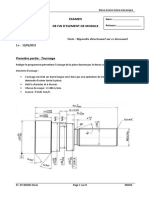
Colle - 2 - Sujet
Colle - 2 - Sujet
Télécharger au format pdf ou txt
Vous aimerez peut-être aussi
- La Différenciation Pédagogique de Louis Legrand, 1986.Document5 pagesLa Différenciation Pédagogique de Louis Legrand, 1986.Leonardo S de Sá Souza100% (1)
- Colle - 1 - SujetDocument4 pagesColle - 1 - SujetMarieme BoutraihPas encore d'évaluation
- (AnaHSLCI) (TD) Bras de Robot A Muscles Artificiels PDFDocument8 pages(AnaHSLCI) (TD) Bras de Robot A Muscles Artificiels PDFkamalPas encore d'évaluation
- Théorie et conception des filtres analogiques, 2e édition: Avec MatlabD'EverandThéorie et conception des filtres analogiques, 2e édition: Avec MatlabPas encore d'évaluation
- Corr DS RDM1 2017-2018Document3 pagesCorr DS RDM1 2017-2018Wael Ben SalemPas encore d'évaluation
- Chapitre 6 - La TorsionDocument19 pagesChapitre 6 - La TorsionBadr-eddineBounouPas encore d'évaluation
- TD N°5 CaoiiDocument1 pageTD N°5 Caoiielking gingstarsPas encore d'évaluation
- Ci3 TDDocument5 pagesCi3 TDNibrasse Saidani100% (2)
- TP1 PDFDocument5 pagesTP1 PDFNasrineBoukarouraPas encore d'évaluation
- CR TP1 Sabrine&Tarek GI2B G2Document5 pagesCR TP1 Sabrine&Tarek GI2B G2Tarek KlaiPas encore d'évaluation
- الإمتحان الوطني الموحد للبكالوريا الدورة العادية 2012 مادة علوم المهندس شعبة العلوم الرياضية بDocument19 pagesالإمتحان الوطني الموحد للبكالوريا الدورة العادية 2012 مادة علوم المهندس شعبة العلوم الرياضية بAli AmaraPas encore d'évaluation
- TD 6 MP 22 - 23 CorrigéDocument7 pagesTD 6 MP 22 - 23 CorrigéThe Wolf TVPas encore d'évaluation
- TD 5 CN - L3 TélécomDocument5 pagesTD 5 CN - L3 TélécomHouda SenoussiPas encore d'évaluation
- Examen Corrige Mna Methodes Numeriques AppliquesDocument5 pagesExamen Corrige Mna Methodes Numeriques AppliqueswissemzogPas encore d'évaluation
- Technologie Asservissement-Préparation Agreg InterneDocument179 pagesTechnologie Asservissement-Préparation Agreg InterneOmom chamarohPas encore d'évaluation
- Chapitre 0 Rappels Robotique PDFDocument63 pagesChapitre 0 Rappels Robotique PDFPaulHochonPas encore d'évaluation
- Rapport D'activites EDST 2011Document24 pagesRapport D'activites EDST 2011Samir2020Pas encore d'évaluation
- Cours A.O.P ProfDocument13 pagesCours A.O.P ProfAMIRAFORTASPas encore d'évaluation
- Compte Rendu N°01 DMTDocument6 pagesCompte Rendu N°01 DMTGOUAL SaraPas encore d'évaluation
- TP RobotiqueDocument11 pagesTP Robotiquesouhil djoghlafPas encore d'évaluation
- La RobotiqueDocument19 pagesLa RobotiqueMBAREK SABARI100% (1)
- Theorie Des Mecanismes-CoursDocument14 pagesTheorie Des Mecanismes-CoursAli ArroudjPas encore d'évaluation
- Rapport Projet Pendule ELBIAD LAFNOUNEDocument28 pagesRapport Projet Pendule ELBIAD LAFNOUNEhhaddaPas encore d'évaluation
- Matlab Corrige PDFDocument4 pagesMatlab Corrige PDFIvana KenfackPas encore d'évaluation
- 03 CH03-01 Brushless V01Document25 pages03 CH03-01 Brushless V01Achref NajjarPas encore d'évaluation
