TD3 Python
TD3 Python
Télécharger au format pdf ou txt
Vous aimerez peut-être aussi
- Exerices QT Designer Corrigés: ExempleDocument7 pagesExerices QT Designer Corrigés: ExemplePROF PROF100% (3)
- exercices - Corrig - S - Marketing - Doc Filename - UTF-8''Exercices Corrigés MarketingDocument37 pagesexercices - Corrig - S - Marketing - Doc Filename - UTF-8''Exercices Corrigés Marketingالقدميري لطيفة100% (1)
- Circuit LogiqueDocument91 pagesCircuit Logiqueleibniz100% (10)
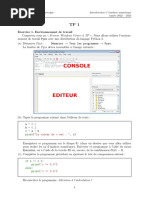
- TP 1Document3 pagesTP 1hùng hoàngPas encore d'évaluation
- Enonce TME1 Et 2Document6 pagesEnonce TME1 Et 2Izzadine Alkhali MassarPas encore d'évaluation
- TP 11Document2 pagesTP 11BilelbhPas encore d'évaluation
- TD Numpy Matplotli CorrigéDocument6 pagesTD Numpy Matplotli CorrigécadrolsnPas encore d'évaluation
- TP 1 Informatique IndustrielleDocument6 pagesTP 1 Informatique IndustrielleOlympe AÏGBEDEPas encore d'évaluation
- Scratch 8eme Sur Le StyloDocument12 pagesScratch 8eme Sur Le StyloLamiss GhoulPas encore d'évaluation
- CPGE TP1 InfoDocument4 pagesCPGE TP1 Infoabalde0506Pas encore d'évaluation
- Ch1 Notation ScientifiqueDocument8 pagesCh1 Notation Scientifiquesylla.abdoulaye1Pas encore d'évaluation
- Cours Algorithmes Et MathematiquesDocument32 pagesCours Algorithmes Et Mathematiquesrenaud thoby sassouPas encore d'évaluation
- TP 1 Méca Init MatlabDocument5 pagesTP 1 Méca Init MatlabLinda SadiPas encore d'évaluation
- Cours Algorithmique Et Programmation en CDocument61 pagesCours Algorithmique Et Programmation en CmarwitosPas encore d'évaluation
- 1 SRI TD1 - AlgoDocument3 pages1 SRI TD1 - Algostef stefPas encore d'évaluation
- Animation MapleDocument23 pagesAnimation MapleAchraf SOUNNIPas encore d'évaluation
- Série N°6 2013 2014 (Hichem Kemali) (Pilote Médenine)Document4 pagesSérie N°6 2013 2014 (Hichem Kemali) (Pilote Médenine)Khouloud Bjaoui BouzidiPas encore d'évaluation
- TP1 Scilab 2023 2024 L3 TopoDocument4 pagesTP1 Scilab 2023 2024 L3 Toporahmandiaye654Pas encore d'évaluation
- Exo PythonDocument27 pagesExo PythonEric Lefrançais100% (1)
- TP_SemaphoreDocument2 pagesTP_SemaphoreChaabane BoussadiaPas encore d'évaluation
- TP1 - Traitement - Du - Signal - MasterDocument5 pagesTP1 - Traitement - Du - Signal - MasterFatima Zohra ESSAKHAIRY100% (2)
- TP1 Initiation PythonDocument6 pagesTP1 Initiation PythonBassirou SeckPas encore d'évaluation
- TP 9Document2 pagesTP 9BilelbhPas encore d'évaluation
- TP 2: Fonctions en Python: I Rappels Sur Les Repr Esentations GraphiquesDocument3 pagesTP 2: Fonctions en Python: I Rappels Sur Les Repr Esentations Graphiquesladabd2Pas encore d'évaluation
- TP1 CPPDocument3 pagesTP1 CPPTef ElbertPas encore d'évaluation
- TP 4 MatlabDocument4 pagesTP 4 Matlab-the queen-Pas encore d'évaluation
- Exo ExamDocument8 pagesExo Exammouad mouradPas encore d'évaluation
- Matlab TP4Document3 pagesMatlab TP4OG Brian100% (1)
- Initiation A MatlabDocument22 pagesInitiation A MatlabDemba KeitaPas encore d'évaluation
- TDS 2021 2022 EtudiantsDocument12 pagesTDS 2021 2022 EtudiantsHuy NguyễnPas encore d'évaluation
- Projet Chef D'oeuvre DIARRA MackyDocument66 pagesProjet Chef D'oeuvre DIARRA MackyMarx Assi100% (1)
- Poly TP Maths 2023 2024Document49 pagesPoly TP Maths 2023 2024Abdelhamid Dakir-AllahPas encore d'évaluation
- TP Methode NumériqueDocument29 pagesTP Methode NumériqueJojo NadjouaPas encore d'évaluation
- ExosDocument12 pagesExosPROF PROFPas encore d'évaluation
- MAT 2910 H24 Devoir1Document4 pagesMAT 2910 H24 Devoir1charlinicolasPas encore d'évaluation
