Téléchargez comme PDF, TXT ou lisez en ligne sur Scribd
Télécharger au format pdf ou txt
Vous êtes sur la page 1/ 8
Chapitre 1 : Généralités sur l’acquisition et le traitement du Signal
Chapitre 1 : Généralités sur l’acquisition et le traitement du signal
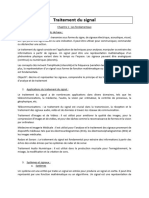
I. Introduction Une grandeur physique crée suite à un phénomène physique (électrique, acoustique, optique, ...) est appelée « mesurande ». Exemple: Tension électrique, Pression d’un gaz, température d’un corps, le son d’un instrument…. Ainsi, on peut définir un signal comme l’évolution au cours du temps de cette grandeur physique. Elle nécessite un capteur pour son acquisition
Figure 1- Chaîne d’acquisition et de traitement numérique de signal
II. Capteur
Il existe 3 types de capteurs :
1. Les capteurs analogiques : a) capteur passif : Valeur d’impédance Mesurande Capteur passif (R, C, L) Exemple : − Capteur de température : sonde PT100 (R=100 Ω à T=0°C) − Capteur LDR (Light Dependent Resistor) − Capteur de niveau résistif ou capacitif − Capteur d’humidité résistif ou capacitif
Figure 2 – Allure de la courbe R=f(T), pour la sonde PT100
Acquisition et traitement numérique du signal 1
Chapitre 1 : Généralités sur l’acquisition et le traitement du Signal
Figure 3 – Allure de la courbe R=f(Lux) pour le capteur LDR
b) capteur actif : Tension, courant ou Mesurande Capteur actif fréquence Exemple : − Capteur de température : Thermocouple LM35 (Sortie en tension) − Capteur de dioxyde de carbone MQ-135 (Sortie en tension) − Capteur de courant alternatif ACS712Ic (Sortie en tension) − Capteur de tension alternative ZMPT101B (Sortie courant continu)
Figure 4 – Allure de la courbe V=f(T) pour le Thermocouple LM35
2. Les capteurs TOR : Fonctionne avec une logique à 2 états (ON/OFF ; Ouvert/Fermé ; Haut/Bas ; …) Exemple : − Capteur de fin de course − Capteur de proximité (inductif, capacitifs, optiques, ultrasons, magnétiques). − Capteur de mouvement PIR (Passive InfraRed sensor) 3. Les capteurs numériques : La sortie du capteur est numérique et qui peut être branchée directement à une carte électronique (PIC, Arduino, NOD MCU, STM32, API, …).
Acquisition et traitement numérique du signal 2
Chapitre 1 : Généralités sur l’acquisition et le traitement du Signal Exemple : − Capteur de température et humidité DHT11, DHT22 − Capteur Ultrason HC-SR04 : mesure la distance, se connecte à une carte Arduino. − Capteur de luminosité BH1750.
Figure 4 – Tableau comparatif des capteurs DHT11 et DHT22
III. Conditionnement Cette étape permet de mettre le signal issu du capteur en forme pour la transmission. Cette mise en forme comporte un filtrage et une amplification. Pour les capteurs passifs un convertisseur est ajouté. Il permet de convertir l’impédance de sortie de capteur en tension, courant ou fréquence afin d’être exploitée numériquement.
IV. Transmission
On s’intéresse à la transmission d’un signal sur un support de transmission physique (câble ou
fibre optique) ou non-physique (Onde électromagnétique). La transmission peut être en bande de base ou en bande transposée. Ceci en connaissant les caractéristiques fréquentielles des supports de transmission (bande passante). Exemple : − Paire torsadée : du DC jusqu’à 100 MHz. − Câble coaxial : du DC jusqu’à 1 GHz. − Fibre optique : de 30 GHz jusqu’à 1 THz.
V. Numérisation et Traitement numérique :
La numérisation des signaux est réalisée par des Convertisseurs Analogique Numériques (CAN) permettant de convertir le signal analogique en un signal numérique. La numérisation comporte 2 étapes :
Acquisition et traitement numérique du signal 3
Chapitre 1 : Généralités sur l’acquisition et le traitement du Signal L’échantillonnage : permet de prendre des échantillons de l’amplitude du signal périodiquement ( à chaque période d’échantillonnage : qui respecte le théorème de SHANNON dans sa détermination : fe=1/Te ; avec fe>2*fmax ; fmax : fréquence maximale du signal). La quantification : Conversion des valeurs analogiques des échantillons en des valeurs numériques . Le traitement numérique du signal comporte : − Détection : isoler les composantes utiles d’un signal, extraire un signal d’un bruit de fond. − Identification : classement d’un signal (identification d’une pathologie à partir d’un signal ECG, reconnaissance de forme, reconnaissance de la parole, …). − Adaptation et transformation : Filtrage d’un signal (Elimination de certaines composantes spécifiques), Codage/Compression (JPEG, MP3, MPEG4, …)
VI. Classification des signaux
Les signaux peuvent être classés en plusieurs catégories suivant leurs propriétés. On distingue principalement : 1. Classification morphologique : On distingue les cas suivants : - Signal à temps continu et à amplitude continue : signal analogique ; - Signal à temps discret et à amplitude continue : signal échantillonné ; - Signal à temps continu et à amplitude discrète : signal quantifié ; - Signal à temps discret et à amplitude discrète: signal numérique.
