Academia.edu no longer supports Internet Explorer.
To browse Academia.edu and the wider internet faster and more securely, please take a few seconds to upgrade your browser.
Claytronics
 Rajat Sharma
Rajat Sharmavisibility
…
description
6 pages
link
1 file
Sign up for access to the world's latest research
checkGet notified about relevant papers
checkSave papers to use in your research
checkJoin the discussion with peers
checkTrack your impact
Abstract
The present paper deals with the concept of new emerging technology called Claytronics. This paper explores the published articles that report on results from research conducted by the Intel and Carnegie Mellon University. Claytronics is a form a programmable matter that takes the concept of modular robots to a new extreme. The research is the brainchild of Seth Goldstein, an Associate Professor in the Computer Science Department at Carnegie Mellon University and Todd Mowry, Director of Intel Research Pittsburgh. They determined that, by taking advantage of advances in Nano-scale assembly, they might create human replicas from ensembles of tiny computing devices that could sense, move, and change colour and shape, enabling more realistic videoconferencing. The vision behind this research is to provide users with tangible forms of electronic information that express the appearance and actions of original sources.
Figures (8)






Related papers
Beyond Audio and Video: Using Claytronics to Enable Pario
Ai Magazine, 2009
In this article we describe a concept for a new type of material, which we call claytronics , made out of very large numbers-potentially millionsof submillimeter-sized spherical robots. While still only a concept, we have completed a considerable amount of initial design and experimentation work, enough at this point to allow us to understand what is readily achievable within a short time frame (less than a decade) and also to identify some of the most significant technical challenges yet to be overcome. To date, we have developed and analyzed several promising engineering designs, conducted numerous large-scale experiments on a high-fidelity physics-based simulator, and successfully carried out several prototype three-dimensional (3D) microelectromechanical systems (MEMS) manufacturing runs. These experiences lead us to believe that there are no fundamental software or hardware barriers to realizing claytronics on a large scale and within a few years.
Articles Beyond Audio and Video: Using Claytronics to Enable Pario
In this article we describe a concept for a new type of material, which we call claytronics (Goldstein, Campbell, and Mowry 2005), made out of very large numbers-potentially millionsof submillimeter-sized spherical robots. While still only a concept, we have completed a considerable amount of initial design and experimentation work, enough at this point to allow us to understand what is readily achievable within a short time frame (less than a decade) and also to identify some of the most significant technical challenges yet to be overcome. To date, we have developed and analyzed several promising engineering designs, conducted numerous large-scale experiments on a high-fidelity physics-based simulator, and successfully carried out several prototype three-dimensional (3D) microelectromechanical systems (MEMS) manufacturing runs. These experiences lead us to believe that there are no fundamental software or hardware barriers to realizing claytronics on a large scale and within a few years. While the most fundamental purpose of our research on claytronics is to understand manufacturing and programming of very large ensembles of independently actuated computing devices, it is also clear that such a material would have numerous practical applications, ranging from shape-shifting radio antennas (important for software-defined radios) to 3D fax machines. Perhaps our most fanciful-sounding application, however, is motivated by one of the most basic of human needs: to communicate and interact with others. Two centuries ago, the only practical way to carry on a real-time conversation with Articles
Claytronics: A scalable basis for future robots
2004
Claytronics is a form a programmable matter that takes the concept of modular robots to a new extreme. The concept of modular robots has been around for some time. (See [14] for a survey.) Previous approaches to modular robotics sought to create an ensemble of tens or even hundreds of small autonomous robots which could, through coordination, achieve a global effect not possible by any single unit. In general the goal of these projects was to adapt to the environment to facilitate, for example, improved locomotion. Our work on claytronics departs from previous work in several important ways. One of the primary goals of claytronics is to form the basis for a new media type, pario. Pario, a logical extension of audio and video, is a media type used to reproduce moving 3D objects in the real world. A direct result of our goal is that claytronics must scale to millions of micron-scale units. Having scaling (both in number and size) as a primary design goal impacts the work significantly...
