80
IEEE TRANSACTIONS ON SIGNAL PROCESSING, VOL. 48, NO. 1, JANUARY 2000
A Feedback Approach to the Steady-State
Performance of Fractionally Spaced Blind Adaptive
Equalizers
Junyu Mai and Ali H. Sayed, Senior Member, IEEE
Abstract—This paper proposes a new approach to the analysis
of the steady-state performance of constant modulus algorithms
(CMA), which are among the most popular adaptive schemes
for blind equalization. A major feature of the proposed feedback
approach is that it bypasses the need for working directly with
the weight error covariance matrix. In so doing, approximate
expressions for the steady-state mean-square error of several CM
algorithms are derived, including CMA2-2, CMA1-2, normalized
CMA, and a new normalized CMA variant with less bias. A
comparison among the various algorithms is also performed,
along with several simulation results. The conclusions confirm the
superior performance of CMA2-2.
Index Terms—Adaptive filter, blind equalization, constant modulus signal, feedback analysis, mean-square error.
CMA2-2, CMA1-2, normalized CMA, and a new normalized
CMA variant with less bias). A comparison among the various
algorithms is also performed, along with several simulation results. Our conclusions will further confirm the superior performance of CMA2-2.
The approach in this paper exploits a fundamental energypreserving relation that, in fact, holds for a general class of adaptive filters and not just CM algorithms [6]. This relation allows
us to avoid working directly with the nonlinear update that is
characteristic of CM algorithms; it focuses instead on the propagation of error energies through a feedback structure that consists of a lossless feedforward block and a feedback path.
A. Earlier Results in the Literature
I. INTRODUCTION
A
MONG the most popular adaptive schemes for blind
equalization are the so-called constant modulus algorithms (CMA’s); see [1]–[3] and the many references therein.
The update equations of these algorithms are nonlinear in
nature, which may explain why only a handful of results
are available in the literature regarding their steady-state
mean-square-error performance. The difficulty arises from the
fact that classical approaches to steady-state performance evaluation often require, as an intermediate step, that a recursion
be determined for the covariance matrix of the weight error
vector. This step can become a burden for CM algorithms due
to their inherent nonlinear updates (see, e.g., the analysis of the
constant modulus array algorithm for adaptive beamforming in
[4] and the analysis of the performance of CMA for interference
cancellation in [5, Sec. 3.3]).
The main objective of this paper is to propose a new approach
to the analysis of the steady-state performance of blind adaptive algorithms. A major feature of the approach is that it bypasses the need to work directly with the weight error vector.
In so doing, approximate expressions for the steady-state meansquare error of several CM algorithms are derived (including
Some of the earlier results in the literature on the performance
of CM algorithms that are relevant to the discussion in this paper
appear in [9]–[13]. The survey article [3] provides a comprehensive list of further additional references on different aspects
of CM algorithms. Shynk et al. [10] obtain some of the earliest approximations for the mean-square error of the so-called
CMA2-2 variant, under the assumption of Gaussian regression
vectors. This assumption may not be justified for many communication channels, and the derivation in this paper will provide
expressions that result in better approximations for generic regression vectors. Bershad and Roy [11] wrote an early work on
the performance of CMA2-2, albeit for a particular class of input
signals that are modeled by Rayleigh fading sinusoids. Zeng and
Tong [12] studied the mean-square-error of the optimal CM receiver, viz., of the receiver that results by minimizing the CM
cost function. The effects of adaptation and gradient noise are
not considered. By an ingenious use of Lyapunov stability and
averaging analysis, Fijalkow et al. [13] obtain an approximate
expression for the mean-square error of CMA2-2 that is related
to one of our results; though less accurate (see the simulation
and comparison results in Section IV-E).
B. Organization of the Paper
Manuscript received November 20, 1998; revised June 20 1999. This work
was supported in part by the National Science Foundation under Awards MIP9796147 and CCR-9732376. The associate editor coordinating the review of
this paper and approving it for publication was Dr. Xiang-Gen Xia.
J. Mai was with the Electrical Engineering Department, University of California, Los Angeles, CA 90024 USA. She is now with the Advanced Research
Department, St. Jude Medical Cardiac Rhythm Management Division, Sylmar,
CA 91342 USA.
A. H. Sayed is with the Electrical Engineering Department, University of
California, Los Angeles, CA 90024 USA (e-mail: sayed@ee.ucla.edu).
Publisher Item Identifier S 1053-587X(00)00099-4.
The paper is organized as follows. In the next section, we describe the fractionally spaced model adopted in this paper in addition to some of the CM algorithms that we study here. In Section III-B, we motivate and derive the energy-preserving relation
and then apply it to CMA2-2. In Sections V and VI, we extend
the analysis to CMA1-2 and to normalized CMA. We also develop a normalized CM algorithm with less bias than known
normalized variants. Throughout the paper, we provide several
1053–587X/00$10.00 © 2000 IEEE
�MAI AND SAYED: FEEDBACK APPROACH TO THE STEADY-STATE PERFORMANCE OF FRACTIONALLY SPACED EQUALIZERS
81
simulations that compare the theoretical results predicted by our
expressions with experimental values. In the concluding section,
we compare the various algorithms.
