Hand Segmentation for Gesture Recognition
in EGO-Vision
Giuseppe Serra
Marco Camurri
Lorenzo Baraldi
giuseppe.serra@unimore.it marco.camurri@yahoo.it baraldi.lorenzo@gmail.com
Michela Benedetti
Rita Cucchiara
michela.benedetti89@gmail.com rita.cucchiara@unimore.it
Dipartimento di Ingegneria “Enzo Ferrari”
Università degli Studi di Modena e Reggio Emilia
Via Vignolese 905, 41125 Modena - Italy
ABSTRACT
Portable devices for first-person camera views will play a
central role in future interactive systems. One necessary
step for feasible human-computer guided activities is gesture recognition, preceded by a reliable hand segmentation
from egocentric vision. In this work we provide a novel
hand segmentation algorithm based on Random Forest superpixel classification that integrates light, time and space
consistency. We also propose a gesture recognition method
based Exemplar SVMs since it requires a only small set of
positive sampels, hence it is well suitable for the egocentric
video applications. Furthermore, this method is enhanced
by using segmented images instead of full frames during test
phase. Experimental results show that our hand segmentation algorithm outperforms the state-of-the-art approaches
and improves the gesture recognition accuracy on both the
publicly available EDSH dataset and our dataset designed
for cultural heritage applications.
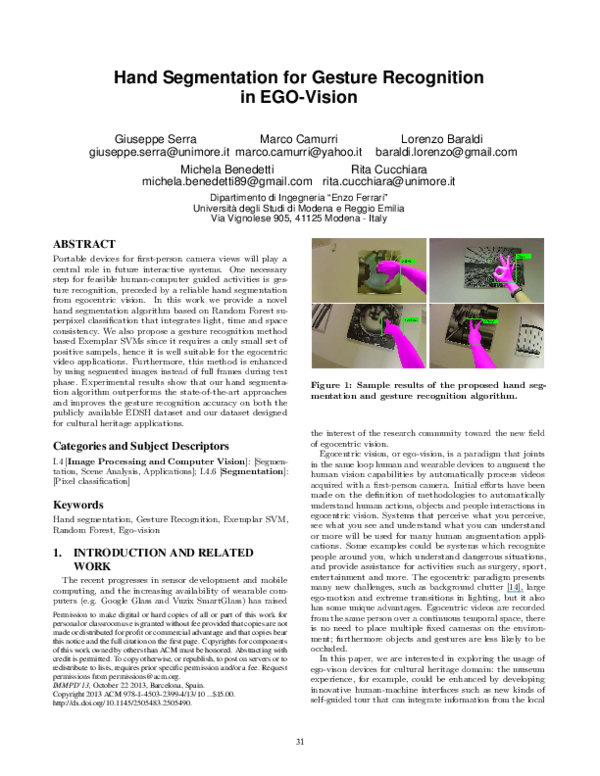
Figure 1: Sample results of the proposed hand segmentation and gesture recognition algorithm.
the interest of the research community toward the new field
of egocentric vision.
Egocentric vision, or ego-vision, is a paradigm that joints
in the same loop human and wearable devices to augment the
human vision capabilities by automatically process videos
acquired with a first-person camera. Initial efforts have been
made on the definition of methodologies to automatically
understand human actions, objects and people interactions in
egocentric vision. Systems that perceive what you perceive,
see what you see and understand what you can understand
or more will be used for many human augmentation applications. Some examples could be systems which recognize
people around you, which understand dangerous situations,
and provide assistance for activities such as surgery, sport,
entertainment and more. The egocentric paradigm presents
many new challenges, such as background clutter [14], large
ego-motion and extreme transitions in lighting, but it also
has some unique advantages. Egocentric videos are recorded
from the same person over a continuous temporal space, there
is no need to place multiple fixed cameras on the environment; furthermore objects and gestures are less likely to be
occluded.