Programmable Matter -Claytronics
Claytronics" is a developing field of electronics reconfigurable nano-scale robots ('claytronic atoms' or catoms) designed to form much larger machines or mechanisms.
Computing with Modular Robots
Cornell University - arXiv, 2022
Propagating patterns are used to transfer and process information in chemical and physical prototypes of unconventional computing devices. Logical values are represented by fronts of traveling diffusive, trigger or phase waves. We apply this concept of pattern based computation to develop experimental prototypes of computing circuits implemented in small modular robots. In the experimental prototypes the modular robots Cubelets are concatenated into channels and junction. The structures developed by Cubelets propagate signals in parallel and asynchronously. The approach is illustrated with a working circuit of a one-bit full adder. Complementarily a formalization of these constructions are developed across Sleptsov nets. Finally, a perspective to swarm dynamics is discussed.
Digital materialization: Additive and robotical manufacturing with clay and silicone
2016
Through the use of algorithmic design methods and an ever growing variety of digital fabrication tools the complexity of process in the architectural discipline seems to be increasing. As this statement might apply to a variety of different areas of computational design and process management, this perceived growing complexity does not have to be viewed as unnecessary complication of design processes, if palpable and justifiable benefits occur. This paper intends to analyse and investigate the potential arising from digital tools of fabrication, specifically robots and 3D printers, and from open source platforms on exploring and managing complexity while enabling both simplicity of process and simplicity of implementation through emerging open source cultures. Building on this assumptions, this paper explores the professional possibilities generated the implementation of robotics as part of the academic curriculum. The theoretical concept of Machinecraft will be introduced and showc...
Claytronics-modular robotics to a new extreme
Programmable Matter
Rajat Sharma
Department of Electronics and Communication Engineering
Model Institute of Engineering and Technology
Jammu, India.
rajatkathua@gmail.com
Abstract—The present paper deals with the concept of new
emerging technology called Claytronics. This paper explores the
published articles that report on results from research conducted
by the Intel and Carnegie Mellon University. Claytronics is a
form a programmable matter that takes the concept of modular
robots to a new extreme. The research is the brainchild of Seth
Goldstein, an Associate Professor in the Computer Science
Department at Carnegie Mellon University and Todd Mowry,
Director of Intel Research Pittsburgh. They determined that, by
taking advantage of advances in Nano-scale assembly, they might
create human replicas from ensembles of tiny computing devices
that could sense, move, and change colour and shape, enabling
more realistic videoconferencing. The vision behind this research
is to provide users with tangible forms of electronic information
that express the appearance and actions of original sources.
Keywords- Research design: Dynamic Physical rendering;
ensemble.
I.
INTRODUCTION
Imagine a lump of clay in hands. Children will love to
squeeze it in between fingers, potters will fire it into bowls and
artists will shape it into sculptures. This simple clay consists of
hundreds and thousands of microscopic particles. Can a
material be so intelligent that it changes its shape as we require.
The idea is simple: make basic computers housed in tiny
spheres that can connect to each other and rearrange
themselves. Each particle, called a Claytronic atom or Catom,
is less than a millimetre in diameter. With billions any object
can be created.
Catoms, or Claytronics Atoms, are also referred to as
'programmable matter'. These are basically miniature pieces of
matter so intricate that they can shape-shift into actual shapes
of whatever desired based on a quick, programmable system.
Catoms are described as being similar in nature to a Nanomachine, but with greater power and complexity. While
microscopic individually, they bond and work together on a
larger scale. Catoms can change their density, energy levels,
state of being, and other characteristics. This vision of
nanotechnology is light years away from today's world of
carbon nanotubes.
The research called "Claytronics" at Carnegie-Mellon
University, and "Dynamic Physical Rendering" at Intel is
already underway. According to the Claytronics project's Seth
Goldstein and Todd Mowry, programmable matter is:
An ensemble of material that contains sufficient
•
Local computation
•
Actuation
•
Storage
•
Energy
•
Sensing & communication
which can be programmed to form interesting dynamic
shapes and configurations.