Figure 5. Classification morphologique
2. Classification spectrale : Les signaux peuvent être classés selon leurs distributions de l’énergie ou de l’amplitude en fonction de la fréquence ; on parle donc de la densité spectrale d’énergie ou densité spectrale
Acquisition et traitement numérique du signal 4
Chapitre 1 : Généralités sur l’acquisition et le traitement du Signal d’amplitude (spectre d’amplitude : évolution de l’amplitude du signal en fonction de la fréquence). Le domaine occupé par l’amplitude du signal est appelé Bande spectrale. ΔF=Fmax – Fmin
Fmin Fmax On note aussi la fréquence moyenne : Fmoy=(Fmax+Fmin)/2. Et selon la valeur de Fmoy d’un signal, on trouve les classes spectrales suivantes : − Signaux basses fréquences (BF) : Fmoy < 250KHz. − Signaux hautes fréquences (HF) : 250 KHz ≤ Fmoy < 30 MHz. − Signaux très hautes fréquences (VHF) : 30 MHz ≤ Fmoy < 300 MHz. − Signaux ultra hautes fréquences (UHF) : 300 MHz ≤ Fmoy < 3 GHz. − Signaux super hautes fréquences (SHF) : Fmoy≥3 GHz.
VII. Signaux particuliers
1. Signal échelon u(t )
0 si t 0 u (t ) = 1 si t 0 u(0)=1/2.
Figure 6. Signal échelon
D’une manière générale, si x(t ) = A. u ( t − ) , alors x(t) est un signal signal échelon d’amplitude
A, et décalé de τ.
2. Signal rectangulaire rect (t )
1 1 si t rect (t ) = 2 0 si t 1 2
Acquisition et traitement numérique du signal 5
Chapitre 1 : Généralités sur l’acquisition et le traitement du Signal 1 1 Elle peut être définie comme : rect (t ) = u t + − u t − 2 2 1 1 1 Habituellement rect ( ) = rect (− ) = 2 2 2
Figure 7. Signal rectangulaire
t − D’une manière générale, si x(t ) = A. rect , alors x(t) est un signal rectangle d’amplitude A, centré sur τ et de largeur α.
τ-α/2 τ τ+α/2
Figure 8. Cas général de la fonction rectangulaire
3. Signal triangulaire tri(t ) ou (t )
1 − t si t 1 tri(t ) = 0 si t 1
1− t si 0 t 1 tri (t ) = 1 + t si − 1 t 0 0 sinon Figure 9. Signal triangulaire t − D’une manière générale, si x(t ) = A. tri , alors x(t) est un signal triangulaire d’amplitude A, centré sur τ et de largeur 2 α. t − A. tri
τ-α τ τ+α
Figure 10. Cas général de la fonction triangulaire
Acquisition et traitement numérique du signal 6
Chapitre 1 : Généralités sur l’acquisition et le traitement du Signal
4. Signal rampe r (t ) r (t ) = t u(t )
Figure 11. Signal rampe
D’une manière générale, si x(t ) = P. r ( t − ) , alors x(t) est un signal rompe de pente P, et décalé
de τ. Exemple d’application 1: Représenter les signaux suivants : 1. x1 ( t ) = u (t − 1)
2. x2 ( t ) = 2. u (t + 2)
t −1 3. x3 ( t ) = 2. rect ( ) 2 4. x4 ( t ) = 2. tri (t − 1)
5. x5 ( t ) = −r (t + 1)
5. Impulsion de Dirac (t )
L’impulsion de Dirac (t ) correspond à une fonction porte dont la largeur T tend vers 0 et dont l’aire vaut 1.
Figure 12. Impulsion de Dirac
Dans le cas général, on écrit : x(t ) = A. (t − ) avec A : amplitude et :décalage temporel Suite d’impulsions de Dirac : On appelle suite d’impulsions de Dirac ou peigne de Dirac une succession périodique d’impulsion de Dirac : k =+ repT (t ) = T (t ) = (t − kT ) ; T étant la période du peigne k =−
Elle est dite aussi fonction d’échantillonnage ou train d’impulsions.
Acquisition et traitement numérique du signal 7
Chapitre 1 : Généralités sur l’acquisition et le traitement du Signal