In this paper, we are interested in exploring the usage of
ego-vison devices for cultural heritage domain: the museum
experience, for example, could be enhanced by developing
innovative human-machine interfaces such as new kinds of
self-guided tour that can integrate information from the local
Categories and Subject Descriptors
I.4 [Image Processing and Computer Vision]: [Segmentation, Scene Analysis, Applications]; I.4.6 [Segmentation]:
[Pixel classification]
Keywords
Hand segmentation, Gesture Recognition, Exemplar SVM,
Random Forest, Ego-vision
1. INTRODUCTION AND RELATED
WORK
The recent progresses in sensor development and mobile
computing, and the increasing availability of wearable computers (e.g. Google Glass and Vuzix SmartGlass) has raised
Permission to make digital or hard copies of all or part of this work for
personal or classroom use is granted without fee provided that copies are not
made or distributed for profit or commercial advantage and that copies bear
this notice and the full citation on the first page. Copyrights for components
of this work owned by others than ACM must be honored. Abstracting with
credit is permitted. To copy otherwise, or republish, to post on servers or to
redistribute to lists, requires prior specific permission and/or a fee. Request
permissions from permissions@acm.org.
IMMPD’13, October 22 2013, Barcelona, Spain.
Copyright 2013 ACM 978-1-4503-2399-4/13/10 ...$15.00.
http://dx.doi.org/10.1145/2505483.2505490.
31
�environment, Web and social medias. Furthermore these
interfaces can help users to generate and share content in real
time. In this scenario, hand detection and gesture recognition
play a fundamental role, since this kind of applications should
substitute other physical controller devices. Since gestures
are strictly related to a specific scenario or application, it
necessary to build a set of new classifiers using information
gathered during a fast setup phase involving the user.
This problem, in ego-vision scenario, has been addressed
only recently by the research community. Khan and Stoettinger in [8] studied color classification for skin segmentation
and pointed out how color-based skin detection has many
advantages, like potentially high processing speed, invariance
against rotation, partial occlusion and pose change. The
authors tested Bayesian Networks, Multilayers Perceptrons,
AdaBoost, Naive Bayes, RBF Networks and Random Forest.
They demonstrated that Random Forest classification obtains
the highest F-score among all the other techniques. Fathi
et al. [4] proposed a different approach to hand detection,
exploiting the basic assumption that background is static in
the world coordinate frame. Thus foreground objects are detected as to be the moving region respect to the background.
An initial panorama of the background is required to discriminate between background and foreground regions: this
is achieved by fitting a fundamental matrix to dense optical
flow vectors. This approach is shown to be a robust tool
for skin detection for hand segmentation in a limited indoor
environment but it performs poorly with more unconstrained
scenes. Li and Kitani [9] provide an historical overview about
approaches for detecting hands from moving cameras. They
define three categories: local appearance-based detection,
global appearance-based detection, where a global template
of hand is needed, and motion-based detection, which is
based on the hypothesis that hands and background have
different motion statistics. Motion-based detection approach
requires no supervision nor training. On the other hand, this
approach eventually identifies as hand an object manipulated
by the user, since it moves together his hands. In addition
they proposed a model with sparse feature selection which
was shown to be an illumination-dependent strategy. To
solve this issue, they trained a set of random forests indexed
by a global color histogram, each one reflecting a different
illumination condition. Recently Bagdanov et al. [2] propose
a method to predict the status of the user hand by jointly
exploiting depth and RGB imagery.
All the presented previous works present good characteristics, but lack of generality, since they take into account
only few aspects to model user hand appearance and they
are not integrated with a gesture recognition system. In this
paper we present a novel method for hand segmentation and
gesture recognition that can be used as basis for ego-vision
applications. Hand detection is based on Random Forest
classifiers learned by color and gradient features which are
computed on superpixels. In order to improve the detection
accuracy we present two strategies that incorporate temporal
and spatial coherence: temporal smoothing and spatial consistency. Hand detection masks is then used as input for the
gesture recognition step in order to reduce misclassification.
We propose to use Exemplar SVMs to recognize gestures
since it requires a only small set of positive samples, hence
it well suitable for the ego-vision application domain. Experimental results show that our hand segmentation algorithm
outperforms the state-of-the-art approaches on publicly avail-
able EDSH dataset [9] and demonstrate that segmentation
step improves the gesture recognition accuracy. Fig. 1 shows
sample results of the proposed hand segmentation and gesture recognition algorithm.
Here, we mainly provide our contributions:
• we define a novel hand segmentation algorithm that
differently from [9], uses a superpixel features, and integrate not only illumination invariance but also temporal
and spatial consistency improves the state-of-the-art
results in the publicly available EDSH dataset.
• we develop of a gesture recognition algorithm based
on Exemplar SVM technique that, even with a few
positive samples, permits to reach competitive results.
