The 22nd Iranian Conference on Electrical Engineering (ICEE 2014), May 20-22, 2014, Shahid Beheshti University
A Genetic Algorithm Optimized Fuzzy Logic
Controller for UPFC in Order to Damp of Low
Frequency Oscillations in Power Systems
Roozbeh Torkzadeh
Power System Planning Center
Esfahan Regional Electric
Company
Esfahan, Iran
Roozbeh.Torkzadeh.1988@ieee.org
Hooman NasrAzadani
Department of Electrical and
Computer Engineering
University of Kurdistan
Sanandaj, Kurdistan, Iran
Hooman.NasrAzadani@stu.uok.ac.ir
Abstract—Due to the lack of damping torque, power system
disturbances such as step changes in input mechanical power,
may lead to Low Frequency Oscillations (LFO). Power System
Stabilizer (PSS) is a solution that has been used for many years in
order to mitigate these oscillations. Flexible AC Transmission
Systems (FACTs) is another solution for this problem. Among the
FACTs devices, Unified Power Flow Controller (UPFC) has an
excellent ability to control power flow, reduce sub-synchronous
resonance, and increase transient and dynamic stability and
therefore, may be used instead of PSS. In this paper, a Genetic
Algorithm Optimized Fuzzy Logic Controller (GA-FLC) is used
to control UPFC for damping low frequency oscillations. This
study is applied to a single-machine infinite-bus (SMIB) PhillipsHeffron model by using MATLAB®/ Simulink® software.
Simulation results explicitly show that the performance of the
proposed GA-FLC Based UPFC is better than using PSS and a
PI controlled UPFC in terms of damping LFO.
system damping of low frequency oscillations. PSSs have
proved to be efficient in performing their assigned tasks.
A wide spectrum of PSS tuning approaches has been
proposed. These approaches have included pole placement [1],
damping torque concepts [2], variable structure [3], and
different optimization and artificial intelligence techniques [4,
5]. However, PSS may adversely affect voltage profile and
may not be able to suppress oscillations resulting from severe
disturbances, such as three-phase faults at generator terminals
[6].
B. Flexible AC Transmission Systems
Flexible AC Transmission Systems (FACTS) have shown
very promising results when used to improve power system
steady-state performance. Unified power flow controller
(UPFC) is the most promising device in the FACTS concept.
It has the ability to adjust three control parameters, i.e. bus
voltage, transmission line reactance, and phase angle between
two buses. A major function of UPFC is to redistribute power
flow among transmission lines during steady state condition.
Furthermore, it can be used to improve damping of low
frequency oscillations during transients [7]. Gharedaghi et al.
presented a new method to damping of LFO based on fuzzy
logic controller [8]. Kadhim and Shrivastava investigated a
neuro-fuzzy controller to command a UPFC for enhancing
system stability by scaling down LFO [9].
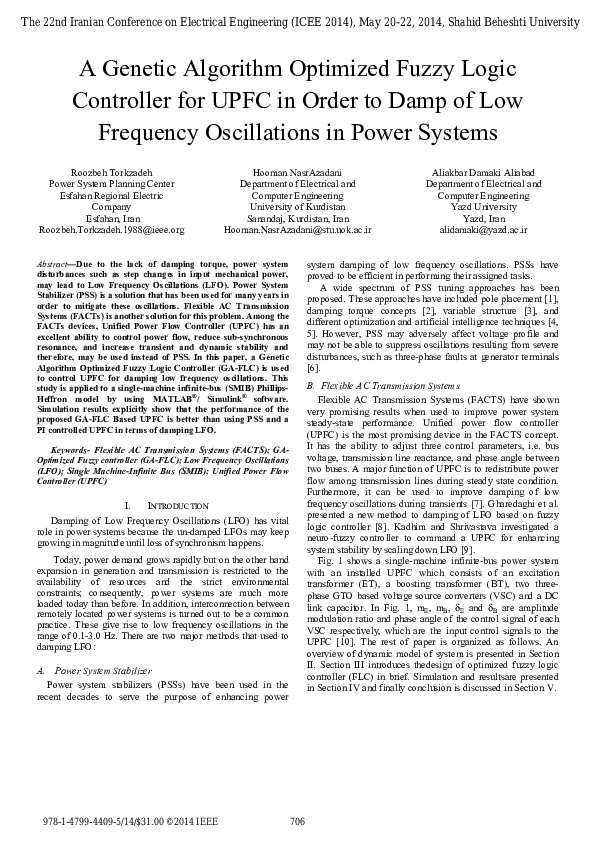
Fig. 1 shows a single-machine infinite-bus power system
with an installed UPFC which consists of an excitation
transformer (ET), a boosting transformer (BT), two threephase GTO based voltage source converters (VSC) and a DC
link capacitor. In Fig. 1, mE, mB, δE and δB are amplitude
modulation ratio and phase angle of the control signal of each
VSC respectively, which are the input control signals to the
UPFC [10]. The rest of paper is organized as follows. An
overview of dynamic model of system is presented in Section
II. Section III introduces thedesign of optimized fuzzy logic
controller (FLC) in brief. Simulation and resultsare presented
in Section IV and finally conclusion is discussed in Section V.