-FRACTIONALLY-SPACED MODEL
II. THE
Equalization algorithms can be implemented in
symbol-spaced form [also called Baud- or T-spaced equalizer
form (TSE)] or in fractionally spaced form (FSE). In this paper,
we concentrate on fractionally spaced implementaions due to
their inherent advantages (see, e.g., [2], [3], [14]–[16]). Thus,
and an FIR equalizer
consider an FIR channel of length
of length
. We split the coefficients of the channel into
even- and odd-indexed entries and denote them by
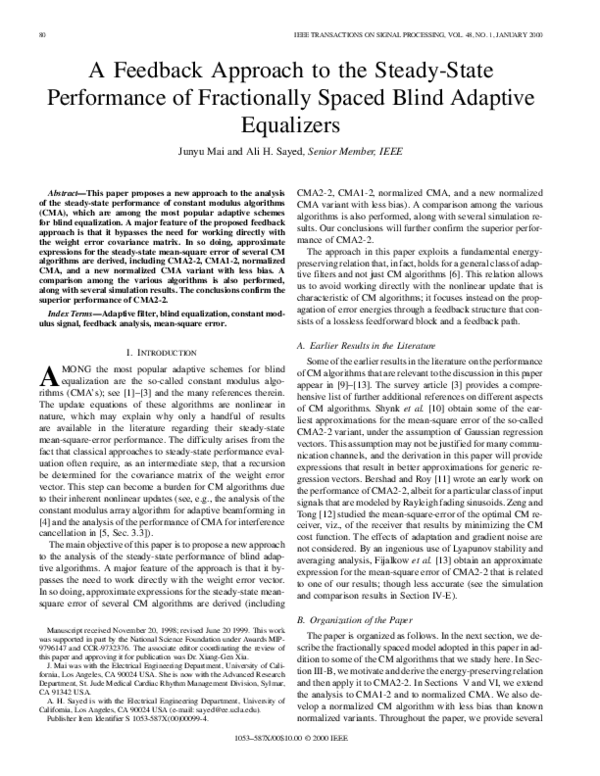
Fig. 1.
Multichannel model for T =2-FSE.
and
(3)
and
then we also have
.
A. Perfect Equalization
An important result for such fractionally spaced equalizers
and
denote the
is the following (see, e.g., [3]). Let
polynomials associated with the even- and odd-indexed subchannels
The vectors and are the impulse responses of the two subchannel blocks shown in Fig. 1. In a similar way, we define the
two subequalizers
which are the impulse responses of the two subequalizer blocks
shown in the same figure. The system in Fig. 1 then corresponds
-fractionally
to what is called a multichannel model for a
spaced equalizer. This model is well motivated and explained in
the survey article [3].
of the combined channel-equalizer system
The output
can be expressed in terms of the transmitted signal
as
prewindowed Toeplitz
follows. Introduce the
matrix
..
.
..
.
..
.
..
.
..
.
..
and similarly for
matrix
.
. Then, define the
, the equalizer vector
Then, it can be shown that if these polynomials do not have
common zeros, and if
, then there exists an equalizer
that leads to an overall channel-equalizer impulse response of
the form
col
(4)
, and where the unit
for some constant phase shift
. Equalizers
entry is in some position ,
that result in overall impulse responses of the above form
.
are called zero-forcing equalizers and will be denoted by
Thus, under such conditions, the output of the channel-equalizer
for some
.
system will be of the form
The multichannel model of Fig. 1 is the model we are going
-fractionally
to study in future sections. For more general
spaced equalizers, we end up with a similar model with subchannels and subequalizers (see, e.g., [15] and [16]), and the
results in this paper can be readily extended to this context.
B. Constant Modulus Algorithms
..
.
channel
and the input signal vector
Then,
. If we further let
and
denote the
and , respectively, and
input signals to the subequalizers
define the row input vectors
(1)
(2)
We thus see that under a length-and-zero condition, a
finite-length FSE can perfectly equalize a noise-free FIR
channel. A blind adaptive equalizer is one that attempts to
approximate a zero forcing equalizer without knowledge of
the channel impulse response and without direct access to the
itself. This is achieved by seeking
transmitted sequence
to minimize certain cost functions that are carefully chosen so
that their global minima occur at zero forcing equalizers.
The most popular adaptive blind algorithms are the so-called
constant modulus algorithms [17], [18]. They are derived as stochastic gradient methods for minimizing the cost function
(5)
where denotes the weight vector to be estimated, and the constant
is suitably chosen in order to guarantee that the global
occur at zero forcing solutions (see, e.g.,
minima of
[15], [17], and [19]).
�82
IEEE TRANSACTIONS ON SIGNAL PROCESSING, VOL. 48, NO. 1, JANUARY 2000
In the next two sections, we study the following two variants:
CMA2-2 and CMA1-2. In a later section, we study other variants (known as normalized CM algorithms).1
CMA2-2: In this case, we select
(6)
A. The Mean-Square Error
denote the zero forcing solution that gives
for some
. This is guaranteed to exist under
some length-and-zero conditions. Now, due to gradient noise,
that is distinct
the adaptive equalizer will yield an output
from
. Let
denote the resulting (a priori) estimation
error as
Let
and the update equation for the weight estimates is given by
(7)
with a step-size µ and where now,
of the adaptive equalizer. Here, the symbol
conjugate transposition.
CMA1-2: In this case, we select
is the output
denotes complex
(8)
One measure of filter performance is the steady-state meansquare error (MSE)
MSE
which is clearly dependent on
. It is common in the literature to evaluate this MSE as follows. We first assume that the
is independent of
.2 Then, under this
regression vector
assumption, the above expression for the MSE becomes
and the update equation for the weight estimates is given by
Trace
MSE
(9)
Since these algorithms are based on instantaneous approxi,
mations of the true gradient vector of the cost function
need not converge to a zero forcing sothe equalizer output
due to the presence of gradient
lution of the form
noise. In the following sections, we derive expressions for the
steady-state mean-square error
(10)
and, assuming stationarity,
.3
where
It is thus customary to determine the steady-state MSE by first
determining the steady-state mean-square deviation (MSD) defined by
Trace
Trace
(11)
This method of evaluation can become a burden for adaptive algorithms that involve nonlinear updates in , as is the case with
blind adaptive algorithms. We now describe a new approach for
that bypasses the need for studying
evaluating
and its limit.
for adaptive algorithms of the CM class.
B. A Fundamental Energy-Preserving Relation
III. A NEW APPROACH FOR STEADY-STATE ANALYSIS
As mentioned in the introduction, and as can be seen from the
above equations, the updates for CM algorithms are nonlinear
in the weight estimates . This may explain why only a few
results are available in the literature regarding the steady-state
performance of this class of algorithms. The difficulty is because for other adaptive schemes (e.g., of the LMS family), it
is common to compute steady-state results by first determining
measured
recursions for the squared weight error energy
relative to some zero-forcing solution, say,
(see, e.g., [20]–[23]). This step is a burden for CM algorithms
as well as for several other adaptive schemes, due to their nonlinear updates.