2. METHOD OVERVIEW
2.1
Hand segmentation
Ego-vision applications require a fast and reliable segmentation of the hands; thus we propose to use random forest
classifiers, as they are known to efficiently work even with
large inputs [3]. Since using a per-pixel basis in label assignment has show to be inefficient [7], we adopt segmentation
method which assign labels to superpixels, as suggested in
[16]. This allows a complexity reduction of the problem and
also gives better spatial support for aggregating features that
could belong to the same object.
To extract superpixels for every frames we use the Simple
Linear Iterative Clustering (SLIC) algorithm, proposed in
[1] as memory efficient and highly accurate segmentation
method. The SLIC super-pixel segmentation algorithm is
a k-means-based local clustering of pixels in a 5D space,
where Lab color values and pixel coordinates are used. A
parallel implementation of the SLIC super-pixel algorithm is
available in [13].
We represent superpixels by features to encode color and
gradient information. As pointed out by previous works,
HSV and LAB color spaces have been proven to be robust
for skin detection. In particular, we describe each superpixel
with mean and covariance matrix of its pixel values, and a
32-bin color histogram both in HSV and Lab color spaces. To
discriminate between objects with a similar color distribution
of skin we include following gradient information: Gabor
feature obtained with 27 filters (nine orientations and three
different scales: 7×7, 13×13, 19×19) and a simple histogram
of gradients with nine bins.
2.1.1 Illumination invariance, Temporal and Spatial
Consistency
In order to deal with different illumination conditions we
train a collection of random forest classifiers indexed by
a global HSV histogram with 32 bins, as described in [9].
Hence, training images are distributed among the classifiers
by a k-means clustering on the feature space. By using a
histogram over all three channels of the HSV color space,
each scene cluster encodes both the appearance of the scene
and its illumination. Intuitively, it models the fact that
hands viewed under similar global appearance will share a
similar distribution in the feature space. Given a feature
vector l of a superpixel s and a global appearance feature g,
the posterior distribution of s is computed by marginalizing
over different scenes c:
32
�Figure 2: Comparison before (left image) and after
(right image) Temporal smoothing.
P (s|l, g) =
X
P (s|l, c)P (c|g),
Figure 3: Comparison before (left image) and after
(right image) Spatial Consistency.
belong to a hand part; similarly, #(xit = 1, xit−k = 0) is the
number of times that a pixel in frame t belongs to a hand
part and pixel in the same position in frame t − k does not
belong to a hand region. Figure 2 shows an example where
temporal smoothing deletes blinking regions (i.e. the tea box
brand and jar shadows on the right).
(1)
c
where P (s|l, c) is the output of a global appearance-specific
classifier and P (c|g) is a conditional distribution of a scene
c given a global appearance feature g. In test phase, the
conditional P (c|g) is approximated using an uniform distribution over the five nearest models learned at training.
It is important to underline that the optimal number of
classifiers depends on the characteristics of the dataset: a
training dataset with several different illumination conditions,
taken both inside and outside, will need an higher number
of classifiers than one taken indoor.
In addition to [9], we model the hand appearance not
only considering illumination variations, but also including
semantic coherence in time and space.
2.1.3 Spatial Consistency
Given pixels elaborated by the previous steps, we want to
exploit spatial consistency to prune away small and isolated
pixel groups that are unlikely to be part of hand regions and
also aggregate bigger connected pixel groups.
For every pixel x, we extract its posterior probability P (xit )
and use it as input for the GrabCut algorithm [15]. Each
pixel with P (xit ) ≥ 0.5 is marked as foreground, otherwise
it’s considered as part of background. After the segmentation
step, we discard all the small isolated regions that have an
area of less than 5% of the frame and we keep only the three
largest connected components.
In Figure 3 an example with and without applying the
Spatial Consistency method is depicted; notice this technique
allows to better aggregate superpixels that are near the
principal blob region.
2.1.2 Temporal smoothing
We exploit temporal coherence to improve the foreground
prediction of a pixel in a frame by a weighted combination
of its previous frames, since past frames should affect the
results prediction for the current frame.