Keywords- Flexible AC Transmission Systems (FACTS); GAOptimized Fuzzy controller (GA-FLC); Low Frequency Oscillations
(LFO); Single Machine-Infinite Bus (SMIB); Unified Power Flow
Controller (UPFC)
I.
INTRODUCTION
Damping of Low Frequency Oscillations (LFO) has vital
role in power systems because the un-damped LFOs may keep
growing in magnitude until loss of synchronism happens.
Today, power demand grows rapidly but on the other hand
expansion in generation and transmission is restricted to the
availability of resources and the strict environmental
constraints; consequently, power systems are much more
loaded today than before. In addition, interconnection between
remotely located power systems is turned out to be a common
practice. These give rise to low frequency oscillations in the
range of 0.1-3.0 Hz. There are two major methods that used to
damping LFO:
A. Power System Stabilizer
Power system stabilizers (PSSs) have been used in the
recent decades to serve the purpose of enhancing power
978-1-4799-4409-5/14/$31.00 ©2014 IEEE
Aliakbar Damaki Aliabad
Department of Electrical and
Computer Engineering
Yazd University
Yazd, Iran
alidamaki@yazd.ac.ir
706
�B. SMIB Dynamic Model
A linearized Phillips-Heffron Model is used for dynamic
modelling of Single Machine-Infinite Bus (SMIB). Equations
(7), (8), (9) and (10) represent state equations of SMIB:
δ$ = ωb (ω − 1)
(7)
ω$ =
Fig. 1. Installed UPFC on Single-Machine Infinite-Bus (SMIB) power
system
II.
A. UPFC Dynamic Model
By applying Park’s transformation on three-phase dynamic
differential equations of the UPFC and ignoring the resistance
and transients of the transformers, the dynamic equations of
the UPFC are demonstrated as below [10,11].
⎡ mE cos(δ E )vdc ⎤
− xE ⎤ ⎡iEd ⎤ ⎢
⎥
2
⎢ ⎥+
0 ⎥⎦ ⎣iEq ⎦ ⎢⎢ mE sin(δ E )vdc ⎥⎥
2
⎦
⎣
⎡VBtd ⎤ ⎡ 0
⎢V ⎥ = ⎢
⎣ Btq ⎦ ⎣ xB
⎡ mB cos(δ B )vdc ⎤
− xB ⎤ ⎡iBd ⎤ ⎢
⎥
2
⎢ ⎥+
0 ⎥⎦ ⎣iBq ⎦ ⎢⎢ mB sin(δ B )vdc ⎥⎥
2
⎦
⎣
iEd =
m sin(δ B )vdc
xBB
+ xd 5vb cos(δ )
Eq′ + xd 7 B
xd 2
2
+ xd 6
mE sin(δ E )vdc
2
iEq = xq 7
iBd =
iEd
mB cos(δ B )vdc
+ xq 5vb sin (δ )
2
xE
x m sin(δ B )vdc
+ xd 3vb cos(δ )
Eq′ − d 7 B
xd 2
xd 2
2
x m cos(δ B )vdc
= q1 B
+ xq 3vb cos(δ )
2
xq 2
+ xq 4
(8)
E − ( xd − x′d )id − Eq′
E$ q′ = fd
Tdo′
(9)
K (V − v) − E fd
E$ fd = A ref
TA
(10)
Where Pe= vdid+vqiq, v= (vd2+ vq2)0.5,vd=xqiq,vq=E'q-x'd.id,
id=iBd+iEd, iq=iBq+iEq also Pm and Pe are the input and output
power, respectively; M and D are inertia constant and damping
coefficient; ωb is synchronous speed; δ and ω are the rotor
angle and speed; E'q, E'fd, and v are generator internal, field and
terminal voltages; T'do is open circuit field time constant; xd, x'd,
and xq are d-axis reactance, d-axis transient reactance, and qaxis reactance, respectively; KA and TA are exciter gain and time
constant; Vref is reference voltage.