Our objective is to propose a new approach for evaluating the
steady-state mean-square error of CM algorithms without re. We motiquiring explicit expressions or recursions for
vate our approach by first explaining the conventional method
for evaluating the mean-square error and by showing the difficulty it encounters when dealing with adaptive filters with nonlinear updates.
our notation, we use parenthesis to refer to scalar variables, e.g., s(i) or
or u . This convention
helps distinguish between scalar and vector quantities.
1In
y(i) and subscripts to refer to vector quantities, e.g., w
The approach is based on a fundamental energy-preserving
relation [cf. (20) further ahead], which actually holds for very
general adaptive schemes and not just CM algorithms, as explained in [6]. This energy relation was noted and exploited by
Sayed and Rupp in [26]–[29] in studies on the robustness and
-stability of adaptive filters from a deterministic point of view
(see [29]). We review this result below and prepare the notation
for later sections.
Consider a general stochastic algorithm of the form
(12)
denotes an instantaneous error, and
a nonzero
where
(row) regression vector. CM algorithms are a special case of the
2We are not going to impose this condition in our derivation. We are simply
using it here to demonstrate the common approach in the literature. We may
add that although not true in general, especially for tapped-delay adaptive filter
structures, this condition is actually a part of certain widely used independence
assumptions in adaptive filter theory [20]. It was shown in [24] and [25], for
instance, that for LMS-type scenarios, and for sufficiently small step- sizes, the
conclusions that can be obtained from such independence assumptions tend to
match reasonably well the real filter performance.
3Since we assume in this paper that the input vector u is a row vector rather
than a column vector, its covariance matrix is therefore defined as Eu u rather
than Eu u . Our convention of a row vector u generally simplifies the notation
and avoids an overburden of conjugation symbols.
�MAI AND SAYED: FEEDBACK APPROACH TO THE STEADY-STATE PERFORMANCE OF FRACTIONALLY SPACED EQUALIZERS
83
above for different choices of the function
. Now, subtract
to get the weight error
both sides of (12) from some vector
equation
(13)
. Define the a priori and a posteriori
where
and
. We
estimation errors
now show how to rewrite (13) in terms of the error measures
alone. For this purpose, we note that
if we multiply (13) by from the left, we obtain
Fig. 2. Lossless mapping and a feedback loop.
(14)
C. Significance to MSE Evaluation
Solving for
gives
(15)
We now explain the relevance of the energy relation (20) in
the context of MSE evaluation for CM algorithms. (Applications
to other classes of adaptive algorithms, in addition to tracking
analyzes, are given in [6]–[8].) By taking expectations of both
sides of (20), we get
(16)
(21)
so that we can rewrite (13) as
Rearranging (16) leads to
(17)
If we define
(18)
then by squaring (17), we observe that the following energy relation is obtained:
(19)
Interestingly enough, this relation can be obtained by simply
replacing the terms of (17) by their respective energies; the cross
terms cancel out!. We state this result in the form of a theorem
for later reference.
Theorem 1—Energy Relation [26], [27]: Given a generic
adaptive algorithm of the form (12), it always holds that
(20)
.
where
Relation (20) holds for any adaptive algorithm of the form
(12); it relates the energies of the weight error vectors at
two successive time instants with the energies of the a priori
and a posteriori errors. No approximations are involved in
deriving (20). The relation also has an interesting physical
interpretation. It establishes that the mapping from the variables
to the variables
is
energy preserving. Combining (20) with (14), we see that both
relations establish the existence of the feedback configuration
denotes the lossless map from
shown in Fig. 2, where
to
, and where
denotes the unit delay operator. Thus, relation (20) characterizes the energy-preserving property of the feedforward path,
whereas relation (14) characterizes the feedback path.
Now, recall that our objective in this paper is to evaluate the
MSE of CM algorithms in steady state. We are not studying
conditions under which an algorithm will tend to steady state,
which is a separate and complex issue (especially for nonlinear
and time-variant filters). Instead, we want to evaluate what performance to expect from an algorithm if it reaches steady state.
The convergence to steady state (and, hence, stability) can be
studied by relying on results from averaging analysis and from
so-called ODE methods (e.g., [30]–[32]); these techniques provide tools that allow one to ascertain, under certain conditions
on the data, that there exist small enough step sizes µ for which
a filter reaches steady state (see, e.g., [13]).
Thus, assuming filter operation in steady state, we can write
for
(22)
[Similar considerations are also common in the steady-state
analysis of other classes of adaptive algorithms (see, e.g.,
[33]).]
Now, with (22), the effect of the weight error vector is canceled out from (21), and we are reduced to studying only the
equality
This equation provides a relation involving only the desired unknown
since
is itself a function of
, as evidenced
, we can
by (14). Thus, by solving the above equation as
obtain an expression for the MSE.
Theorem 2—Identity for MSE Analysis: Consider a generic
),
adaptive algorithm of the form (12). In steady state (as
when (22) holds, we obtain
(23)
�84
IEEE TRANSACTIONS ON SIGNAL PROCESSING, VOL. 48, NO. 1, JANUARY 2000
IV. STEADY-STATE ANALYSIS OF CMA2-2
We now demonstrate how the result of Theorem 2, which
holds for generic adaptive schemes of the form (12), can be applied to the CMA2-2 recursion (7). In later sections, we consider
other CM algorithms.
The derivation in the sequel relies on some statistical assumptions (four in total), the introduction of which simplifies the
analysis. Although these assumptions may not hold in general,
they are realistic for sufficiently small step sizes and, as we shall
see from several simulations, lead to good fits between our theoretical results and the simulation results.4 Following each assumption, we will provide a brief motivation and justification
for its use.