The smoothing filter for a pixel xit of a frame t (inspired
by [10]) can thus be defined as follows:
P (xit = 1) =
d
X
2.2
wk P (xit = 1|xit−k = 1) ·
k=0
· P (xit−k = 1|lt−k , gt−k ) + P (xit = 1|xit−k = 0) ·
�
· P (xit−k = 0|lt−k , gt−k )
(2)
P (xit−k
where
= 1|lt−k , gt−k ) is the posterior probability
that a pixel in frame t − k is marked as hand part and d
is a number of past frames used. This likelihood can be
defined as the probability P (s|lt−k , gt−k ), being xit part of
s. In the same way, P (xit−k = 0|lt−k , gt−k ) is defined as the
probability 1 − P (s|l, gt−k ).
While P (xit = 1|xit−k = 1) and P (xit = 1|xit−k = 0) are
prior probabilities estimated from the training set as follows:
P (xit = 1|xit−k = 1) =
#(xit = 1, xit−k = 1)
#(xit−k = 1)
P (xit = 1|xit−k = 0) =
#(xit = 1, xit−k = 0)
#(xit−k = 0)
Hand status recognition
Given a subregion of the image space whose pixel are likely
to be a segmented hand, we want now to recognize the hand
configuration, picking from a finite set of possible gestures.
Thus, we use the Exemplar SVM (ESVM) approach proposed
by Malisiewicz et al. [11]. This method involves two steps:
first, for each class an independent training of a finite and
small set of positive examples (the “exemplars”) versus a huge
set of negative examples is performed. After the training
stage each independent SVM classifier is tuned to detect its
specific positive exemplar, thus a further step to aggregate
classifiers of each class is necessary. In the second stage,
since the outputs of each classifier are not comparable, a
calibration by fitting a probability distribution to a heldout set of negative and positive samples is performed, as
described in [12]. The calibration can be interpreted as a
simple rescaling and shifting of the decision boundary, and
does not affect the ordering of the score, allowing to compare
the outputs of multiple independently-trained ExemplarSVMs. Thus, multiple Exemplar-SVMs can be combined to
provide a model for each class.
Since Ego Vision applications are highly interactive, their
setup step must be fast (i.e. few positive examples can be
acquired) but they allow an a priori massive collection of negative examples (e.g. for a museum application, a large footage
without hands can be early acquired to train the classifier).
Thus, ESVMs is well suitable for our application and was
preferred to Latent SVM (LSVM) proposed by Felzenszwalb
et al. [5] that have shown good performance in image classi-
where #(xit−k = 1) and #(xit−k = 0) are the number
of times in which xt−k belongs or not to a hand region,
respectively; #(xit = 1, xit−k = 1) is the number of times
that two pixels at the same location at frame t and t − k
33
�Features
HSV
+ LAB
+ LAB hist.
+ HSV hist.
+ Grad hist.
+ Gabor
EDSH 2
0.752
0.754
0.755
0.755
0.758
0.761
EDSH kitchen
0.801
0.808
0.823
0.823
0.828
0.829
Features
II
II + TS
II + TS + SC
EDSH 2
0.789
0.791
0.852
EDSH kitchen
0.831
0.834
0.901
Table 2: Performance comparison considering Illumination Invariance (II), Time Smoothing (TS) and
Spatial Consistency (SC).
Table 1: Performance by incrementally adding new
features.
Hayman et al. [6]
Jones et al. [7]
Li et al. [9]
Our method
fication competitions. Although LSVM could well model the
hand deformability property, it’s more complex, it requires a
more balanced set of negative and positive examples during
the training stage and exhibits similar performance w.r.t.
ESVM method [11].
EDSH 2
0.211
0.708
0.835
0.852
EDSH kitchen
0.213
0.787
0.840
0.901
Table 3: Hand segmentation comparison with the
state-of-the-art.
3. EXPERIMENTAL RESULTS
superpixel with mean and covariance matrix of its pixel values in HSV color space, then we do the same using LAB
color space and we add color histograms. Lastly, we include
a histogram of gradients and Gabor feature. In order to
analyze how visual features impact on the performance, in
this experiment we do not include the temporal and spatial
context information by using a single random forest classifier.
Note that although color information plays a fundamental
role for hand detection, some ambiguities between hands
and other similar colored object still remain; these can be
reduced by adding features based on gradient histograms. In
fact, the usage of the full descriptor slightly improves the
performance.
To evaluate the performance of proposed method we tested
it on two datasets: EDSH and EGO-HSGR. The recent publicly available EDSH dataset [9] consists in egocentric videos
acquired to analyze performance of several hand detection
methods. It consists in three videos (EDSH 1, used as train
video, and EDSH 2 and EDSH kitchen used as test videos)
that contain indoor and outdoor scenes with large variations
of illumination, mild camera motion induced by walking and
climbing stairs. All videos are recorded at a resolution of
720p and a speed of 30FPS. The dataset includes segmentation masks of hands, but it is not comprehensive of gesture
annotations.
