TD Statique
TD Statique
Télécharger au format pdf ou txt
Vous aimerez peut-être aussi
- Exercice N°2 - Unités de Mesure de L'information - Livres InformatiquesDocument1 pageExercice N°2 - Unités de Mesure de L'information - Livres Informatiquescopie master100% (1)
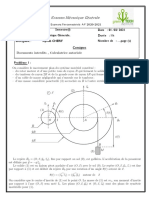
- TD Statique CinématiqueDocument5 pagesTD Statique CinématiqueAhmed fattoumPas encore d'évaluation
- Annales de Mathématiques, Baccalauréat C et E, Cameroun, 2008 - 2018: Sujets et CorrigésD'EverandAnnales de Mathématiques, Baccalauréat C et E, Cameroun, 2008 - 2018: Sujets et CorrigésÉvaluation : 4 sur 5 étoiles4/5 (6)
- 152 Pince Ericc3 Version2Document2 pages152 Pince Ericc3 Version2Chaymae OuahmanePas encore d'évaluation
- 152 Pince Ericc3 Version2Document2 pages152 Pince Ericc3 Version2Faical BharPas encore d'évaluation
- Apsim 2 StatiqueDocument2 pagesApsim 2 StatiqueMiguel Clovis KamPas encore d'évaluation
- Synthese 2007-2008Document9 pagesSynthese 2007-2008HamidPas encore d'évaluation
- Chapitre2 Robotique 2017Document28 pagesChapitre2 Robotique 2017askaricePas encore d'évaluation
- Rattrapage Année 2001-2002Document2 pagesRattrapage Année 2001-2002mimaPas encore d'évaluation
- Exercice 1: CPGE - LIT - Marrakech Statique TD1 Pcsi1 OuikassiDocument1 pageExercice 1: CPGE - LIT - Marrakech Statique TD1 Pcsi1 Ouikassiakarne Youness100% (1)
- TD Statique CinématiqueDocument5 pagesTD Statique CinématiqueNour Allah tabibPas encore d'évaluation
- c02 TD Determiner Les Lois de Pilotage en MouvementDocument28 pagesc02 TD Determiner Les Lois de Pilotage en MouvementLoic GomaPas encore d'évaluation
- MVA006 ndc06Document7 pagesMVA006 ndc06oldan783Pas encore d'évaluation
- 910 2Bm National 2013 Ss2 EnoncéDocument3 pages910 2Bm National 2013 Ss2 EnoncéYsr QuantPas encore d'évaluation
- Cisaillement 2STMDocument6 pagesCisaillement 2STMAlami ElPas encore d'évaluation
- CNC Si Tsi GM 2021Document21 pagesCNC Si Tsi GM 2021Wafae BararaPas encore d'évaluation
- Bac Gabon Maths 2012 Series CEDocument9 pagesBac Gabon Maths 2012 Series CEJérémie Ndjoye100% (1)
- CH Courbes PDFDocument33 pagesCH Courbes PDFMohamed ElPas encore d'évaluation
- CH Courbes PDFDocument33 pagesCH Courbes PDFTahiri MehdiPas encore d'évaluation
- 13 - Correction Preparation CineÌtique +dynamique GMDocument5 pages13 - Correction Preparation CineÌtique +dynamique GMhadefyasPas encore d'évaluation
- Colle-04-Dynamique 2TSI 23Document2 pagesColle-04-Dynamique 2TSI 23ASTRO FFPas encore d'évaluation
- Ds1 Mp1Document2 pagesDs1 Mp1bahriPas encore d'évaluation
- X Ens MP 2019 Physique Si SujetDocument15 pagesX Ens MP 2019 Physique Si SujetSohaib EL KARMIPas encore d'évaluation
- Corrigé Concours Blanc N°1 - 23-24Document3 pagesCorrigé Concours Blanc N°1 - 23-24yasser bhPas encore d'évaluation
- Courbes_paramétréesDocument36 pagesCourbes_paramétréesOrnella FeukengPas encore d'évaluation
- Ex 15 16Document18 pagesEx 15 16Sd instruPas encore d'évaluation
- TD22 23 CorrectionDocument14 pagesTD22 23 Correctionyoussef sahelPas encore d'évaluation
- Cours 080 Cinematique Du Point Dun SolideDocument6 pagesCours 080 Cinematique Du Point Dun SolideMohamed SalhPas encore d'évaluation
- Lycée Pilote Sousse - DC 1 2020Document2 pagesLycée Pilote Sousse - DC 1 2020nahdyseifPas encore d'évaluation
- X Ens MP Physique 2022 SujetDocument13 pagesX Ens MP Physique 2022 SujetTricePas encore d'évaluation