- TP N°1Document5 pagesTP N°1soum12311Pas encore d'évaluation
- Cours Python - L2 ECODocument49 pagesCours Python - L2 ECORosie grewongoPas encore d'évaluation
- TP1-TS2027Document14 pagesTP1-TS2027Miguel KORGOPas encore d'évaluation
- Rapport Du MatlabDocument12 pagesRapport Du Matlabheyoubro69Pas encore d'évaluation
- Algebre TPDocument19 pagesAlgebre TPAnas KartaouiPas encore d'évaluation
- TP8 SujetDocument10 pagesTP8 SujetZak KeroumPas encore d'évaluation
- TP 12 Methodes Numeriques Ns444 l2 ElnDocument6 pagesTP 12 Methodes Numeriques Ns444 l2 ElnHadjaidjiPas encore d'évaluation
- Support TPDocument14 pagesSupport TPlimouna999Pas encore d'évaluation
- TP Listes FonctionsDocument7 pagesTP Listes FonctionsReda BaddyPas encore d'évaluation
- La Programmation en Langage CDocument190 pagesLa Programmation en Langage CClubTutorielInformatique100% (2)
- sous_programmeDocument3 pagessous_programmeZaghbani HabibPas encore d'évaluation
- 3SC RappelDocument3 pages3SC RappelMd infoPas encore d'évaluation
- Cours MPSIDocument136 pagesCours MPSIParrot AudreyPas encore d'évaluation
- Devoir de Controle: ECUE: Algorithmique &programmation Classe(s) : L1-INFO 1 À 5Document2 pagesDevoir de Controle: ECUE: Algorithmique &programmation Classe(s) : L1-INFO 1 À 5gw9yql69Pas encore d'évaluation
- La Programmation en Ansi-CDocument190 pagesLa Programmation en Ansi-CClubTutorielInformatiquePas encore d'évaluation
- ISTAMA2022 - TD - Algo Et Prog - GSI2-GL2Document3 pagesISTAMA2022 - TD - Algo Et Prog - GSI2-GL2konéPas encore d'évaluation
- Serie de Revision 3sc Octobre 2022Document9 pagesSerie de Revision 3sc Octobre 2022fradj hediPas encore d'évaluation
- Projet MatlabDocument13 pagesProjet Matlabsetouanimaghrib159Pas encore d'évaluation
- Signaux Matlab2Document79 pagesSignaux Matlab2Ayoub AmriPas encore d'évaluation
- TP3 2018Document6 pagesTP3 2018mcbenmahdiPas encore d'évaluation
- Poo 1 TD1&2Document4 pagesPoo 1 TD1&2instagram comPas encore d'évaluation
- Exercice 1:: TD 3: Les Structures ItérativesDocument2 pagesExercice 1:: TD 3: Les Structures Itérativestco7f1bzcfzadnx580oPas encore d'évaluation
- Fortran TPDocument3 pagesFortran TPRashyd_Zaaboul_1075Pas encore d'évaluation
- 2019 3i026 Examen Session 1Document3 pages2019 3i026 Examen Session 1itchirmaissaPas encore d'évaluation
- Info C ProblemesDocument61 pagesInfo C Problemesshaymaeee100% (3)
- Suppression des lignes cachées: Dévoiler l'invisible : les secrets de la vision par ordinateurD'EverandSuppression des lignes cachées: Dévoiler l'invisible : les secrets de la vision par ordinateurPas encore d'évaluation
- Algorithme de dessin de ligne: Maîtriser les techniques de rendu d’images de précisionD'EverandAlgorithme de dessin de ligne: Maîtriser les techniques de rendu d’images de précisionPas encore d'évaluation
- TP2 Crypto.1.5Document4 pagesTP2 Crypto.1.5Tristan DelplacePas encore d'évaluation
- Dut TPDocument11 pagesDut TPTristan DelplacePas encore d'évaluation
- CP Le Pass Culture Renforce Son Offre de Presse en LigneDocument1 pageCP Le Pass Culture Renforce Son Offre de Presse en LigneTristan DelplacePas encore d'évaluation
- Entrainement PythonDocument40 pagesEntrainement PythonTristan DelplacePas encore d'évaluation
- IP1 Python Cours TD 5 6Document12 pagesIP1 Python Cours TD 5 6Tristan DelplacePas encore d'évaluation
- Memento ASR3Document21 pagesMemento ASR3Tristan DelplacePas encore d'évaluation
- M22 Forces CentralesDocument12 pagesM22 Forces CentralesTristan DelplacePas encore d'évaluation