In order to analyze the performance of our method to recognize gestures, we generated a new dataset which contains
12 videos of indoor scenes (EGO-HSGR); it includes segmentation masks and gesture annotations. Videos have been
recorded with a Panasonic HX-A10 Wearable Camcorder
at a resolution of 800 × 450 with a 25FPS in two different
locations: a library and department’s exhibition area.
The aim of this dataset is to reproduce an environment
similar to a museum for human and object interaction: paintings and posters are hung on the walls, true masterpieces
or either its virtual images; the visitor walks and sometimes
stops in front of an object of interest performing some gestures to interact with next generation wearable devices. We
identify five different gestures that are used commonly: point
out, like, dislike, ok and victory. These can be associated to
different action or used for record social experience. Fig. 4
shows some frame examples.
To evaluate performance of our pixel-level hand detector
a subset of six videos are used (three for training and two
for testing). Segmentation masks are provided every 25
frames for a total of 700 annotations. For gesture analysis we
extract all the keyframes and we manually annotated them
distinguishing between gestures. The F-score (harmonic
mean of the precision and recall rate) is used to quantity
hand detection performance, while gesture recognition is
evaluated in terms of mAP (mean Average Precision).
3.1
3.2
Temporal Smoothing and Spatial Consistency
In this experiment we validate the proposed techniques
that take into account illumination variations, time dependence and spatial consistency. Table 2 shows the F-measure
scores obtained on EDSH dataset incrementally adding Illumination Invariance (II), Time Smoothing (TS) and Spatial
Consistency (SC). Note that there is a significant improvement in performance when all these three techniques are
applied together. In particular, illumination invariance substantially increases the performance with respect to results
obtained using only visual features and a single random forest classifier, while the improvement introduced by temporal
smoothing is less pronounced. The main contribution is given
by Spatial Consistency, that prunes away small and isolated
pixel groups and merge spatially nearby regions, increasing
the F-measure score of about six percentage points. The
proposed technique is also tested in our EGO-HSGR dataset
obtaining an F-measure score of 0.908 and 0.865 for the
EGO-HSGR 4 and EGO-HSGR 5 videos.
3.3
Comparison to related methods
In Table 3 we compare our results to several approaches
on EDSH dataset: a single-pixel color approach inspired
by [7], a video stabilization approach based on background
modeling using affine alignment of image frames inspired by
[6] and an approach based on random forest, proposed by
[9]. The single-pixel approach is a random regressor trained
only using single-pixel LAB color values. The background
modeling approach aligns sequences of 15 frames estimating
Features performance
First, we examine the effectiveness of our features to discriminate between hand and non-hand superpixels. Table 1
shows performance in terms of F-measure on EDSH dataset
with different feature combinations: firstly we describe each
34
�(a)
(b)
(c)
(d)
(e)
Figure 4: Our dataset consists of five gestures: a) point out; b) like; c) dislike; d) ok; e) victory.
the gesture recognition without hand segmentation. In Table
4 we present the Average Precision per gesture obtained
with five trained Exemplar SVM. Notice that using our hand
detection technique provides a gain in performance for all gestures, except Like. This is due to fact Like gesture is more
sensitive to erroneous hand segmentation that negatively
effects the recognition step.
0.9
0.8
0.693
0.7
0.592
mAP
0,6
0.5
0.603
0.413
0.509
0.4
0.3
0.329
0.2
HD + GR
0.1
GR
4. CONCLUSION
The work in this paper gives some initial but very promising results for the feasibility in adopting ego-vision to recognize human actions by first-person camera view. The
proposed approach shows interesting results in term of accuracy for hand segmentation and gesture recognition which
are novel in the panorama of multimedia-oriented computer
vision dealing with the new paradigm of ego-vision.
Although the problem could become very challenging for a
computer vision approach (e.g. cameras are not fixed and are
freely moving, quality of images are poor and noisy due to
the wearable camera), it can open new interesting scenarios
for multimedia applications. For example user actions can
be self-interpreted and integrated, since sensors are directly
attached to the user.
0
1
2
No. Exemplar SVMs
5
Figure 5: Mean Average Precision for different number of trained Exemplar SVMs.