A. Two Initial Assumptions
The analysis that follows for CMA2-2 is based on the fol).
lowing two assumptions in steady-state (
and the
Assumption I.1: The transmitted signal
are independent in steady state so that
estimation error
since
is assumed zero mean.
This is a reasonable assumption since it essentially reof the equalizer to be
quires the estimation error
insensitive, in steady-state, to the actual transmitted symbols
. For example, for symbols from a 2-PAM constellation
, this means that we are requiring the behavior
, after the equalizer has
(or distribution) of the error
converged to steady state, to be insensitive to whether the
is 1 or 1.
polarity of
Assumption I.1 can be replaced by the following two conditions, which also enable us to conclude that
.
i) In steady state, CMA2-2 converges in the mean to a zero
forcing solution, i.e., the mean of the combined channelconverges to
equalizer response
col
for some
.
and
are independent as
. That is,
ii)
in steady state, the equalizer operates independently of
the transmitted signals. This is a common assumption for
steady-state analysis (see, e.g., [13]).
is inAssumption I.2: The scaled regressor energy
in steady state.
dependent of
This assumption requires the scaled energy of the input vector
and not the input vector itself to be independent of the equalizer
output. The assumption actually becomes realistic for longer
filter lengths and for sufficiently small step sizes. To see this,
is i.i.d., and note that the variassume the input sequence
will be of the order of (the equalance of the quantity
(or
izer length).5 Hence, if the step-size µ is of the order of
is of the order of
(or
less), then the variance of
less), which decreases with increasing filter length. This means
4Similar assumptions are very common in the adaptive filtering literature for
FIR structures, where they are collectively known as the independence assumptions. As mentioned in a previous footnote, although the independence assumptions do not hold in general, they still lead to realistic conclusions for sufficiently
small step sizes [24], [25], [33].
5This is obvious if the individual entries of u are i.i.d. Some calculations
will show that a similar conclusion holds, in general, when the entries of u are
taken as the outputs of an FIR channel with i.i.d. input.
that
will eventually tend to a constant and can, there. Note that by the
fore, be assumed to be independent of
is indepensame argument, we can also assume that
dent of
in steady state. (We may add that an assumption
similar to I.2 is also used in [13].)
B. The Case of Real-Valued Data
We start our analysis with the case of real-valued data
(e.g., data from a PAM constellation). In the
next section, we consider complex-valued data. It turns out that
the expressions for the MSE of CMA2-2 are distinct in both
cases, whereas those for CMA1-2 are not.
that the
For real-valued data, the zero forcing response
adaptive equalizer attempts to achieve [cf. (4)] can be of ei. In the following, we
ther form
, which
continue with the choice
yields
A similar analysis holds for the case
.
Now, the relation (23) in the CMA2-2 context leads to the
equality, for
(24)
We will write more compactly (here and throughout the paper)
for
so that (24) becomes, after expanding
This implies that the terms
and
should coincide. From
this equality, we can obtain an approximate expression for the
as we now verify. (In the argument
steady-state MSE
below, we assume that when the adaptive filter reaches steady
state, the value of is reasonably small.)
Theorem 3—MSE for Real CMA2-2: Consider the CMA2-2
. Under Asrecursion (7) with real-valued data
sumptions I.1 and I.2, it holds that for sufficiently small µ, the
steady-state MSE can be approximated by
(25)
Proof: We first evaluate
obtain
. Replacing
by
, we
�MAI AND SAYED: FEEDBACK APPROACH TO THE STEADY-STATE PERFORMANCE OF FRACTIONALLY SPACED EQUALIZERS
Using Assumption I.1 and neglecting
small leads to the approximation
We now evaluate
for small µ and
.
With Assumption I.2, we can rewrite as in (25a), shown at the
bottom of the page. Again, when µ and are small enough, we
can ignore the term and write
From the equality
, we obtain (25).
C. The Case of Complex-Valued Data
The expression for the MSE of CMA2-2 in the complex case
differs from the one we derived above for the real case, as we
shall promptly verify.
In the complex case, as in [17], we study signal constellations
that satisfy the circularity condition
(26)
, which holds
in addition to the condition
for most constellations.
Theorem 4—MSE For Complex CMA2-2: Consider the
CMA2-2 recursion (7), and assume complex-valued data
satisfying (26). Under Assumptions I.1 and
I.2, and for sufficiently small µ, the steady-state MSE can be
approximated by
(27)
Proof: Starting with (23), we now obtain
Substituting
by
, we get
85
By using (26) and Assumption I.1, the term can be simplified
. Similarly, expanding and
to
using the same approximations as in the real-valued case, we
obtain
Then, from
, we get (27). Note that (27) will not be
negative because of
and
.
Comparing the results we get for the real-valued and complex-valued cases, we see that they are similar except for a coefficient in the denominator expressions (in the real case it is
equal to 3 and in the complex case it is equal to 2). Moreover,
some useful conclusions can be drawn from these results.
1) The steady-state MSE of CMA2-2 is linearly proportional to the step-size µ and to the received signal
, which agrees with the asymptotic MSE
variance
result for the symbol-spaced (TSE) CM algorithm in [10]
and [34]. This property is also similar to that of LMS.
, we get
2) For constant modulus signals
According to (25) and (27), we then obtain
.
This is also the same as LMS in the absence of noise.
3) For nonconstant modulus signals, the MSE will not be
zero, even when there is no system noise. This is befor CMA2-2 will be
cause the instantaneous error
. The equalizer
nonzero, even when
keeps updating itself by a nonvanishing
weight vector
term and jitters around the mean solution. This property
is different from LMS, where the instantaneous error will
be equal to zero when the system is perfectly equalized.
D. Simulation Results for CMA2-2
Before proceeding to other CM algorithms, we provide some
simulation results that compare the experimental performance
with the one predicted by the previous theorems. The simulations will show than the theoretical values predicted by the expressions in Theorems 3 and 4 match reasonably well the experimental results. The channel considered in this simulation is
. A four-tap FIR filter
given by
-fractionally spaced equalizer.
is used as a
1) Constant Modulus Signals: A computer simulation was
first done for real and constant modulus signals, i.e., for bi, after 10 000 iterations,
nary data. With a step-size
CMA2-2 was observed to converge to a zero forcing solution
with MSE as low as −120 dB, i.e. MSE 10−12, which can be
considered zero. This result agrees with our analytical result that
the MSE for constant modulus signals is zero.