- ExercicesofRigidbodiesmechanics ExercicesdemcaniquedesolidesrigidesDocument77 pagesExercicesofRigidbodiesmechanics ExercicesdemcaniquedesolidesrigidesTàHa SamihPas encore d'évaluation
- RDM Projet BTS AMCR MartiguesDocument40 pagesRDM Projet BTS AMCR MartiguesWissem TaktakPas encore d'évaluation
- 3am DS2Document20 pages3am DS2ahmed benabdelkader100% (1)
- $examen Final S1 UM6PDocument5 pages$examen Final S1 UM6PIchrak madromiPas encore d'évaluation
- 2015 Ecricome-CorrigeDocument9 pages2015 Ecricome-CorrigeChaimae BouzaganePas encore d'évaluation
- Examen Initiation À La Modélisation Mai 2017Document2 pagesExamen Initiation À La Modélisation Mai 2017عبد الرحمانPas encore d'évaluation
- CNC 2019 GM TSIDocument13 pagesCNC 2019 GM TSIWafae BararaPas encore d'évaluation
- Balga-Mp Psi Tsi-GmDocument22 pagesBalga-Mp Psi Tsi-GmDeodat KonePas encore d'évaluation
- EPREUVE DE MATHEMATIQUES N°2 DU 1ER TRIMESTRE - CLASSE TLE C - CAMEROUNDocument2 pagesEPREUVE DE MATHEMATIQUES N°2 DU 1ER TRIMESTRE - CLASSE TLE C - CAMEROUNmariepaulepoyPas encore d'évaluation
- 2020 École Polytechnique Physique Et SI MP EnonceDocument14 pages2020 École Polytechnique Physique Et SI MP EnonceAbdellatif HmairrouPas encore d'évaluation
- 208 Prehenseur CorrigeDocument4 pages208 Prehenseur CorrigeAhmed TalsiPas encore d'évaluation
- Ennoncé de L'examen MS 14-15Document2 pagesEnnoncé de L'examen MS 14-15mohaPas encore d'évaluation
- DS Mécanique S.N 21-23Document9 pagesDS Mécanique S.N 21-23cool clipsPas encore d'évaluation
- TD5 Iso AxisDocument3 pagesTD5 Iso Axiseliabtossa03Pas encore d'évaluation
- TD Statique Graphique TD 2023Document4 pagesTD Statique Graphique TD 2023ouilisignoncedricPas encore d'évaluation
- 121 2 Mini Concours Sup CorrigeDocument8 pages121 2 Mini Concours Sup CorrigeZaineb Abbad100% (1)
- SERIE TD2 - Cinematique - 2020 2021Document10 pagesSERIE TD2 - Cinematique - 2020 2021Nowe AhmadePas encore d'évaluation
- Formulaire Révision Méca 1ère AnnéeDocument4 pagesFormulaire Révision Méca 1ère Annéefloxzox929Pas encore d'évaluation
- 32 Fermeture Geo ExercicesDocument4 pages32 Fermeture Geo Exerciceslaalai faicelPas encore d'évaluation
- CC 1 PDFDocument4 pagesCC 1 PDFFanny GaPas encore d'évaluation
- Problème 1: Étude D'un RéducteurDocument19 pagesProblème 1: Étude D'un RéducteuryumiPas encore d'évaluation
- Dev Phys3 19-20Document2 pagesDev Phys3 19-20Abdelouahab ChPas encore d'évaluation
- FeuilleReduction 2Document4 pagesFeuilleReduction 2Rose PatchouPas encore d'évaluation
- Capture D'écran . 2024-06-24 À 15.43.40Document5 pagesCapture D'écran . 2024-06-24 À 15.43.40MALEK. HDPas encore d'évaluation
- Untitled 1Document2 pagesUntitled 1zhiwaPas encore d'évaluation
- 152 2 Pince Ericc3 Version2 CorrigeDocument2 pages152 2 Pince Ericc3 Version2 CorrigeChaymae OuahmanePas encore d'évaluation
- Td9 - Solide Tunusie ImportantDocument28 pagesTd9 - Solide Tunusie ImportantDriss Miral Achemlal100% (1)
- TD 9Document28 pagesTD 9Ali AmaraPas encore d'évaluation
- Examen Final Mécanique Rationnelle I 2020 EnoncéDocument1 pageExamen Final Mécanique Rationnelle I 2020 EnoncéAnes BelaidPas encore d'évaluation
- Équations différentielles: Les Grands Articles d'UniversalisD'EverandÉquations différentielles: Les Grands Articles d'UniversalisPas encore d'évaluation