SYSTEM DYNAMIC MODEL
In order to determine a dynamic model for SMIB with
UPFC, dynamic equations of each part are calculated
separately. At first, the dynamic equations of UPFC are
presented to determine UPFC dynamic model, and then
dynamic equations of SMIB in absence and presence of UPFC
are presented.
⎡VEtd ⎤ ⎡ 0
⎢V ⎥ = ⎢
⎣ Etq ⎦ ⎣ xE
Pm − Pe − D(ω − 1)
M
In order to apply UPFC into Phillips-Heffron Model,
another state equation is needed [10], which is (11).
v$dc =
⎡i ⎤
⎡i ⎤
3mE
[cos(δ E ) sin(δ E )]⎢ Ed ⎥ + 3mB [cos(δ B ) sin(δ B )]⎢ Bd ⎥
i
4
4Cdc
C
dc
⎣iBq ⎦
⎣ Eq ⎦
(11)
Where vEt, iE, vBt, and iB are the excitation voltage, the
excitation current, the boosting voltage, and the boosting
current. Also, Cdc and vdc are the capacitance and voltage of the
DC link, respectively.
(1)
C. Linearizing Power System Dynamic Model
In order to use linearized Phillips-Heffron Model non-linear
dynamic equations should be linearized around the operating
point. The linearized model is assumed by (12):
(12)
x$ = Ax + Bu
(2)
(3)
Where the state vector x, the control vector u, and the
matrices A and B are shown in (13), (14), (15) and (16):
[
x = Δδ
(4)
u = [Δ m E
(5)
⎡ 0
⎢ k
⎢ − 1
⎢ M
⎢ k
A=⎢ − 4
Tdo′
⎢
k
⎢− A k 5
⎢ TA
⎢ k
⎣ 7
(6)
mE cos(δ E )vdc
2
Where xE and xB are the Et and Bt reactances, respectively;
the reactances xqE, xdE, xBB, xd1 to xd7, and xq1 to xq7 are as
shown in [12].
707
Δ E q′
Δω
Δδ E
ωb
D
−
M
0
0
0
Δ E fd
T
T
0
0
1
Tdo′
1
−
TA
0
−
]
Δδ B ]
Δm B
0
k
− 2
M
k
− 3
Tdo′
k k
− A 6
TA
k8
Δ v dc
0 ⎤
k pd ⎥
−
⎥
M ⎥
k qd ⎥
−
Tdo′ ⎥
⎥
k k
− A vd ⎥
TA ⎥
− k 9 ⎥⎦
(13)
(14)
(15)
�⎡ 0
⎢ k pe
⎢ −M
⎢ k
qe
B=⎢ −
⎢ Tdo′
⎢ k Akve
⎢−
⎢ TA
⎣⎢ kce
−
0
k pδe
M
kqδe
−
Tdo′
k Akvδe
−
TA
kcδe
−
0
k pb
M
kqb
−
Tdo′
k Akvb
−
TA
kcb
0 ⎤
k pδb ⎥
−
M ⎥
kqδb ⎥
⎥
−
Tdo′ ⎥
k k ⎥
− A vδb ⎥
TA ⎥
kcδb ⎦⎥
For this purpose, four separate fuzzy logic controllers are
used to control ∆mB, ∆mE, ∆δB, ∆δE. Each one has two inputs
that are ∆δ and ∆ω and one output that controls ∆mB, ∆mE, ∆δB,
∆δE. Optimization fitness function is presented in (17).
