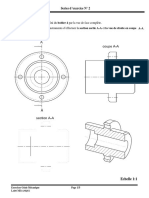
DT Sujet DS3 2023M
DT Sujet DS3 2023M
Télécharger au format pdf ou txt
Vous aimerez peut-être aussi
- Thermodynamique Exercices T4 - Second PrincipeDocument4 pagesThermodynamique Exercices T4 - Second PrincipeIhsan Mokhlisse100% (5)
- Elephant 23Document164 pagesElephant 23Titanius44440100% (1)
- Examen AutomatismeDocument5 pagesExamen AutomatismeKadjePas encore d'évaluation
- DT DS2 3ST 23 24Document7 pagesDT DS2 3ST 23 24Nejib JallouliPas encore d'évaluation
- DS2 2014 (DT)Document4 pagesDS2 2014 (DT)Bouabdellaoui saif ennasrPas encore d'évaluation
- Geometria Rotilor Renault SymbolDocument5 pagesGeometria Rotilor Renault SymbolSorin StanescuPas encore d'évaluation
- Devoir de Synthèse N°1 Système de Tronçonnage 2s4 2015-2016Document7 pagesDevoir de Synthèse N°1 Système de Tronçonnage 2s4 2015-2016عبد السميع بوعينPas encore d'évaluation
- DS2 DP 2020-2021Document4 pagesDS2 DP 2020-2021Saleh LaifiPas encore d'évaluation
- Etude D'un Système PluritechniqueDocument13 pagesEtude D'un Système PluritechniqueScofieldPas encore d'évaluation
- DS1-DT-Lavage PrepayeDocument10 pagesDS1-DT-Lavage PrepayeMouad MemniPas encore d'évaluation
- Sau To Com Copie1Document84 pagesSau To Com Copie1Florian CarnolPas encore d'évaluation
- Devoir Du 2ème Trimestre 2022Document5 pagesDevoir Du 2ème Trimestre 2022josias zinsou100% (1)
- 9 8 TD 4 Sujet PDFDocument5 pages9 8 TD 4 Sujet PDFDivin MakitaPas encore d'évaluation
- Série Déxercices API I - 240109 - 133104Document12 pagesSérie Déxercices API I - 240109 - 133104bridjettedonaPas encore d'évaluation
- Devoir de Synthese n1 2sc Lycee Bir Lahmar Azzabi Moez 2020 2021 1Document6 pagesDevoir de Synthese n1 2sc Lycee Bir Lahmar Azzabi Moez 2020 2021 1Zaied HaikelPas encore d'évaluation
- DC N°2 - 1ère - Unité de Percage Électromagnétique - 2020-2021Document3 pagesDC N°2 - 1ère - Unité de Percage Électromagnétique - 2020-2021Adam BensaidPas encore d'évaluation
- DT Copie1 4eme NRDocument6 pagesDT Copie1 4eme NRChokri Jaballi100% (1)
- Dt-Bac Blanc 2021 PDFDocument5 pagesDt-Bac Blanc 2021 PDFLabossef LabossefchedlyPas encore d'évaluation
- Poste Automatique de Sciage de Barre en AcierDocument3 pagesPoste Automatique de Sciage de Barre en Acierabdelghafour heriziPas encore d'évaluation
- Systeme Decoupage de BoisDocument2 pagesSysteme Decoupage de Boisyou lemPas encore d'évaluation
- DSC1 2ste Atc 2017 2018Document6 pagesDSC1 2ste Atc 2017 2018ismail elmoufakirPas encore d'évaluation
- Devoir de Synthèse N1 2AS Déc.2023Document16 pagesDevoir de Synthèse N1 2AS Déc.2023Sami BelhajPas encore d'évaluation
- Grafcet 1Document4 pagesGrafcet 1Ali ChourouPas encore d'évaluation
- VERSION FINALE D.Tech DS1 2019 2020Document3 pagesVERSION FINALE D.Tech DS1 2019 2020Bouabdellaoui saif ennasrPas encore d'évaluation
- Devoir de Synthèse N°2 2009 2010 (Baouicha)Document10 pagesDevoir de Synthèse N°2 2009 2010 (Baouicha)halim otmanePas encore d'évaluation
- 3-Devoir de Controle N1-2AS-2021Document5 pages3-Devoir de Controle N1-2AS-2021Rasmi BaananouPas encore d'évaluation