This novel idea has evolved into an ambitious collaboration
involving almost 30 researchers. Jason Campbell, a senior
researcher at Intel Research Pittsburgh, is the Principal
Investigator for the DPR project. Goldstein is leading the
project for Carnegie Mellon, and Mowry provides additional
leadership. The project is being funded by Intel, Carnegie
Mellon University, the National Science Foundation, and the
Defence Advanced Research Projects Agency (DARPA).
Creation of claytronics technology is the bold objective of
collaborative research between Carnegie Mellon and Intel,
which combines nano-robotics and large-scale computing to
create synthetic reality, a revolutionary, 3-dimensional display
of information.
Claytronic emulation of the function, behaviour and
appearance of individuals, organisms and objects will fully
mimic reality - and fulfil a well-known criterion for artificial
intelligence formulated by the visionary mathematician and
computer science pioneer Alan Turing.
In 1950, in a ground-breaking article, Turing asked "Can
Machines Think?" and offered a criterion to "refute anyone
who doubts that a computer can really think." His proposal
was that "if an observer cannot distinguish the responses of a
programmed machine from those of a human being, the
machine is said to have passed the Turing Test."
Although the Turing Test remains a robust source of
discussion among those who devote their lives to artificial
intelligence, philosophy and cognitive science, claytronics
conceives of a technology that will surpass the Turing Test for
the appearance of thought in the behaviours of a machine.
The Carnegie Mellon Intel Claytronics Research Project
combines two principal paths to create technology that will
represent information in dynamic, life-like 3-D form-
Engineering design and testing of modular robotic
catom prototypes that will be suitable for
manufacturing in mass quantities
Creation of programming languages and software
algorithms to control ensembles of millions of catoms
II.
HARDWARE
At the current stage of design, claytronics hardware
operates from macro-scale designs with devices that are much
larger than the tiny modular robots that set the goals of this
engineering research. Such devices are designed to test
concepts for sub-millimeter scale modules and to elucidate
crucial effects of the physical and electrical forces that affect
nano-scale robots.
A. Electrostatic latches
Electrostatic Latches model a new system of binding and
releasing the connection between modular robots, a connection
that creates motion and transfers power and data while
employing a small factor of a powerful force. A simple and
robust inter-module latch is possibly the most important
component of a modular robotic system. The electrostatic latch
in Figure 1 was developed as part of the Carnegie Mellon-Intel
Claytronics Research Project. It incorporates many innovative
features into a simple, robust device for attaching adjacent
modules to each other in a lattice-style robotic system. These
features include a parallel plate capacitor constructed from
flexible electrodes of aluminium foil and dielectric film to
create an adhesion force from electrostatic pressure. Its
physical alignment of electrodes also enables the latch to
engage a mechanical shear force that strengthens its holding
force.
The electrodes that form the latch fit into "genderless" faces
constructed as star-shaped plastic frames carried by each
module. In the design of the circuits, each electrode functions
as one-half of a complete capacitor. A latch forms when the
faces of two adjacent modules come together and create an
electrostatic field between the flexible electrodes.
Figure 1. Electrostatic Latches (Source-www.cs.cmu.edu/~claytronics)
B. Cubes
A lattice-style modular robot, the 22-cubic-centimeter
Cube, which has been developed in the Carnegie Mellon-Intel
Claytronics Research Program, provides a base of actuation for
the electrostatic latch that has also been engineered as part of
this program. The Cube shown in Figure 2 also models the
primary building block in a hypothetical system for robotic
self-assembly that could be used for modular construction.
Cubes employ electrostatic latches to demonstrate the
functionality of a device that could be used in a system of
lattice-style self-assembly at both the macro and nano-scale.
The design of a cube, which resembles a box with
starbursts flowering from six sides, emphasizes several
performance criteria: accurate and fast engagement, facile
release and firm, strong adhesion while Cube latches clasps one
module to another. Its geometry enables reliable coupling of
modules, a strong binding electrostatic force and close spacing
of modules within an ensemble to create structural stability.
With extension and retraction of stem-drive arms that carry
the latches, the module achieves motion, exchanges power and
communicates with other Cubes in a matrix that contains many
of these devices.