Gestures
Dislike
Point out
Like
Ok
Victory
GR
0.626
0.382
0.817
0.698
0.490
HD + GR
0.761
0.458
0.754
0.951
0.541
Table 4: Average precision with five trained Exemplar SVMs per Gesture.
5. REFERENCES
[1] R. Achanta, A. Shaji, K. Smith, A. Lucchi, P. Fua, and
S. Süsstrunk. Slic superpixels compared to
state-of-the-art superpixel methods. Pattern Analysis
and Machine Intelligence, IEEE Transactions on,
34(11):2274–2282, 2012.
[2] A. D. Bagdanov, A. Del Bimbo, L. Seidenari, and
L. Usai. Real-time hand status recognition from rgb-d
imagery. In Proc. of International Conference on
Pattern Recognition (ICPR), 2012.
[3] L. Breiman. Random forests. Machine Learning,
45(1):5–32, 2001.
[4] A. Fathi, X. Ren, and J. Rehg. Learning to recognize
objects in egocentric activities. In Proc. of CVPR, 2011.
[5] P. F. Felzenszwalb, R. B. Girshick, D. McAllester, and
D. Ramanan. Object detection with discriminatively
trained part based models. IEEE Transactions on
Pattern Analysis and Machine Intelligence,
32(9):1627–1645, 2010.
[6] E. Hayman and J. Eklundh. Statistical background
subtraction for a mobile observer. In Proc. of ICCV,
2003.
[7] M. Jones and J. Rehg. Statistical color models with
application to skin detection. In Proc. of CVPR, 1999.
[8] R. Khan, A. Hanbury, and J. Stoettinger. Skin
detection: A random forest approach. In Proc. of ICIP,
2010.
their mutual affine transformations; pixels with high variance
are considered to be foreground hand regions. As can be seen,
although the single-pixel approach is conceptually simple,
is still quite effective. In addition, we observe that the low
performance of the video stabilization approach is due to
large ego-motion because the camera is worn by the user.
The method recently proposed by [9] is more similar to our
approach, but the use of superpixels, the selection of a new
set of local features and the introduction of temporal and
spatial consistency allow us to outperforms that results.
3.4
Hand Recognition
In order to evaluate the use of Exemplar SVM for gesture
recognition we test our approach using a different number of
trained classifiers on EGO-HSGR dataset. Since Ego-vision
scenario requires a fast initial setup for the user, we analyze
our approach with a very few positive samples. Figure 5
shows the mean Average Precision in two different settings:
we apply our gesture recognition algorithm based on Exemplar SVM on the dataset frames directly (GR); we use the
Exemplar SVM on the same frames processed by our hand
segmentation algorithm (HD + GR). As expected, the mean
Average Precision increases proportionally with the number
of trained Exemplars in both settings. The performance
obtained using our hand segmentation approach outperforms
35
�[13] C. Y. Ren and I. Reid. gslic: a real-time
implementation of slic superpixel segmentation.
Technical report, University of Oxford, Department of
Engineering Science, 2011.
[14] X. Ren and C. Gu. Figure-ground segmentation
improves handled object recognition in egocentric video.
In Proc. of CVPR, 2010.
[15] C. Rother, V. Kolmogorov, and A. Blake. ”grabcut”:
interactive foreground extraction using iterated graph
cuts. ACM Trans. Graph., 23(3):309–314, 2004.
[16] J. Tighe and S. Lazebnik. Superparsing - scalable
nonparametric image parsing with superpixels.
International Journal of Computer Vision, pages
329–349, 2013.
[9] C. Li and K. M. Kitani. Pixel-level hand detection in
ego-centric videos. In Proc. of CVPR, 2013.
[10] K.-H. Liu, M.-F. Weng, C.-Y. Tseng, Y.-Y. Chuang,
and M.-S. Chen. Association and temporal rule mining
for post-filtering of semantic concept detection in video.
IEEE Transactions on Multimedia, 10(2):240–251, 2008.
[11] T. Malisiewicz, A. Gupta, and A. A. Efros. Ensemble of
exemplar-svms for object detection and beyond. In
ICCV, 2011.
[12] J. C. Platt. Probabilistic outputs for support vector
machines and comparisons to regularized likelihood
methods. In Advances in Large Margin Classifiers,
pages 61–74. MIT Press, 1999.
36
�
 Marco Camurri
Marco Camurri