- Compatibilité ÉlectromagnétiqueDocument15 pagesCompatibilité ÉlectromagnétiquesihemfarahPas encore d'évaluation
- (TDM) (CO) Theorie Des MecanismesDocument13 pages(TDM) (CO) Theorie Des MecanismesKhaled SouaissaPas encore d'évaluation
- Asservissement D'un Robot ParallèleDocument10 pagesAsservissement D'un Robot ParallèlelaracorpPas encore d'évaluation
- Bille en SuspensionDocument17 pagesBille en SuspensionAymen OmariPas encore d'évaluation
- CAM - Méc de Trans. de MVTDocument33 pagesCAM - Méc de Trans. de MVTMoslem ZariatPas encore d'évaluation
- TP1 Sujet PDFDocument4 pagesTP1 Sujet PDFImed BarçaPas encore d'évaluation
- Chapitre 1 - Robotique PDFDocument29 pagesChapitre 1 - Robotique PDFAbdou Kimm BinPas encore d'évaluation
- Compte Rendu tp1Document5 pagesCompte Rendu tp1Ilyass HajriPas encore d'évaluation
- Exposé Robot FixeDocument10 pagesExposé Robot FixeHadef AtefPas encore d'évaluation
- Cours NNDocument79 pagesCours NNHafsa El faidaPas encore d'évaluation
- Filliat RobotiqueMobile ENSTAParisTechDocument175 pagesFilliat RobotiqueMobile ENSTAParisTechRazzougui SarahPas encore d'évaluation
- Devoir17 18Document2 pagesDevoir17 18jihenkPas encore d'évaluation
- TP 1 - Doc Synthèse CorrigéDocument23 pagesTP 1 - Doc Synthèse CorrigéOumayma AssefraouiPas encore d'évaluation
- Paramétrage Denavitt HDocument23 pagesParamétrage Denavitt HAbbassi KarimPas encore d'évaluation
- EngrenageDocument73 pagesEngrenageaya zayriPas encore d'évaluation
- Barriere AutomatiqueDocument3 pagesBarriere AutomatiquematozoPas encore d'évaluation
- Moteur CCDocument6 pagesMoteur CCManuel ArzolaPas encore d'évaluation
- Chap 1Document21 pagesChap 1Karim BencheikhPas encore d'évaluation
- TD1 Section CritiqueDocument4 pagesTD1 Section CritiqueAhmed MinoPas encore d'évaluation
- Ch1 Init Rob1Document50 pagesCh1 Init Rob1Nada GhammemPas encore d'évaluation
- Chapitre 3Document24 pagesChapitre 3aminou050Pas encore d'évaluation
- Vib Long Barre WELKDocument27 pagesVib Long Barre WELKkarima ECHEFAJPas encore d'évaluation
- LP Mécatronique Stages 2 Mai 2017Document2 pagesLP Mécatronique Stages 2 Mai 2017benfatahPas encore d'évaluation
- Robotique: Enseignant: Jean-Philippe RobergeDocument45 pagesRobotique: Enseignant: Jean-Philippe RobergerabehvillaPas encore d'évaluation
- TP Electronique de BaseDocument38 pagesTP Electronique de BaseZaki El BousghyPas encore d'évaluation
- Cours MecaniqueDocument26 pagesCours MecaniqueMeryem JabranePas encore d'évaluation
- Sujet TD Robot ScaraDocument4 pagesSujet TD Robot Scaramed.amine.attiaPas encore d'évaluation
- 2a Tis Robotique Slides PDFDocument213 pages2a Tis Robotique Slides PDFSouhaib LoudaPas encore d'évaluation
- Série TD #2Document3 pagesSérie TD #2ZERARKA Mohamed FawziPas encore d'évaluation
- EXAMENCORRIGE2003 WWW - CoursDocument6 pagesEXAMENCORRIGE2003 WWW - Courskhaled kamel BouabdallahPas encore d'évaluation