(25a)
�86
IEEE TRANSACTIONS ON SIGNAL PROCESSING, VOL. 48, NO. 1, JANUARY 2000
MSE
OF
TABLE I
CMA2-2 VERSUS STEP-SIZE
6-PAM SIGNALS
TABLE II
MSE OF CMA2-2 VERSUS STEP-SIZE FOR 16-QAM SIGNALS
FOR
Fig. 3. Experimental and theoretical curves for the steady-state MSE as
a function of the step-size, for CMA2-2 with input signals from a 6-PAM
constellation.
2) Real and Nonconstant Modulus Signals: In this simulation, the transmitted signal was 6-PAM constellated
with
,
,
, and
. The value of
is the norm of the received signal vector. The value of
was computed as the average over 3000 realizations of
.
The first two lines of Table I show the experimental MSE and
the theoretical MSE from Theorem 3, where the value of experimental MSE was obtained as the average over 20 repeated
experiments. Fig. 3 is a plot of the experimental MSE and the
theoretical MSE versus the step-size µ (it also contains one more
MSE curve to be discussed in Section IV-E).
3) Complex and Nonconstant Modulus Signals: With
the same channel and equalizer, we obtained the MSE for
,
,
16-QAM signals. Now,
, and
. The results are shown in
Table II and Fig. 4.
E. Comparison with Related Results in the Literature
As mentioned in the introduction, an approximate expression
for the MSE of CMA2-2 was also derived in [13]. The derivation assumed real-valued data and that
for
-fractionally spaced equalization [recall the definition of
from (1)–(3)]. It further led to the result
(28)
Fig. 4. Experimental and theoretical curves for the steady-state MSE as a
function of the step-size for CMA2-2 with input signals from a 16-QAM
constellation.
where
, but since we can write
we see that the result in (28) actually coincides with our result for real-valued data (cf. Theorem 3), except that the term
in our expression is replaced by the term
in
the above expression from [13]. In other words, the result of [13]
assumes that the average energy of all input vectors across the
equalizers,
subequalizers are identical, i.e., for
. When the input energy across the subequalizers is not
uniform, both expressions will, of course, be different.
Table I and Fig. 3 compare the experimental MSE with (28)
and our result (for the real-valued case since [13] considered
this case only). Our results seem to be more accurate in part
because the input energy across subequalizers is not uniform
in general. We may further remark that the approach in [13],
although complementary, is considerably different from the
approach of this paper. The authors of [13] employ averaging
, and
theory [32], solve a Lyapunov equation to find
. Here, we started from the generic
then calculate
equality
and solved directly for
.
In the next sections, we further extend this approach to other
kinds of CM algorithms.
In earlier work [10], an approximate expression was also obtained for the MSE of CMA2-2. However, as mentioned earlier,
the analysis in this reference assumes baud-spaced equalizers
and Gaussian regression vectors.
�MAI AND SAYED: FEEDBACK APPROACH TO THE STEADY-STATE PERFORMANCE OF FRACTIONALLY SPACED EQUALIZERS
87
TABLE III
MSE OF CMA1-2 VERSUS STEP-SIZE FOR 6-PAM SIGNALS
Fig. 5. Typical plot of transmitted signals s(1) (denoted by “o”) and equalizer
outputs y (1) (denoted by “1”) for a 16-QAM constellation.
V. STEADY-STATE ANALYSIS OF CMA1-2
We now extend the earlier results to the CMA1-2 recursion
(9). In this case, the expressions for the MSE for both real and
complex-valued data will coincide. For this reason, we shall
consider only the complex-valued case.
A. Two More Assumptions
In addition to Assumptions I.1 and I.2, we need the following
two assumptions (also in steady-state).
of the equalizer is disAssumption I.3: The output
tributed symmetrically around the transmitted signal
in steady state so that
.
(which is deFig. 5 is a plot of the steady-state output
(which is denoted
noted by “ ”) and the transmitted signal
by “o”) in one simulation for a 16-QAM data constellation. We
see that we can reasonably assume that the expected value of
is equal to the expected value of
.
is independent
Assumption I.4: The a priori error
in steady-state, and sign
so that
of sign
sign
.
This assumption is again reasonable in steady state and for
sufficiently small step sizes. This is because in this situation, we
so that the sign of
obtain relatively small estimation errors
is essentially determined by the sign of
, which,
as explained in Assumption I.2, can be taken to be independent
. [We should mention that for complex-valued data, we
of
.]
define sign
B. The Case of Complex-Valued Data
Returning to the CMA1-2 recursion (9), we see that the relaand
reduces to
tion (23) between
sign
(29)
Starting again with the basic equation (23) and using (29), we
obtain in steady-state
Fig. 6. Experimental and theoretical curves for the steady-state MSE as
a function of the step size for CMA1-2 with input signals from a 6-PAM
constellation.
TABLE IV
MSE OF CMA1-2 VERSUS STEP-SIZE FOR 16-QAM SIGNALS
Theorem 5—MSE for Complex CMA1-2: Consider the recursion (9) for complex-valued data and Assumptions I.1–I.4. It
then holds, for sufficiently small µ, that the steady-state MSE
can be approximated by
(31)
Proof: See Appendix A where, as in the CMA2-2 case, we
again invoke the fact that is small in steady state.
C. Simulation Results
We employ the same channel as in the CMA2-2 case. For realvalued signals, we used a 6-PAM data constellation. Table III
and Fig. 6 showsthe experimental and theoretical values of the
MSE for 6-PAM. Table IV and Fig. 7 show the same values for
16-QAM signals.
From the above simulations, we can see that the theoretical
results matchµ reasonably well the experimental results. The
MSE of CMA1-2 is also seen to be proportional to .
