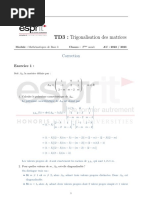
Ex3 TD4
Ex3 TD4
Télécharger au format pdf ou txt
Vous aimerez peut-être aussi
- P3 WS7 CorrigeDocument12 pagesP3 WS7 Corrigedawah1313Pas encore d'évaluation
- DevoirDocument12 pagesDevoirrafik94100% (1)
- Serie D'exercices No1 - Correction-Exercice 2Document18 pagesSerie D'exercices No1 - Correction-Exercice 2Aymen GuizaniPas encore d'évaluation
- Correction Exercice 3 AnDocument18 pagesCorrection Exercice 3 Anoussama.ahmedPas encore d'évaluation
- Théorie de GaloisDocument66 pagesThéorie de GaloisFrederic FontanetPas encore d'évaluation
- Déterminantsalg 3Document16 pagesDéterminantsalg 3saidbanachPas encore d'évaluation
- Appliquer Les Lois Relatives Aux Circuits Électriques en Courant ContinuDocument10 pagesAppliquer Les Lois Relatives Aux Circuits Électriques en Courant ContinuFélix KouassiPas encore d'évaluation
- Serie 22Document11 pagesSerie 22emmanuel.mandaPas encore d'évaluation
- Projet Thiam 2022Document16 pagesProjet Thiam 2022paulin kampalPas encore d'évaluation
- Exos MathDocument59 pagesExos MathN'DRIPas encore d'évaluation
- CCP MP Maths 1Document5 pagesCCP MP Maths 1anass griniPas encore d'évaluation
- 2 1 Ch1 Suite Dipole ElectrostatiqueDocument7 pages2 1 Ch1 Suite Dipole ElectrostatiqueMohamed BerrachedPas encore d'évaluation
- Valeurs Propres CORRECTIONDocument12 pagesValeurs Propres CORRECTIONMalak FILALIPas encore d'évaluation
- Correction TD TrigonalisationDocument10 pagesCorrection TD TrigonalisationHOUSSEM AMAIDIPas encore d'évaluation
- JMPA_1847_1_12__137_0Document36 pagesJMPA_1847_1_12__137_0kabessara7Pas encore d'évaluation
- Cmatd 1Document2 pagesCmatd 1fm.memberPas encore d'évaluation
- TD Serie1 - 2 PDFDocument4 pagesTD Serie1 - 2 PDFBouallegue MounirPas encore d'évaluation
- Systime LiniéreDocument3 pagesSystime LiniéreYassinPas encore d'évaluation
- Mystere OeufDocument2 pagesMystere OeufOctinionPas encore d'évaluation
- Travaux Dirigés-UE: Physique A Fiche 3Document1 pageTravaux Dirigés-UE: Physique A Fiche 3Jo RrisPas encore d'évaluation
- AA4 - Critère de DiagonalisationDocument23 pagesAA4 - Critère de DiagonalisationSirinePas encore d'évaluation
- Exexcices Et CorrigesDocument16 pagesExexcices Et CorrigeshajarPas encore d'évaluation
- TD1 L3 AnumDocument2 pagesTD1 L3 AnumYoussef DahaniPas encore d'évaluation
- Exercices Chapitre 9 CorrectionDocument11 pagesExercices Chapitre 9 Correctionmo7299851Pas encore d'évaluation
- Ecoulement Entre Deux CylindresDocument8 pagesEcoulement Entre Deux Cylindreshanaa soltani100% (1)
- td7 Algebre - Trigonalisation23Document1 pagetd7 Algebre - Trigonalisation23hassegoutePas encore d'évaluation
- , x, y, x λ (x, x, 0) E est-il un espace vectoriel ?Document2 pages, x, y, x λ (x, x, 0) E est-il un espace vectoriel ?rowliebeachyPas encore d'évaluation
- TD5 LM270Document4 pagesTD5 LM270sechoirambulantPas encore d'évaluation
- Math2 TD 2019Document15 pagesMath2 TD 2019Ismail AmeskourPas encore d'évaluation
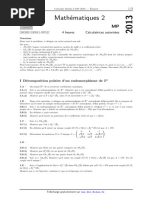
- Mathématiques 2: 4 Heures Calculatrices AutoriséesDocument3 pagesMathématiques 2: 4 Heures Calculatrices AutoriséesKenza SadokPas encore d'évaluation