- Formation - PDF - Robotique - MécatroniqueDocument5 pagesFormation - PDF - Robotique - Mécatroniqueirielouesther93Pas encore d'évaluation
- Boudhar LiesDocument152 pagesBoudhar LiesIui GhhbPas encore d'évaluation
- Opti Av Contr - PsDocument29 pagesOpti Av Contr - PsFayrouz DkhichiPas encore d'évaluation
- Polycopie CaoDocument45 pagesPolycopie CaoAymen HsPas encore d'évaluation
- Formation 3D par la pratique avec C#5 et WPF: Modeliser des moleculesD'EverandFormation 3D par la pratique avec C#5 et WPF: Modeliser des moleculesPas encore d'évaluation
- TEC3Document17 pagesTEC3Marieme Boutraih100% (1)
- Decroissance Radioactive Cours-IDocument28 pagesDecroissance Radioactive Cours-IMarieme Boutraih100% (1)
- Risque MécaniqueDocument32 pagesRisque MécaniqueMarieme Boutraih100% (1)
- Examen Mocn 12-01 - 2021Document8 pagesExamen Mocn 12-01 - 2021Marieme BoutraihPas encore d'évaluation
- Population Et Développement Au Maroc. Chapitre 9 - Initiatives Nationales, ONG Et Coopération Internationale PDFDocument60 pagesPopulation Et Développement Au Maroc. Chapitre 9 - Initiatives Nationales, ONG Et Coopération Internationale PDFMarieme BoutraihPas encore d'évaluation
- DpalettiseurDocument1 pageDpalettiseurMarieme BoutraihPas encore d'évaluation
- DP Force1718 Propagation-Des-Fissures NoelsDocument37 pagesDP Force1718 Propagation-Des-Fissures NoelsMarieme BoutraihPas encore d'évaluation
- Référentiel TCT & SMBDocument12 pagesRéférentiel TCT & SMBMarieme BoutraihPas encore d'évaluation
- Unité1 Dipole RCDocument25 pagesUnité1 Dipole RCMarieme Boutraih100% (1)
- Examen Des Travaux Pratiques de CAODocument1 pageExamen Des Travaux Pratiques de CAOMarieme BoutraihPas encore d'évaluation
- Mécanique Générale JCBône PDFDocument266 pagesMécanique Générale JCBône PDFMarieme BoutraihPas encore d'évaluation
- Analyse Fonctionnelle Et Structurelle - PalettiseurDocument9 pagesAnalyse Fonctionnelle Et Structurelle - PalettiseurMarieme Boutraih100% (1)
- Gestion de Stock 1 PDFDocument53 pagesGestion de Stock 1 PDFMarieme BoutraihPas encore d'évaluation
- 3 - Pertes de ChargeDocument12 pages3 - Pertes de ChargeMarieme Boutraih100% (1)
- THMOP - 05 ClimatiseurDocument3 pagesTHMOP - 05 ClimatiseurMarieme Boutraih100% (1)
- Colle - 4 - CorrectionDocument7 pagesColle - 4 - CorrectionMarieme BoutraihPas encore d'évaluation
- Colle - 3 - SujetDocument4 pagesColle - 3 - SujetMarieme BoutraihPas encore d'évaluation
- TP N°01: Sécurité Et Initiation À La Manipulation en ChimieDocument7 pagesTP N°01: Sécurité Et Initiation À La Manipulation en Chimieabir boublia100% (1)
- Strategic Management OfIT 1 WwwPearsonFrDocument37 pagesStrategic Management OfIT 1 WwwPearsonFranon-37150100% (1)
- A Holló Jegyében 3.Document344 pagesA Holló Jegyében 3.Inhumanus ÉnPas encore d'évaluation
- BAM - Lecture Analytique - Evaluer Les Mouches Rien Que Des MouchesDocument6 pagesBAM - Lecture Analytique - Evaluer Les Mouches Rien Que Des MouchesAyman BenkhdimPas encore d'évaluation