- 4 Arthropathies Microcristallines Rostom 2024Document69 pages4 Arthropathies Microcristallines Rostom 2024copie masterPas encore d'évaluation
- Mouvement D'un Projectile - Mouvements Plans - 2 Bac SM - (Exercice 9) - DevoirDocument2 pagesMouvement D'un Projectile - Mouvements Plans - 2 Bac SM - (Exercice 9) - Devoircopie masterPas encore d'évaluation
- S1 SeriesDocument1 pageS1 Seriescopie masterPas encore d'évaluation
- CHIMIOTHERAPIEDocument3 pagesCHIMIOTHERAPIEcopie master100% (1)
- Aourid - Sciences Politique 2ème PartieDocument38 pagesAourid - Sciences Politique 2ème Partiecopie masterPas encore d'évaluation
- Fonction Concours CoursDocument18 pagesFonction Concours Courscopie masterPas encore d'évaluation
- Revisions Prof Copie 2Document1 pageRevisions Prof Copie 2copie masterPas encore d'évaluation
- Chapitre 8 - HistoireDocument7 pagesChapitre 8 - Histoirecopie masterPas encore d'évaluation
- Constitution France 1958Document4 pagesConstitution France 1958copie masterPas encore d'évaluation
- Suites Numeriques Exercices Non Corriges 3 6Document6 pagesSuites Numeriques Exercices Non Corriges 3 6copie masterPas encore d'évaluation
- New Doc 12-22-2023 08.46Document2 pagesNew Doc 12-22-2023 08.46copie masterPas encore d'évaluation
- Travaux Dirigés Série 6Document6 pagesTravaux Dirigés Série 6copie masterPas encore d'évaluation
- ROSACEE FINALE - Docx 11.44.16Document6 pagesROSACEE FINALE - Docx 11.44.16copie masterPas encore d'évaluation
- Cours N 6 (CH) Dosage Acido. (Élév) DocxDocument2 pagesCours N 6 (CH) Dosage Acido. (Élév) Docxcopie masterPas encore d'évaluation
- Résumer Phy ADocument9 pagesRésumer Phy Acopie masterPas encore d'évaluation
- Chapitre 1.pdf Electronique NumeriqueDocument16 pagesChapitre 1.pdf Electronique Numeriquecopie masterPas encore d'évaluation
- P2 Polycopié Pédiatrie Endoc-Neuro-HématoDocument76 pagesP2 Polycopié Pédiatrie Endoc-Neuro-Hématocopie master100% (1)
- Management Strateěgique Et Opeěrationnel MUS 2023Document25 pagesManagement Strateěgique Et Opeěrationnel MUS 2023copie masterPas encore d'évaluation
- Théorèmes D'approximation de WeierstrassDocument2 pagesThéorèmes D'approximation de Weierstrasscopie master100% (1)
- ATELIER 1 (Intro Économie)Document2 pagesATELIER 1 (Intro Économie)copie masterPas encore d'évaluation
- Ds 2 Moulay YoussefDocument4 pagesDs 2 Moulay Youssefcopie masterPas encore d'évaluation
- Exercice N°7 - Architecture D'ordinateur - Livres InformatiquesDocument2 pagesExercice N°7 - Architecture D'ordinateur - Livres Informatiquescopie masterPas encore d'évaluation
- Séries de FourierDocument12 pagesSéries de Fouriercopie masterPas encore d'évaluation
- Les Composantes de La CommDocument2 pagesLes Composantes de La Commcopie masterPas encore d'évaluation
- Physique I Mines MP 2008 ÉnoncéDocument4 pagesPhysique I Mines MP 2008 Énoncécopie masterPas encore d'évaluation
- Physique 1 CNC MP 2015Document10 pagesPhysique 1 CNC MP 2015copie masterPas encore d'évaluation
- Chimie Chapitre 2 Reactions Acido BasiquesDocument8 pagesChimie Chapitre 2 Reactions Acido Basiquescopie masterPas encore d'évaluation
- Série N°1 - L'eau 1AC 2023Document2 pagesSérie N°1 - L'eau 1AC 2023copie masterPas encore d'évaluation
- Série 6: Exercice 1Document2 pagesSérie 6: Exercice 1copie masterPas encore d'évaluation
- 2 - Chap II - Les Amplificateurs Operationnels - Session 02Document53 pages2 - Chap II - Les Amplificateurs Operationnels - Session 02MOUSSA Mamane RabiouPas encore d'évaluation