VI. NORMALIZED CM ALGORITHMS
sign
This equation can be used to establish the following result.
(30)
The normalized CM algorithm has been motivated by the desire to speed up the convergence of CMA1-2 [35], [36]. This,
however, leads to a biased estimator
for the transmitted
�88
IEEE TRANSACTIONS ON SIGNAL PROCESSING, VOL. 48, NO. 1, JANUARY 2000
for , which we shall derive further ahead.) The channel
, and we implemented
was
fractionally spaced equalizer. We can see that
a four-tap
both plots on the left lead to biased steady state solutions.
,
, on
For example, when
average.
We now propose to select differently by minimizing the
steady-state MSE relative to a zero forcing solution. We focus
here on real-valued data. Using the normalized CM recursion
(32) and relation (23), we find that
sign
so that (23), as
, reduces to
sign
Fig. 7. Experimental and theoretical curves for the steady-state MSE as
a function of the step size for CMA1-2 with input signals from a 16-QAM
constellation.
signal
when the signal constellation is not constant
modulus. In this section, we introduce a variant that leads to
less bias than earlier algorithms.
The recursion for normalized CMA has the general form
sign
(32)
is a design parameter. Compared with the CMA1-2
where
recursion (9), we see that the constant step size of CMA1-2 is
.
now replaced by a time-variant step size
, the most reasonable seFor constant modulus signals
lection for is the magnitude of the transmitted signals
. For nonconstant modulus signals, on the other hand, we
need to choose other values for . In [37], it was suggested that
we choose, for any
For
(33)
and for
(34)
For example, 4-PAM signals
, we obtain
Fig. 8 demonstrates the bias problem that arises when the
normalized CMA recursion is used with the above choices for
, viz.,
and . The two left-most plots in the figure show
the equalizer outputs with 4-PAM inputs
for
and
. (The right-most plot uses a different value
(36)
. However, our earAs before, we can proceed to evaluate
lier derivations were all based on Assumption I.1 and, because
of the bias problem, this assumption is no longer satisfied by
the normalized CM algorithm for the above values of (
and
).
Note, however, that the larger the bias the larger the value of
the steady-state MSE. This suggests selecting by minimizing
the MSE. Such a value for would result in reduced bias, in
which case, we could assume that Assumption I.1 is enforced at
least approximately (as is demonstrated by the right-most plot
of Fig. 8 for the value of we will obtain).
In this case, and using Assumptions I.1I.4, we can establish
that for sufficiently small and , the resulting steady-state MSE
would be (see Appendix B)
(37)
We can now seek that value for that minimizes (37). Setting
the derivative of (37) with respect to equal to zero leads to
, and the corresponding MSE will be
the choice
. Therefore, with
, we
obtain the variant
sign
, this leads to the choice
(35)
(38)
The simulation result in Fig. 8 shows that this selection for
leads to a considerably smaller offset and MSE.
Moreover, Table V and Fig. 9 show the values of experimental MSE and theoretical MSE for different step-sizes for
6-PAM signals using (38). We can see that the theoretical MSE
does not match closely the experimental results. The reason is
, although close, does not fully result
that our selection for
in unbiased estimation. Thus, the bias problem makes it difficult
to satisfy Assumption I.1.
Finally, as mentioned in the introduction of this section,
normalized CM algorithms are motivated by the desire
to speed up the convergence of CMA1-2. In Fig. 10, we
compare the convergence rate of both these algorithms by
. The channel is
using the above choice for ,
, and the equalizer is a
two-tap FIR filter. The input constellation is 4-PAM. We use
for both algorithms. Unlike the case of
the step-size
�MAI AND SAYED: FEEDBACK APPROACH TO THE STEADY-STATE PERFORMANCE OF FRACTIONALLY SPACED EQUALIZERS
Fig. 8.
(Ejs(i)j
Equalizer outputs y (i) of normalized CMA for three different choices of the parameter R. (left) R = (Ejs(i)j =Ejs(i)j ) = 8:2. (middle)
= 2:5. (right) R = Ejs(i)j = 2. The horizontal axis denotes iteration time while the vertical axis denotes amplitude.
89
R
=
=Ejs(i)j)
TABLE V
MSE OF NORMALIZED CMA (38) VERSUS STEP-SIZE FOR SIX-PAM SIGNALS
Fig. 10. Comparison of the convergence rates of CMA1-2 and normalized
CMA for 4-PAM signals. The figure shows two ensemble-average learning
curves obtained by averaging over several experiments.
VII. CONCLUDING REMARKS
Fig. 9. Experimental and theoretical curves for the steady-state MSE as a
function of the step size for normalized CMA (38) with input signals from a
6-PAM constellation.
constant modulus signals, the simulation shows that normalized
CMA need not converge faster than CMA1-2. The figure plots
ensemble-average curves for the a priori estimation error
in decibels, averaged over ten experiments.
energy
A similar conclusion holds for the other choices of in (33)
and (34).
In this paper, we studied the steady-state performance of
several blind adaptive algorithms of the constant modulus type,
namely, CMA2-2, CMA1-2, and normalized CMA. Analytical
expressions for the steady-state mean-square error (MSE) were
calculated and verified by computer simulations. From this
study, we conclude the following.
1) The fundamental energy-preserving relation described
in SectionIII-B is a useful property for the analysis of
the steady-state performance of gradient-based adaptive
algorithms. By using this relation, we could calculate
the MSE of CM algorithms in a simpler way than other
methods.
�90
IEEE TRANSACTIONS ON SIGNAL PROCESSING, VOL. 48, NO. 1, JANUARY 2000
2) For nonconstant modulus signals, the MSE of CMA1-2
and CMA2-2 will not converge to zero even when there
is no channel noise. Moreover, the MSE of CMA1-2 and
CMA2-2 are determined by the signal constellation size
and are proportional to the step size of the algorithms and
to the received signal energy (or variance).
