New version here : https://github.com/quichedood/DAWA-6.1
French official website project : http://dawa.panik-po.com/
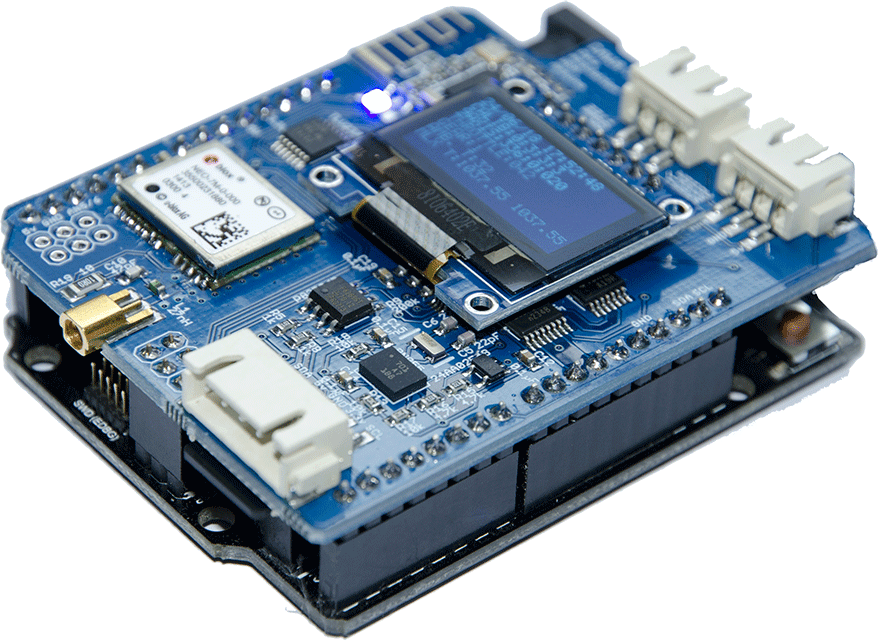
DAWA is an Arduino datalogger (and laptimer) shield for your motorbike. It records 10 times per seconds in a CSV file lots of information.
- Raw data acquisition : On Triumph bikes and many others, ECU values can be directly read (I personnaly use : RPM, SPEED, GEAR POSITION, THROTTLE and BRAKE state)
- Environement values : A 9-axis sensor (BNO055) is used to store G-forces and I hope soon, roll and pitch
- Position values : A UBLOX 10Hz GPS chip gets realtime coordinates
- Infrared temperatures : You can plug up to 4 infrared temperature sensors (tyres or ground t° for example)
- Analog inputs : You can measure up to 6 analog inputs (suspension sensors for exemple)
Everything is stored on a micro SD card.
10 times per seconds, a new line is created in a CSV file. This line contains every data values separated by a semicolon.
Current values are displayed in realtime on the OLED screen attached.
YES ! Since v4 and the integration of a 10Hz GPS chip, laptimer functions are available.
I couldn't make it easier !
Press the button start recording, press again stop recording :)
One CSV file is created on each new record.
A little bit more difficult, you have to put a file named "TRACKS.CSV" on the sdcard.
This file will contain track name and finishline coordinates, one line per track :
<trackname>;<finishline lat. A>;<finishline lon. A>;<finishline lat. B>;<finishline lon. B>
CAROLE;489799930;25224350;489800230;25226330
To keep precision, latitude and longitude should be converted to integers (multiply by 10 000 000).
When start recording the closer track is automatically chosen.
Bluetooth connection is usefull in these 2 cases :
- You just finish your track session and want to know lap times / best lap
- Before using DAWA, some parameters could be adjusted, use the bluetooth console to setup them !
I'm using "Serial Bluetooth Terminal" on Androïd. Connect and type "help" to view all available commands
- Laptimer split time : Add split time management
- Lean angle : Seems easy but in fact very complicated to obtain good values without drift
- /Arduino - The .ino file you need to put in the Arduino M0
- /Documentation - Some brief explanations about this shield (french - not translated)
- /Eagle Libraries - All Eagle parts I use in my schematics
- /Eagle Sources - Eagle files of this project
- /Gerber Sources - Last Gerber files, used to produce PCB
- /Partslist - A detailed BOM list