02MBADJOUN DanielPas encore d'évaluation
- Roblème Endomorphisme de Différences Finies Polynômes Factoriels Et Polynômes de ErnoulliDocument5 pagesRoblème Endomorphisme de Différences Finies Polynômes Factoriels Et Polynômes de ErnoulliMBADJOUN DanielPas encore d'évaluation
- Série RFD TranslaDocument3 pagesSérie RFD TranslaMBADJOUN Daniel100% (2)
- Cours Installation Electrique 2 Eme AnneDocument54 pagesCours Installation Electrique 2 Eme AnneMBADJOUN Daniel100% (1)
- TP Sur Les EnregistrementsDocument2 pagesTP Sur Les EnregistrementsMBADJOUN DanielPas encore d'évaluation
- Chapitre 3 Les Structures Algo de Controle Et ItérativesDocument8 pagesChapitre 3 Les Structures Algo de Controle Et ItérativesMBADJOUN DanielPas encore d'évaluation
- TD 1 Sur MAODocument4 pagesTD 1 Sur MAOMBADJOUN DanielPas encore d'évaluation
- Chapitre 1Document5 pagesChapitre 1MBADJOUN DanielPas encore d'évaluation
- TD Intr MicroproDocument3 pagesTD Intr MicroproMBADJOUN DanielPas encore d'évaluation
- TH A Se Mohamed MansouriDocument224 pagesTH A Se Mohamed MansouriMBADJOUN DanielPas encore d'évaluation
- CoursDocument36 pagesCoursMBADJOUN DanielPas encore d'évaluation
- 50 Chapitre 5 - La Programmation en Assembleur Du Microprocesseur 8086Document33 pages50 Chapitre 5 - La Programmation en Assembleur Du Microprocesseur 8086MBADJOUN DanielPas encore d'évaluation
- Algorithmique Et Programmation Pascal: Emilie MORVANTDocument2 pagesAlgorithmique Et Programmation Pascal: Emilie MORVANTMBADJOUN DanielPas encore d'évaluation
- Article AgHBsDocument20 pagesArticle AgHBsRodrigue GouajeuPas encore d'évaluation
- Support Et ResistanceDocument11 pagesSupport Et Resistanceemmanuel nkemyPas encore d'évaluation
- bienfaits du travailDocument1 pagebienfaits du travailAbidi AbidiPas encore d'évaluation
- PHD Thesis - Jean-Luc Kouassi - FinalDocument249 pagesPHD Thesis - Jean-Luc Kouassi - FinalBrou Guillaume KOUASSIPas encore d'évaluation
- Cours de Physiologie Respiratoire 2Document68 pagesCours de Physiologie Respiratoire 2Christ StewPas encore d'évaluation
- Dossier Bid Maroc WC26Document17 pagesDossier Bid Maroc WC26chaymae.zar01Pas encore d'évaluation
- CMTN000317900 01 PDFDocument24 pagesCMTN000317900 01 PDFscribdPas encore d'évaluation
- Fiche 8Document6 pagesFiche 8essadik hananePas encore d'évaluation
- Résumé de La LF 2024Document14 pagesRésumé de La LF 2024Abdelhakim Fallatte100% (1)
- Gimai Seikatsu Vol 2 (1)Document217 pagesGimai Seikatsu Vol 2 (1)shadoweleanor195Pas encore d'évaluation
- CG RapportDocument15 pagesCG Rapportkenz.boumadianePas encore d'évaluation
- Théâtre Immersif - WikipédiaDocument4 pagesThéâtre Immersif - WikipédiaRédaBouamaraPas encore d'évaluation
- M1_P13_MIEI_2019Document39 pagesM1_P13_MIEI_2019zakariae.douichiPas encore d'évaluation
- DZ NP Sikadur 41 emDocument3 pagesDZ NP Sikadur 41 emfaridPas encore d'évaluation
- Lecon Pratique EbaleDocument8 pagesLecon Pratique EbaleDarhel BirovaPas encore d'évaluation
- Note de Calculs Buse Fi800Document6 pagesNote de Calculs Buse Fi800Francis Zenwan Asouan Dessoigny100% (2)
- Angles Avec Geogebra 3 Cercle Divisee en Cinq Parties EgalesDocument2 pagesAngles Avec Geogebra 3 Cercle Divisee en Cinq Parties EgalesElmehdi OuarradPas encore d'évaluation
- Les Alcéne en Milieu Industriel 2Document7 pagesLes Alcéne en Milieu Industriel 2MOUNSIFPas encore d'évaluation
- Ext 90Document22 pagesExt 90Jilani OsmanePas encore d'évaluation
- Justice Prédictive JPJ Maroc 2018Document30 pagesJustice Prédictive JPJ Maroc 2018Hajar RhaniPas encore d'évaluation
- Accompagnement Palier 1 2006Document55 pagesAccompagnement Palier 1 2006api-3844239100% (1)
- Les Structures de DonnéesDocument6 pagesLes Structures de Donnéesa7mid7ilmiPas encore d'évaluation
- TD CIN Graphique - Pompe A PetroleDocument3 pagesTD CIN Graphique - Pompe A PetroleMouhcine Ben MoussaPas encore d'évaluation
- Devoir - Mariama BA - TSDocument2 pagesDevoir - Mariama BA - TSAhmadou Gueye SallPas encore d'évaluation
- Cejm Thème 1-Chap 5 EleveDocument17 pagesCejm Thème 1-Chap 5 Elevehugoroger82170Pas encore d'évaluation
- Leboncoin Bon-D-EnvoiDocument1 pageLeboncoin Bon-D-EnvoiLucas GalluffoPas encore d'évaluation
- W01 Tube Et Sonde PiezometriqueDocument1 pageW01 Tube Et Sonde PiezometriqueAmira Mira MiritaPas encore d'évaluation
- Manuel Neoh Expresso 10l 230518 PDFDocument84 pagesManuel Neoh Expresso 10l 230518 PDFykmail0582Pas encore d'évaluation
- SICABLE CI - Rapport D'activités Du 1er Semestre 2021 - 2021-09-24Document1 pageSICABLE CI - Rapport D'activités Du 1er Semestre 2021 - 2021-09-24Ange Yohan Desvallees NdriPas encore d'évaluation