3) For constant modulus signals, the MSE of CMA1-2
and CMA2-2 will converge to zero when there is no
channel noise. The step size should be sufficiently small
to guarantee stable operation of the equalizer for both
algorithms. For CMA1-2, because of the existence of
undesired local minima, special care is needed with the
initial condition.
4) Normalized CMA is a faster algorithm than CMA1-2 for
constant-modulus signals. For nonconstant modulus signals, however, normalized CMA will converge to a biased
solution. We showed in SectionVI how to decrease the
bias by designing a new normalized CM algorithm.
5) Our analysis suggests that CMA2-2 has the best performance among the algorithms we discussed in this paper.
When implemented in a fractionally spaced form, it has
no undesired minima, it converges faster than CMA1-2, it
gives an unbiased solution for both constant and nonconstant modulus signals, and it requires only simple calculations.
APPENDIX A
PROOF OF THEOREM 5
Expanding the right-hand side of (30) leads to /belowdisplayskip16pt
sign
APPENDIX B
DERIVATION OF (37)
From (35) and (36), we get /belowdisplayskip8pt
sign
sign
sign
We consider the case where
Similar
results
can
be
obtained
. Then,
by replacing with
first examine the term
is independent of
Assumption I.2 (where
the term
can be written as
.
when
. Let us
. With
and ),
sign
With Assumptions I.3 and I.4, we get
sign
sign
In addition, from Assumption I.1, and
, we get
. Hence, the term
can
because
be simplified to
Now, we evaluate the term
be written as
. From Assumption I.2,
can
sign
Expanding this expression, we get
sign
sign
sign
Hence,
. Replacing
tions I.1 and I.4, we get
becomes
the term
sign
by
and using Assump. Using Assumption I.2,
Now, from Assumptions I.1 and I.3, we get
. Then,
. Ignoring the term
are sufficiently small, we get
when and
and
For small enough
sign
, we can write sign
, and
sign
so that
µAgain, when and
are sufficiently small, the term
can be ignored, and hence
µ,
Then,
leads to (37). This expression for the MSE is
non-negative for any because
Using
, we are led to (31). Note that the expression for the
MSE cannot be negative because
.
Equality occurs only for constant modulus signals.
�MAI AND SAYED: FEEDBACK APPROACH TO THE STEADY-STATE PERFORMANCE OF FRACTIONALLY SPACED EQUALIZERS
REFERENCES
[1] R. Liu and L. Tong, Eds., “Special issue on blind identification and
equalization,” Proc. IEEE, vol. 86, Oct. 1998.
[2] J. R. Treichler and I. Fijalkow, “Fractionally spaced equalizers: How
long should they be?,” IEEE Signal Processing Mag., vol. 13, pp. 65–81,
May 1996.
[3] C. R. Johnson et al., “Blind equalization using the constant modulus
criterion: A review,” Proc. IEEE, vol. 86, pp. 1927–1950, Oct. 1998.
[4] A. V. Keerthi, A. Mathur, and J. Shynk, “Misadjustment and tracking
analysis of the constant modulus array,” IEEE Trans. Signal Processing,
vol. 46, pp. 51–58, Jan. 1998.
[5] O. W. Kwon, C. K. Un, and J. C. Lee, “Performance of constant modulus
adaptive digital filters for interference cancellation,” Signal Process.,
vol. 26, no. 2, pp. 185–196, Feb. 1992.
[6] N. R. Yousef and A. H. Sayed, “A unified approach to the steady-state
and tracking analyzes of adaptive filtering algorithms,” in Proc. 4th
IEEE-EURASIP Int.Workshop Nonlinear Signal Image Process. (NSIP),
vol. 2, Antalya, Turkey, June 1999, pp. 699–703.
, “A feedback analysis of the tracking performance of blind adap[7]
tive equalization algorithms,” in Proc. Conf. Decision Contr., Phoenix,
AZ, Dec. 1999.
, “Tracking analysis of the LMF and LMMN adaptive algorithms,”
[8]
in Proc. Asilomar Conf. Signals, Syst., Comput., Pacific Grove, CA, Oct.
1999.
[9] C. K. Chan and J. J. Shynk, “Stationary points of the constant modulus
algorithm for real Gaussian signals,” IEEE Trans. Acoust. Speech, Signal
Processing, vol. 38, pp. 2176–2181, Dec. 1990.
[10] J. J. Shynk, R. P. Gooch, G. Krisnamurthy, and C. K. Chan, “A comparative performance study of several blind equalization algorithms,” in
Proc. SPIE Conf. Adv. Signal Process., vol. 1565, 1991, pp. 102–117.
[11] N. J. Bershad and S. Roy, “Performance of the 2-2 constant modulus
(CM) adaptive algorithm for Rayleigh fading sinusoids in Gaussian
noise,” in Proc. ICASSP, Albuquerque, NM, Apr. 1990, pp. 1675–1678.
[12] H. H. Zeng and L. Tong, “The MSE performance of constant modulus receivers,” in Proc. ICASSP, Munich, Germany, Apr. 1997, pp.
3577–3580.
[13] I. Fijakow, C. E. Manlove, and C. R. Johnson, “Adaptive fractionally
spaced blind CMA equalization: Excess MSE,” IEEE Trans. Signal Processing, vol. 46, pp. 227–231, Jan. 1998.
[14] G. Ungerboeck, “Fractional tap-spacing equalizer and consequences
for clock recovery in data modems,” IEEE Trans. Commun., vol.
–COMM24, pp. 856–864, Aug. 1976.
[15] I. Fijalkow and F. L. de Victoria, “Adaptive fractionally spaced blind
equalization,” in Proc. IEEE Signal Process. Workshop, Yosemite, CA,
Oct. 1994, pp. 257–260.
[16] Y. Li and Z. Ding, “Global convergence of fractionally spaced Godard
(CMA) adaptive equalizers,” IEEE Trans. Signal Processing, vol. 44,
pp. 818–826, Apr. 1996.
[17] D. N. Godard, “Self-recovering equalization and carrier tracking in twodimensional data communication systems,” IEEE Trans. Commun., vol.