- Série Dexercices N°3 - Génie Électrique - GRAFCET Synchronisés - Bac Technique (2015-2016) MR Raouafi AbdallahDocument6 pagesSérie Dexercices N°3 - Génie Électrique - GRAFCET Synchronisés - Bac Technique (2015-2016) MR Raouafi AbdallahOumar BAPas encore d'évaluation
- Examauto 8Document11 pagesExamauto 8ak penPas encore d'évaluation
- Devoir-De-Synthèse-N°1 - 2022-2023 (Menzel-Jemil-Bizerte) 2Document10 pagesDevoir-De-Synthèse-N°1 - 2022-2023 (Menzel-Jemil-Bizerte) 2kcnhxs2rkm100% (1)
- Devoir de Synthese N°3: Disciplines TechniquesDocument4 pagesDevoir de Synthese N°3: Disciplines TechniquesJUSDOVIC EDJOZOMBIPas encore d'évaluation
- DT 4st 2024 Systeme DemballageDocument5 pagesDT 4st 2024 Systeme Demballagezied100% (1)
- DC1-3ST4 - 2018Document4 pagesDC1-3ST4 - 2018nagazi moezPas encore d'évaluation
- Devoir de Synthèse N°1 2012 2013 (Dhahri Salah)Document6 pagesDevoir de Synthèse N°1 2012 2013 (Dhahri Salah)Youssef CherniPas encore d'évaluation
- Examens Nationaux 2bac Sciences Technologies Electriques Si 2012 NormalDocument23 pagesExamens Nationaux 2bac Sciences Technologies Electriques Si 2012 Normalhicham raghaiPas encore d'évaluation
- Série .. ALI + Asservissement + HACHEURDocument3 pagesSérie .. ALI + Asservissement + HACHEURrzougarzougaPas encore d'évaluation
- TD N°6 Min PDFDocument2 pagesTD N°6 Min PDFSanda OumarouPas encore d'évaluation
- Devoir de Controle N1-2as-2022Document4 pagesDevoir de Controle N1-2as-2022Abdelhak GhodhbeniPas encore d'évaluation
- DT 3ST2 2024 Unité de MoulageDocument3 pagesDT 3ST2 2024 Unité de MoulageMehdi ToumiPas encore d'évaluation
- Mise en Équation D'un GRAFCET: Prénom NomDocument1 pageMise en Équation D'un GRAFCET: Prénom NomFatou ThiounePas encore d'évaluation
- Devoir de Synthèse N°1 - Technologie - 1ère AS (2015-2016) MR Abdallah RaouafiDocument6 pagesDevoir de Synthèse N°1 - Technologie - 1ère AS (2015-2016) MR Abdallah RaouafiAdel KmimechPas encore d'évaluation
- TD AutomatismesDocument8 pagesTD AutomatismesFarah MelkiPas encore d'évaluation
- Devoir de Synthèse N°1 - Génie Électrique - Bac Technique (2011-2012) MR Raouafi AbdallahDocument4 pagesDevoir de Synthèse N°1 - Génie Électrique - Bac Technique (2011-2012) MR Raouafi AbdallahFethi BenmassoudePas encore d'évaluation
- Devoir de Synthèse N°3 2015 2016 (MR Hadjkacem Abdelkarim)Document8 pagesDevoir de Synthèse N°3 2015 2016 (MR Hadjkacem Abdelkarim)ba WajihPas encore d'évaluation
- Devoir de Synthèse N°1 2011 2012 (Abdallah Raouafi)Document5 pagesDevoir de Synthèse N°1 2011 2012 (Abdallah Raouafi)Piere EbrahimPas encore d'évaluation
- Exercice1:: Jaune Gris Orange Rouge Marron Noir NoirDocument2 pagesExercice1:: Jaune Gris Orange Rouge Marron Noir NoirYoussef MenniPas encore d'évaluation
- Devoir de Contrôle N°2-2008 - 2009a (1) (Lycée Ben Othmen Ouslatia Kairouan)Document2 pagesDevoir de Contrôle N°2-2008 - 2009a (1) (Lycée Ben Othmen Ouslatia Kairouan)Lotfi Bouchareb100% (1)
- Rattrapage BAC 2019 Sciences de Lingénieur STMDocument11 pagesRattrapage BAC 2019 Sciences de Lingénieur STMAbderrazak Miassar100% (1)