F = 12 f 1 + f 2 + f 3 + 100 f 4
(17)
Where f1 is the maximum overshoot, f2 is the settling time, f3
is the zero crossing and f4 is the average of output signal.
Weighting coefficients are selected by trial and error.
Convergence characteristics of PSO and GA
Optimizations are shown in Fig. 3. According to this figure, it
is clear that the GA Optimization has a better performance to
minimize fitness function in comparison to the PSO.
Consequently, the GA optimized fuzzy logic controller is
proposed in this paper.
The procedure of the proposed genetic algorithm in this
work is given below:
a) Generate randomly a population of parameter strings
to form primary population. The population number
of each generation is assumed 40 and each individual
in population has 48 gens.
b) Calculate the fitness function as given in (17) for
each individual in the population.
c) Choose parents by applying selection function.
Roulette wheel is used as selection function.
d) Apply crossover function on parents in order to create
next generation. 0.8 is assumed as crossover fraction.
e) Apply mutation function on new population. A
uniform function with the rate of 0.02 is assumed as
mutation function.
f) Compute the children and parents finesses.
g) If the stopping criteria satisfied, optimization will
stop, otherwise; return to step (c). Number of
iterations is used as the stopping criteria and the
maximum value of it is assumed as 150.
(16)
Where ∆δ and ∆ω are the linearized rotor angle and angular
velocity; ∆E’q, ∆E'fd and ∆vdc are the linearized generator
internal voltage, the linearized generator field voltage and the
linearized DC link voltage, respectively. Also k-constants are
linearization constants that are calculated as shown in Table I.
Also the schematic diagram of dynamic model of the SMIB
with UPFC is shown in Fig. 2 [10, 11].
III. DESIGN OF OPTIMIZED FUZZY LOGIC CONTROLLER
In this section, the design procedure of GA Optimized
fuzzy logic controller is presented. In this research, Genetic
Algorithm (GA) and also Particle Swarm Optimization (PSO)
are used to design an optimum fuzzy logic controller in order
to reach the best dynamic performance of the power system.
Table I - K-CONSTANTS OF LINEARIZING
k5 = ∂Vt ∂δ
k =∂V$ ∂V
k6 = ∂Vt ∂Eq′
k3 = ∂Eq ∂Eq′
k7 = ∂V$dc ∂δ
k 4 = ∂Eq ∂δ
k8 = ∂V$dc ∂Eq′
dc
kpd = ∂Pe ∂Vdc
kqd =∂Eq ∂Vdc
kpe = ∂Pe ∂mE
kqe = ∂Eq ∂mE
kve = ∂Vt ∂mE
kpδe =∂Pe ∂δE
kqδe = ∂Eq ∂δ E
kvδe = ∂Vt ∂δ E
kvd = ∂Vt ∂Vdc
kce = ∂V$dc ∂mE
k = ∂V$ ∂δ
kpb =∂Pe ∂mB
kqb =∂Eq ∂mB
kvb = ∂Vt ∂mB
kpδb = ∂Pe ∂δ B
kqδb = ∂Eq ∂δ B
kvδb = ∂Vt ∂δ B
k1 = ∂Pe ∂δ
k2 = ∂Pe ∂Eq′
9
dc
cδe
dc
E
kcb =∂V$dc ∂mB
k = ∂V$ ∂δ
cδb
dc
B
Fig. 2. Schematic of linearized Phillips-Heffron model with applying UPFC
708
�Fig. 6. Fuzzy Logic Controller Structure
IV.
SIMULATION AND RESULTS
In this research, a single machine infinite bus system is
selected for/as a case study and simulated in MATLAB®/
Simulink®. The specification of the simulated system is
presented in Appendix. Simulations have been done for four
different cases and the rotor angel deviation (∆δ) is illustrated
for each case as following.
Fig. 3. Convergence characteristics of PSO and GA
Fuzzy system rule’s consequents and input/output scale
factors of FLC are optimized by GA. The fuzzy system
membership functions for input and output are shown
respectively in 4 and 5.
A. Case A. SMIB in absence of PSS and UPFC
In this case a SMIB is simulated with a 0.1 p.u step change
disturbance in mechanical power at time = 2 sec that last for
0.5 sec. Neither PSS nor UPFC is connected to the system.