- Electrostatique TD1Document4 pagesElectrostatique TD1karolassenePas encore d'évaluation
- NormeDocument9 pagesNormefredericcascoPas encore d'évaluation
- TD L3 MecaQDocument20 pagesTD L3 MecaQJohnPas encore d'évaluation
- Appliquer Les Lois Relatives Aux Circuits Électriques en Courant Continu - ÉlèveDocument7 pagesAppliquer Les Lois Relatives Aux Circuits Électriques en Courant Continu - ÉlèveFélix KouassiPas encore d'évaluation
- MAT131_FICHE_DE_TD_20241120_0001Document4 pagesMAT131_FICHE_DE_TD_20241120_0001Hermann BilePas encore d'évaluation
- Corr.dm Nc2b012 de Lecc81lectromagnecc81tismeDocument11 pagesCorr.dm Nc2b012 de Lecc81lectromagnecc81tismeouedraogotidiane49Pas encore d'évaluation
- Preparation TP 2 Mécanique des fluide viDocument6 pagesPreparation TP 2 Mécanique des fluide viquilliquegrumma-7707Pas encore d'évaluation
- Série-TD-2-1Document2 pagesSérie-TD-2-1Dilane DerdanePas encore d'évaluation
- Pont de WheatstoneDocument8 pagesPont de WheatstoneKsiaze AniolkaPas encore d'évaluation
- Rayonnement D'un Conducteur CoursDocument3 pagesRayonnement D'un Conducteur Courspsn.bjaPas encore d'évaluation
- DM06 PDFDocument1 pageDM06 PDFazertyPas encore d'évaluation
- APE6 SolDocument18 pagesAPE6 Soljimes30928Pas encore d'évaluation
- Correction GaussDocument8 pagesCorrection Gaussboukredimidjamel1958Pas encore d'évaluation
- TP 0Document24 pagesTP 0BilaPas encore d'évaluation
- Corrigé UMDocument9 pagesCorrigé UMUlrich MomosPas encore d'évaluation
- TDDocument4 pagesTDZeltyPas encore d'évaluation
- td3 s2 L1mpiDocument2 pagestd3 s2 L1mpiThierno Mamadou Aliou DIALLOPas encore d'évaluation
- PCSI5 Complement1Document2 pagesPCSI5 Complement1Marina OtakuPas encore d'évaluation
- ds2-2023-2024-solDocument6 pagesds2-2023-2024-solmkkb7157Pas encore d'évaluation
- TD - 1-Notions de LogiqueDocument3 pagesTD - 1-Notions de LogiqueadamboumergoudPas encore d'évaluation
- No13 09 Mars 2022 Sujetexa - ComDocument2 pagesNo13 09 Mars 2022 Sujetexa - ComFaci DnfPas encore d'évaluation
- SujetDocument3 pagesSujetSelma Ben SassiPas encore d'évaluation
- LMD-ST3 M.R. Février2008Document6 pagesLMD-ST3 M.R. Février2008Gumball 3303Pas encore d'évaluation
- Ana.2 Polynomes Fractions Rat PDFDocument9 pagesAna.2 Polynomes Fractions Rat PDFabdellahmorPas encore d'évaluation
- TDN 3: Diagonalisation de Matrices Carréés Sections: 7 Et 8Document2 pagesTDN 3: Diagonalisation de Matrices Carréés Sections: 7 Et 8Owusu Ansah JacobPas encore d'évaluation
- TD 11 - Fonctions Usuelles - CorrectionDocument6 pagesTD 11 - Fonctions Usuelles - CorrectionmaminemezzanePas encore d'évaluation
- DL 1Document1 pageDL 1anasse831Pas encore d'évaluation
- 1S - Rie D'exercices Corrig - S 1 D'analyse 1, SMIA S1Document16 pages1S - Rie D'exercices Corrig - S 1 D'analyse 1, SMIA S1Faty MaPas encore d'évaluation
- MP MATHS CENTRALE 2 2013.enonceDocument3 pagesMP MATHS CENTRALE 2 2013.enoncebhffuhPas encore d'évaluation
- Inegalites Dans Ir CoursDocument4 pagesInegalites Dans Ir CoursYassine KenPas encore d'évaluation
- Mathematiques Par Les Problemes Au BrevetD'EverandMathematiques Par Les Problemes Au BrevetÉvaluation : 3 sur 5 étoiles3/5 (1)
- Esterification CoursDocument13 pagesEsterification CoursKhalil ChkiliPas encore d'évaluation