- Bac Transbergeur - CPDFDocument18 pagesBac Transbergeur - CPDFElmostafa AchibanePas encore d'évaluation
- Dev3 - Shema Bac F3Document3 pagesDev3 - Shema Bac F3Daouda OUEDRAOGO100% (1)
- Devoir de Synthèse N°1 - Technologie - 1ère AS (2011-2012) MR Boubaker - Hassen PDFDocument6 pagesDevoir de Synthèse N°1 - Technologie - 1ère AS (2011-2012) MR Boubaker - Hassen PDFAmir AbidPas encore d'évaluation
- Devoir de Synthèse N°1 2015 2016 (MR Baazaoui Abderraouf)Document5 pagesDevoir de Synthèse N°1 2015 2016 (MR Baazaoui Abderraouf)Ahlem Rmida Ben HmidaPas encore d'évaluation
- Ds 2 Trim 3 Techmars 2012Document7 pagesDs 2 Trim 3 Techmars 2012Nidhal AbidiPas encore d'évaluation
- TP Electropneumatique TC 2023 AutoDocument7 pagesTP Electropneumatique TC 2023 Autoaltti bouayePas encore d'évaluation
- Devoir Hydrolyque PneumatiqueDocument2 pagesDevoir Hydrolyque PneumatiqueChaker Amir100% (1)
- Commandées Chacun Par Un Distributeur 5/2 À Pilotage Électrique) - OnDocument7 pagesCommandées Chacun Par Un Distributeur 5/2 À Pilotage Électrique) - OnYoussef YouriPas encore d'évaluation
- Poste Automatique de Peinture de Paraboles1Document5 pagesPoste Automatique de Peinture de Paraboles1Badreddine KraiemPas encore d'évaluation
- Devoir de Synthèse N°2 - Technologie - 1ère AS (2008-2009) Mme Toumi Imen Système Fraiseuse UniverselleDocument6 pagesDevoir de Synthèse N°2 - Technologie - 1ère AS (2008-2009) Mme Toumi Imen Système Fraiseuse UniverselleNadine JeghamPas encore d'évaluation
- N'est Autorisé Année MR:: Mise MarcheDocument5 pagesN'est Autorisé Année MR:: Mise MarchebejaouiPas encore d'évaluation
- Devoir de Synthèse N°1 - Génie Électrique - 3ème Technique (2012-2013) MR KhiariDocument5 pagesDevoir de Synthèse N°1 - Génie Électrique - 3ème Technique (2012-2013) MR KhiariAbidi Nawres0% (1)
- Devoir de Synthèse N°1 - Technologie Unité de Collage Des Étiquettes - 2ème Technique (2022-2023) MR KMIMECH AdelDocument7 pagesDevoir de Synthèse N°1 - Technologie Unité de Collage Des Étiquettes - 2ème Technique (2022-2023) MR KMIMECH AdelOumaima AbdelwahedPas encore d'évaluation
- Devoir de Contrôle N°1 - Technologie - 1ère AS Toutes Sections (2012-2013) MR Abdallah RAOUAFIDocument3 pagesDevoir de Contrôle N°1 - Technologie - 1ère AS Toutes Sections (2012-2013) MR Abdallah RAOUAFIChihab GhlalaPas encore d'évaluation
- Sujet TechniqueDocument96 pagesSujet TechniquetoumisoufienPas encore d'évaluation
- DC12016Dossier Réponses MécaniqueDocument4 pagesDC12016Dossier Réponses MécaniqueBouabdellaoui saif ennasrPas encore d'évaluation
- ActivitesDocument5 pagesActivitesBouabdellaoui saif ennasrPas encore d'évaluation
- DCN°3 3ScT 16-17 DTDocument3 pagesDCN°3 3ScT 16-17 DTBouabdellaoui saif ennasr100% (1)
- Devoir Corrigé de Synthèse N°3 - Génie Mécanique Unité Flexible D'usinage - Bac Technique (2011-2012) MR Ben Abdallah Marouan - 2Document15 pagesDevoir Corrigé de Synthèse N°3 - Génie Mécanique Unité Flexible D'usinage - Bac Technique (2011-2012) MR Ben Abdallah Marouan - 2Bouabdellaoui saif ennasrPas encore d'évaluation