The simulation result is presented in Fig. 11. As shown in this
figure the LFO keep growing in magnitude and the system is
not stable.
B. Case B. SMIB with PSS
In order to damping LFOs in case B a PSS is designed and
connected to SMIB. For designing the stabilizer, the
transformation function between PSS output and e'q state variable
is obtained as (18).
GE =
k Ak3
(1 + sTA )(1 + sTd′0 k 3 ) + k A k 3 k 6
(18)
By applying s=jωn the lagging property of GE which is
considered as phase angle is calculated. In this condition, the
lagging property of GE is achieved more than 45° and therefore,
the PSS should contain two compensation blocks. Kpss and T1
could also be calculated according to (19), (20), (21) and (22)
[13].
Fig. 4. Membership function for ∆δ and ∆ω
Fig. 7. ∆δ deviations of SMIB without PSS and UPFC
Fig. 5. Membership function of controller output signal
709
�Table II - OPTIMAL VALUES OF KP AND KI FOR PI CONTROLLER
Optimum
Values
∆mE
Controller
∆δE
Controller
∆mB
Controller
∆δB
Controller
KP
KI
-0.8574
-0.2306
-0.0074
-0.0530
0.1040
-0.0631
-0.3164
-0.1058
Fig. 8. PSS block structure
∠G E ( jω n ) = 2γ , γ < 0
1 + jω nT1
+γ = 0
1 + jω nT2
tan (tan −1 (ω n T2 ) − γ )
T1 =
ωn
∠
(19)
(20)
(21)
2ξω n M
k pss =
k2
1 + jω nT1
G E ( jω n )
1 + jω nT2
(22)
Where kpss is the DC gain of PSS, ξ is the damping
coefficient, T, T1 and T2 are the time constants of reset block
and PSS block, respectively. T=3 sec, T2=0.2 sec are assumed
in order to calculate T1 and kpss. The Calculated values are
T1=0.7305 sec and kpss =7.408. Also, the PSS structure is
shown in Fig. 12. By applying the designed PSS to the
generator the deviation of the rotor angel is calculated again
and shown in Fig 13. As shown in this figure the system has
been stable in this condition.
Fig. 10. ∆δ deviations of SMIB with PI Controlled UPFC
D. Case D. SMIB with UPFC controlled by PSO-FLC and
GA-FLC on ∆mB, ∆mE, ∆δB, ∆δE
In this case, a separate fuzzy logic controller is used to
control each UPFC inputs. Moreover, the fuzzy rules and
fuzzy system inputs and output scale factors are optimized by
GA and PSO. The GA-optimization parameters are calculated
and shown in Table III. Using these parameters, the variation
of ∆δ becomes as Fig. 15.
In order to realize the applicability of the proposed method
some comparisons have been made between four cases and
presented in Fig 16, 17 and 18. Also, the Eigen values of
system in each case are presented in Table IV. As seen from
these results, the proposed method i.e. GA-FLC has the best
performance among the other methods. The figures show that
applying the proposed method leads to the lowest settling time
and the lowest LFO amplitude in comparison with PSS, GA
optimized PID and PSO-FLC.
C. Case C. SMIB with UPFC controlled by a PI controller on
∆mB, ∆mE, ∆δB, ∆δE
In this case, a PI Controlled UPFC is added to the SMIB in
order to damp LFO. The PI Controller is used to control ∆mB,
∆mE, ∆δB, ∆δE. The KP and KI coefficients of each controller
is optimized with Genetic Algorithm and presented in Table
II. In this condition, the deviation of ∆δ is calculated and
shown in Fig. 14. This figure shows the good ability of UPFC
for LFO damping.