Combining these forces of motion,
attachment and data coupling, Cubes demonstrate a potential to
create intricate forms from meta-modules or ensembles that
consist of much greater numbers of Cubes; numbers
determined by the scale of Cubes employed in an ensemble of
self-construction.
C. Planar Catoms
The self-actuating, cylinder-shaped planar catom tests
concepts of motion without moving parts, power distribution,
data transfer and communication that will be eventually
incorporated into ensembles of nano-scale robots. It provides a
test bed for the architecture of micro-electro-mechanical
systems for self-actuation in modular robotic devices.
Employing magnetic force to generate motion, its operations
as a research instrument build a bridge to a scale of
engineering that will make it possible to manufacture selfactuating nano-system devices.
Figure 2. Cubes
(Source-www.cs.cmu.edu/~claytronics)
Figure 4. Matrix of 20,000 catoms (Source-www.cs.cmu.edu/~claytronics)
Figure 3. Planar Catoms
(Source-www.cs.cmu.edu/~claytronics)
The planar catom is approximately 45 times larger in
diameter than the millimeter scale catom for which its work is
a bigger-than-life prototype. It operates on a two-dimensional
plane in small groups of two to seven modules in order to
allow researchers to understand how micro-electro-mechanical
devices can move and communicate at a scale that humans
cannot yet readily perceive or imagine.
Among the six faces, the triangular flaps provide each
catom with the means to form an electrostatic latch with
another cube from 24 positions - providing the cubes with a
capacity to move at right angles in any direction. In addition
to motion, the latches also equip the GHC with the means to
communicate across the ensemble of catoms. In Figure 4, one
Giant Helium Catom pivots across the surface of another,
revealing the positions and attachments of triangular
electrostatic flaps.
III.
SOFTWARE
A. Distributed Computing in Claytronics
In a domain of research defined by many of the greatest
challenges facing computer scientists and robot-cists today,
perhaps none is greater than the creation of algorithms and
programming language to organize the actions of millions of
sub-millimeter scale catoms in a claytronics ensemble.
As a consequence, the research scientists and engineers of
the Carnegie Mellon-Intel Claytronics Research Program have
formulated a very broad-based and in-depth research program
to develop a complete structure of software resources for the
creation and operation of the densely distributed network of
robotic nodes in a claytronic matrix.
A notable characteristic of a claytronic matrix is its huge
concentration of computational power within a small space.
For example, an ensemble of catoms with a physical volume of
one cubic meter could contain 1 billion catoms. Computing in
parallel, these tiny robots would provide unprecedented
computing capacity within a space not much larger than a
standard packing container. This arrangement of computing
capacity creates a challenging new programming environment
for authors of software.
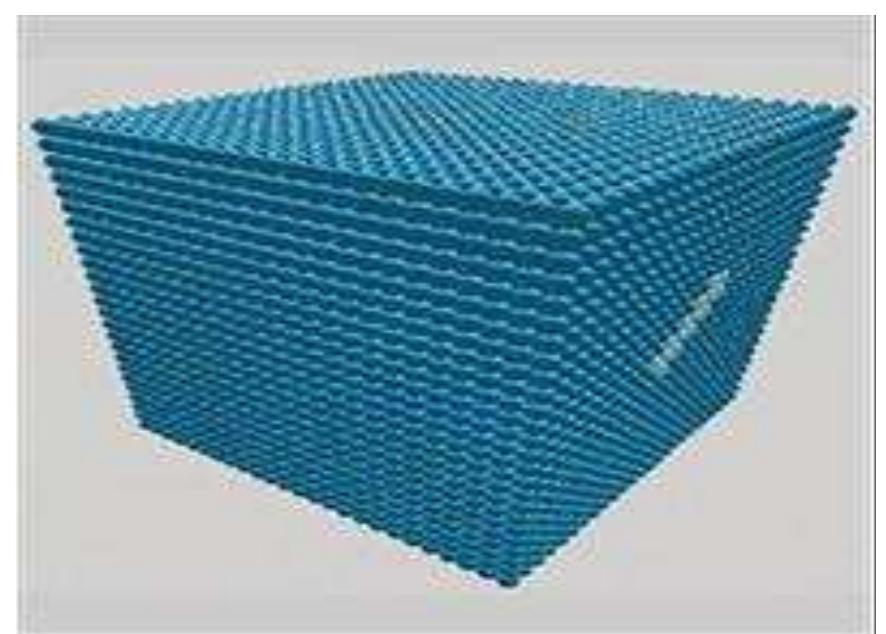
A representation of a matrix of approximately 20,000
catoms can be seen in the figure 5 shown. Because of its vast
number of individual computing nodes, the matrix invites
comparison with the worldwide reservoir of computing
resources connected through the Internet, a medium that not
only distributes data around the globe but also enables nodes
on the network to share work from remote locations. The
physical concentration of millions of computing nodes in the
small space of a claytronic ensemble thus suggests for it the
metaphor of an Internet that sits on a desk.