- VERSION FINALE D.Tech DS1 2019 2020Document3 pagesVERSION FINALE D.Tech DS1 2019 2020Bouabdellaoui saif ennasrPas encore d'évaluation
- Correction TPDocument3 pagesCorrection TPBouabdellaoui saif ennasrPas encore d'évaluation
- Corrigé TP26Document4 pagesCorrigé TP26Bouabdellaoui saif ennasrPas encore d'évaluation
- DS3 - Dossier Technique - 3STDocument6 pagesDS3 - Dossier Technique - 3STBouabdellaoui saif ennasrPas encore d'évaluation
- Dessin D'ensembleDocument9 pagesDessin D'ensembleBouabdellaoui saif ennasr100% (1)
- Leçon1 - Cotation Fonctionnelle 15 16Document3 pagesLeçon1 - Cotation Fonctionnelle 15 16Bouabdellaoui saif ennasrPas encore d'évaluation
- DCN°22 3ScT 20-21 DPM CorDocument2 pagesDCN°22 3ScT 20-21 DPM CorBouabdellaoui saif ennasrPas encore d'évaluation
- Série Embrayage Et FreinDocument9 pagesSérie Embrayage Et FreinBouabdellaoui saif ennasrPas encore d'évaluation
- DS1 3 11 12DPMécaDocument4 pagesDS1 3 11 12DPMécaBouabdellaoui saif ennasr100% (1)
- Devoir de Synthese #2: Travail DemandéDocument4 pagesDevoir de Synthese #2: Travail DemandéBouabdellaoui saif ennasr100% (1)
- Devoir de Synthese 3-GEDocument4 pagesDevoir de Synthese 3-GEBouabdellaoui saif ennasrPas encore d'évaluation
- Série Des ExerciceS 1Document4 pagesSérie Des ExerciceS 1Bouabdellaoui saif ennasrPas encore d'évaluation
- Corrige DS2 3ST DT DR GM GE Region KairouanDocument8 pagesCorrige DS2 3ST DT DR GM GE Region KairouanBouabdellaoui saif ennasrPas encore d'évaluation
- DS2.3 ST - DTDocument6 pagesDS2.3 ST - DTBouabdellaoui saif ennasrPas encore d'évaluation
- dc2 3tech 2011 2012Document7 pagesdc2 3tech 2011 2012Bouabdellaoui saif ennasrPas encore d'évaluation
- Poulies Et CourroiesDocument4 pagesPoulies Et CourroiesBouabdellaoui saif ennasrPas encore d'évaluation
- Devoir de Contrôle N°1 - Technologie - Bac Technique (2010-2011) MR Hazel - TDocument8 pagesDevoir de Contrôle N°1 - Technologie - Bac Technique (2010-2011) MR Hazel - TBouabdellaoui saif ennasrPas encore d'évaluation
- Roues de FrictionDocument5 pagesRoues de FrictionBouabdellaoui saif ennasrPas encore d'évaluation
- Pignons ChaînesDocument2 pagesPignons ChaînesBouabdellaoui saif ennasrPas encore d'évaluation
- DS1 Poste de Poinçonnage DT 11-12-2015Document4 pagesDS1 Poste de Poinçonnage DT 11-12-2015Bouabdellaoui saif ennasrPas encore d'évaluation
- Cours Tolerances Geometriques eDocument5 pagesCours Tolerances Geometriques eBouabdellaoui saif ennasrPas encore d'évaluation
- DS2 3st 2021 DTDocument5 pagesDS2 3st 2021 DTBouabdellaoui saif ennasrPas encore d'évaluation
- Série D'exercices N°2Document3 pagesSérie D'exercices N°2Bouabdellaoui saif ennasrPas encore d'évaluation
- Série3 Cotation FonctionnelleDocument4 pagesSérie3 Cotation FonctionnelleBouabdellaoui saif ennasrPas encore d'évaluation
- Cours Dessin DF-2021Document10 pagesCours Dessin DF-2021Bouabdellaoui saif ennasrPas encore d'évaluation
- Les Prophéties Du Bon Pape Jean XXIIIDocument21 pagesLes Prophéties Du Bon Pape Jean XXIIIanthony.indigo777Pas encore d'évaluation