Fig. 11. Comparison between GA-FLC and PSO-FLC for UPFC
Fig. 9. ∆δ deviations of SMIB with PSS
710
�Table III - GA OPTIMIZATION RESULTS
Fig. 12. Comparison between GA-FLC and SMIB without PSS and UPFC
Optimum
∆mE
∆δE
∆mB
∆δB
Values
Controller
Controller
Controller
Controller
Rule#1
SP
LP
SP
LP
Rule#2
ZE
ZE
SN
SN
Rule#3
SP
SN
ZE
ZE
Rule#4
SP
LN
SP
LP
Rule#5
ZE
ZE
ZE
ZE
Rule#6
SN
SP
SN
LN
Rule#7
ZE
ZE
SP
SP
Rule#8
ZE
SP
ZE
SN
Rule#9
SP
LP
ZE
SP
∆ω Scale Factor
2.2284
4.9985
9.9947
8.2858
∆δ Scale Factor
7.3532
5.6136
7.5353
3.0665
U Scale Factor
4.7338
5.9043
9.1695
0.6036
Table IV- EIGEN VALUES OF CASE A, B, C AND D
Eigen Values of
Eigen Values
each case
Fig. 13. Comparison between GA-FLC and PSS
SMIB
SMIB with PSS
SMIB with UPFC by
GA-PI
SMIB with UPFC by
GA-FLC
Fig. 14. Comparison between GA-FLC and GA-PI Controller
711
0.6020 + 5.7108i
0.6020 - 5.7108i
-10.9470 + 0.6832i
-10.9470 - 0.6832i
-22.0021
-2.0813 +11.3023i
-2.0813 -11.3023i
-0.8463 + 3.3524i
-0.8463 - 3.3524i
-2.8297
-0.3363
-9.4145 + 9.0518i
-9.4145 - 9.0518i
-0.5655 + 6.0558i
-0.5655 - 6.0558i
-0.4531
-0.0588
-10.2324 + 9.2265i
-10.2324 - 9.2265i
-0.6304 + 6.9834i
-0.6304 - 6.9834i
-0.3163
�V.
[6]
CONCLUSION
In this paper, an Optimized GA-FLC controller is proposed for
UPFC to mitigate low frequency oscillations. The controller
was designed for a single machine infinite bus system. Then
the simulation results for the system including SMIB, SMIB
with PSS, SMIB with PI controlled UPFC and SMIB with
GA-FLC controlled UPFC were presented. Simulations were
performed for 0.1 p.u step change in mechanical power and
0.5 sec duration. The simulation results explicitly showed that
the proposed GA-FLC has good performance to reduce
settling time and reduce amplitude of LFO in comparison with
PSS, GA optimized PID and PSO-FLC.
[7]
[8]
[9]
[10]
[11]
ACKNOWLEDGMENT
R.Torkzadeh and H.NasrAzadani would like to express
their gratitude to honourable faculties of Yazd University and
University of Kurdistan especially to Dr A.R. Sedighi Anaraki
and Dr A. Hesami Naghsh-Bandi and also would like to thank
Dir. F.Eghtedarnia, Dr E.Karimi and their other colleagues in
EREC's technical planning center due to their supports.
[12]
[13]
APPENDIX
Roozbeh Torkzadeh (S'14) was born in Esfahan,
Iran, on 1988. He received his B.S. in electrical
engineering from Islamic Azad University of Najaf
Abad in 2011 and M.S. (Hon.) degree in electrical
engineering from Yazd University in 2013. Currently
he is with the Esfahan Regional Electric Company
(EREC) as the protection and planning expert and he
is a member of EREC Reliability Council's VoLL and
RCM workgroups. He was also with Islamic Azad
University of Naein as a part time lecturer.
His major interests are protection, expansion planning and reliability of
power systems, dynamics of power systems and application of computational
intelligence to power system problems.
The values for example SMIB system are:
Poles=2; f=60 Hz; PFrated=0.85 pu; Vrated=26 kV; Prated=835
MW; rs=0.003, xd=1.8, xq=1.8, xls=0.19, r'fd=0.000929,
x'lfd=0.1414, r'kd=0.01334, x'lkd=0.08125, r'kq1=0.00178,
r'kq2=0.00841, x'lkq1=0.8125, x'lkq2=0.0939 pu; D=0, H=5.6,
Rline=0.05, Xline=0.5, Glocal=0.25,
Blocal=-0.25 pu.
AVR parameters are:
KA=50, TA=0.05 sec.
UPFC and PSS parameters are:
xtE=0.3, xE=0.5, xL=0.3, xB=0.01, xBv=0.3, Cdc=1 pu; Vdc0=2
pu, mE=0.4013, mB=0.0789, δE=-85.3478,
δB=-78.21;T1=0. 73 sec, T2=0.2 sec, T=3 sec, kpss =7.408.