- Présentation1MEMO - PPTX DavidDocument13 pagesPrésentation1MEMO - PPTX Davidstevembaya077Pas encore d'évaluation
- DS Corrigé EssMéca L3J 17 18Document3 pagesDS Corrigé EssMéca L3J 17 18tidiane Demba MahoungouPas encore d'évaluation
- DTR 1.4.1 Procédure Racc Conso L342-2 v19 10 17 - FRDocument17 pagesDTR 1.4.1 Procédure Racc Conso L342-2 v19 10 17 - FRBAMARIPas encore d'évaluation
- TD 3 Techniques de Programmation Langage CDocument2 pagesTD 3 Techniques de Programmation Langage CIlias OuPas encore d'évaluation
- 3. Transfert De Chaleur Par Conduction En Régime Variable: grad T) +P= ρC ∂ T ∂tDocument8 pages3. Transfert De Chaleur Par Conduction En Régime Variable: grad T) +P= ρC ∂ T ∂tBibicha Vida100% (1)
- TP 2 Dosage Des Oléfines Dans L'essenceDocument3 pagesTP 2 Dosage Des Oléfines Dans L'essencebest musicPas encore d'évaluation
- MATHS 1ère C Séquence 4Document2 pagesMATHS 1ère C Séquence 4atsangueyayaPas encore d'évaluation
- Chimie Minérale 1Document35 pagesChimie Minérale 1Ouedraogo HarounaPas encore d'évaluation
- CALIBRATION DU SPECTROMETRE DE FLUORESCENCE A RAYON X - EL GAIDOUMI AbdelaliDocument34 pagesCALIBRATION DU SPECTROMETRE DE FLUORESCENCE A RAYON X - EL GAIDOUMI Abdelalifatima azalmadPas encore d'évaluation
- FICHE Puissance Et Energie Electrique 3èmeDocument7 pagesFICHE Puissance Et Energie Electrique 3èmekoziserge13Pas encore d'évaluation
- TD ConvectionDocument26 pagesTD ConvectionIkram KhedimPas encore d'évaluation
- Devoir Mecanique Des Sols....Document21 pagesDevoir Mecanique Des Sols....previl bodyPas encore d'évaluation
- Exercices D'applications Sur AlimentationsDocument4 pagesExercices D'applications Sur AlimentationsYoussef RagraguiPas encore d'évaluation
- CylindriciteDocument14 pagesCylindriciteمكتبة الباحثPas encore d'évaluation
- Régime Dynamique Mcc1Document10 pagesRégime Dynamique Mcc1Rachid BenjalouajaPas encore d'évaluation
- 4764 Dossier Sujet Epreuve E11 Bac Pro Maintenance Nautique Session 2014Document13 pages4764 Dossier Sujet Epreuve E11 Bac Pro Maintenance Nautique Session 2014pjmn5bd2bmPas encore d'évaluation
- TD ConvertisseurDocument5 pagesTD Convertisseurhoussam haddaniPas encore d'évaluation
- TD 03 Electronique de Puissance ELNDocument2 pagesTD 03 Electronique de Puissance ELNamine menadPas encore d'évaluation
- Automate C200Document203 pagesAutomate C200Vaillant CartonnagesPas encore d'évaluation
- Ecoulement Fluide Fiche CoursDocument2 pagesEcoulement Fluide Fiche CoursAhmedPas encore d'évaluation
- Chapitre 2Document23 pagesChapitre 2eyazarrouki70Pas encore d'évaluation
- cm2 JCB 01Document39 pagescm2 JCB 01FredPas encore d'évaluation
- Iec 60969-2001Document22 pagesIec 60969-2001Víctor elkinPas encore d'évaluation
- Devoir Metrolog 1Document5 pagesDevoir Metrolog 1AnasPas encore d'évaluation
- Tableau Des Shemas MecaniquesDocument1 pageTableau Des Shemas MecaniquesntabPas encore d'évaluation
- BLPC SP Essai de Penetration Compil PDFDocument69 pagesBLPC SP Essai de Penetration Compil PDFZOUABIPas encore d'évaluation
- DL2S2 TCSF2024Document1 pageDL2S2 TCSF2024yassine achabePas encore d'évaluation
- Hyperplans de MN (K)Document5 pagesHyperplans de MN (K)program yoPas encore d'évaluation
- 2016 Mathematiques2Document2 pages2016 Mathematiques2bruceloic07Pas encore d'évaluation