B. An Internet in a box
Comparison with the Internet, however, does not represent
much of the novel complexity of a claytronic ensemble. For
example, a matrix of catoms will not have wires and unique
addresses which in cyberspace provide fixed paths on which
data travels between computers. Without wires to tether them,
the atomized nodes of a claytronic matrix will operate in a
state of constant flux. The consequences of computing in a
network without wires and addresses for individual nodes are
significant and largely unfamiliar to the current operations of
network technology.
Languages to program a matrix require a more abbreviated
syntax and style of command than the lengthy instructions that
widely used network languages such as C++ and Java employ
when translating data for computers linked to the Internet.
Such widely used programming languages work in a network
environment where paths between computing nodes can be
clearly flagged for the transmission of instructions while the
computers remain under the control of individual operators
and function with a high degree of independence behind their
links to the network.
In contrast to that tightly linked programming environment
of multi-functional machines, where C++, Java and similar
languages evolved, a claytronic matrix presents a software
developer with a highly organized, single-purpose, densely
concentrated and physically dynamic network of unwired
nodes that create connections by rotating contacts with the
closest neighbors. Matrix software must also actuate the
Figure 5. Simulation of Meld (Source-www.cs.cmu.edu/~claytronics)
Figure 6. Snapshot in DPRSim (Source-www.cs.cmu.edu/~claytronics)
constant change in the physical locations of the anonymous
nodes while they are transferring the data through the network.
test and visualize the behaviour of catoms. The simulator
creates a world in which catoms take on the characteristics
that researchers wish to observe.
DPRSim operates as a Linux-based system on desktop
computers. It is available as open source software. DPRSim
has become the primary tool of the Carnegie Mellon-Intel
Claytronics Research Project for observing real-time
performance when designing, testing and debugging modular
robots in claytronic ensembles.
The simulated world of DPRSim manifests characteristics
that are crucial to understanding the real-time performance of
claytronic ensembles. Most important, the activities of catoms
in the simulator are governed by laws of the physical universe.
Thus simulated catoms reflect the natural effects of gravity,
electrical and magnetic forces and other phenomena that will
determine the behaviour of these devices in reality. DPRSim
also provides a visual display that allows researchers to
observe the behaviour of groups of catoms. In this context,
DPRSim allows researchers to model conditions under which
they wish to test actions of catoms. Figure 8 presents snapshot
from simulations of programs generated through DPRSim.