- French B Paper 2 Reading Comprehension Question Booklet SL FrenchDocument9 pagesFrench B Paper 2 Reading Comprehension Question Booklet SL FrenchSharaz RazaPas encore d'évaluation
- Rituel de Phrase 3èDocument2 pagesRituel de Phrase 3èvilatiago769Pas encore d'évaluation
- Chapitre 1 Ensembles Applications Relations BinairesDocument14 pagesChapitre 1 Ensembles Applications Relations BinairesYvann FitialalainaPas encore d'évaluation
- Formules de Politesse Selon LDocument4 pagesFormules de Politesse Selon LAmenPas encore d'évaluation
- DRG 2020 Version ConformeDocument63 pagesDRG 2020 Version Conformea.kouadria.ingtpPas encore d'évaluation
- TP2 Ing - BD L2CS S TPDocument3 pagesTP2 Ing - BD L2CS S TPEya HmidaPas encore d'évaluation
- Concert 24 Avril 2016Document7 pagesConcert 24 Avril 2016Gabriel WilliamPas encore d'évaluation
- Datasheet ELIOCAD 78216Document56 pagesDatasheet ELIOCAD 78216Vicente IraguenPas encore d'évaluation
- L'Ordre SS (Edwige Thibaut, 1991) PDFDocument672 pagesL'Ordre SS (Edwige Thibaut, 1991) PDFfreedom4aliens2682100% (1)
- Analyse Semique Pro Dalkare Cely TextDocument10 pagesAnalyse Semique Pro Dalkare Cely TextMia PetkovićPas encore d'évaluation
- 1AM FichesDocument129 pages1AM Fichesdadabena7Pas encore d'évaluation
- (Free Scores - Com) Granados Enrique Andaluza Andaluza 4605 155080Document1 page(Free Scores - Com) Granados Enrique Andaluza Andaluza 4605 155080javier ferrer gabardaPas encore d'évaluation
- Polycopié SVT Enseignante-Formation Des Roches Sédimentaires-2022-2023Document12 pagesPolycopié SVT Enseignante-Formation Des Roches Sédimentaires-2022-2023shibougriPas encore d'évaluation
- Escargots Snails Elevage SonghaiDocument16 pagesEscargots Snails Elevage SonghaiDjamil ReghidaPas encore d'évaluation
- Exercice 1 Constituants D'un RisqueDocument3 pagesExercice 1 Constituants D'un Risqueayoubelouarzazi01Pas encore d'évaluation
- Coloration de Ziehl Neelsen PDFDocument2 pagesColoration de Ziehl Neelsen PDFDesireePas encore d'évaluation
- Science 2Document10 pagesScience 2Bako HarounaPas encore d'évaluation
- Ds 8000 OverviewDocument23 pagesDs 8000 OverviewRP TripathiPas encore d'évaluation
- Les Besoins Fonctionnels Pour Un Site Web de CovoiturageDocument2 pagesLes Besoins Fonctionnels Pour Un Site Web de CovoiturageMohamed HasniPas encore d'évaluation
- PolyDocument98 pagesPolyGildas ASSOURIPas encore d'évaluation
- Définitions Et GénéralitésDocument6 pagesDéfinitions Et GénéralitésngouoPas encore d'évaluation
- RédactionDocument22 pagesRédactionDevs AbdouPas encore d'évaluation
- La MicrographieDocument14 pagesLa MicrographieJeanMartiness100% (1)
- LA NUTRITION MINERALE DES VEGETAUX LECON - Modif (1) .PpsDocument41 pagesLA NUTRITION MINERALE DES VEGETAUX LECON - Modif (1) .PpsMourad Ben HendaPas encore d'évaluation
- Activité Histoire Révolution FrançaiseDocument4 pagesActivité Histoire Révolution FrançaiseYhzpoe FekedelepePas encore d'évaluation