28, no. 11, pp. 1867–1875, Nov. 1980.
[18] J. R. Treichler and B. G. Agee, “A new approach to multipath correction of constant modulus signals,” IEEE Trans. Acoust., Speech, Signal
Processing, vol. –ASSP31, pp. 349–472, Apr. 1983.
[19] Z. Ding, C. R. Johnson, and R. A. Kennedy, “On the (non)existence of
undesirable equilibria of Godard blind equalizers,” IEEE Trans. Signal
Processing, vol. 40, pp. 2425–2432, Oct. 1992.
[20] S. Haykin, Adaptive Filter Theory, 3rd ed. Englewood Cliffs, NJ: Prentice-Hall, 1996.
[21] B. Widrow and S. D. Stearns, Adaptive Signal Processing. Englewood
Cliffs, NJ: Prentice-Hall, 1985.
[22] O. Macchi, Adaptive Processing: The LMS Approach with Applications
in Transmission. New York: Wiley, 1995.
[23] O. Macchi and E. Eweda, “Second-order convergence analysis of
stochastic adaptive linear filtering,” IEEE Trans. Automat. Contr., vol.
AC-28, pp. 76–85, Jan. 1983.
[24] J. K. Kim and L. D. Davisson, “Adaptive linear estimation for stationary
-dependent processes,” IEEE Trans. Inform. Theory, vol. IT-21, pp.
23–31, Jan. 1975.
[25] J. E. Mazo, “On the independence theory of equalizer convergence,” Bell
Syst. Tech. J., vol. 58, pp. 963–993, May/June 1979.
[26] A. H. Sayed and M. Rupp, “A time domain feedback analysis of adaptive gradient algorithms via the small gain theorem,” in Proc. SPIE, vol.
2563, San Diego, CA, July 1995, pp. 458–469.
M
91
[27] M. Rupp and A. H. Sayed, “A time-domain feedback analysis of filterederror adaptive gradient algorithms,” IEEE Trans. Signal Processing, vol.
44, pp. 1428–1439, June 1996.
[28] A. H. Sayed and M. Rupp, “An -stable feedback structure for nonlinear adaptive filtering and identification,” Automatica, vol. 33, no. 1,
pp. 13–30, Jan. 1997.
, “Robustness issues in adaptive filtering,” in DSP Hand[29]
book. Boca Raton, FL: CRC, 1998, ch. 20.
[30] V. Solo and X. Kong, Adaptive Signal Processing
Algorithms. Englewood Cliffs, NJ: Prentice-Hall, 1995.
[31] H. J. Kushner, Approximation and Weak Convergence Methods
for Random Processes with Applications to Stochastic System
Theory. Cambridge, MA: MIT Press, 1984.
[32] A. Benveniste, M. Metivier, and P. Priouret, Adaptive Algorithms and
Stochastic Approximations. New York: Springer-Verlag, 1990.
[33] E. Eweda, “Comparison of RLS, LMS, and sign algorithms for tracking
randomly time-varying channels,” IEEE Trans. Signal Processing, vol.
42, pp. 2937–2944, Nov. 1994.
[34] S. U. H. Quershi, “Adaptive equalization,” Proc. IEEE, vol. 73, pp.
1349–1387, 1985.
[35] K. Hilal and P. Duhamel, “A convergence study of the constant modulus algorithm leading to a normalized-CMA and a block-normalizedCMA,” in Proc. EUSIPCO, Brussels, Belgium, Aug. 1992, pp. 135–138.
[36] C. B. Papadias and D. T. M. Slock, “On the convergence of normalized
constant modulus algorithms for blind equalization,” in Proc. Int. Conf.
Digital Signal Processing, Nicosia, Cyprus, July 1993, pp. 245–250.
, “Normalized sliding window constant modulus and decision-di[37]
rected algorithms: A link between blind equalization and classical adaptive filtering,” IEEE Trans. Signal Processing, vol. 45, pp. 231–235, Jan.
1997.
l
Junyu Mai received the B.S. degree in biotechnology from Tsinghua University, Tsinghua,
Taiwan, R.O.C., in 1995 and the M.S. degrees in
biochemistry and in electrical engineering from the
University of California, Los Angeles (UCLA), in
1996 and 1998, respectively.
She is currently a Senior Research Scientist with
the Advanced Research Department, St. Jude Medical Cardiac Rhythm Management Division, Sylmar,
CA, where she is working on techniques for congestive heart failure monitoring, heart sound detection
and analysis, and body position detection. Her research interests are in adaptive
algorithms and biomedical applications.
–Ms. Mai was the recipient of the 19981999 Outstanding M.S. Student Award
from the Electrical Engineering Department at UCLA.
Ali H. Sayed (SM’99) received the Ph.D. degree in
electrical engineering in 1992 from Stanford University, Stanford, CA.
He is Associate Professor of electrical engineering
at the University of California, Los Angeles. He has
more than 120 journal and conference publications,
is a coauthor of Indefinite Quadratic Estimation and
Control (Philadelphia, PA: SIAM, 1999) and Linear
Estimation (Englewood Cliffs, NJ: Prentice-Hall, in
press), and a coeditor of Fast Reliable Algorithms for
Matrices with Structure (Philadelphia, PA: SIAM,
1999). He has contributed several articles to engineering and mathematical
encyclopedias and handbooks. His research interests span several areas
including adaptive and statistical signal processing, linear and nonlinear
filtering and estimation, linear and nonlinear system and control theories,
interplays between signal processing and control methodologies, and reliable
and efficient algorithms for large-scale structured computations.
Dr. Sayed is a member of the editorial board of the SIAM Journal on Matrix
Analysis and Its Applications, has served as coeditor of special issues of the
journal Linear Algebra and Its Applications, and is past Associate Editor of the
IEEE TRANSACTIONS ON SIGNAL PROCESSING. He has served on the program
committees of several international meetings. He is also a recipient of the 1996
IEEE Donald G. Fink Award.