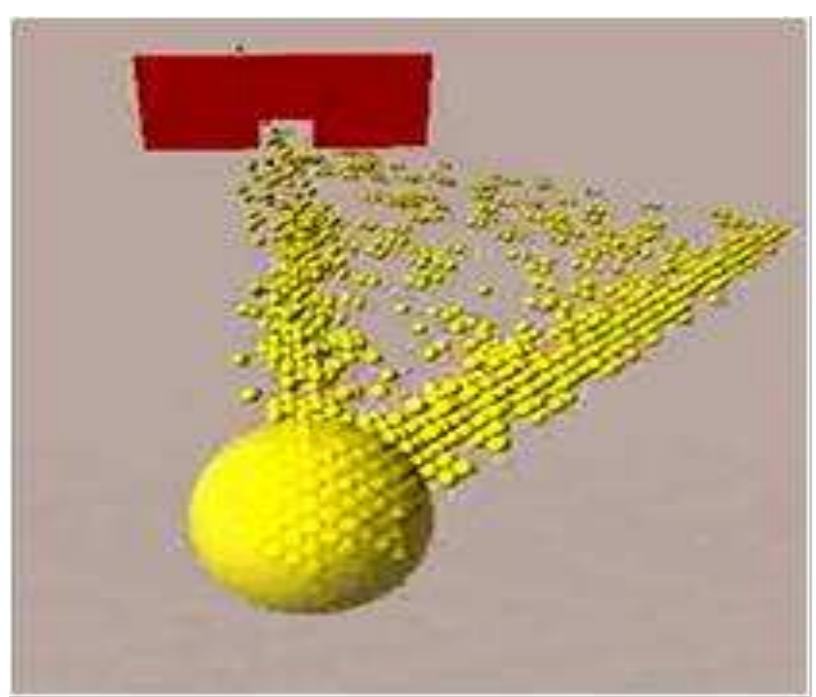
C. Programming Languages
Researchers in the Claytronics project have also created
Meld and LDP. These new languages for declarative
programming provide compact linguistic structures for
cooperative management of the motion of millions of modules
in a matrix. Figure 7 shows a simulation of Meld in which
modules in the matrix have been instructed with a very few
lines of highly condensed code to swarm toward a target.
Meld is a programming language designed for robustly
programming massive ensembles. Meld was designed to give
the programmer an ensemble-centric viewpoint, where they
write a program for an ensemble rather than the modules that
make it up. A program is then compiled into individual
programs for the nodes that make up the ensemble. In this way
the programmer need not worry about the details of
programming a distributed system and can focus on the logic of
their program.
Because Meld is a declarative programming language
(specifically, a logic programming language), the programs
written in Meld are concise. Both the localization algorithm
and the metamodule planning algorithms are implemented in
Meld in only a few pages of code.
While Meld approaches the management of the matrix from
the perspective of logic programming, LDP employs
distributive pattern matching. As a further development of
program languages for the matrix, LDP, which stands for
Locally Distributed Predicates, provides a means of matching
distributed patterns. This tool enables the programmer to
address a larger set of variables with Boolean logic that
matches paired conditions and enables the program to search
for larger patterns of activity and behaviour among groups of
modules in the matrix.
D. Dynamic Simulation
As a first step in developing software to program a
claytronic ensemble, the team created DPR-Simulator, a tool
IV.
CAPABILITIES OF CATOMS
Computation: Researchers believe that catoms could
take advantage of existing microprocessor technology.
Given that some modern microprocessor cores are now
under a square millimeter, they believe that a
reasonable amount of computational capacity should fit
on the several square millimeters of surface area
potentially available in a 2mm-diameter catom.
Motion: Although they will move, catoms will have no
moving parts. This will enable them to form
connections much more rapidly than traditional microrobots, and it will make them easier to manufacture in
high volume. Catoms will bind to one another and
move via electromagnetic or electrostatic forces,
depending on the catom size.
Imagine a catom that is close to spherical in
shape, and whose perimeter is covered by small
electromagnets. A catom will move itself around by
Power: Catoms must be able to draw power without
having to rely on a bulky battery or a wired
connection. Under a novel resistor-network design the
researchers have developed, only a few catoms must be
connected in order for the entire ensemble to draw
power. When connected catoms are energized, this
triggers active routing algorithms which distribute
power throughout the ensemble.
Communications: Communications is perhaps the
biggest challenge that researchers face in designing
catoms. An ensemble could contain millions or billions
of catoms, and because of the way in which they pack,
there could be as many as six axes of interconnection.
At a high level, there are two steps:
energizing a particular magnet and cooperating with a
neighbouring catom to do the same, drawing the pair
together. If both catoms are free, they will spin equally
about their axes, but if one catom is held rigid by links
to its neighbours, the other will swing around the first,
rolling across the fixed catom's surface and into a new
position. Electrostatic actuation will be required once
catom sizes shrink to less than a millimeter or two. The
process will be essentially the same, but rather than
electromagnets, the perimeter of the catom will be
covered with conductive plates. By selectively
applying electric charges to the plates, each catom will
be able to move relative to its neighbours.