- Examne ElectroDocument11 pagesExamne ElectroKhalil ChkiliPas encore d'évaluation
- Chapitre - Les Execptions - VFDocument10 pagesChapitre - Les Execptions - VFKhalil ChkiliPas encore d'évaluation
- Résumé SGBDDocument6 pagesRésumé SGBDKhalil ChkiliPas encore d'évaluation
- Introduction Au Big DataDocument10 pagesIntroduction Au Big DataKhalil ChkiliPas encore d'évaluation
- T L (TLA) : Exercice 1Document5 pagesT L (TLA) : Exercice 1hajerPas encore d'évaluation
- RegressionDocument21 pagesRegressionRTOPas encore d'évaluation
- Manuel TP AN-1Document20 pagesManuel TP AN-1Fahd KhalfatPas encore d'évaluation
- TD3: Equations Non LinéairesDocument6 pagesTD3: Equations Non Linéairesزهرة المدائنPas encore d'évaluation
- El Motamid Houria tp1 PYDocument6 pagesEl Motamid Houria tp1 PYMohamed EL HajjiPas encore d'évaluation
- 1ere D Equations Et InequationsDocument20 pages1ere D Equations Et InequationsibxxxPas encore d'évaluation
- Cours 3 Tri Et Recharche SDDocument30 pagesCours 3 Tri Et Recharche SDAyoub Er-rkhisPas encore d'évaluation
- 1 Les Algorithmes Des Plus Courts CheminsDocument6 pages1 Les Algorithmes Des Plus Courts Cheminssaraayoub440Pas encore d'évaluation
- Méthode HornerDocument4 pagesMéthode HornerBen Ali FathiPas encore d'évaluation
- Helper-Exam-MAT 227Document19 pagesHelper-Exam-MAT 227Escanor BanPas encore d'évaluation
- Cours Ro Chap2 PDFDocument42 pagesCours Ro Chap2 PDFjouaitiPas encore d'évaluation
- Exam_final_LSTDocument1 pageExam_final_LSTyounesboho2003Pas encore d'évaluation
- Correction Test Mthodes-Numriques 15 - 11 - 2020Document3 pagesCorrection Test Mthodes-Numriques 15 - 11 - 2020simerabettayeb14Pas encore d'évaluation
- Cours Analyse NumeriqueDocument20 pagesCours Analyse NumeriqueBrahim Ait LakhyaPas encore d'évaluation
- Algébre Anneau - PolynomesDocument19 pagesAlgébre Anneau - Polynomesrenaud thoby sassouPas encore d'évaluation
- Chapitre IIIDocument6 pagesChapitre IIIabdouPas encore d'évaluation
- Chap2 ExoDocument4 pagesChap2 ExoBelheziel AekPas encore d'évaluation
- 2022 2023 AnaNumMat TP06 InterpolationDocument3 pages2022 2023 AnaNumMat TP06 InterpolationNour ouzeriPas encore d'évaluation
- Chapitre 2 - Méthode Des Différences FiniesDocument28 pagesChapitre 2 - Méthode Des Différences Finieswejdenwajdouna6Pas encore d'évaluation
- Sujet TP1Document3 pagesSujet TP1v9vw7zrrmqPas encore d'évaluation
- Analyse Numérique - Recueil D'exercices Corrigés Et Aide-MémoireDocument131 pagesAnalyse Numérique - Recueil D'exercices Corrigés Et Aide-MémoireNihad Aghbalou83% (6)
- TD2 20Document13 pagesTD2 20IDRISSIPas encore d'évaluation
- PNL Insea 2023 Part 2 PDFDocument76 pagesPNL Insea 2023 Part 2 PDFChai mae AgnawPas encore d'évaluation
- PolyMethNumBentobache2020 2021Document50 pagesPolyMethNumBentobache2020 2021vedette352Pas encore d'évaluation
- Lecon 09 Factorisaton Dun PolynomeDocument24 pagesLecon 09 Factorisaton Dun PolynomesalimangyangromeoalbanPas encore d'évaluation
- Chapitre 2 ÉDocument16 pagesChapitre 2 ÉMolly EdwardPas encore d'évaluation
- CR AiDocument6 pagesCR Airhariss97Pas encore d'évaluation
- chapitre 5 et 6Document42 pageschapitre 5 et 6mhncxgvjm4Pas encore d'évaluation