- 500 Recettes Santé & Beauté - Avec Des Produits NaturelsDocument260 pages500 Recettes Santé & Beauté - Avec Des Produits NaturelsSerge Cayer100% (2)
- Lecture Analytique Le Père Goriot (18 35)Document7 pagesLecture Analytique Le Père Goriot (18 35)Oumaima RM0% (1)
- Analyse de La Mthodologie de La Dclaration Du Bruit Des Machines Application Au Cas Des MeuleusDocument11 pagesAnalyse de La Mthodologie de La Dclaration Du Bruit Des Machines Application Au Cas Des MeuleusHamza AbdelhamidPas encore d'évaluation
- Template 0Document10 pagesTemplate 0Warda HassibiPas encore d'évaluation
- Les Habitants Du Pays D'arles Et L'avenir de Leur TerritoireDocument15 pagesLes Habitants Du Pays D'arles Et L'avenir de Leur TerritoireGometMediaPas encore d'évaluation
- LectureNotes ConvexOptimization PWeissDocument61 pagesLectureNotes ConvexOptimization PWeissAzer TyuiopPas encore d'évaluation
- Engrenages 1Document7 pagesEngrenages 1Mohamed LaliouiPas encore d'évaluation
- Capteurs Et Detecteurs IndustrielsDocument14 pagesCapteurs Et Detecteurs Industrielszouaoua slimanePas encore d'évaluation
- Serie AspideposeDocument2 pagesSerie AspideposefdesrochesPas encore d'évaluation
- Concours General Mathematiques Corrige Serie S 2010Document9 pagesConcours General Mathematiques Corrige Serie S 2010Ousmane BahPas encore d'évaluation
- Cours 1 Ère D Amplificateur OpérationnelDocument7 pagesCours 1 Ère D Amplificateur OpérationnelSada DiopPas encore d'évaluation
- Diffusion Des ParticulesDocument12 pagesDiffusion Des ParticulesSABAPas encore d'évaluation
- Point de Fusion CHM1721Document5 pagesPoint de Fusion CHM1721ninasadi107Pas encore d'évaluation
- 4-Presentation Des Projets À Réaliser Pour 2023Document43 pages4-Presentation Des Projets À Réaliser Pour 2023Wilfried KAMENANPas encore d'évaluation
- Réaction InflammatoireDocument36 pagesRéaction InflammatoireScribd Reader100% (1)
- C PT 2020 PDFDocument16 pagesC PT 2020 PDFHammouda ChebbiPas encore d'évaluation
- Résumé Du CoursDocument12 pagesRésumé Du CoursOthmane Dhaimi100% (1)
- Chardonneret ParvaDocument4 pagesChardonneret ParvamarweninfoPas encore d'évaluation
- TP 2Document6 pagesTP 2hylaayatPas encore d'évaluation
- FT N223 Fmce-250 FR - 012020 - 0Document3 pagesFT N223 Fmce-250 FR - 012020 - 0FhuifPas encore d'évaluation
- Moteur Jabiru2200Document8 pagesMoteur Jabiru2200barthodPas encore d'évaluation
- Complément en Maintenance D'équipements TechniquesDocument35 pagesComplément en Maintenance D'équipements Techniquesabbas.ceriPas encore d'évaluation
- PDR Maco 3 Seq 4Document1 pagePDR Maco 3 Seq 4Jephte KenfackPas encore d'évaluation
- Plantes Aromatique Et Médicinales Du MarocDocument215 pagesPlantes Aromatique Et Médicinales Du MarocNourddin KoulaliPas encore d'évaluation
- Reseaux IntelligentsDocument32 pagesReseaux Intelligentszhanglu585100% (1)
- Epreuve MarketingDocument2 pagesEpreuve MarketingVictor AlajePas encore d'évaluation
- Cours 5Document5 pagesCours 5Ahmed Salem Abdel VettahPas encore d'évaluation