Another unique feature of catom networks is that
catoms are homogeneous. Thus, unlike cell phones or
other communications devices, the identity of an
individual catom is sometimes (but not always)
unimportant. An application is more likely to care
about routing a message to the catoms comprising a
specific physical part of an ensemble (for instance, the
catoms comprising a "hand") rather than sending the
same message to specific catoms based on their serial
numbers. Furthermore, catoms may be in motion
periodically, as the shape of the ensemble changes.
Creating the replica: Researchers at Carnegie Mellon
University also are exploring 3D image capture, in the
Virtualized Reality project. They have developed
technology that points a set of cameras at an event and
enables the viewer to virtually fly around and watch
the event from a variety of positions. The DPR
researchers believe a similar approach could be used to
capture 3D scenes for use in creating physical, moving
3D replicas.
Figure 7. Replica Formation
(Source: www.intel.com)
•Capturing a moving, three-dimensional image and
•Rendering it as a physical object.
Replicas will be created from Catoms. Catoms
can be framed into different shapes, and it can change
color, through light-emitting diodes on its surface.
Embedded photo cells will enable it to sense light, so
that a human replica can "see." Catoms might even
simulate the texture of the person or object being
replicated. A replica will have computing capabilities,
but these will be accessed through touch, voice, or
another natural interface rather than a keyboard or
mouse. Catoms will be as close to spherical as possible
to support multiple packing densities.
V.
APPLICATIONS
The potential applications of dynamic physical rendering
are limited only by the imagination. Following are a few of the
possibilities:
Medicine: A replica of your physician could appear in
your living room and perform an exam. The virtual
doctor would precisely mimic the shape, appearance
and movements of your "real" doctor, who is
performing the actual work from a remote office.
Disaster relief: Human replicas could serve as standins for medical personnel, firefighters, or disaster relief
workers. Objects made of programmable matter could
be used to perform hazardous work and could morph
into different shapes to serve multiple purposes. A fire
hose could become a shovel, a ladder could be
transformed into a stretcher.
Entertainment: A football game, ice skating
competition or other sporting event could be replicated
in miniature on your coffee table. A movie could be
recreated in your living room, and you could insert
yourself into the role of one of the actors.
3D physical modeling: Physical replicas could replace
3D computer models, which can only be viewed in two
(Source: www.cs.cmu.edu/~claytronics)
Figure 8. 3D model of Car formed by Catoms
dimensions and must be accessed through a keyboard
and mouse. Using claytronics, you could reshape or
resize a model car or home with your hands, as if you
were working with modeling clay. As you manipulated
the model directly, aided by embedded software that's
similar to the drawing tools found in office software
programs, the appropriate computations would be
carried out automatically. You would not have to work
at a computer at all; you would simply work with the
model. Using claytronics, multiple people at different
locations could work on the same model. As a person
at one location manipulated the model, it would be
modified at every location.
VI.
ENVISIONING THE FUTURE
Backed by the microchip manufacturer Intel, first
generation catoms, measuring 4.4 centimeters in diameter and
3.6 centimeters in height have already been created. The goal is
to eventually produce catoms that are one or two millimeters in
diameter-small enough to produce convincing replicas. It's not
just a problem of building tiny robots, but figuring out how to
power them, to get them to stick together and to coordinate and
control millions or billions of them. These catoms, which are
ringed by several electromagnets, are able to move around each
other to form a variety of shapes containing rudimentary
processors and drawing electricity from a board that they rest
upon. So far only four catoms have been operated together. The
plan though is to have thousands of them moving around each
other to form whatever shape is desired and to change colour,
also as required.
Five years from now, the DPR researchers expect to have
working ensembles of catoms that are close to spherical in
shape. These catoms still will be large enough that no one will
confuse a replica with the real thing (for that, catoms will
probably have to shrink to less than a millimeter in diameter).
But the catoms will be sufficiently robust that researchers can
experiment with a variety of shapes, test hypotheses about
ensemble behaviour, and begin to envision where the
technology might lead within a decade or two.