- Eco Conception MecanicienDocument51 pagesEco Conception MecanicienTristan DelplacePas encore d'évaluation
- Victor Hugo Les MiserablesDocument2 pagesVictor Hugo Les MiserablesTristan DelplacePas encore d'évaluation
- tds1 Ppe342Document2 pagestds1 Ppe342zt5tp2brsvPas encore d'évaluation
- 02 Ep2Document6 pages02 Ep2Zouhair AbouchPas encore d'évaluation
- Repartitions SecondaireDocument20 pagesRepartitions SecondaireAliBenMassoudPas encore d'évaluation
- CH 2Document43 pagesCH 2khadijaPas encore d'évaluation
- GP Maths 3eme 20 Juillet FinalDocument41 pagesGP Maths 3eme 20 Juillet FinalBachir KanePas encore d'évaluation
- CCP 2011 MP m2 CorrigeDocument6 pagesCCP 2011 MP m2 Corrigesemeh sghaierPas encore d'évaluation
- Examens 2BAC SP MécaniqueDocument2 pagesExamens 2BAC SP Mécaniquenoursanae685Pas encore d'évaluation
- Polycopie Pompage Des Fluides Ladouani PDFDocument72 pagesPolycopie Pompage Des Fluides Ladouani PDFtatif barca100% (1)
- CHAPITRE 3 Les Transformations IntegralesDocument33 pagesCHAPITRE 3 Les Transformations IntegralesIshak KETTAFPas encore d'évaluation
- ENSP Licence Physique 2014Document11 pagesENSP Licence Physique 2014Ezekiel TakaPas encore d'évaluation
- Cours Algo 2009Document109 pagesCours Algo 2009Claude TraPas encore d'évaluation
- Chapitre V Les Méthodes D'estimation (PDF) Chapitre V Les Méthodes D'estimation Mouridsmida Files Wordpress Chap Les Muethodes Destimation Du Cout Dun Projet PDF DownloadDocument4 pagesChapitre V Les Méthodes D'estimation (PDF) Chapitre V Les Méthodes D'estimation Mouridsmida Files Wordpress Chap Les Muethodes Destimation Du Cout Dun Projet PDF DownloadHassen HadirPas encore d'évaluation
- Les Accidents de TravailDocument9 pagesLes Accidents de TravailZeroualPas encore d'évaluation
- TD VHDL n1 - ADocument2 pagesTD VHDL n1 - Amissaoui nadjlaPas encore d'évaluation
- Cours Edp09Document126 pagesCours Edp09tznxtrdbhyPas encore d'évaluation
- ISEMath 2018 CDocument20 pagesISEMath 2018 CFabrice EwoloPas encore d'évaluation
- TD MNPT CorrigéDocument21 pagesTD MNPT Corrigéayoube mecaPas encore d'évaluation
- Abaques de Flexion Composee 1982 Cle74a3e5Document94 pagesAbaques de Flexion Composee 1982 Cle74a3e5Amine BENYAHIAPas encore d'évaluation
- Longueurs Et Périmètres 15042020 Après Plantage Corrigé Complet Revu 09042023Document7 pagesLongueurs Et Périmètres 15042020 Après Plantage Corrigé Complet Revu 09042023dubocPas encore d'évaluation
- 04-2-Fonctions de Logique CombinatoireDocument14 pages04-2-Fonctions de Logique CombinatoireFosseni DialloPas encore d'évaluation
- Cours - de - Mécanique - Appliquée - 1 - SJP-1 - 2016-2017Document47 pagesCours - de - Mécanique - Appliquée - 1 - SJP-1 - 2016-2017Astrid Jizreel100% (1)
- Analyse VectorielleDocument4 pagesAnalyse VectorielleOrdinateur Neuf Accessoire CamerounPas encore d'évaluation
- Chapitre 3 Traction Et CompressionDocument7 pagesChapitre 3 Traction Et CompressionVadèle PrincessePas encore d'évaluation
- TD 2Document4 pagesTD 2Said Ezzorkani100% (2)
- Système de Gestion de Base de DonnéesDocument334 pagesSystème de Gestion de Base de DonnéesIssam Wandal100% (1)
- Geotech160018 PDFDocument5 pagesGeotech160018 PDFMustapha DaddiPas encore d'évaluation
- Chapitre 2 - Caractéristiques Des Sections PlanesDocument16 pagesChapitre 2 - Caractéristiques Des Sections PlanesbayouloudafneyPas encore d'évaluation
- Les Tris - Version 1Document23 pagesLes Tris - Version 1badreddtPas encore d'évaluation
- TP3 ShellsDocument10 pagesTP3 ShellsShayMaPas encore d'évaluation