Hooman NasrAzadani was born in Esfahan, Iran, on
September 18, 1988. He received his B.S. in electrical
engineering from Islamic Azad University of Najaf
Abad in 2011 and M.S. degree in electrical
engineering from University of Kurdistan in 2013.
Currently he is with the Esfahan Regional Electric
Company (EREC) as a Consultant and also he is a
member of EREC Reliability Council's VoLL and
RCM workgroups. His research interests include
power system stability/control and protection, power
system dynamics and application of computational
intelligence to power system problems.
REFERENCES
[1]
[2]
[3]
[4]
[5]
A. R. Mahran, B. W. Hogg, and M. L. El-Sayed, "Co-ordinated control
of synchronous generator excitation and static VAR compensator," IEEE
Transactions on Energy Conversion, vol. 7, pp. 615-622, 1992.
A. T. Al-Awami, M. A. Abido, and Y. L. Abdel-Magid, "Application of
PSO to design UPFC-based stabilizers," in Swarm Intelligence, Focus on
Ant and Particle Swarm Optimization, F. T. S. C. a. M. KumarTiwari,
Ed., ed, 2007.
F. Gharedaghi, M. Deysi, and H. Jamali, "A New Method to Damping of
Low Frequency Oscillations," Australian Journal of Basic and Applied
Sciences, vol. 5, pp. 1231-1238, 2011.
K. H. Kadhim and J. Shrivastava, "Commanding UPFC with Neurofuzzy for Enhancing System Stability by Scaling down LFO," Global
Journal of Advanced Engineering Technologies, vol. 1, p. 5, 2012
W. Haifeng, "A unified model for the analysis of FACTS devices in
damping power system oscillations. III. Unified power flow controller,"
Power Delivery, IEEE Transactions on, vol. 15, pp. 978-983, 2000.
S. Johri, S. S. Tanwar, and A. Khandelwal, "Analysis Of Upfc Based
Damping Controller On A Single Machine Infinite Bus System
(SMIB)," International Journal of Engineering Sciences & Research
Technology, vol. 4, p. 9, 2012.
M. A. Abido, A. T. Al-Awami, and Y. L. Abdel-Magid, "Analysis and
Design of UPFC Damping Stabilizers for Power System Stability
Enhancement," in Industrial Electronics, 2006 IEEE International
Symposium on, pp. 2040-2045, 2006.
Y. N. Yu, Electric Power System Dynamics: Academic Press, pp.85-86,
1983.
C.L. Chen and Y.-Y. Hsu, "Coordinated Synthesis of Multimachine
Power System Stabilizer Using an Efficient Decentralized Modal
Control (DMC) Algorithm," IEEE Transactions on Power Systems, vol.
2, pp. 543-550, 1987.
J M. J. Gibbard, "Co-ordinated design of multimachine power system
stabilisers based on damping torque concepts," Generation,
Transmission and Distribution, IEE Proceedings C, vol. 135, pp. 276284, 1988.
V. G. D. C. Samarasinghe and N. C. Pahalawaththa, "Damping of
multimodal oscillations in power systems using variable structure
control techniques," IEE Proceedings - Generation, Transmission and
Distribution, vol. 144, p. 323, 1997.
Y. L. Abdel-Magid, M. A. Abido, S. Al-Baiyat, and A. H. Mantawy,
"Simultaneous stabilization of multimachine power systems via genetic
algorithms," IEEE Transactions on Power Systems, vol. 14, pp. 14281439, 1999.
M. A. Abido, "Particle swarm optimization for multimachine power
system stabilizer design," in Power Engineering Society Summer
Meeting, 2001, pp. 1346-1351 vol.3.
Aliakbar Damaki Aliabad was born in Yazd, Iran,
on April 9, 1983. He received his B.S., M.S., and
Ph.D.
degrees in electrical engineering from
Amirkabir University of Technology, Tehran, Iran in
2005, 2007, and 2012 respectively. He is currently
Assistant Professor at Electrical and Computer
Faculty of Yazd University, Yazd, Iran. His main
interests are design, manufacturing, and fault
detection of electrical machines, and also power
system dynamics.
712
�
 Roozbeh Torkzadeh
Roozbeh Torkzadeh