While the potential applications of dynamic physical
rendering are exciting, the work being done at Intel Research
Pittsburgh and Carnegie Mellon University has broader
implications. At its core, the research involves learning to
design, power, program and control a densely packed set of
microprocessors. These are similar to the key challenges facing
the computer industry today. As a result, the DPR research is
likely to produce new insights and technologies that could
influence the future of computing and communications.
If, in 1960, someone had suggested that one day you could
buy a million transistors for a penny, the prediction would have
seemed outlandish. But today Intel sells transistors for less than
a micro cent, thanks to the continuing technology advances
predicted by Moore's Law. It's not unreasonable to predict that
one day far in the future; it may be possible to buy a million
catoms for a penny.
But dynamic physical rendering could become viable long
before Moore's Law drives down the cost of a catom to a
micro-cent. Even if catoms could be produced for a dollar each,
some visualization applications might be economically viable.
Whatever the cost, building catoms that are one millimeter
in diameter-small enough to create convincing replicas-will be
a difficult engineering challenge. But given current industry
knowledge and the state of the art of silicon technology, it is
not outside the realm of possibility. The challenge lies less in
developing new technology than in bringing together a number
of research areas in which the industry has made tremendous
technical progress in the last decade.
ACKNOWLEDGMENT
In the preparation of this research paper, I am grateful to
the Principal of MIET and specially to Lecturer Parshotam
Sharma, H.O.D. of E.C.E. Dept., who have left no stone
unturned for the successful completion of this paper.
I have received help and encouragement for which I am
deeply grateful to my friends- Shwetanshu Gupta, Vivek Singh,
Rajat Basotra, Sahil Dogra, Rahul Lakhanpuria, Rameshwar
Sharma, Varinder Singh, Sourab Sharma and Ankush Sharma.
My special dept. of gratitude to my grandfather Sh. Jai Dev
Sharma, my father Sh. Joginder Raj Sharma and my mother
Smt. Suman Sharma for their help and motivation.
REFERENCES
[1]
www.cs.cmu.edu/~claytronics(Carnegie Mellon University official
website: dated- 09/09/11)
[2] S.Goldstein, J. Campbell, and T. Mowry, “Programmable matter,” IEEE
Computer, vol. 38, 6, pp. 99–101, May 2005.
[3] G. Chirikjian, A. Pamecha, and I. Ebert-Uphoff, “Evaluating efficiency
of self-reconfiguration in a class of modular robots,” Journal of robotic
systems, vol. 13, no. 5, pp. 317 – 338, 1996.
[4] Michael P. Ashley-Rollman, Michael De Rosa, Siddhartha S. Srinivasa,
Padmanabhan Pillai, Seth Copen Goldstein, Jason Campbell,
“Declarative programming for modular robots” unpublished.
[5] M. Ashley-Rollman, S. C. Goldstein, P. Lee, T. Mowry, and P. Pillai,
“Meld: A declarative approach to programming ensembles,” in
Proceedings of IEEE/RSJ Conference on Intelligent Robots and Systems
(IROS), 2007.
[6] Brian Kirby, Jason Campbell, Burak Aksak, Padmanabhan Pillai, James
Hoburg, Todd Mowry, Seth Copen Goldstein “Catoms: moving robots
without moving parts” unpublished.
[7] A. Pamecha, I. Ebert-Uphoff, and G. Chirikjian, “Useful metrics for
modular robot motion planning,” in IEEE Transactions on Robotics and
Automation, vol. 13, 1997.
[8] James Cameron and William Wisher Jr. Terminator 2: Judgment Day.
Columbia TriStar, 1991.
[9] D. Soloveichik and E. Winfree, “Complexity of self-assembled shapes,”
in DNA Computers 10, 2005.
[10] Dprsim available[Online]:
http://www.pittsburgh.intelresearch.net/dprweb/
Related topics
- Find new research papers in:
- Physics
- Chemistry
- Biology
- Health Sciences
- Ecology
- Earth Sciences
- Cognitive Science
- Mathematics
- Computer Science